Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Оренбургский государственный университет»
С. В. Каменев
ОСНОВЫ МЕТОДА КОНЕЧНЫХ
ЭЛЕМЕНТОВ В ИНЖЕНЕРНЫХ
ПРИЛОЖЕНИЯХ
Учебное пособие
Рекомендовано
ученым
советом
федерального
государственного
бюджетного
образовательного
учреждения
высшего
образования
«Оренбургский государственный университет» для обучающихся по
образовательным программам высшего образования по направлениям
подготовки
15.03.05
Конструкторско-технологическое
обеспечение
машиностроительных производств и 15.03.06 Мехатроника и робототехника
Оренбург
2019
УДК 62-11+004.94 (075.8)
ББК 30.4-02я73
К18
Рецензент – профессор, доктор технических наук А. П. Фот
К18
Каменев, С. В.
Основы метода конечных элементов в инженерных приложениях: учебное
пособие / С. В. Каменев; Оренбургский гос. ун-т. – Оренбург: ОГУ, 2019. –
110 с.
ISBN
В учебном пособии рассмотрены особенности метода конечных элементов
как математической основы большинства современных CAE-систем, используемых при проектировании машиностроительных изделий. Приведены сведения об
основных типах конечных элементов и методах автоматизированной конечноэлементной дискретизации пространства и времени. Кратко освещены вопросы
моделирования поведения материалов и решения конечно-элементных уравнений.
Учебное пособие предназначено для обучающихся по направлениям подготовки 15.03.05 Конструкторско-технологическое обеспечение машиностроительных производств и 15.03.06 Мехатроника и робототехника, изучающих дисциплины «Математическое моделирование процессов в машиностроении» и
«Компьютерное моделирование процессов в машиностроении».
Учебное пособие подготовлено в рамках проектов по совершенствованию содержания и технологий целевого обучения студентов в интересах организаций оборонно-промышленного комплекса («Новые кадры ОПК - 2016»).
УДК 62-11+004.94 (075.8)
ББК 30.4-02я73
ISBN
© Каменев С. В., 2019
© ОГУ, 2019
Содержание
Введение ........................................................................................................................... 5
1 Базовые положения метода конечных элементов ...................................................... 6
1.1 Понятие метода конечных элементов ....................................................................... 6
1.2 Сравнительная оценка точности метода конечных элементов ................................ 9
1.3 Обобщенная процедура конечно-элементного анализа ......................................... 12
1.3.1 Препроцессирование ............................................................................................ 13
1.3.2 Решение ................................................................................................................ 13
1.3.3 Постпроцессирование .......................................................................................... 13
1.4 Контрольные вопросы ............................................................................................. 14
2 Основные типы конечных элементов ....................................................................... 15
2.1 Пружинный конечный элемент ............................................................................... 15
2.1.1 Матрица жесткости .............................................................................................. 15
2.1.2 Линейная пружина как конечный элемент ......................................................... 15
2.1.3 Системы пружин .................................................................................................. 18
2.2 Стержневой или ферменный конечный элемент .................................................... 22
2.3 Балочный конечный элемент ................................................................................... 27
2.4 Пластинчатый конечный элемент ........................................................................... 38
2.5 Объемный тетраэдрический элемент ...................................................................... 49
2.6 Контрольные вопросы ............................................................................................. 57
3 Конечно-элементная дискретизация ......................................................................... 59
3.1 Дискретная модель решаемой задачи ..................................................................... 59
3.2 Генерация конечно-элементной сетки .................................................................... 60
3.3 Структурированные и неструктурированные сетки .............................................. 63
3.4 Методы построения структурированных сеток...................................................... 65
3.5 Методы построения неструктурированных сеток .................................................. 68
3.5.1 Методы пространственной декомпозиции ......................................................... 69
3.5.2 Метод продвигаемого фронта ............................................................................. 72
3.5.3 Методы триангуляции Делоне ............................................................................ 74
3.6 Повышение качества сетки ...................................................................................... 78
3
3.6.1 Преобразование типов элементов ....................................................................... 79
3.6.2 Плотность и согласованность сетки .................................................................... 79
3.6.3 Сглаживание сетки ............................................................................................... 83
3.7 Дискретизация по времени ...................................................................................... 85
3.8 Контрольные вопросы ............................................................................................. 88
4 Моделирование материалов ...................................................................................... 90
4.1 Современные подходы к моделированию материалов .......................................... 90
4.1.1 Фундаментальный подход ................................................................................... 90
4.1.2 Феноменологический подход .............................................................................. 91
4.1.3 Статистический подход ....................................................................................... 92
4.2 Модели материалов, используемые в конечно-элементном анализе .................... 92
4.2.1 Модели для механических приложений ............................................................. 92
4.2.2 Модели для температурных приложений ........................................................... 98
4.2.3 Модели для электромагнитных приложений ................................................... 100
4.3 Параметры материалов .......................................................................................... 100
4.4 Контрольные вопросы ........................................................................................... 102
5 Краткие сведения о решении конечно-элементных уравнений ............................ 104
5.1 Решение уравнений равновесия в статическом анализе ...................................... 104
5.2 Решение задач на собственные значения .............................................................. 106
5.3 Решение уравнений равновесия в динамическом анализе................................... 108
5.4 Контрольные вопросы ........................................................................................... 109
Список использованных источников .......................................................................... 110
4
Введение
В профессиональной деятельности инженера часто возникает необходимость
решения прикладных задач, связанных с математическим моделированием физических объектов, процессов или явлений. Математические модели многих прикладных
задач представляют собой дифференциальные уравнения в сочетании с набором соответствующих граничных и/или начальных условий, которые выводятся путем
применения фундаментальных физических законов к рассматриваемой системе.
Как правило, точное решение этих уравнений, выражающих баланс масс, сил
или энергии, не может быть получено аналитическими методами в силу сложности
уравнений и затруднений с граничными и начальными условиями. Это заставляет
прибегать к использованию различных численных методов, дающих приближенное
решение задачи. В отличие от аналитических методов, точно описывающих поведение системы в любой ее точке, численные методы аппроксимируют точное решение
только в отдельных точках, называемых узлами расчетной сетки. Для построения
расчетной сетки предварительно выполняется дискретизация пространства при помощи специальных алгоритмов.
Существующие численные методы решения подразделяются на два обобщенных класса, которыми являются метод конечных разностей и метод конечных элементов. Метод конечных разностей основан на записи дифференциальных уравнений для
каждого узла и замене производных разностными схемами, что дает систему простых
алгебраических уравнений. Данный метод относительно легок в использовании для
простых задач, однако становится затруднительным для задач, связанных со сложной
геометрией, сложными граничными условиями и неизотропными материалами.
По этой причине большее распространение в настоящее время получил метод
конечных элементов, который для вывода системы алгебраических уравнений использует интегральную формулировку. Данный метод является математической основой большинства современных систем инженерного анализа (CAE-систем), которые успешно используются для решения широкого круга задач различной физической природы. Предлагаемое учебное пособие посвящено рассмотрению основ метода конечных элементов в инженерно-технических приложениях.
5
1 Базовые положения метода конечных элементов
1.1 Понятие метода конечных элементов
Метод конечных элементов (МКЭ), иногда также упоминаемый как конечноэлементный анализ, представляет собой численный метод приближенного решения
краевых (граничных) задач, имеющих место в технике и математической физике. В
простейшей постановке краевая задача является математической задачей, в которой
одна или несколько зависимых переменных должны удовлетворять дифференциальному уравнению в известной области независимых переменных, и удовлетворять
определенным условиям, заданным на границах этой области [4].
Краевые задачи также иногда называются задачами теории поля. Под полем
понимается исследуемая область, которая чаще всего представляется физической
структурой. Полевые переменные являются рассматриваемыми зависимыми переменными, определяемыми дифференциальным уравнением. Граничные условия
представляют собой заданные на границах поля значения полевых переменных (или
связанных величин, таких как производные). В зависимости от типа решаемой физической задачи полевые переменные могут выражать физические перемещения,
температуры, тепловые потоки, электрические токи и множество других величин.
Общая методика и терминология конечно-элементного анализа могут быть
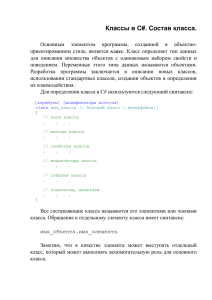
объяснены при помощи примера, показанного на рисунке 1. Рисунок 1а изображает
объем некоторого материала с известными физическими свойствами. Данный объем
представляет собой область решаемой краевой задачи. Для упрощения рассматривается двухмерный случай с единственной полевой переменной (x, y), определяемой
в каждой точке P(x, y) такой, что определяющее уравнение (или уравнения) точно
имеет в ней решение.
Нужно заметить, что это предполагает наличие точного математического решения, т.е. решения в форме аналитического выражения независимых переменных.
Однако на практике область может иметь сложную геометрию и часто сложное
определяющее уравнение, в связи с чем получение точного аналитического решения
представляется очень маловероятным. Поэтому в инженерном анализе сложных за6
дач наиболее часто используются приближенные решения, основанные на вычислительных методах. Метод конечных элементов является эффективным методом получения таких приближенных решений с хорошей точностью.
Рисунок 1 – Область решаемой краевой задачи
На рисунке 1б показан треугольный элемент, заключающий в себе конечноразмерную подобласть рассматриваемой области. Поскольку этот элемент не является дифференциалом площади размером dx×dy, постольку он является конечным
элементом. Так как данный пример интерпретируется как двухмерная задача, то
здесь предполагается, что толщина области в направлении оси z постоянна и зависимость от координаты z не учитывается в определяющем дифференциальном уравнении. Вершины треугольного элемента пронумерованы, чтобы показать, что эти
точки являются узлами. Узел представляет собой специфическую точку конечного
элемента, в которой значение полевой переменной вычисляется в явном виде. Узлы,
расположенные на границах конечного элемента, называются внешними узлами, и
могут быть использованы для соединения элемента со смежными элементами. Узлы,
которые не лежат на границах элемента называются внутренними и не могут соединяться с любым другим элементом. Треугольный элемент, показанный на рисунке 1б,
имеет только внешние узлы.
В связи с тем, что значения полевой переменной вычисляются только в узлах,
возникает логичный вопрос, каким образом эти значения определяются в других
точках внутри элемента? Ответ на этот вопрос содержит самую суть метода конечных элементов: значения полевой переменной, вычисляемые в узлах, используются
для аппроксимации значений в неузловых точках (т.е. расположенных внутри эле7
мента) путем интерполяции узловых значений. Для трехузлового треугольного элемента все узлы являются внешними, поэтому в любой другой точке внутри элемента
полевая переменная описывается приближенной зависимостью вида:
x, y N1 x, y 1 N 2 x, y 2 N 3 x, y 3
(1)
где 1, 2, 3 – значения полевой переменной в соответствующих узлах;
N1, N2, N3 – интерполяционные функции, также известные как функции
формы или стыковочные функции.
В методе конечных элементов узловые значения полевой переменной интерпретируются как подлежащие определению неизвестные константы. Интерполяционные функции являются функциями независимых переменных, которые чаще всего
имеют полиномиальную форму и выводятся таким образом, чтобы удовлетворять
некоторым условиям, заданным в узлах. Здесь важно отметить то, что интерполяционные функции являются предопределенными, известными функциями независимых переменных и то, что эти функции описывают изменение полевой переменной
в пределах конечного элемента.
Треугольный элемент, описываемый уравнением (1), характеризуется наличием трех степеней свободы, так как для описания полевой переменной в любой точке
элемента требуются три узловых значения этой переменной. Это может наблюдаться в случае, если полевая переменная представляет скалярное поле, такое как температура в задачах теплопереноса. Если область на рисунке 1 будет представлять
твердотельный объект малой постоянной толщины, находящийся в плоском напряженном состоянии, то полевая переменная становится вектором перемещения, и в
каждом узле должны вычисляться величины двух его компонентов. В последнем
случае треугольный трехузловой элемент характеризуется шестью степенями свободы. В общем случае число степеней свободы конечного элемента равно произведению числа узлов и числа значений полевой переменной, которые должны вычисляться в каждом узле.
8
Благодаря соединениям элемента своими внешними узлами с другими элементами (рисунок 1в) вся рассматриваемая область может быть представлена как набор
связанных элементов. При этом уравнения конечного элемента формулируются таким образом, чтобы значение полевой переменной в узловом соединении было одинаковым для всех соединяемых в нем элементов. Это обеспечивает непрерывность
полевой переменной. Существующие формулировки конечных элементов также
обеспечивают непрерывность полевой переменной и при переходе через границы
соседних элементов. Данная особенность позволяет избежать физически неприемлемую возможность образования в исследуемой области зазоров или пустот.
1.2 Сравнительная оценка точности метода конечных элементов
Процесс представления физической области конечными элементами называется генерацией сетки, а получающийся в итоге набор элементов – конечноэлементной сеткой. В связи с тем, что большинство используемых элементов имеют
геометрию с прямолинейными сторонами практически невозможно полностью
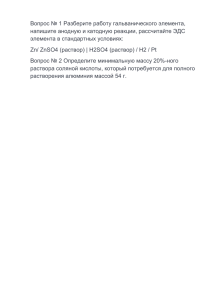
включить физическую область в конечно-элементную сетку при наличии в ней криволинейных границ. Такая ситуация показана на рисунке 2а, где изображена область
с криволинейными границами, на которую наложена сетка (достаточно грубая) элементов квадратной формы. Улучшенная сетка для той же области показана на рисунке 2б, полученная с использованием большего числа элементов меньшего размера. Очевидно, что улучшенная сетка включает более значительную площадь физической области в конечно-элементное представление, а ее криволинейные границы
аппроксимируются более точно.
Рисунок 2 – Грубая и точная сетка в области с криволинейными границами
9
Если интерполяционные функции будут удовлетворять определенным математическим условиям, то конечно-элементное решение для конкретной задачи сойдется с ее точным решением. То есть точность конечно-элементного решения постепенно возрастает по мере увеличения числа элементов и уменьшения их размера.
Примером этого может служить решение относительно простой задачи, расчетная
схема которой приведена на рисунке 3.
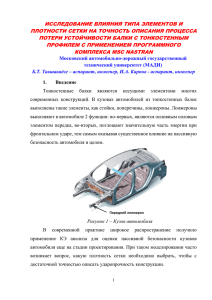
Рисунок 3 – Конечно-элементное представление конического стержня
На рисунке 3а изображен сплошной стержень в форме усеченного конуса,
один конец которого жестко зафиксирован, а ко второму приложена растягивающая
нагрузка. Приняв во внимание, что искомым результатом является перемещение
точки приложения нагрузки, может быть получено первое приближенное решение
путем представления стержня в виде цилиндра постоянного сечения с площадью
равной средней площади сечения исходного конического стержня (рисунок 3б). В
данном случае для построения конечно-элементной модели может быть использован
единственный элемент типа стержень. Ее простейшее решение выводится методами
10
сопротивления материалов. Далее конический стержень представляется в виде двух
последовательных цилиндров, как показано на рисунке 3в. В такой двухэлементной
модели длина каждого элемента равна половине общей длины исходного стержня, а
площадь их сечения равна средней площади соответствующих конических участков
половинной длины. Продолжая улучшать конечно-элементное разбиение можно получить четырехэлементную модель (рисунок 3г) и т.д. Результаты приближенного
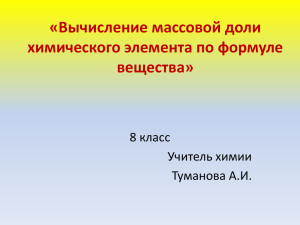
решения данной задачи для каждой конечно-элементной модели в сравнении с результатом его точного решения показаны на рисунке 4. Как видно на приведенном
рисунке сходимость точного и приближенного решения экспоненциально возрастает
с увеличением числа элементов в модели.
Рисунок 4 – Результаты точного и приближенного решения
Данный пример показывает, как изменяется основная полевая переменная, которой является перемещение, в зависимости от степени конечно-элементной дискретизации рассматриваемой области. Однако в большинстве инженерных задач
помимо перемещений требуется определять и механические напряжения, возникающие под воздействием заданных нагрузок. Эти напряжения должны рассчитываться на основе соответствующих зависимостей между напряжениями и относительными деформациями, а компоненты относительной деформации выводиться из результатов вычисления поля перемещений. Отсюда следует, что напряжения и относительные деформации являются производными переменными.
11
Если в рассматриваемом примере изобразить на графике результаты расчета
напряжений для двух- и четырехэлементной модели, то можно увидеть, что напряжения постоянны в пределах каждого элемента и представляют собой дискретное
решение задачи в отношении напряжений и деформаций (рисунок 5). Так же можно
заметить, что увеличение числа элементов приводит к уменьшению величины скачков напряжения. Данное обстоятельство является характерной чертой метода конечных элементов. Формулировка метода конечных элементов такова, что основная полевая переменная для данной задачи является непрерывной от элемента к элементу,
а производные переменные могут быть прерывистыми.
Рисунок 5 – Сравнение расчетных величин осевых напряжений в коническом
стержне
1.3 Обобщенная процедура конечно-элементного анализа
Определенные этапы конечно-элементного анализа физической задачи являются общими для всех случаев такого анализа, будь то задача механики твердого тела, задача теплопереноса, гидрогазодинамики или какая-нибудь другая задача. Все
эти этапы реализуются в коммерческих программных пакетах конечно-элементного
анализа. Такими этапами являются препроцессирование, решение и постпроцессирование.
12
1.3.1 Препроцессирование
Этап препроцессирования обычно описывается как процесс определения модели, который включает в себя:
‐ определение геометрической области решаемой задачи;
‐ определение типа (типов) используемых элементов;
‐ определение свойств материала элементов;
‐ определение геометрических характеристик элементов (длина, площадь и т.п.);
‐ определение связности элементов (генерацию сеточной модели);
‐ определение физических ограничений (граничных условий);
‐ определение нагрузок.
Препроцессирование (определение модели) является наиболее критическим
этапом анализа. Данный факт объясняется тем, что при неправильном определении
модели, т.е. при неверных входных данных будут получены неверные результаты решения. Иначе говоря, даже идеально выполненное конечно-элементное решение абсолютно ничего не значит, если оно соответствует некорректно поставленной задаче.
1.3.2 Решение
Во время фазы решения программное обеспечение конечно-элементного анализа формирует системы алгебраических уравнений в матричной форме и вычисляет
неизвестные величины основной полевой переменной (переменных). Вычисленные
величины затем используются для определения дополнительных производных переменных, таких как реактивные силы, элементные напряжения, тепловые потоки и т.п.
Поскольку конечно-элементная модель часто описывается десятками тысяч
уравнений, постольку для снижения требуемого объема данных и времени вычислений применяются специальные методы решения. Например, для статических линейных задач решение уравнений обычно осуществляется методом Гаусса.
1.3.3 Постпроцессирование
Анализ и оценку результатов решения принято называть постпроцессированием. Соответствующий программный модуль, в котором осуществляются эти дей13
ствия, называется постпроцессором. Постпроцессор содержит сложные программные алгоритмы, служащие для сортировки, визуализации и печати избранных результатов конечно-элементного решения. Операции, выполняемые в ходе препроцессирования, могут включать в себя:
‐ сортировку результатов решения по возрастанию или убыванию величины;
‐ вычисление коэффициентов запаса по тому или иному показателю;
‐ отображение деформированного состояния конструкции;
‐ анимацию динамического поведения модели;
‐ отображение контурных полей различных величин.
Препроцессирование позволяет манипулировать результатами решения различными способами, однако главной его целью является принятие обоснованного
инженерного решения в отношении приемлемости этих результатов с точки зрения
физики моделируемого объекта или процесса.
1.4 Контрольные вопросы
1 Что понимается в математике под краевой (граничной) задачей?
2 Чем характеризуются задачи теории поля?
3 Что собой представляют узлы конечных элементов?
4 Что собой представляют интерполяционные функции (функции формы) конечных элементов?
5 Каким образом определяется число степеней свободы конечного элемента?
6 Каким образом влияет степень дискретизации пространства на точность конечно-элементного решения?
7 Какие действия включает в себя этап препроцессирования конечноэлементного анализа?
8 Что включает в себя фаза решения конечно-элементного анализа?
9 Какие типовые операции выполняются на этапе постпроцессирования конечно-элементного анализа?
14
2 Основные типы конечных элементов
2.1 Пружинный конечный элемент
2.1.1 Матрица жесткости
Основные характеристики конечного элемента выражаются его матрицей
жесткости. Для конструкционного конечного элемента матрица жесткости содержит
информацию о геометрии и свойствах материала, которая задает сопротивление
элемента деформации под воздействием нагрузки. Такая деформация может включать растяжение-сжатие, изгиб, сдвиг и кручение. Для конечных элементов, используемых в немеханических видах анализа, таких как гидрогазодинамика и теплопередача также используется термин «матрица жесткости», поскольку матрица в данном
случае определяет сопротивление элемента изменениям, которые вызываются
внешними воздействиями. Особенности построения матрицы жесткости удобно рассмотреть на примере простейшего типа конечных элементов, которым является
пружинный элемент [4].
2.1.2 Линейная пружина как конечный элемент
Линейная упругая пружина является механическим устройством, способным
воспринимать только осевую нагрузку, и растяжение или сжатие пружины прямо
пропорционально величине приложенной осевой нагрузки. Коэффициент пропорциональности между деформацией и нагрузкой называется постоянной пружины, чувствительностью пружины или жесткостью пружины k, и имеет размерность отношения единицы силы к единице длины.
Формулировка пружины в качестве конечного элемента может быть выполнена на основе схемы, приведенной на рисунке 6. Так как упругая пружина воспринимает только осевую нагрузку, система координат элемента (также известная как локальная система координат) на схеме выбрана так, чтобы ось x была направлена
вдоль оси пружины. Выбор такой системы координат, связанной с элементом, обусловлен геометрией пружины и простотой в дальнейшем описании характеристик
элемента.
15
Рисунок 6 – Схема нагружения линейного пружинного элемента
Системе координат элемента или локальной системе координат противопоставляется глобальная система координат. Глобальная система координат представляет собой систему, в которой рассматривается поведение всей конструкции. Под
всей конструкцией понимается сборка множества конечных элементов (в данном
случае нескольких пружин), для которой требуется определить ее реакцию на условия нагружения. Далее рассматриваются случаи, когда локальная и глобальная система координат, по существу, является одной и той же системой, за исключением
положения начала координат вдоль единственной оси. Однако в двух- и трехмерных
случаях различия между ними могут быть довольно значительными, что требует математического приведения локальных систем координат к общему базису. Общим
базисом является глобальная система координат.
На рисунке 6а точки 1 и 2 соответствуют узлам элемента, перемещения которых обозначены противоположно направленными векторами u1 и u2. Если пружина
уравновешена, то известные узловые перемещения определяют полное удлинение
или укорочение пружины. Такой подход справедлив в том случае, когда силы прикладываются к элементу только в его узлах. На рассматриваемой схеме эти силы обозначены векторами f1 и f2, также направленными в противоположных направлениях.
Предположив, что перемещения обоих узлов равны нулю, когда пружина не
деформирована, результирующую деформацию пружины можно выразить формулой:
u 2 u1
(2)
Тогда, как показано на рисунке 6б, результирующая осевая сила в пружине
будет определяться следующим выражением:
16
f k k u 2 u1
(3)
Отсюда следует, что равновесие пружины будет обеспечиваться, когда силы в
ее узлах определяются уравнениями:
f1 k u 2 u1
(4)
f 2 k u 2 u1
(5)
Данные уравнения (4) и (5) могут быть записаны в матричной форме как:
k
k
k u1 f1
k u 2 f 2
(6)
Что в упрощенной форме записи для рассматриваемого случая имеет вид:
[k e ]{u} {f }
(7)
где [ke] – матрица жесткости элемента в локальной системе координат (системе координат элемента);
{u} – вектор узловых перемещений;
{f} – вектор узловых сил, приложенных к элементу.
Уравнение (6) показывает, что матрица жесткости линейного пружинного
элемента имеет размерность 22. Это объясняется тем, что элемент характеризуется
двумя узловыми перемещениями (или двумя степенями свободы), которые являются
зависимыми, т.к. пружина является непрерывной и упругой. Кроме того, матрица
является симметричной.
Решение уравнения (6) при заданных узловых нагрузках сводится к определению неизвестных узловых перемещений, и формально может быть записано как:
f
u 1
1 1
[k e ]
u 2
f 2
(8)
17
где [k]–1 – обратная матрица жесткости пружинного элемента.
Однако такая обратная матрица не может существовать, т.к. ее определитель
равен нулю, откуда следует, что матрица жесткости элемента является вырожденной. Физический смысл вырожденности матрицы иллюстрируется рисунком 6а, где
не показаны связи, ограничивающие перемещение элемента, т.е. пружина в данном
случае не связана с каким-либо физическим объектом, который препятствовал бы
перемещениям обоих узлов элемента.
В отсутствие связей вычислить перемещения узлов по отдельности не представляется возможным. Вместо этого может быть найдена только разность этих перемещений, поскольку эта разность выражает удлинение или укорочение пружинного элемента, обладающего упругостью. Правильная формулировка конечного элемента должна разрешать постоянные значения полевой переменной. В рассматриваемом примере это означает возможность движения твердого тела. Эта возможность
имеет место, как для единичного элемента, так и для системы элементов. Для единичного элемента, не имеющего связей, произвольные нагрузки, заданные в каждом
его узле, не только вызывают осевую деформацию пружины, но и накладывают на
нее ускорение в соответствии со вторым законом Ньютона. Следовательно, элемент
не только деформируется, но еще и перемещается в пространстве. В случае системы
пружин общий отклик системы является таким, что оба узла конкретного элемента
перемещаются на одинаковую величину без упругой деформации пружины и, следовательно, без упругой силы в пружине.
2.1.3 Системы пружин
Описанная процедура вывода матрицы жесткости пружинного элемента основана на определении условий его равновесия. Такая же процедура, осуществляемая
через запись уравнения равновесия для каждого узла, может быть использована и
для систем взаимосвязанных пружинных элементов. Однако вместо того, чтобы составлять расчетные схемы для каждого узла и выводить на их основе уравнения
равновесия, можно более эффективно получить эти уравнения путем рассмотрения
вклада, который вносит сила, действующая в каждом элементе, в уравнения для
18
каждого узла. Данный процесс называется «сборкой», поскольку здесь для вывода
системы уравнений используется объединение отдельных жестких компонентов.
Сборка характеристик отдельных элементов в систему уравнений может быть показана на простейшем примере системы из двух линейных пружин, соединенных так,
как изображено на рисунке 7.
Рисунок 7 – Схема нагружения линейного пружинного элемента
Для обобщения предполагается, что пружины имеют различные коэффициенты жесткости k1 и k2, и определяются узлами 1, 2 и 3. При этом узел 2 является общим для пружин и соответствует их физическому соединению. Перемещения узлов
в глобальной системе координат обозначены как U1, U2 и U3, где верхний регистр
указывает на то, что данные величины являются глобальными или системными перемещениями в противоположность перемещениям узлов отдельных элементов.
Приложенные нагрузки аналогично обозначены как F1, F2 и F3.
Предположив, что система двух пружинных элементов уравновешена, можно
составить силовые схемы для отдельных пружин (рисунок 8) и выразить их условия
равновесия с использованием уравнений (9) и (10).
k1
k
1
(1 )
(1 )
k1
u1
f1
(1 ) (1 )
k1
u 2
f 2
(9)
k2
k
2
( 2)
( 2)
k 2
u1
f 2
( 2) ( 2) ,
k 2
u 2
f 3
(10)
где верхний индекс обозначает номер элемента.
19
Рисунок 8 – Силовые схемы отдельных элементов
Чтобы начать сборку уравнений равновесия, описывающих поведение системы двух пружин, необходимо сформулировать условия совместности перемещений,
которые соотносят перемещения элементов с перемещениями системы. Эти условия
в данном случае имеют вид:
u1(1) U1
u(21) U 2
u1( 2) U 2
u(22) U 3
(11)
Условия совместности отражают тот физический факт, что пружины, будучи
соединенными в узле 2, остаются соединенными в этом узле и после деформации,
откуда следует, что перемещения обеих пружин в этом узле одинаковы. Таким образом, в узлах обеспечивается непрерывность перемещений при переходе от элемента
к элементу.
Подстановка условий (11) в уравнения (9) и (10) дает уравнения вида:
k1
k
1
(1 )
k 1 U1
f1
(1 )
k 1 U 2
f 2
(12)
k2
k
2
( 2)
k 2 U 2
f 2
( 2)
k 2 U 3
f 3
(13)
Данная запись уравнений наглядно показывает, что элементы физически соединены в узле 2 и имеют одинаковое перемещение U2 в этом узле. Для комбинации
20
этих уравнений сначала необходимо выполнить расширение, присутствующих в них
матриц, которое приводит к уравнениям следующего вида:
k1
k
1
0
0 U1 f1(1)
0 U 2 f 2(1)
0
0 0
(14)
0 0 0
k 2 U 2 f 2( 2)
( 2)
k 2
U 3 f 3
(15)
k1
k1
0
0
0
0 k
2
0 k 2
Формально такая запись означает, что элемент 1 не связан с узлом 3, а элемент
2 не связан с узлом 1.
Сложение уравнений (14) и (15) приводит к уравнению:
k1
k
1
0
k1
k1 k 2
k2
0 U 1 f1(1)
k 2 U 2 f 2(1) f 2( 2 )
( 2)
k 2
U 3 f 3
(16)
Рассмотрение силовых схем для трех узлов (рисунки 8в, г и д) показывает, что
условия их равновесия имеют вид:
f1(1) F1
f 2(1) f 2( 2) F2
f 3( 2) F3
(17)
Подстановка этих условий в уравнение (16) приводит к окончательному уравнению, описывающему поведение системы пружин:
k1
k
1
0
k1
k1 k 2
k2
0 U 1 F1
k 2 U 2 F2
k 2
U 3 F3
(18)
Первая матрица в этом уравнении представляет собой матрицу жесткости [K]
системы, которая:
21
‐ является линейной, как и в случае всех линейных систем, рассматриваемых
в ортогональной системе координат;
‐ является вырожденной в силу отсутствия связей, препятствующих перемещению тел системы;
‐ является простой суперпозицией матриц жесткости отдельных элементов.
2.2 Стержневой или ферменный конечный элемент
Несмотря на то, что рассмотренный пружинный элемент дает представление
об основах конечно-элементного анализа, его применимость в этом анализе весьма
ограничена. На практике этот элемент используется для моделирования линейных
пружин, имеющих место в конструкциях различных узлов и механизмов машин, а
также для моделирования упругих опор сложных систем.
Более широкое применение в анализе конструкций находит похожий тип элемента, представляющий собой упругий стержень, который воспринимает только
осевые нагрузки. Этот элемент, обычно называемый стержневым элементом, полезен, в частности, при анализе плоских и пространственных рам и ферм. Формулировка конечно-элементных характеристик упругого стержневого элемента основана
на следующих допущениях:
‐ стержень является геометрически прямолинейным;
‐ материал стержня подчиняется закону Гука;
‐ силы прикладываются к стержню только на его концах;
‐ стержень воспринимает только осевое нагружение; изгиб, кручение и сдвиг
элементом не воспринимаются.
Последнее допущение, хотя и является ограничением элемента, не делает его
непрактичным, и справедливо для тех случаев, когда стержень соединяется с другими конструкционными элементами через вращательный (2D) или сферический (3D)
шарнир. Первое и последнее допущение совместно показывают, что стержневой
элемент, по сути, является одномерным элементом, откуда следует возможность выражения упругого перемещения любой точки вдоль оси стержня посредством единственной независимой переменной.
22
На рисунке 9 изображен упругий стержень длиной L, с которым связана одноосная система координат x с началом в левом конце стержня. Данная система является системой координат элемента. Если обозначить осевое перемещение любой
точки вдоль оси стержня как u(x), тогда перемещения узлов 1 и 2 на концах стержня
соответственно определятся как u1 = u(0) и u2 = u(L). Это позволяет приближенно
описать непрерывную полевую переменную u(x) посредством двух узловых перемещений u1 и u2, для чего необходимо ввести некоторые интерполяционные функции (функции формы) N1(x) и N2(x), такие что:
u(x) N1 (x)u1 N 2 (x)u 2
(19)
Рисунок 9 – Стержневой (ферменный) конечный элемент
Уравнение (19) позволяет сформулировать граничные условия, которым
должны удовлетворять интерполяционные функции в виде:
N1 (0) 1 N1 (L) 0
(20)
N 2 (0) 0 N 2 (L) 1
(21)
Приведенные условия дают простейшие интерполяционные функции в виде
следующих полиномов:
N1 (x) a 0 a1x
(22)
N 2 ( x ) b 0 b1 x
(23)
23
Коэффициенты полиномов определяются через подстановку в них граничных
условий (20) и (21). Их выражение имеет вид:
1
L
(24)
1
L
(25)
a 0 1 a1
b 0 0 b1
Следовательно, интерполяционные функции запишутся как:
N1 ( x) 1
N 2 ( x)
x
L
x
L
(26)
(27)
Тогда непрерывная функция перемещения примет вид:
x
x
u( x) 1 u1 u 2
L
L
(28)
При известном выражении полевой переменной через узловые перемещения
дальнейшая задача сводится к определению взаимосвязи между узловыми перемещениями и приложенными силами для формулировки матрицы жесткости стержневого элемента. Из курса сопротивления материалов известно, что деформация
упругого стержня длиной L с постоянным поперечным сечением A, вызванная осевой силой P, определяется формулой:
δ u 2 u1
PL
,
AE
(29)
где E – модуль упругости материала стержня.
24
Для того чтобы элемент находился в равновесии, силы f1 и f2, действующие в
его узлах, должны быть равны по величине и противоположны по направлению. Тогда из уравнения (29) следует, что эти силы будут определяться как:
f1
f2
AE
u 2 u1
L
AE
u 2 u1
L
(30)
(31)
Запись уравнений (30) и (31) в матричной форме дает уравнение равновесия
стержневого элемента, которое имеет следующий вид:
AE 1 1 u1 f1
L 1 1 u 2 f 2
(32)
Отсюда следует, что матрица жесткости стержневого элемента будет иметь
свое выражение в виде:
1 1
L 1 1
k e AE
(33)
Как и в случае с линейной пружиной матрица жесткости стержневого элемента является симметричной, вырожденной, и имеет размерность 22 в силу наличия у
элемента двух степеней свободы (двух узловых перемещений). Нужно заметить, что
приведенная матрица выражена в системе координат элемента, которая в данном
случае является одномерной.
Рассмотренный стержневой элемент преимущественно применяется для моделирования различных двух- и трехмерных ферменных конструкций. Под ферменной
конструкцией (фермой) понимается механическая система, состоящая из произвольного числа прямолинейных упругих элементов, которые подвержены только осевым
нагрузкам. При моделировании такой конструкции приведенная формулировка бу25
дет справедливой, если все элементы системы представляются стержневыми конечными элементами, которые соединяются друг с другом вращательными шарнирами
так, что каждый элемент может свободно вращаться в этом шарнире.
Взаимодействие элементов рассматривается в глобальной системе координат,
представляющей собой систему отсчета, в которой выражаются перемещения конструкции, и обычно выбираемой исходя из удобства рассмотрения общей геометрии. Например, при рассмотрении плоской консольной фермы, изображенной на рисунке 10а, логично выбрать координатные оси X и Y параллельно преобладающим
геометрическим «осям» конструкции, как это показано на рисунке. Элементы этой
фермы соединяются друг с другом вращательными шарнирами, один из которых для
примера вынесен отдельно на рисунке 10б. Его рассмотрение показывает, что он
представляет собой физическое соединение пяти элементных узлов в одном глобальном узле, и при этом направление осей некоторых элементов не совпадает с
направлением глобальной оси X.
Рисунок 10 – Двухмерная ферма, состоящая из десяти элементов
Различная геометрическая ориентация элементов в соединении определяет
следующие требования, накладываемые на конечно-элементную модель:
‐ перемещения узла каждого соединенного элемента в элементной системе
координат (локальные перемещения) должны быть такими же, как и перемещения
общего узла в глобальной системе координат;
‐ физические характеристики каждого элемента должны быть приведены к
глобальной системе координат;
‐ отдельные, подлежащие определению параметры элементов (для стержневых элементов – осевые напряжения), должны рассчитываться по завершению ре26
шения задачи в глобальной системе координат путем обратного преобразования полученных результатов в локальные системы координат элементов.
Расчет подобных конструкций, так же, как и в случае с системами пружин
сводится к сборке глобальной матрицы жесткости и последующему определению
глобальных перемещений. Рисунок 10б, изображающий соединение нескольких
элементов, показывает, что геометрия соединения определяет зависимости между
локальными и глобальными перемещениями, а также вклад каждого отдельного
элемента в общую жесткость конструкции. Для определения перемещений необходимо построить матрицу жесткости каждого элемента и преобразовать из локальной
системы координат в глобальную систему координат, после чего скомпоновать полученные матрицы в глобальную матрицу жесткости с учетом связности элементов.
Например, очевидно, что элементы 3 и 7 на рисунке 10б должны влиять только на жесткость в направлении глобальной оси X, элементы 6 и 7 – на жесткость в
направлении обеих осей X и Y, а элемент 4 – только на жесткость в направлении оси
Y. Процедуры преобразования элементов и сборки матрицы жесткости являются достаточно трудоемкими и поэтому выходят за рамки настоящего пособия. Подробности их реализации могут быть найдены в соответствующей литературе [4].
2.3 Балочный конечный элемент
Использование стержневых конечных элементов имеет несомненную пользу
при анализе напряженного состояния множества простых конструкций. Однако
ограничение этого типа элементов, заключающееся в неспособности передавать изгибающие воздействия, препятствует их применению для моделирования конструкций с неподвижными соединениями (сварными, заклепочными, винтовыми и т.д.),
которые более распространены на практике. По этой причине для моделирования
подобных конструкций используется другой тип конечного элемента, а именно балочный конечный элемент. Он представляет собой линейный (одномерный) элемент, способный работать как на растяжение-сжатие, так и на изгиб с кручением.
Особенности формулировки этого элемента можно рассмотреть на примере, изображенном на рисунке 11.
27
Рисунок 11 – Балочный конечный элемент: а) простая балка на двух опорах,
нагруженная распределенной нагрузкой; б) изогнутый балочный элемент;
в) правило знаков для поперечных сил и изгибающих моментов
В основу формулировки балочного элемента положена элементарная теория
балок, для которой справедливы следующие допущения:
‐ балка нагружена только в направлении оси y (в двухмерной постановке задачи);
‐ деформации балки малы по сравнению с ее характеристическими размерами;
‐ материал балки является линейно упругим, изотропным и однородным;
‐ балка имеет призматическое поперечное сечение, ось симметрии которого
находится в плоскости изгиба балки.
Кроме того, данная формулировка предполагает выполнение следующих дополнительных условий:
‐ элемент имеет конечную длину и определяется двумя узлами, по одному на
каждом конце;
‐ соединение элемента с другими элементами осуществляется только в его
узлах;
‐ нагружение элемента осуществляется только в его узлах.
Поскольку основной предпосылкой формулировки конечного элемента является выражение непрерывно изменяющейся полевой переменной посредством конечного числа значений, вычисленных в узлах элемента, постольку для балочного
элемента искомой полевой переменной является поперечное смещение (x)
28
нейтральной плоскости балки от своего исходного положения (в отсутствие деформаций). Как показано на рисунке 12 поперечная деформация балки вдоль ее длины
не может быть адекватно описана только через перемещения конечных точек. Эти
перемещения могут быть одинаковы по величине, в то время как характер деформации может быть совершенно разным. Отсюда следует, что формулировка балочного
элемента кроме перемещений конечных точек также должна учитывать наклон (поворот) балки. Учет поворотов узлов, помимо устранения возможной неоднозначности перемещений, гарантирует совместность элементов, тем самым исключая физически неприемлемые разрывы, пример которого изображен на рисунке 12в.
Рисунок 12 – Проблемы формулировки балочного элемента: а) и б) балочные
элементы, имеющие одинаковые перемещения концов, но различный характер
деформации; в) физически недопустимый разрыв в соединительном узле
В связи с этим узловые переменные балочного элемента должны включать не
только перемещения его узлов, но и их повороты, как показано на рисунке 13. На
данном рисунке обозначены узлы 1 и 2 элемента, расположенные на его концах, и
связанные с ними узловые переменные, которыми являются поперечные перемещения 1 и 2 и повороты 1 и 2.
Рисунок 13 – Узловые переменные балочного элемента
29
Тогда функцию перемещений элемента можно представить в виде:
(x) f (1 , 2 , 1 , 2 )
(34)
Ее граничные условия будут иметь вид:
( x1 ) 1 , ( x 2 ) 2
(35)
d
d
2
1 ,
dx x2
dx x1
(36)
Дальнейший вывод функции формы элемента предполагает выбор системы
координат таким образом, что x1 = 0 и x2 = L. Такой выбор не является обязательным, но позволяет упростить алгебраическое представление функции.
С учетом приведенных граничных условий и одномерной природы задачи (в
отношении независимой переменной) можно предположить существование функции
перемещений в следующей полиномиальной форме:
ν(x) a0 a1x a 2 x 2 a 3 x 3
(37)
Подстановка граничных условий (35) и (36) в уравнение (37) дает четыре
уравнения, позволяющих определить коэффициенты полинома:
ν(0) ν1 a0
(38)
ν(L) ν 2 a0 a1L a 2L2 a 3L3
(39)
dν
θ1 a1
dx 0
(40)
dν
θ 2 a1 2a 2L 3a 3L2
dx L
(41)
30
Совместное решение этих уравнений дает следующие выражения для коэффициентов полинома:
a2
a3
a 0 ν1
(42)
a1 θ1
(43)
3
1
(
ν
ν
)
( 2θ1 θ 2 )
2
1
L
L2
2
1
(
ν
ν
)
(θ1 θ 2 )
1
2
L3
L2
(44)
(45)
Подстановка выражений (42-45) в уравнение (37) дает окончательную запись
функции перемещений в виде:
3x 2 2x 3
2x 2 x 3
ν( x) 1 2 3 ν1 x
2 θ1
L
L
L
L
3x
x
2x
x
2 3 ν 2 2 θ 2
L
L
L
L
2
3
3
2
(46)
Более удобную форму записи данной функции дает использование безразмерной координаты , такой что:
ξ
x
L
(47)
При ее использовании функция приобретает вид:
ν(x) (1 3ξ 2 2ξ 3 ) ν1 L (ξ 2ξ 2 ξ 3 ) θ1 (3ξ 2 2ξ 3 ) ν 2 Lξ 2 (ξ 1) θ2 (48)
Такая форма записи лучше поддается интегрированию при выводе матрицы
жесткости элемента.
31
Матрица жесткости балочного элемента выводится на основе теоремы Кастильяно и в двухмерной формулировке имеет вид:
k 11
k
21
[k e ]
k 31
k 41
k 12
k 13
k 22
k 23
k 32
k 33
k 42
k 43
k 14
k 24
k 34
k 44
(49)
Коэффициенты этой матрицы вычисляются следующим образом:
k mn k nm
EI z
L3
1
0
d 2Nm d 2Nn
dξ 2
dξ 2
dξ m, n 1 4 ,
(50)
где E – модуль упругости материала балки, МПа;
Iz – момент инерции сечения балки относительно оси z, мм4;
L – длина балочного элемента, мм;
Nm,n – интерполяционные функции, описывающие изменение соответствующей узловой переменной.
С учетом формулы (50) матрица жесткости балочного элемента приобретает
вид:
6L 12 6L
12
2
6L 2L2
EI z 6L 4L
[k e ] 3
L 12 6L 12 6L
2
2
6L 2L 6L 4L
(51)
Соответственно уравнение статического равновесия балочного конечного
элемента (в двухмерной постановке задачи), записанное в матричной форме, будет
иметь вид:
6L 12 6L 1 F1
12
6L 4L2 6L 2L2 M
EI z
1 1
3
L 12 6L 12 6L 2 F2
2
6L 4L2 2 M 2
6L 2L
(52)
32
Правая часть этого уравнения представляет собой вектор нагрузок, действующих в узлах, где знаки сил F и моментов M определяются направлением соответствующих перемещений. В данном случае предполагается, что перемещения имеют
положительное направление. Однако, как изображено на рисунках 14а и 14б, общепринятое в теории балок правило знаков для поперечных сил и моментов таково, что:
F1 V1
M M
1
2
F
V
2
2
M 2 M 2
(53)
В данном выражении вектор слева содержит положительные силы и моменты,
справедливые для конечно-элементной формулировки элемента. Вектор справа содержит соответствующие силы и моменты с учетом их знака согласно теории балок.
Рисунок 14 – Силовые факторы, действующие на балку: а) положительно
направленные узловые нагрузки; б) положительно направленные нагрузки,
принятые в сопротивлении материалов; в) эпюры поперечной силы и изгибающего
момента
Если два балочных элемента имеют общий узел, то внутренние поперечные
силы в этом узле будут равны по величине и противоположны по направлению до
33
тех пор, пока к этому узлу не будет приложена внешняя сила, при наличии которой
сумма внутренних сил должна равняться приложенной нагрузке. Аналогичная картина наблюдается и для изгибающих моментов. В соединении двух элементов (в
общем узле) внутренние изгибающие моменты будут равны по величине и противоположны по направлению до тех пор, пока к этому узлу не будет приложен сосредоточенный момент. В этом случае внутренние моменты суммируются с приложенным моментом.
Данные замечания иллюстрируются рисунком 14в, где показана двухопорная
балка, нагруженная сосредоточенной силой и сосредоточенным моментом, которые
действуют посередине балки. На эпюре поперечной силы, построенной для этой
балки, виден «скачок» в точке приложения силы, величина которого равна величине
приложенной силы. Аналогичным образом эпюра изгибающего момента показывает
«скачок» величины момента равный приложенному сосредоточенному моменту.
Поэтому, если балка будет разбита на два конечных элемента с общим узлом в середине балки, тогда равнодействующая сила в узле будет равна приложенной силе, а
равнодействующий момент в узле – приложенному внешнему моменту.
Главным недостатком балочного элемента в приведенной формулировке является необходимость приложения нагрузок, действующих поперек продольной оси
балки, что ограничивает область применения элемента. Соответственно, если элемент будет сформулирован так, чтобы также поддерживать осевое нагружение, его
область применения может быть существенно расширена. Такой элемент изображен
на рисунке 15, на котором кроме поперечных смещений и поворотов обозначены
осевые перемещения в узлах. Поэтому элемент допускает как осевое, так и поперечное нагружение.
Рисунок 15 – Узловые перемещения балочного элемента, обладающего осевой
жесткостью
34
Необходимо заметить, что включение в формулировку элемента осевой
нагрузки приводит к появлению дополнительных эффектов. Если осевая нагрузка
будет сжимающей, то элемент под ее воздействием может терять устойчивость
(продольно изгибаться). Если осевая нагрузка будет растягивающей и иметь достаточно большую величину, то может возникнуть явление, известное как упрочнение.
Данное явление можно сравнить с натягом гитарной струны, когда с увеличением
натяжения струна становится более устойчивой к движению в направлении перпендикулярном оси струны.
Как показано на рисунке 16 для балки, одновременно нагруженной поперечной и осевой силой, влияние осевой силы на изгиб непосредственно связано с деформацией балки, поскольку величина деформации в конкретной точке становится
плечом момента осевой силы. В случае небольшой упругой деформации дополнительный изгибающий момент, связанный с осевой нагрузкой пренебрежимо мал.
Однако в большинстве программ конечно-элементного анализа продольный изгиб и
упрочнение доступны в виде опции балочных элементов при их использовании в
расчетах. При дальнейшем изложении материала предполагается, что осевые
нагрузки не оказывают влияние на изгиб балки.
Рисунок 16 – Влияние осевой силы на изгиб балки
В этом случае необходимая матрица жесткости элемента размерностью 6×6
может быть получена простой суперпозицией матрицы жесткости стержневого элемента (33) и матрицы жесткости балочного элемента (51) и будет иметь следующий
вид:
35
AE
L
AE
L
0
[k e ]
0
0
0
AE
L
AE
L
0
0
0
0
0
0
0
0
0
0
12EI z
L3
6EL z
L2
12EI z
L3
6EL z
L2
6EL z
L2
4EL z
L
6EL z
L2
2EL z
L
12EI z
L3
6EL z
L2
12EI z
L3
6EL z
L2
0
6EL z
L2
2EL z
L
6EL z
L2
4EL z
L
0
(54)
Добавление балочному элементу способности воспринимать осевую нагрузку
устраняет ограничение этого элемента, заключающееся в необходимости его линейного выравнивания, и позволяет использовать элемент в анализе плоских рамных
конструкций, которые могут работать на изгиб. При таком применении должна учитываться ориентация элемента в глобальной системе координат, как и в случае со
стержневым элементом, используемым в фермах. Учет этой ориентации осуществляется за счет угла наклона элемента к оси X глобальной системы координат (рисунок 17), который используется для вычисления матрицы преобразований R, приводящей перемещения в глобальной системе координат к перемещениям в локальной системе координат.
Рисунок 17 – Влияние осевой силы на изгиб балки
При этом матрица преобразований может быть выражена как:
36
cos sin
sin cos
0
0
[R ]
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
cos sin 0
sin cos 0
0
0
1
0
0
(55)
Использование этой матрицы позволяет записать уравнение равновесия балочного элемента, произвольно ориентированного в глобальной системе координат,
в следующем виде:
[R]T [k e ][R]{U} {F} ,
(56)
где {U} – вектор перемещений элемента в глобальной системе координат;
{F} – вектор нагрузок, приложенных к элементу в глобальной системе координат.
Процедура сборки системы уравнений для конечно-элементной модели, построенной из нескольких балочных элементов, выполняется идентично процедурам,
рассмотренным для других типов элементов.
Дальнейшим расширением балочного конечного элемента является его трехмерная формулировка, при использовании которой элемент обладает осевой, изгибной и крутильной жесткостью. Это достигается путем построения соответствующей
матрицы жесткости элемента размерностью 1212, которая в сокращенной форме
может быть записана как:
[0]
[0]
[0]
[k axial]
[0]
[
k
]
[
0
]
[
0
]
bending
xy
,
[k e ]
[0]
[0]
[k bending ]xz
[0]
[0]
[0]
[k torsion ]
[0]
(57)
где [kaxial] – элементы матрицы, определяющие осевую жесткость балочного
элемента и выражаемые формулой (33);
[kbending]xy и [kbending]xz – элементы матрицы, определяющие изгибную жест37
кость балочного элемента соответственно в плоскостях xy и xz, и выражаемые формулой (51);
[ktorsion] – элементы матрицы, определяющие крутильную жесткость балочного
элемента, которые выражаются как:
[k torsion ]
JG 1 1
,
L 1 1
(58)
где J – полярный момент инерции сечения балки, мм 4;
G – модуль сдвига материала балки, МПа;
L – длина балки, мм.
Поскольку в матрице жесткости появляются элементы, определяющие крутильную жесткость, постольку векторы перемещений и нагрузок в уравнении равновесия балочного элемента должны быть дополнены соответствующими узловыми
переменными и нагрузками, изображенными на рисунке 18.
Рисунок 18 – Влияние осевой силы на изгиб балки
При использовании трехмерной формулировки балочного элемента для моделирования пространственных конструкций учет произвольной ориентации элемента
осуществляется так же, как и в двухмерном случае при помощи углов наклона элемента к осям глобальной системы координат.
2.4 Пластинчатый конечный элемент
Рассмотренные стержневые и балочные конечные элементы применяются для
моделирования сплошных тел в форме относительно длинных и тонких конструкци38
онных компонентов, у которых один из трех характерных размеров значительно
больше двух других. Однако эти элементы не пригодны для моделирования сплошных тел, имеющих сопоставимые характерные размеры, что требует использования
других типов конечных элементов.
Наиболее простым из них является пластинчатый конечный элемент, применяемый для анализа плоского напряженного состояния конструкционных объектов.
Данный элемент имеет форму плоского трех- или четырехугольника и характеризуется узлами, расположенными в их вершинах. Плоское напряженное состояние объекта предполагает возможность двух независимых перемещений любой его точки,
осуществляемых в плоскости объекта. Отсюда следует, что пластинчатый элемент
обладает двумя степенями свободы в каждом узле.
Очевидно, что простейшим вариантом этого элемента является треугольник,
вершины которого определяют положение трех узлов элемента. Практически любой
плоский конструкционный объект может быть представлен в виде сетки таких треугольных конечных элементов, хотя отдельные элементы в сетке могут отличаться
своими линейными и угловыми размерами. Данная способность определила то, что
этот тип элемента стал первым типом конечного элемента, применяемым для дискретизации сплошных сред.
Наличие у элемента только трех узлов предопределяет линейный характер его
функций формы и упрощает математическую формулировку элемента, что является
его дополнительным достоинством. С другой стороны линейные функции формы
приводят к невозможности изменения величины относительной деформации и
напряжения в пределах элемента. Данное обстоятельство является недостатком элемента, когда он используется для моделирования конструкций, в которых возможны
резкие колебания напряжений и деформаций. В этом случае для получения точного
распределения напряжений в конструкции необходимо использовать большое число
треугольных элементов. Большое число элементов означает большое число решаемых уравнений и соответственно большие вычислительные затраты.
Вывод математической формулировки треугольного конечного элемента возможен на основе схемы, изображенной на рисунке 19. Здесь показан трехузловой
39
конечный элемент с шестью степенями свободы, произвольно расположенный относительно осей X и Y глобальной системы координат. Локальная система координат
для данного элемента не требуется. Вывод матрицы жесткости элемента осуществляется непосредственно в глобальной системе координат, что исключает необходимость преобразования локальных и глобальных координат [2].
Рисунок 19 – Влияние осевой силы на изгиб балки
Так как перемещения в плоскости элемента являются независимыми друг от
друга, функции перемещений могут быть записаны как:
u(x, y ) N1 (x, y )q1 N 2 (x, y )q 3 N 3 (x, y )q 5
(59)
(x, y ) N1 (x, y )q 2 N 2 (x, y )q 4 N 3 (x, y )q 6
(60)
Как видно из записи функций для элемента требуются только три функции
формы (N1, N2, N3). Это объяснятся тем, что две функции перемещений различаются
только узловыми перемещениями: осуществляемыми в направлении оси X (q1, q3,
q5) для функции u(x,y) и осуществляемыми в направлении оси Y (q2, q4, q6) для
функции (x,y).
Функции формы являются полиномами с независимыми переменными в виде
глобальных координат x и y. Каждая функция соотносится с тремя степенями свободы, по одной степени на каждый узел, и поэтому является трехчленом. Они могут
быть записаны как:
40
N1 (x, y ) C11 C21x C31y
(61)
N 2 (x, y ) C12 C22x C32y
(62)
N 3 (x, y ) C13 C23x C33y
(63)
Их запись в матричной форме имеет вид:
N 1 C11 C 21 C 31 1
N 2 C12 C 22 C 32 x
N C
3 13 C 23 C 33 y
(64)
Эти функции могут быть визуализированы как треугольные плоскости, расположенные поверх элемента так, что две их точки совпадают с узлами элемента, а
третья имеет единичное смещение в направлении нормали элемента (рисунок 20).
Рисунок 20 – Влияние осевой силы на изгиб балки
Функции перемещений являются линейной комбинацией функций формы,
следовательно, они также являются линейными функциями глобальных координат x
и y. Они могут быть изображены как треугольные плоскости, расположенные поверх треугольного конечного элемента так, что ординаты их точек, отсчитываемые
от каждого узла равны соответствующим узловым перемещениям qi.
На рисунке 21 показана функция перемещений, построенная для трех смежных элементов (e1, e2 и e3) в плосконапряженной конструкции. На рисунке видно,
41
что эти перемещения являются непрерывными не только в узлах, но и вдоль кромок
между узлами. Также здесь видно, что наклоны плоскостей для каждого элемента
остаются постоянными как к глобальной оси X, так и к оси Y. Эти наклоны непосредственно связаны с величиной относительной деформации в элементах. Поэтому
деформация, а, следовательно, и напряжение в пределах каждого элемента имеет
постоянную величину. Величины деформаций и напряжений будут различными для
различных элементов, а их изменение при переходе от элемента к элементу будет
осуществляться скачкообразно на границах элементов.
Рисунок 21 – Влияние осевой силы на изгиб балки
Постоянные коэффициенты функций формы (Cij) могут быть определены на
основе решения матричного уравнения следующего вида:
C11 C21 C31 1 x1
C
12 C22 C32 1 x 2
C13 C23 C33 1 x 3
y1
y 2
y 3
1
(65)
При обращении матрицы в правой части уравнения методом присоединенной
матрицы уравнение приобретает вид:
x 2y 3 x 3y 2
(y y )
3
2
x3 x2
[C]
( x1 y 3 x 3 y 1 ) x1 y 2 x 2 y 1
y 3 y1
( y 2 y 1 )
( x 3 x1 )
x 2 x1
1 x1 y 1
1 x2
y2
1 x3
y3
(66)
42
Уравнение (66) показывает, что постоянные коэффициенты функций формы
треугольного элемента полностью определяются глобальными координатами его узлов: (x1, y1), (x2, y2) и (x3, y3). Знаменатель в уравнении (66), которым является определитель матрицы в правой части уравнения (65) может быть интерпретирован как
удвоенная площадь треугольного элемента, т.е.:
1 x1
2A e 1 x 2
1 x3
y1
y2
y3
(67)
Подстановка уравнений (66) и (67) в уравнение (64) дает выражения для
функций формы треугольного конечного элемента в следующем виде:
N 1 ( x, y )
1
[(x 2 y 3 x 3 y 2 ) ( y 3 y 2 )x ( x 3 x 2 )y ]
2A e
(68)
N 2 ( x, y )
1
[(x 3 y 1 x1 y 3 ) ( y 1 y 3 )x ( x1 x 3 )y ]
2A e
(69)
N 3 ( x, y )
1
[(x1 y 2 x 2 y 1 ) ( y 2 y 1 )x ( x 2 x1 )y ]
2A e
(70)
На основе полученных функций формы матрица жесткости треугольного конечного элемента формулируется как:
[K ] V [B T ][E][B]dV ,
(71)
где [B] – матрица деформаций, представляющая собой массив производных
функций формы, дифференцируемых в соответствии с существующими
зависимостями относительных деформаций;
[E] – матрица упругих констант материала, связывающая векторы напряжений и относительных деформаций.
43
Для трехузлового конечного элемента, находящегося в плоском напряженном
состоянии, матрица деформаций выражается как:
N 1
x
[B ] 0
N
1
y
0
N 1
y
N 1
x
N 2
x
0
N 2
y
0
N 2
y
N 2
x
N 3
x
0
N 3
y
0
N 3
y
N 3
x
(72)
Подстановка в уравнение (72) уравнений (68-70) и последующее дифференцирование дают:
0
(y 1 y 3 )
0
(y 2 y 1 )
0
(y 3 y 2 )
1
[B ]
0
x3 x2
0
x1 x 3
0
x 2 x1 (73)
2A e
x 3 x 2
(y 3 y 2 )
x1 x 3
(y 1 y 3 )
x 2 x1
( y 2 y 1 )
Матрица упругих констант для плоского напряженного состояния имеет вид:
0
1
E
[ E]
1
0 ,
2
1
0 0 1
2
(74)
где E – модуль упругости используемого материала, МПа;
– коэффициент Пуассона используемого материала.
Как видно матрицы [B] и [E] определяются только постоянными коэффициентами, поэтому интегрирование уравнения (71) приводит к уравнению вида:
[K ] [BT ][E][B]Aet ,
(75)
где Ae – площадь треугольного элемента, мм2;
t – некоторая постоянная толщина элемента, мм.
44
Нагрузки, воспринимаемые данным типом элемента, должны задаваться исключительно в плоскости элемента и могут быть сосредоточенными в точке элемента, распределенными по площади элемента и распределенными вдоль кромки элемента.
Сосредоточенная нагрузка, приложенная в узле, учитывается так же, как описано ранее, путем вставки ее компонентов x и y в соответствующие положения вектора нагрузки. Сосредоточенная нагрузка, приложенная внутри элемента, и распределенная нагрузка учитываются путем их приведения к вектору эквивалентных узловых нагрузок, действующих по каждой степени свободы элемента. В случае, если
нагрузки являются постоянными, то такое приведение не составляет большого труда, однако в случае переменных нагрузок это представляет собой проблему, решение которой возможно на основе использования так называемых натуральных координат элемента.
Натуральные координаты определяют положение точки внутри элемента на
основе ключевых геометрических атрибутов элемента. Использование этих координат дает возможность более удобного вычисления интеграла по площади элемента.
На рисунке 22 показана точка внутри треугольника, положение которой определяется длинами перпендикуляров, опущенных из этой точки на каждую сторону треугольника. Длины перпендикуляров, опущенных на стороны треугольника, противолежащие узлам 1, 2 и 3, соответственно обозначены как s1, s2 и s3. Тогда, если аналогичным способом обозначить высоты треугольника как h1, h2 и h3, то можно
определить следующие безразмерные локальные координаты точки:
1
s
s1
s
, 2 2 , 3 3
h1
h2
h3
(76)
Значение каждой из этих локальных координат будет изменяться от нуля до
единицы. При их использовании положение любой точки в пределах треугольника
может быть задано как ( 1, 2, 3). Тогда узел 1 будет иметь координаты (1, 0, 0),
узел 2 – (0, 1, 0) и узел 3 – (0, 0, 1).
45
Рисунок 22 – Локальные треугольные координаты
Еще одной интерпретацией этих координат выступают отношения площадей
треугольников. Если принять длину перпендикуляра s1 за высоту треугольника, основанием которого является сторона 2-3 элемента (L23), то отношение площади этого треугольника к общей площади треугольного элемента определит координату 1, то есть:
A1 0,5s1L 23 s1
1
A e 0,5h1L 23 h1
(77)
Аналогично второй треугольник внутри треугольного элемента может быть
определен высотой s2 и основанием в виде стороны 1-3. Отношение площади этого
треугольника к общей площади элемента будет координатой 2. Отношение третьего
треугольника с высотой s3 и основанием 1-2 дает третью координату 3. Эти локальные
или натуральные координаты ( 1, 2, 3), часто называемые координатами площади,
иллюстрируются рисунком 23.
Рисунок 23 – Треугольные координаты площади
46
Очевидно, что эти координаты являются зависимыми и подчиняются условию:
1 2 3
A1 A 2 A 3
1
Ae
(78)
Связь между локальными треугольными координатами и глобальными декартовыми координатами выражаются уравнениями:
x 1x1 2 x 2 3 x 3
(79)
y 1y 1 2 y 2 3 y 3
(80)
Система уравнений (79-80) может быть записана в матричной форме как:
1
x
1
y 1
1
x2
y2
1 1 1
x 3 2 x
y 3 3 y
(81)
Решение уравнения (81) относительно вектора {} может быть записано в следующем виде:
1 С11 С 21 С 31 1 N 1 ( x, y )
2 С12 С 22 С 32 x N 2 ( x, y )
С
3 13 С 23 С 33 y N 3 ( x, y )
(82)
Отсюда следует, что для трехузлового треугольного элемента координаты
площади точно совпадают с его функциями формы. Достоинства координат площади становятся очевидными при разработке функций формы для элементов более высокого порядка (с большим числом узлов) и интегрировании различных видов интерполяционных функций.
Нагрузки, действующие на трехузловой треугольный элемент, могут быть сосредоточенными (точечными), распределенными по его ребрам и распределенными
47
по его площади. Эти нагрузки при проведении конечно-элементного анализа описываются соответствующими векторами.
В случае сосредоточенной нагрузки, действующей в пределах элемента в точке с координатами (x0,y0), вектор нагрузок будет иметь следующее выражение:
e}
{F}{PL
Ni
0
Nj
[N]T {f p }
0
N k
0
0
N i
0
Nj
0
Nk
N i ( x 0 , y 0 )f px
N ( x , y )f
i 0 0 py
f px N j ( x 0 , y 0 )f px
f N ( x , y )f
py j 0 0 py
N k ( x 0 , y 0 )f px
N
(
x
,
y
)
f
k 0 0 py
(83)
где fpx и fpy – компоненты сосредоточенной нагрузки, действующие в направлении осей x и y соответственно, Н.
В случае нагрузки, распределенной по ребру элемента, вектор нагрузок будет
выражаться как:
Ni
0
Nj
{F}{se } S( e ) [N]T {s}dS S( e )
0
N k
0
0
N i
0 s x
dS
N j s y
0
Nk
(84)
где S(e) – длина участка распределения нагрузки, м;
sx и sy – компоненты распределенной по ребру нагрузки, действующие в
направлении осей x и y соответственно, Н.
Например, при распределении нагрузки вдоль ребра ij треугольного элемента
вычисление интеграла в формуле (84) даст вектор нагрузок в виде:
{F}{se}
s
2
tl ij
x
sy
sx sy
0 0
T
(85)
48
где t – постоянная толщина элемента, м;
lij – длина ребра ij, м.
В случае нагрузки, распределенной по площади элемента (объемной
нагрузки), соответствующий вектор вычисляется как:
Ni
0
Nj
{F}{be } V( e ) [N]T {b}dV A( e )
0
N k
0
b x
0
b
N i
y
0 b x
tA( e ) b x
tdxdy
N j b y
3 b y
b x
0
Nk
b y
(86)
где bx и by – компоненты распределенной по площади нагрузки, действующие
в направлении осей x и y соответственно, Н.
2.5 Объемный тетраэдрический элемент
Многие конструкции имеют геометрические, механические или нагрузочные
особенности, которые невозможно учесть при моделировании с использованием
стержневых, балочных или пластинчатых элементов. Единственной альтернативой в
данном случае является проведение полностью трехмерного (3D) анализа, основанного на общей пространственной теории упругости.
Примерами таких ситуаций может служить моделирование сплошных тел неправильной геометрической формы, исследование тел с разнородными свойствами
материала или сложным характером нагружения. На рисунке 24 показаны некоторые примеры типовых конструкций, требующих проведения полноценного трехмерного анализа.
Несмотря на кажущуюся сложность, конечно-элементный анализ трехмерных
тел не привносит каких-либо концептуальных проблем. Трехмерная теория упругости, используемая в данном случае, является простым расширением двумерного
случая, и шаги, выполняемые в трехмерном конечно-элементном анализе, идентич49
ным шагам в двумерном анализе. Однако введение в анализ третьего измерения
приводит к увеличению трудоемкости вычислений, а также пре- и постпроцессирования. Поэтому трехмерный анализ не следует использовать в тех случаях, когда
возможно решение рассматриваемой задачи в более простой двумерной постановке.
К сожалению, во многих практических случаях это невозможно, что обусловливает
необходимость трехмерного анализа [8].
Рисунок 24 – Конструкции, требующие проведения трехмерного анализа
Для дискретизации трехмерного пространства могут использоваться различные типы конечных элементов, наиболее простым из которых является четырехузловой тетраэдрический элемент. Типовой тетраэдрический элемент с узлами
i, j, k и l показан на рисунке 25. Обозначение его узлов может быть и другим, но всегда должно подчиняться следующим принятым правилам:
‐ любой из узлов элемента может быть выбран в качестве первого узла, от которого отсчитываются остальные узлы;
‐ последующие узлы отсчитываются от первого узла в направлении обхода
против часовой стрелки.
50
Рисунок 25 – Четырехузловой тетраэдрический элемент
Поле перемещений в пределах рассматриваемого элемента интерполируется
следующей зависимостью:
u N 1u 1
u v N1 v1
w N w
1 1
N 2u 2
N2v2
N2w 2
N 3u 3
N3v3
N3w4
N 4u 4
4
N 4 v 4 N i a (i e ) Na ( e ) ,
i 1
N 4 w 4
(87)
где N, a(e), Ni, ai(e) – соответственно матрица функций формы и вектор перемещений элемента и матрица функций формы и вектор перемещений i-го
узла, которые выражаются как:
N [ N1
N2
a (e)
N3
N i
N 4 ] ; N i 0
0
a1( e )
ui
(e )
a 2
(e)
(e ) ; a i v i
a 3
w
i
a ( e )
4
0
Ni
0
0
0
N i
(88)
(89)
51
Так же, как и во всех предыдущих случаях, для всех компонентов перемещения применима одинаковая интерполяция, откуда следует, что функции формы для
каждого из трех перемещений в узлах элемента будут иметь одинаковый вид.
Аналитическое выражение функций формы Ni может быть получено тем же
путем, что и для пластинчатого треугольного элемента. Наличие четвертого узла в
данном случае задает поле линейных перемещений в трехмерном пространстве.
Например, если рассмотреть перемещение u, то в глобальных координатах его можно представить следующей формулой:
u 1 2 x 3 y 4 z
(90)
Коэффициенты i в уравнении (90) могут быть найдены подстановкой в него
узловых координат с последующим приравниванием перемещений их узловым значениям, то есть:
u1 1 2 x1 3 y 1 4 z 1
u 2 1 2 x 2 3 y 2 4 z 2
(91)
u 3 1 2 x 3 3 y 3 4 z 3
u 4 1 2 x 4 3 y 4 4 z 4
Подстановка найденных значений i в уравнение (90) после перестановки слагаемых дает уравнение вида:
4
1
(a i b i x c i y d i z )u i ,
(e)
6
V
i 1
u
(92)
где V(e) – объем элемента, а параметры ai, bi, ci и di определяются формулами:
xj
a i det x k
xl
yj
yk
yl
zj
1 yj
z k ; b i det 1 y k
zl
1 yl
zj
zk
zl
(93)
52
xj
c i det x k
xl
xj
1 zj
1 z k ; d i det x k
xl
1 zl
yj
yk
yl
1
1
1
Сопоставление уравнений (92) и (87) дает выражение функции формы в следующем виде:
Ni
1
(a i b i x c i y d i z )
6V ( e )
(94)
Графическое представление функций формы для трехмерных элементов затруднительно, поскольку они являются функциями трех независимых переменных.
Однако нужно заметить, что выражение функции Ni над гранью элемента точно
совпадает с функцией формы двумерного элемента, соответствующего этой грани.
Таким образом, функции формы для четырехузлового тетраэдра над каждой его
гранью приобретают вид, который идентичен функциям для треугольного элемента,
показанным на рисунке 20.
Функции формы для тетраэдрических элементов также могут быть записаны
через объемные и/или натуральные координаты. Чтобы получить представление об
этих координатах следует рассмотреть четырехузловой тетраэдрический элемент
ijkl, внутри которого произвольно размещена некоторая точка P (рисунок 26).
Рисунок 26 – Объемные координаты в тетраэдре
Тогда каждая объемная координата Li точки P будет определяться как отношение объема тетраэдра, образованного этой точкой и гранью элемента, противоле53
жащей узлу i, к полному объему элемента, то есть:
V ( Pjkl )
Li
; i 1, 2, 3, 4
V (e)
(95)
Очевидно, что объемные координаты удовлетворяют условию:
L1 L 2 L 3 L 4 1
(96)
Объемные координаты могут быть использованы для линейной интерполяции
геометрии элемента посредством уравнений следующего вида:
4
4
4
i 1
i 1
i 1
x Li xi ; y Li y i ; z Li z i
(97)
Совместное рассмотрение уравнений (96) и (97) позволяет получить следующее выражение:
Li
1
(a i b i x c i y d i z ) ,
6V ( e )
(98)
где параметры ai, bi, ci и di выражаются формулами (93).
Следовательно, для четырехузлового тетраэдра объемные координаты совпадают с его функциями формы.
Натуральные координаты , и определяют нормализованный прямоугольный тетраэдр (рисунок 27), взаимно перпендикулярные ребра которого имеют единичную длину, а грани удовлетворяют условиям:
0; 0 ; 0; 1 0
(99)
При выражении в натуральных координатах функции формы линейного тетраэдра приобретают вид:
N1 1 ; N 2 ; N 3 ; N 4
(100)
54
Рисунок 27 – Натуральная система координат , и в тетраэдре
Взаимосвязь между натуральными и объемными координатами очевидна и
имеет вид:
L1 1 ; L 2 ; L 3 ; L 4
(101)
Матрица жесткости тетраэдрического элемента так же, как и в случае с треугольным элементом может быть выражена формулой (71). Однако входящие в нее
матрицы будут иметь другой вид. Так матрица деформаций [B] для четырехузлового
тетраэдрического элемента будет выглядеть как:
b 1 0 0 b 2 0 0 b 3 0 0 b 4 0 0
0 c
0
0
c
0
0
c
0
0
c
0
1
2
3
4
0 0 d1 0 0 d 2 0 0 d 3 0 0 d 4
1
[B ]
,
6V ( e ) c 1 b 1 0 c 2 b 2 0 c 3 b 3 0 c 4 b 4 0
0 d 1 c1 0 d 2 c 2 0 d 3 c 3 0 d 4 c 4
d
0
b
d
0
b
d
0
b
d
0
b
1
2
2
3
3
4
4
1
(102)
где bi, ci и di – параметры функции формы Ni в уравнении (94).
Матрица упругих констант [E] элемента (для изотропного материала) будет
выглядеть как:
55
1
1 2
1 2
E
[ E]
1 1 2
0
0
0
1 2
1
1 2
1 2
0
0
0
0
0
0
1 2
0
0
0
1 2
1
0
0
0
1 2
0
1/ 2 0
0
0
0 1/ 2 0
0
0
0 1 / 2
(103)
Нагрузки, которые способен воспринимать тетраэдрический элемент могут
быть сосредоточенными (точечными), распределенными по его граням и распределенными по всему объему элемента. При этом сосредоточенная нагрузка может задаваться в точке, принадлежащей только внешней грани элемента, а нагрузка, распределенная по грани, может задаваться только в том случае, когда эта грань является внешней.
Соответствующие векторы нагрузок в зависимости от их типа формируется
так же, как и для треугольного пластинчатого элемента, но с учетом наличия третьего измерения. Их выражение для сосредоточенной (в точке с координатами
(x0,y0,z0)), распределенной по грани (ijk) и распределенной по объему нагрузки имеет вид (слева направо):
e)
{F }(PL
b x
N i ( x 0 , y 0 , z 0 )f px
N is x
b
N ( x , y , z )f
N s
i
0
0
0
py
i
y
y
b z
N i ( x 0 , y 0 , z 0 )f pz
N is z
N
(
x
,
y
,
z
)
f
N
s
j
0
0
0
px
j
x
b x
b y
N j ( x 0 , y 0 , z 0 )f py
N js y
N j ( x 0 , y 0 , z 0 )f pz
N js z
4 b z
(e )
(e )
{F }s
dA ; {F }b ( e )
N ( x , y , z )f ;
A ijk N s
b
V
x
k 0 0 0 px
k x
b y
N k ( x 0 , y 0 , z 0 )f py
N k s y
b
N ( x , y , z )f
N s
k
0
0
0
pz
k
z
z
0
b x
0
b
0
0
y
b z
0
0
(104)
56
2.6 Контрольные вопросы
1 Что характеризует матрица жесткости конечного элемента?
2 Что понимается под локальной и глобальной системой координат при выводе уравнений равновесия конечных элементов?
3 Чем характеризуется матрица жесткости линейного пружинного элемента?
4 Каким образом осуществляется сборка уравнений для системы из двух линейных пружин?
5 Чем характеризуется результирующая матрица жесткости системы конечных элементов?
6 На каких допущениях основана формулировка конечно-элементных характеристик упругого стержневого элемента?
7 Каким образом выводятся интерполяционные функции (функции формы)
для линейного стержневого элемента?
8 Каким образом выводится уравнение равновесия для линейного стержневого элемента?
9 Чем характеризуется матрица жесткости линейного стержневого элемента?
10 В чем заключаются особенности расчета ферменных конструкции с использованием стержневых элементов?
11 Какие допущения положены в основу формулировки балочного конечного
элемента?
12 Как производится вывод функции перемещений для балочного конечного
элемента?
13 Что собой представляет матрица жесткости балочного конечного элемента?
14 Какой вид имеет матричная запись уравнения статического равновесия балочного конечного элемента в двухмерной постановке задачи?
15 К чему приводит включение в формулировку балочного конечного элемента осевой нагрузки?
16 Что собой представляет матрица жесткости балочного элемента, способного воспринимать осевую нагрузку?
57
17 В чем заключаются особенности расчета плоских систем балочных элементов?
18 Что собой представляет матрица жесткости балочного элемента, обладающего осевой, изгибной и крутильной жесткостью?
19 Чем характеризуется пластинчатый конечный элемент?
20 Какой вид имеют функции формы для линейного треугольного элемента?
21 Каким образом выводится матрица жесткости линейного треугольного
элемента?
22 Что собой представляют натуральные координаты треугольного элемента?
23 Каким образом для треугольного элемента выражается вектор сосредоточенной нагрузки?
24 Каким образом для треугольного элемента выражается вектор нагрузки,
распределенной по его ребру?
25 Каким образом для треугольного элемента выражается вектор нагрузки,
распределенной по его площади?
26 В каких случаях анализа необходимо использовать трехмерные конечные
элементы?
27 Какое выражение имеют функции формы для четырехузлового тетраэдрического элемента?
28 Что собой представляют объемные координаты четырехузлового тетраэдрического элемента?
29 Что собой представляют натуральные координаты четырехузлового тетраэдрического элемента?
30 Каким образом для тетраэдрического элемента выражается вектор сосредоточенной нагрузки?
31 Каким образом для тетраэдрического элемента выражается вектор нагрузки, распределенной по его грани?
32 Каким образом для тетраэдрического элемента выражается вектор нагрузки, распределенной по его объему?
58
3 Конечно-элементная дискретизация
3.1 Дискретная модель решаемой задачи
Использование конечно-элементных процедур предполагает наличие дискретной модели решаемой задачи, представленной в численной форме. Типовое описание такой задачи может содержать [1]:
- скалярные параметры (число узлов, число элементов и т.д.);
- свойства материала;
- координаты узловых точек;
- матрицу связности конечных элементов;
- матрицы типов элементов и материалов элементов;
- матрицы для описания граничных условий;
- матрицы для описания распределенных и сосредоточенных нагрузок;
- температурное поле.
Например, простейшая конечно-элементная модель, изображенная на рисунке 28,
может быть описана следующим образом:
Рисунок 28 – Дискретная модель, состоящая из двух конечных элементов
1) скалярные параметры:
- число узлов равно 6;
- число элементов равно 2;
- число связей равно 5;
- число нагрузок равно 2;
2) свойства материала:
59
- модуль упругости равен 2105 МПа;
- коэффициент Пуассона равен 0,3;
3) координаты узлов (x1, y1, x2, y2 и т. д.):
- координаты первого узла (0, 0);
- координаты второго узла (0, 1);
- координаты третьего узла (1, 0);
- координаты четвертого узла (1, 1);
- координаты пятого узла (2, 0);
- координаты шестого узла (2, 1);
4) матрица связности элементов (в направлении обхода против часовой стрелки):
- первый элемент – 1 3 4 2;
- второй элемент – 3 5 6 4;
5) связи (узел, направление: x = 1; y = 2):
- первая связь – 1 1;
- вторая связь – 2 1;
- третья связь – 1 2;
- четвертая связь – 3 2;
- пятая связь – 5 2;
6) узловые нагрузки (узел, направление, величина):
- первая нагрузка – 5 1 0,5;
- вторая нагрузка – 6 1 0.5.
Данный простой пример показывает, что конечно-элементная модель может
быть закодирована вручную, однако на практике такой подход неприемлем, и для
создания конечно-элементных моделей объектов сложной формы используются различные автоматические генераторы сетки.
3.2 Генерация конечно-элементной сетки
Множество конечных элементов в модели принято называть конечноэлементной сеткой (далее просто сеткой). Сетка является дискретным представлени-
60
ем геометрии физического объекта в параметрах его геометрии G, топологии T и
связанных атрибутов A, что можно выразить в следующем виде:
M {G, T, A}
(105)
При этом геометрия характеризуется координатами узлов, топология – типами
элементов и их связностью, а атрибуты – цветом, заданными нагрузками, граничными условиями и т.д.
Конечно-элементные модели, используемые на практике, могут содержать десятки и даже сотни тысяч степеней свободы. Для таких моделей создать необходимую сетку вручную невозможно, и поэтому здесь используются различные методы
автоматизированной генерации сетки при помощи так называемых сеточных генераторов. Сеточный генератор представляет собой специальную компьютерную программу, которая автоматизирует разбиение области решения на множество подобластей – конечных элементов.
Сетка, создаваемая таким генератором, в идеале, должна отвечать ряду требований, к которым относятся:
- общность (применимость к широкому диапазону геометрий и топологий);
- автоматизация (минимальное участие пользователя);
- правильность (в отношении топологической совместимости и геометрической идентичности);
- точность (точная детализация);
- сходимость (гарантированная сходимость построения):
- качество (гарантированное качество);
- инвариантность (по отношению к жестким формам движения моделируемого тела);
- гибкость управления плотностью сетки (однородная или плавно изменяющаяся сетка);
- устойчивость (надежность);
- компактность (в отношении хранения в памяти компьютера);
61
- эффективность (скорость вычислений);
- линейная сложность вычислений.
Одновременное выполнение всех этих требований является крайне затруднительным, в связи с чем при автоматической генерации сетки всегда приходится искать некоторый компромисс.
Сетки можно классифицировать по различным признакам, а именно:
- по размерности элементов в сетках они могут быть одномерные (1D), двумерные (2D) и трехмерные (3D);
- по типу используемых элементов сетки могут быть треугольные, тетраэдрические, четырехугольные, гексаэдрические, смешанные и т.д.;
- по плотности сеток они могут быть однородными и плавно изменяющимися;
- по топологии сетки могут быть структурированными и неструктурированными.
Методы генерации сетки можно разделить на:
1) ручные и полуавтоматические, применимые к областям простой геометрической формы (обычно в двумерном пространстве), которые включают:
а) методы перебора (добавление элементов сетки осуществляется пользователем вручную);
б) явные методы (вращение, выдавливание);
2) методы отображения (параметризации) из параметрического пространства в
физическое пространство, которые включают:
а) методы явного отображения – методы алгебраической интерполяции;
б) методы неявного отображения – методы решения уравнений в частных производных;
3) методы декомпозиции, к которым относятся:
а) методы блочной декомпозиции (мультиблочный метод);
б) методы пространственной декомпозиции (метод квадрантного/октантного
дерева);
4) конструктивные методы, применимые к объектам с произвольной геометрией и топологией, которые включают:
62
а) метод создания элементов – метод продвигаемого фронта;
б) метод вставки точки – метод триангуляции Делоне.
3.3 Структурированные и неструктурированные сетки
Структурированные сетки (рисунок 29) имеют следующие отличительные
особенности:
- все внутренние узлы сетки топологически подобны, т.е. каждый узел внутри
сетки окружен одинаковым количеством элементов;
- направления внутри сетки могут быть легко определены путем ее соотнесения с криволинейной системой координат;
- возможность незамедлительного определения ближайших соседних узлов
для любого из узлов сетки.
Рисунок 29 – Структурированная сетка
Неструктурированные сетки (рисунок 30) отличаются тем, что:
- количество элементов, окружающих внутренние узлы сетки может быть
различным;
- элементы и узлы нумеруются в определенной последовательности;
- возможность получения информации о соседних узлах обеспечивается за
счет сохранения информации о принадлежности узлов каждому элементу;
- определение направлений сетки не представляется возможным.
Различия между структурированными и неструктурированными сетками
обычно распространяются и на форму образующих их элементов: в двумерных
63
структурированных сетках обычно используются четырехугольники, в то время как
в неструктурированных сетках используются треугольники. В трехмерном пространстве аналогичными формами элементов являются гексаэдры, т.е. топологические кубы и тетраэдры. Однако использование элементов различной формы для
структурированных и неструктурированных сеток не является критичным, поскольку существует возможность преобразования формы между треугольниками и четырехугольниками и тетраэдрами и гексаэдрами.
Рисунок 30 – Неструктурированная сетка
Структурированные сетки характеризуются простотой и вычислительной эффективностью. Они требуют существенно меньше памяти компьютера – примерно в
три раза меньше, чем неструктурированные сетки с тем же числом элементов. Кроме того, они позволяют экономить время вычислений за счет более простого доступа к соседним узлам.
В то же время построение структурированной сетки для областей сложной
геометрической формы может быть затруднительным либо вообще невозможным, в
связи с чем приходится прибегать к полуавтоматическому мультиблочному методу
генерации сетки. К тому же структурированная сетка может требовать намного
больше элементов, чем неструктурированная сетка при моделировании одной и той
же задачи, т.к. ее элементы не способны резко изменяться в размерах.
Достоинствами неструктурированных сеток являются: гибкость дискретизации областей сложной геометрической формы, возможность быстрого перехода от
малых к большим элементам и относительная простота детализации (уточнения). Их
64
недостатками является ограниченное число применимых вычислительных алгоритмов и большие вычислительные затраты.
3.4 Методы построения структурированных сеток
Концепция мультиблочной или просто блочной структурированной сетки
предполагает разбиение области сложной геометрической формы на некоторое число подобластей более простой формы, называемых блоками, внутри которых генерируется структурированная сетка. При этом разбиение на блоки, которые обычно
имеют четырехугольную форму, осуществляется вручную, а генерация внутри них
сетки осуществляется автоматически, например методом явного или неявного отображения. Пример построения мультиблочной сетки приведен на рисунке 31.
Рисунок 31 – Этапы построения мультиблочной сетки: а) исходная область;
б) блоки; в) мультиблочная структурированная сетка
Методы отображения, используемые для построения структурированной сетки, основаны на отображении прямоугольного (треугольного) шаблона сетки, заданного в логическом (параметрическом) пространстве в виде единичного квадрата
(треугольника) на четырехугольную или треугольную физическую область с криволинейными границами. Данное отображение может быть представлено как топологическое искажение квадрата (треугольника) для приведения его в соответствие рассматриваемой физической области. Для этого границы физической области предварительно описываются аналитическими функциями, аппроксимируются полиномами либо параболическими или гиперболическими уравнениями в частных производных.
65
В качестве примера построения сетки методом отображения можно рассмотреть четырехугольную область с криволинейными границами f1, f2, g1, g2, изображенную на рисунке 32. Если ввести в нее нормализованные параметрические координаты u и v, соответственно изменяющиеся вдоль границ f1 и f2 и вдоль границ g1 и
g2, то границы области в одном направлении можно выразить функциями f1(u) и
f2(u), а в другом направлении – функциями g1(v) и g2(v).
Рисунок 32 – Отображение сетки в четырехугольной области
Использование методологии поверхностей Кунса позволяет связать эти границы между собой для получения в четырехугольной области прямоугольных координат произвольной точки P(u,v), соответствующей точке единичного квадрата в параметрическом пространстве. В свой простейшей форме эта связь имеет вид:
P(u, v) (1 v)f1 (u) vf 2 (u) (1 u)g1 ( v) ug 2 ( v) (1 u)(1 v)P(0,0)
(106)
(1 u)vP(0,1) uvP(1,1) u(1 v)P(1,0) ,
где 0 u 1 и 0 v 1.
Приведенная зависимость позволяет отобразить структурированную сетку,
наложенную на параметрическую область, в исходной физической области. При
этом значения параметрических координат u и v могут быть подобраны таким образом, что плотность ячеек сетки будет плавно изменяться в заданном направлении.
Аналогичным методом может быть выполнено построение сетки треугольных
элементов в треугольной криволинейной области, для чего используется соответ66
ствующая трилинейная интерполяционная функция.
В случае, если физическая область имеет более четырех сторон, то для генерации в ней структурированной сетки может быть использован метод конформного
отображения. Данный метод основан на возможности отображения сетки из многоугольной односвязной области на другую многоугольную область, имеющую одинаковое число вершин. Иллюстрацией этого метода служит рисунок 33.
Рисунок 33 – Построение сетки методом конформного отображения
Отображение сетки в трехмерной области осуществляется так же, как и для
четырехугольной плоской области, но в данном случае сопрягаются уравнения граничных поверхностей, а не уравнения кривых. При этом трехмерная область должна
быть ограничена шестью поверхностями и иметь одинаковую структуру сетки на
противолежащих поверхностях (рисунок 34).
Рисунок 34 – Отображение сетки в трехмерной области
67
Для генерации структурированной сетки также часто применяется метод заметания, основанный на том, что предварительно созданный одномерный или двухмерный образец сетки перемещается вдоль заданной траектории либо отображается
на заданные сечения с одинаковой топологией, как показано на рисунке 35. При
этом исходный образец сетки может иметь произвольную структуру, в связи с чем
генерируемая сетка может быть упорядоченной только в заданном направлении, т.е.
квазиструктурированной.
Рисунок 35 – Построение структурированной сетки методом заметания
3.5 Методы построения неструктурированных сеток
В общем случае, генерация структурированной сетки в произвольных областях сложной геометрической формы сложно поддается автоматизации, что заставляет прибегать к альтернативе в виде неструктурированной сетки. Такая сетка характеризуется большей гибкостью по отношению к сложной геометрии и лучшим
контролем плотности ее узлов. Основой различных методов генерации неструктурированной сетки является создание ее узлов и соответствующих связей между ними.
Обычно это достигается путем выполнения ряда следующих этапов, включающих в
себя:
- дискретизацию границ области, в которой создается сетка;
- указание функции распределения размеров элементов сетки;
- генерацию сетки в заданных границах области;
68
- оптимизацию элементов полученной сетки (опционально).
Дискретизация границ (которая представляет собой полигональную или полиэдральную аппроксимацию границ реальной области) может выполняться отдельно либо одновременно с созданием сетки. В последнем случае используемый метод
генерации сетки должен гарантировать целостность границ области.
Функция распределения размеров элементов может быть задана двумя путями,
а именно явно и неявно. При неявном задании размер элементов внутри области
может быть вычислен на основе интерполяции дискретизированных границ области
или путем интерполяции между соседними узлами, если доступно управляющее
пространство, в котором размер элемента задается при каждом узле. При явном задании используется некоторая функция f(x,y,z), определенная в границах всей
(трехмерной) области, которая может формулироваться аналитически для описания
закона распределения размеров элементов либо может задаваться пользователем в
табличном виде.
Оптимизация элементов связана с топологической и геометрической модификацией сетки для улучшения в качества автоматически сгенерированной сетки, что
необходимо в большинстве практических случаев.
Основными методами автоматической генерации неструктурированных сеток
являются метод пространственной декомпозиции, метод продвигаемого фронта и
метод триангуляции Делоне.
3.5.1 Методы пространственной декомпозиции
В этих методах для задания размеров элементов сетки используется древовидная иерархическая структура (квадрантное и октантное дерево в двух- и трехмерном
пространстве соответственно), которая одновременно служит пространством
окрестностей и управляющим пространством.
Их общий принцип основан на том, что рассматриваемая область сначала заключается в ограничивающий ее прямоугольник или прямоугольный параллелепипед (одна ячейка, корень). Затем область аппроксимируется несвязной суммой, ячеек переменного размера, представляющих разбиение области. Ячейки рекурсивно
69
подразделяются до тех пор, пока конечная ячейка не будет превышать желаемый
размер элемента (локальное значение функции распределения размеров). Каждая
конечная ячейка затем упрощается путем деления на треугольники или тетраэдры до
получения приемлемой конечно-элементной сетки в области (рисунок 36). Критерий
завершения генерации сетки может быть основан на кривизне элементов модели либо выводиться на основе адаптивной оценки погрешности разбиения.
Рисунок 36 – Построение сетки методом квадрантного дерева
Данные методы обычно реализуются непосредственно на основе заданной дискретизации границ области или, в более общем случае, путем генерации граничного
представления области с использованием систем геометрического моделирования.
Классическая схема метода квадрантного/октантного дерева включает в себя
следующие шаги:
1) инициализацию, включающую:
а) дискретизацию границ (или аналитическое описание границ);
б) определение функции распределения размеров, если это возможно;
2) декомпозицию дерева, включающую:
а) построение исходной ячейки, заключающей в себе рассматриваемую об70
ласть;
б) рекурсивное подразделение ячейки в соответствии с заданным критерием;
3) балансировку дерева, под которой понимается изменение ячеек таким образом, чтобы разница между соседними ячейками не превышала один уровень (так
называемое правило 2:1);
4) генерацию сетки в ячейках с использованием предопределенных образцов
во внутренних ячейках (рисунок 37) и местных связей в граничных ячейках;
Рисунок 37 – Базовые образцы сетки для двумерных (2D) ячеек
5) оптимизацию сетки, заключающуюся в ее топологической и геометрической модификации.
Достоинствами методов пространственной декомпозиции являются:
‐ высокая скорость генерации сеток;
‐ высокая устойчивость;
‐ приемлемое качество генерируемых сеток (отсутствие элементов «плохой»
формы, гарантированное качество для внутренних ячеек);
‐ гарантированная сходимость процесса генерации (при достаточно простых
граничных ячейках);
‐ гарантированная правильность за счет надлежащего использования шаблонов (образцов) сетки;
‐ невысокая вычислительная сложность;
‐ хорошее использование оперативной памяти компьютера.
К их недостаткам следует отнести:
‐ малую гибкость в управлении плотностью сетки (меньшую пригодность для
адаптивного анализа);
‐ плохое качество элементов в приграничных слоях сетки;
71
‐ отсутствие инвариантности по отношению к поворотам модели;
‐ невозможность полной совместимости с заданной граничной триангуляцией;
‐ сложность использования для генерации анизотропных сеток.
3.5.2 Метод продвигаемого фронта
Основная идея этого метода заключается в построении сетки элемент за элементом, начиная с некоторого исходного фронта (то есть граничной дискретизации
области в виде списка кромок для двумерного пространства и списка граней для
трехмерного пространства). Метод реализуется через создание в рассматриваемой
области новых точек (или использовании набора предварительно созданных точек)
и соединение этих точек с точками текущего фронта для формирования элементов
сетки. Благодаря этому пока еще не покрытое сеткой пространство постепенно
уменьшается, поскольку фронт перемещается через область.
Обобщенная схема классического метода продвигаемого фронта выглядит
следующим образом:
1) инициализация фронта путем определения граничных объектов области, которые могут быть отсортированы по заданному критерию;
2) определение функции распределения размеров элементов, которая может
быть построена на основе имеющихся входных данных;
3) выбор объекта соседнего с фронтом на основе заданного критерия, что влечет за собой:
‐ создание оптимальной точки P на основе объекта (рисунок 38);
‐ проверку наличия узла сетки (вершины V), подлежащего использованию
вместо точки P, и перенос вершины V в точку P при наличии такого узла;
‐ проверку пересечений элементов, их размеров и т.п. для проверки сделанного выбора;
‐ добавление нового элемента, соответствующего идентифицированной точки, обновление структуры данных сетки и обновление фронта.
4) повторение третьего шага до тех пор, пока фронт не обнулится;
5) оптимизация сетки (при необходимости).
72
Рисунок 38 – Размещение оптимальной точки (а) и выбор возможного кандидата для
оптимальной точки (б)
Пример построения неструктурированной сетки методом продвигаемого
фронта приведен на рисунке 39.
Рисунок 39 – Пример распространения фронта в двумерной области
К достоинствам метода продвигаемого фронта относятся:
‐ высокое качество сеток переменной плотности;
‐ высокое качество приграничных слоев элементов в сетках;
‐ гибкость управления плотностью сетки;
‐ гарантированная правильность сетки (при завершенном процессе ее генерации);
‐ соответствие заданной дискретизации границ;
‐ невысокая вычислительная сложность;
‐ теоретическая инвариантность по отношению к жестким формам перемещений физической области в пространстве;
73
‐ возможность генерации анизотропных сеток;
‐ хорошее использование оперативной памяти компьютера;
‐ применимость для адаптивного анализа (локальное перестроение сетки).
Недостатками метода являются:
‐ довольно низкая скорость генерации сетки;
‐ не гарантированная сходимость сетки в трехмерном пространстве, когда для
завершения сетки требуется вставка дополнительного узла, как, например, в простейшем трехмерном случае многогранника Шёнхардта;
‐ возможность генерации элементов «плохой» формы, например, плоских
тетраэдров, пример которых изображен на рисунке 40 (такие элементы удаляются
при оптимизации сетки);
‐ потребность в наличии дискретизации границ.
Рисунок 40 – Плоский тетраэдр, все вершины которого расположены вблизи
описанной окружности экватора
3.5.3 Методы триангуляции Делоне
Наиболее популярными методами генерации конечно-элементных сеток являются методы, основанные на триангуляции Делоне. Данная триангуляция максимизирует сумму наименьших углов во всех треугольниках (тетраэдрах) сетки, что
обеспечивает построение наилучшей сетки для заданного набора точек (отсутствие
«плохих» элементов). В ее основе лежит критерий, согласно которому любой узел
сетки не должен располагаться внутри окружности (или сферы), описанной вокруг
треугольного (или тетраэдрического) элемента, как это показано на рисунке 41. При
этом описанная окружность (сфера) определяется как окружность (сфера), проходящая через все вершины треугольника (тетраэдра).
74
Рисунок 41 – Иллюстрация критерия Делоне:
а) критерий выполняется, б) критерий не выполняется
Триангуляция Делоне осуществляется на основе набора точек или диаграммы
Вороного. Диаграмма Вороного состоит из N многоугольников Vi, центры которых
находятся в точках Pi, причем эти многоугольники представляют собой геометрическое место точек, для которых данная точка Pi является ближайшей. Каждый многоугольник Vi является выпуклым. Он ограничивается прямыми, проходящими через
середины отрезков, соединяющих точку Pi с ее соседями, и перпендикулярными
этим отрезкам. Многоугольники Вороного показаны на рисунке 42 пунктиром.
Рисунок 42 – Диаграмма Вороного и триангуляция Делоне на плоскости
Каждый многоугольник Вороного связан с одной определенной точкой. Построив диаграмму Вороного, можно перейти к созданию треугольных элементов,
соединяя вершины соседних многоугольников. Полученный таким образом набор
треугольников представляет собой триангуляцию Делоне.
Триангуляция Делоне может производиться непосредственно на наборе точек
75
с использованием алгоритма двухмерной триангуляции Ватсона-Боуайера без предварительного построения диаграммы Вороного. Согласно этому алгоритму, три точки, не лежащие на одной прямой, объединяются в треугольник, если окружность,
проведенная через эти точки (описанная окружность для будущего треугольника),
не захватывает никаких других точек.
Процедура триангуляции начинается с построения «суперструктуры», охватывающей все рассматриваемые точки. Суперструктурой обычно является треугольник
или прямоугольник, вершины которого временно заносятся в список точек, подлежащих триангуляции. Затем осуществляется перебор точек из их полного множества, и для каждой точки ищутся треугольники, такие, что описанная вокруг них
окружность захватывает данную точку. Эти треугольники, называемые пересеченными, удаляются и в дальнейшем не рассматриваются.
При этом удаленные треугольники неявно образуют некоторый многоугольник. Этот многоугольник используется для построения триангуляции путем соединения рассматриваемой точки с вершинами многоугольника. На завершающем этапе
треугольники, полученные соединением точек с вершинами суперструктуры, удаляются (рисунок 43).
Рисунок 43 – Пример триангуляции эллипса с одним внутренним узлом с
использованием алгоритма Ватсона-Боуайера
76
Обобщенную схему триангуляции Делоне можно представить в виде ряда этапов, к которым относятся:
1) инициализация, включающая:
‐ ввод граничных объектов;
‐ построение исходной триангуляции TB ячейки, ограничивающей область
(рисунок 44а);
2) вставка все граничных вершин в триангуляцию TB (рисунок 44б);
3) построение пустой сетки TE (без внутренних вершин), начиная с TB, включающее (рисунок 44б):
‐ восстановление утраченных граничных объектов (целостности границ);
‐ идентификацию связанных компонентов области.
4) создание поля точек и их вставка в область, т.е. улучшение триангуляции TE
(рисунок 44г);
5) оптимизация сетки (рисунок 44д).
Рисунок 44 – Этапы триангуляции Делоне
К достоинствам методов триангуляции Делоне относятся:
‐ развитая математическая база;
‐ высокое качество сеток с плавно изменяющимися размерами элементов;
‐ довольно высокая скорость построения сеток;
77
‐ гибкое управление плотностью сетки;
‐ гарантированная сходимость генерации сетки;
‐ невысокая вычислительная сложность;
‐ применимость для построения анизотропных сеток.
Среди недостатков рассматриваемых методов можно назвать:
‐ отсутствие гарантии правильности сетки (необходимо восстановление границ);
‐ возможность получения элементов «плохой» формы в фазе генерации сетки
(такие элементы удаляются в процессе оптимизации сетки);
‐ отсутствие инвариантности по отношению к поворотам области в пространстве;
‐ потребность в наличии дискретизации границ;
‐ несогласованность с заданной граничной дискретизацией.
3.6 Повышение качества сетки
Некоторые методы построения сеток не позволяют получить сетку, качество
которой отвечает требованиям конечно-элементного анализа. Здесь под качеством
сетки понимается ее способность обеспечивать эффективное решение конечноэлементных уравнений в соответствии с физикой моделируемого процесса и требуемой точностью. Качество сетки определяется геометрическими параметрами образующих ее элементов, которыми могут быть асимметрия (скошенность), соотношение сторон, деформация и отношение Якобианов. Эти параметры всегда оцениваются по отношению к идеальной форме элементов, которой для двухмерного пространства является равносторонний треугольник, а для трехмерного пространства –
правильный тетраэдр.
Для повышения качества сетки на практике используются различные подходы,
которые могут включать в себя:
‐ преобразование типов (геометрической формы) конечных элементов;
‐ изменение плотности и согласованности сетки;
‐ сглаживание сетки.
78
3.6.1 Преобразование типов элементов
Если сеточный генератор производит только один тип элементов, то полученные элементы могут при необходимости преобразовываться в другой тип. Например, четырехугольники и гексаэдры легко преобразуются в треугольники и тетраэдры близких размеров, и наоборот, треугольники и тетраэдры могут быть преобразованы в четырехугольники и гексаэдры, как показано на рисунке 45. Сетка треугольников может быть преобразована в сетку четырехугольников простым объединением пар соседних треугольников.
Рисунок 45 – Пример преобразования элементов
3.6.2 Плотность и согласованность сетки
Сетка должна учитывать возможность изменения размеров элементов при переходе от одного своего участка к другому. Большинство компьютерных программ
конечно-элементного анализа требуют согласованности сетки, когда смежные элементы связываются друг с другом целым ребром или целой гранью (рисунок 46).
Для сетки, образованной треугольными или тетраэдрическими элементами согласованность обеспечить довольно легко, в то время как для сетки из четырехугольных
или гексаэдрических элементов эта задача усложняется. В последнем случае для создания переходов от крупных элементов к более мелким используются два подхода,
иллюстрируемые рисунком 47.
79
Рисунок 46 – Пример согласованной (а) и несогласованной сетки (б)
Рисунок 47 – Переход между большими и малыми четырехугольными элементами:
а) с использованием треугольников; б) с использованием только четырехугольников
При уточнении сетки (локальном уменьшении размеров ее элементов) некоторые ее элементы подразделяются на более мелкие при сохранении размеров других
элементов. В связи с этим возникает проблема сохранения согласованности сетки
без искажения формы элементов. Для сетки из треугольных и четырехугольных
элементов эта проблема решается различными методами. В случае треугольных/тетраэдрических элементов используются три метода, к которым относятся:
‐ бисекция ребра;
‐ вставка точки;
‐ метод шаблонов.
Бисекция ребра. Бисекция ребра связана с половинным делением отдельных
ребер в существующей триангуляции. В результате два смежных треугольника, связанных общим ребром, подразделяются на два. Применительно к объемной сетке
любой тетраэдр, имеющий общее ребро, подразделяется аналогичным способом так,
как показано на рисунке 48. При этом деление осуществляется по наиболее длинному ребру треугольника или тетраэдра.
80
Рисунок 48 – Бисекция ребра в сетке тетраэдрических элементов
Вставка точки. Простым методом детализации сетки является вставка узла в
барицентр существующего элемента и подразделение с его помощью треугольника на
три элемента или тетраэдра на четыре элемента. Обычно этот метод не обеспечивает
хорошего качества элементов, особенно после выполнения нескольких итераций по
данной схеме. Для улучшения схемы может быть использована триангуляция Делоне,
при помощи которой удаляются локальные треугольники или тетраэдры, и осуществляется локальное перестроение сетки на основе критерия Делоне (рисунок 49).
Рисунок 49 – Пример детализации сетки через вставку точки A с использованием
критерия Делоне
Метод шаблонов. Под шаблоном понимается определенная декомпозиция
треугольников. Простым примером является декомпозиция единственного треугольника на четыре аналогичных треугольника путем создания новых узлов на ребрах исходного треугольника (рисунок 50). Эквивалентный шаблон для тетраэдра
81
обеспечивает его декомпозицию на восемь тетраэдров с подразделением каждой
грани исходного тетраэдра на четыре треугольника. Для сохранения согласованности сетки также могут использоваться дополнительные шаблоны, основанные на
числе ребер, подлежащих делению.
Рисунок 50 – Пример детализации треугольной сетки в элементах A и B с
использованием шаблонов
В случае структурированной сетки четырехугольных или гексаэдрических
элементов методы вставки точки и бисекции ребра не применимы. Основные методы, используемые для улучшения таких элементов, связаны с их декомпозицией на
основе предопределенных шаблонов. В настоящее время существуют различные алгоритмы и наборы шаблонов для декомпозиции элементов, пример которой приведен на рисунке 51. Для обеспечения согласованности сетки некоторые схемы улучшения четырехугольников и шестигранников часто требуют введения в сетку треугольников или элементов альтернативной формы, включая тетраэдры и пентаэдры.
Рисунок 51 – Пример детализации четырехугольной сетки в элементах A и B с
использованием шаблонов
82
3.6.3 Сглаживание сетки
Часто элементы, произведенные автоматическим генератором сетки, не отвечают тем или иным параметрам их качества. В этом случае для улучшения сетки
(исправления некачественных элементов) применяются методы сглаживания. Существуют две основные группы методов сглаживания: сглаживание методом Лапласа и
оптимизационное сглаживание. Сглаживание Лапласа в своей простейшей форме
сводится к перемещению узла «проблемного» элемента в барицентр (центр тяжести) многоугольника, образованного узлами, связанными с перемещаемым узлом
(рисунок 52).
Рисунок 52 – Сглаживание Лапласа
Данный метод широко распространен благодаря своей простоте и эффективности. Однако данный метод не гарантирует качественное улучшение сетки из-за
возможности получения инвертированных элементов (рисунок 53). По этой причине
в настоящее время разработаны различные модификации метода сглаживания
Лапласа, позволяющие предотвратить этот недостаток. К ним относятся интеллектуальное сглаживание Лапласа и сглаживание на основе взвешенных центров описанных окружностей (вариационное сглаживание).
Рисунок 53 – Пример инвертированного элемента в сетке
83
Итерационный алгоритм интеллектуального сглаживания Лапласа, также
называемого сглаживанием Лапласа с ограничениями, основан на перемещении узлов в зависимости от положения соседних узлов. В ходе реализации алгоритма сначала формируется набор элементов вокруг данного узла и производится оценка качества этого набора по качеству элемента наихудшей формы. Затем вычисляется новое возможное положение узла как среднее арифметическое соседних узлов. После
этого снова оценивается качество рассматриваемого набора элементов с использованием вычисленного нового положения. Если качество элементов в наборе при
этом не ухудшается, то новое положение принимается и осуществляется фактическое перемещение узла, в противном случае новое положение отвергается и узел
возвращается в предыдущее положение.
При вариационном сглаживании новое возможное положение перемещаемого
узла, определяется как средневзвешенное арифметическое значение центров окружностей, описанных вокруг элементов, которым принадлежит рассматриваемый узел
(рисунок 54). При этом веса центров являются функцией геометрических размеров
элементов. Очевидно, что данный алгоритм применим только к сетке треугольных
или тетраэдрических элементов.
Рисунок 54 – Пример сглаживания на основе взвешенных центров описанных
окружностей
84
Оптимизационное сглаживание основано на оптимальной триангуляции Делоне, под которой понимается триангуляция, обеспечивающая минимальную погрешность интерполяции заданной функции, для всех возможных вариантов триангуляции с одинаковым числом вершин. При ее использовании осуществляется равномерное распределение длин ребер элементов на основе аппроксимируемой функции.
3.7 Дискретизация по времени
В нестационарных процессах физические величины помимо пространственной
зависимости также имеют зависимость от времени. При этом различают два типа задач, связанных с изменениями во времени: процессы переноса и вибрационные процессы [11]. Примерами соответствующих процессов могут быть вихревые дорожки,
которые наблюдаются при обтекании жидкостью или газом протяжённых цилиндрических тел (рисунок 55а) и вибрации механических конструкций (рисунок 55б).
Рисунок 55 – Примеры нестационарных процессов:
а) вихревая дорожка; б) колебания консольной балки
В то время как уравнения, описывающие нестационарные процессы переноса
включают только первые производные по времени, в уравнениях вибрационных процессов также присутствуют вторые производные. В первом случае такие уравнения
называются параболическими, а во втором – гиперболическими.
Для вывода этих уравнений сначала выполняется пространственная дискретизация рассматриваемой области, т.е. строится конечно-элементная сетка. Далее выполняется собственно дискретизация по времени, т.е. дискретизация полученных
обыкновенных дифференциальных уравнений.
Для этого весь рассматриваемый интервал времени [t0, T] сначала разбивается
на шаги tn (обычно неравной величины), таких что:
85
t n1 t n t n , n 0, 1, 2...
(107)
В соответствии с принципом причинности решение в момент времени tn+1
может зависеть только от предыдущих временных точек tn, tn-1, … Поскольку время
в этом отношении является односторонней координатой, постольку решение для
момента времени tn+1 определяется как функция граничных условий и результатов
решения на предыдущих шагах. Следовательно, дискретизация по времени всегда
основана на экстраполяции. Начиная с заданных начальных условий в момент времени t0, неизвестная переменная последовательно вычисляется во временных точках t1, t2 и т.д., как показано на рисунке 56.
Рисунок 56 – Разбиение временного интервала на шаги
В конечном итоге изменение переменной в зависимости от времени можно
представить в виде последовательности различных пространственных значений в
дискретных временных точках, как показано на рисунке 57 (для двухмерной задачи).
Рисунок 57 – Разбиение временного интервала на шаги
86
Для дискретизации производной по времени должен быть известен как минимум один временной уровень. Если используется один временной уровень, т.е. значения производной в момент tn, то речь идет об одношаговых методах, и, если применяется несколько временных уровней, т.е. значения в моменты времени tn, tn-1, …, то
речь идет о многошаговых методах.
Кроме того и, что более важно, методы для дискретизации времени, в общем
случае, подразделяются на два класса в зависимости от того, как выбираются временные точки, в которых вычисляется правая часть уравнений. Эти классы представляют:
‐ явные методы, когда дискретизация правой части осуществляется только на
предыдущих (уже известных) временных уровнях:
n1 F n , n1 ,
(108)
‐ неявные методы, когда дискретизация правой части также осуществляется и
на новых (неизвестных) временных уровнях:
n1 F n1 , n , n1 , ,
(109)
где оператор F обозначает выбранное правило дискретизации.
К явным методам относятся одношаговые методы Эйлера и Рунге-Кутты, а
также многошаговые методы Адамса-Башфорта. К неявным методам относятся одношаговый неявный метод Эйлера, одношаговый метод Кранка-Николсона, и многошаговые методы Адамса-Моултона.
Достоинством явных методов является простота использования и параллелизации при высокой производительности вычислений, а их недостатками:
‐ необходимость использования малых временных шагов из-за проблем со
стабильностью решения, особенно когда скорость и/или размер сетки сильно варьируют;
‐ чрезвычайная неэффективность в решении стационарных проблем, если
только не используется локальный шаг времени, являющийся функцией размера
элементов сетки.
87
К достоинствам неявных методов относятся:
‐ стабильность в широком диапазоне величин временных шагов;
‐ возможность использования в качестве превосходных итерационных решателей для стационарных задач.
Недостатками этих методов являются:
‐ сложность использования и параллелизации при высоких затратах вычислительных мощностей;
‐ недостаточная точность при решении нестационарных задач с большими
временными шагами;
‐ ухудшающаяся сходимость линейных решателей при увеличении временного шага.
3.8 Контрольные вопросы
1 Что может включать себя типовое описание дискретной модели решаемой
задачи?
2 Каким требованиям должна удовлетворять конечно-элементная сетка, создаваемая автоматизированным сеточным генератором?
3 По каким признакам можно классифицировать конечно-элементные сетки?
4 Каким образом подразделяются методы генерации сеток?
5 Чем характеризуются структурированные сетки?
6 Чем характеризуются неструктурированные сетки?
7 В чем заключаются достоинства и недостатки структурированных сеток?
8 В чем заключаются достоинства и недостатки неструктурированных сеток?
9 Что собой представляет мультиблочная структурированная сетка?
10 На чем основаны методы отображения, используемые для построения
структурированной сетки?
11 На чем основан метод заметания, используемый для построения структурированной сетки?
12 На чем основаны методы пространственной декомпозиции, используемые
88
для построения неструктурированной сетки?
13 Какие шаги включает в себя классическая схема метода квадрантного/октантного дерева?
14 Какие достоинства и недостатки имеют методы пространственной декомпозиции?
15 В чем заключается основная идея метода продвигаемого фронта, используемого для построения неструктурированной сетки?
16 Какие этапы включает в себя классическая схема метода продвигаемого
фронта?
17 Что относится к достоинствам и недостаткам метода продвигаемого фронта?
18 Что собой представляет триангуляция Делоне?
19 Что собой представляет диаграмма Вороного?
20 В чем заключаются особенности алгоритма двухмерной триангуляции
Ватсона-Боуайера?
21 Какие этапы включает в себя обобщенная схема триангуляции Делоне?
22 Что является достоинствами и недостатками методов триангуляции Делоне?
23 Что понимается под качеством конечно-элементной сетки?
24 Каким образом может производиться преобразование формы конечных
элементов?
25 На чем основан метод бисекции ребра, используемый при уточнении сетки?
26 На чем основан метод вставки точки, используемый при уточнении сетки?
27 На чем основан метод шаблонов, используемый при уточнении сетки?
28 Что собой представляет метод сглаживания Лапласа, используемый для
повышения качества сетки?
29 Как производится изменение сетки при использовании вариационного
сглаживания?
30 Каким образом осуществляется дискретизация времени при проведении
конечно-элементного анализа нестационарных процессов?
31 Какие методы используются для дискретизации времени в конечноэлементном анализе?
89
4 Моделирование материалов
Важной составляющей конечно-элементного анализа является моделирование
материалов, из которых строится рассматриваемый физический объект. Модели материала (часто называемые определяющими моделями) представляют собой математическое описание отклика реальных материалов на различные условия нагружения.
Они устанавливают зависимость между перемещениями (или другими полевыми
переменными) исследуемого объекта и приложенными к нему нагрузками.
Существующие модели материалов различаются в зависимости от типа конструкционного материала (металлы и сплавы, полимеры, бетон, дерево и т.д.), поскольку физические механизмы, которые вызывают разрушение материала на макроскопическом (наблюдаемом) уровне совершенно различны. Модели материалов
являются математическим упрощением их сложного физического поведения.
Несмотря на то, что свойства материалов определяются их микроструктурой,
все они, в большей или меньшей степени, проявляют сходное механическое поведение (упругость, текучесть, пластическое деформирование, гистерезис при циклическом нагружении, разрушении при монотонном нагружении и рост трещин при статическом и динамическом нагружении). Отсюда вытекает возможность успешной
разработки моделей, описывающих общее поведение материалов, при помощи механики сплошных сред и термодинамики необратимых процессов без углубления в
детали их сложных физических микроструктур.
4.1 Современные подходы к моделированию материалов
В настоящее время существует три основных подхода к построению моделей
материалов, которыми являются фундаментальный (микромеханический), феноменологический и статистический подход.
4.1.1 Фундаментальный подход
Фундаментальный подход к моделированию материалов основан на глубоком
понимании микроструктурных процессов, вызывающих деформацию и разрушение
90
материала. Эти процессы характеризуются элементарными определяющими взаимосвязями, в связи с чем такой подход называется микромеханическим моделированием. Макроскопическое поведение материала является результатом их усреднения
(гомогенизации), которое иногда выполняется аналитически, но чаще с использованием численных методов, основанных на представительном объемном элементе
(RVE – Representative Volume Element).
Под представительным объемным элементом понимается объем материала достаточно большой для представления его неоднородностей, но в тоже время достаточно малый для его рассмотрения в качестве точки, что позволяет применить к нему
уравнения механики сплошных сред. Размер такого элемента часто определяется периодичностью микроструктурной решетки и составляет около 0,1 мм3 для металлических материалов. Данный подход применим не только к материалам с упорядоченными решетками, но и к «неупорядоченным» средам (камень, почва и т.п.).
Непосредственная идентификация материалов с использованием фундаментального подхода является затруднительной из-за сложностей в измерении микроскопических переменных, необходимых для разработки модели (плотность дислокаций, текстура и т.д.) поэтому фундаментальный подход к моделированию материалов до сих пор находится в стадии разработки.
4.1.2 Феноменологический подход
Феноменологический подход является наиболее распространенным подходом,
основанным на изучении поведения малого объема материала, подвергнутого элементарным испытаниям. По результатам этих испытаний непосредственно выводятся макроскопические модели, не учитывающие сложные микроструктурные процессы. По существу, математическая функция, которая выражает нелинейную зависимость между параметрами материала, устанавливается на основе наблюдаемых, т.е.
физически доступных переменных (таких как напряжения, относительные деформации, температура и т.д.) и дополнительных ненаблюдаемых (внутренних) переменных, которые выражают общее влияние микроструктурных изменений на элементарный объем. Таким образом, внутренние переменные здесь определены на макро91
уровне. Полученные математические модели подвергаются отладке, целью которой
является минимизация различий между прогнозируемым откликом и экспериментальными данными.
4.1.3 Статистический подход
Третьим и наименее фундаментальным подходом к описанию поведения материалов является статистический подход. Статистические модели обычно устанавливаются как функции отклика на специфические комбинации нагрузок и условий
окружающей среды, из-за чего применимость таких моделей за пределами этих
комбинаций является чрезвычайно спорной.
4.2 Модели материалов, используемые в конечно-элементном анализе
Для описания поведения материалов в конечно-элементном анализе используются макроскопические модели. Эти модели обычно определяют зависимости
между механическими напряжениями и относительными деформациями, тепловыми
потоками и температурными градиентами, силами токов и электрическими напряжениями. Кроме того они задают более общие характеристики, такие как трение и
адгезионное сцепление, а также отклик на изменения физической среды, как,
например, температурное расширение и набухание.
Используемые в конечно-элементном анализе модели материалов можно разделить на три основные группы, которыми являются:
‐ модели для механических приложений;
‐ модели для температурных приложений;
‐ модели для электромагнитных приложений.
4.2.1 Модели для механических приложений
Наиболее обширной группой моделей материалов являются модели для механических приложений, т.е. для решения задач механики твердого тела. К основным
из них относятся:
92
‐ упругая модель;
‐ вязкоупругая модель;
‐ пластическая модель;
‐ вязкопластическая модель.
4.2.1.1 Упругая модель
Упругая модель материала представляет собой математическое описание идеального упругого материала со следующими характеристиками:
‐ кривая зависимости деформации от напряжения при разгружении и нагружении имеет одинаковый вид;
‐ скорость нагружения или деформирования не влияет на поведение материала;
‐ материальный объект возвращается в свою исходную форму после снятия
нагрузки, т.е. не сохраняет приданную ему деформацию.
Типовые кривые деформирования для идеальной упругой модели материала,
подвергнутого растяжению (сжатию) представлены на рисунке 58. Отклик линейного упругого материала, где напряжение пропорционально деформации, показан на
рисунке 58а, а отклик нелинейного упругого материала показан на рисунке 58б.
Рисунок 58 – Упругие модели: а) линейная упругая; б) нелинейная упругая
Линейная упругая модель описывает поведение конструкционных материалов
в интервале, ограниченным их пределом упругости. Также она полностью представляет кривую деформирования до точки разрушения многих хрупких материалов.
Кроме того, модель может быть использована для описания отклика практически
93
любого материала при условии, что напряжения в нем достаточно малы.
Нелинейная упругая модель полезна для прогнозирования отклика мягких материалов, таких как резина и биологические мягкие ткани.
4.2.1.2 Вязкоупругая модель
Материал называется вязкоупругим, если он имеет упругую (обратимую) составляющую, а также вязкую (необратимую) составляющую, т.е. имеет некоторые
характеристики, присущую жидкостям. Жидкость представляет собой вещество, которое легко растекается при его нагружении, т.е. не способно сохранять какую-либо
конкретную форму. Если принять жидкость в качестве одного («вязкого») экстремума и упругое твердое тело в качестве другого экстремума, тогда вязкоупругий материал будет чем-то средним между ними.
При приложении нагрузки к такому материалу упругая деформация возникает
мгновенно, в то время как, вязкая деформация возникает постепенно с течением
времени. Вязкоупругая модель обычно используется для описания деформационного поведения стекла или стеклоподобных материалов и позволяет моделировать
циклы нагрева и охлаждения таких материалов. Эти материалы обращаются в вязкие
жидкости при высоких температурах и становятся твердыми телами при низких
температурах. Вязкоупругая модель также используется для моделирования полимерных материалов, полимерных композитов и биологических тканей.
Типовой отклик вязкоупругого материала изображен на рисунке 59. В отношении него необходимо сделать следующие замечания:
‐ кривые нагружения и разгружения не совпадают, а формируют петлю гистерезиса;
‐ скорость деформации d/dt является зависимой, т.е. более быстрое растяжение требует большего уровня напряжений;
‐ после полного разгружения материала возможно сохранение некоторой
остаточной деформации.
94
Рисунок 59 – Отклик вязкоупругого материала при растяжении: а) нагрузка и
разгрузка с возможной остаточной деформацией; б) различные скорости растяжения
Эффект скорости растяжения показывает, что поведение вязкоупругого материала зависит от времени. Это отличает его от упругого материала, результирующая
деформация которого остается одинаковой независимо от скорости нагружения и
продолжительности действия нагрузки. Данный эффект вязкоупругого материала
может быть проиллюстрирован простым примером надавливания раскрытой ладонью на поверхность воды, когда ладонь погружается в воду легче при медленном
надавливании и труднее при быстром надавливании.
В зависимости от того насколько ближе материал к жидкости или твердому
телу, он может рассматриваться как вязкоупругая жидкость, например, кровь или
зубная паста либо вязкоупругое тело, например, жвачка для рук («Silly PutyTM») или
пена. В обоих случаях модель и подкрепляющая ее теория будут одинаковыми.
4.2.1.3 Пластическая модель
Поведение материала пластичных тел характеризуется необратимым деформированием, которое наблюдается в материале при достижении определенного
уровня напряжений. Такое поведение имеет следующие характеристики:
‐ нагружение является упругим до некоторого предела, после которого возникает остаточная деформация;
‐ предполагается, что остаточная деформация возникает мгновенно, т.е. пла95
стичность не зависит от времени.
При этом возможны несколько моделей пластичности, к которым относятся:
идеально жесткое пластическое тело, идеально упругое пластическое тело и упругопластическое упрочняемое тело.
Идеально жесткое пластическое тело является простейшей моделью пластичности (рисунок 60). При ее использовании тело изменяет свою форму только, если
приходящаяся на него нагрузка превышает предел текучести материала и затем деформируется при постоянном уровне напряжений. Она применима для моделирования грунтов или для анализа процессов обработки металлов давлением.
Рисунок 60 – Идеально жесткое пластическое тело
Идеально упругое пластическое тело (рисунок 61) деформируется по линейному закону при нагрузке, не превышающей предел упругости, и деформируется
при постоянном уровне напряжений после превышения этого предела. Такая модель
подходит, например, для прогнозирования рассеяния энергии при анализе ударной
прочности или для вычисления сил резания при механической обработке.
Рисунок 61 – Идеально упругое пластическое тело
96
Более сложные модели, такие как упругопластическое упрочняемое тело (рисунок 62) каким-либо образом описывают упрочнение материала (изменение предела текучести совместно с пластической деформацией). Они используются для моделирования хрупкого разрушения, малоцикловой усталостной прочности (где материал многократно подвергается пластическим деформациям) и для прогнозирования остаточных
напряжений и упругого последействия в процессах обработки металлов давлением.
Рисунок 62 – Упругопластическое упрочняемое тело
Пластическая модель особенно полезна при описании остаточных деформаций,
которые возникают в металлах, грунтах и других конструкционных материалах.
4.2.1.4 Вязкопластическая модель
Вязкопластическая модель представляет собой комбинацию вязкоупругой и
пластической моделей. В данной модели пластичность зависит от скорости деформирования (рисунок 63а). Одной из основных областей применения данной модели
является исследование поведения металлов (ползучести) при высоких температурах
(от 30 % до 60 % от температуры плавления). Также она используется для моделирования широкого диапазона других материалов, таких как асфальт, бетон, глина,
бумажная масса и т.д.
Для полимеров и некоторых металлических сплавов при превышении предела
текучести наблюдается незамедлительное размягчение материала, которое затем переходит в упрочнение при росте деформаций. В этом случае кривая напряжениядеформации зависит от скорости деформации, но начальное напряжение текучести
остается постоянным (рисунок 63б).
97
Рисунок 63 – Пластическая деформация, зависимая от скорости деформирования (а),
и размягчение с последующим упрочнением (б)
4.2.2 Модели для температурных приложений
Для проведения тех типов анализа, где исследуемой степенью свободы является температура, применяются модели материала, позволяющие оценивать зависимость плотности теплового потока от градиента температуры при кондуктивном
теплообмене, а также взаимодействие между телами при радиационном теплообмене, обусловленное разностью поверхностных температур.
Простейшей моделью теплообмена является модель передачи теплового потока
через стенку фиксированной толщины. В этой модели количество переданной теплоты (рисунок 64) прямо пропорционально произведению площади стенки (A) и разности температур между горячей (Tгор.) и холодной (Tхол.) стороной стенки и обратно
пропорционально толщине стенки (L). Соответствующий коэффициент пропорциональности называется коэффициентом теплопроводности и является основной характеристикой модели материала.
Рисунок 64 – Теплота, передаваемая через стенку от нагретой стороны к холодной
98
Значения коэффициента теплопроводности варьируют в широком диапазоне,
ограниченном теплопроводностью изоляторов и проводников тепла (рисунок 65).
Рисунок 65 – Коэффициенты теплопроводности различных материалов
Модель радиационного теплообмена позволяет моделировать передачу теплоты между телами с различной температурой или излучение теплоты в окружающую
среду (рисунок 66). При этом свойства окружающей среды не учитываются, т.е. не
имеет значения погружено ли тело в жидкость или находится в вакууме.
Количество теплоты, которой обмениваются грани двух излучающих тел с
температурами T1 и T2 пропорционально абсолютной разности четвертой степени
этих температур и излучательной способности (коэффициенту излучения) излучающей поверхности. Под излучательной способностью понимается отношение мощности излучения поверхности к мощности излучения абсолютно черного тела при
одинаковой температуре. В данном случае излучательная способность является основной характеристикой материала и может варьировать в диапазоне от нуля до
единицы. При этом единица соответствует абсолютно черному телу, а нуль идеальному отражателю. Поскольку радиационный теплообмен пропорционален четвертой
степени абсолютной температуры, он приобретает особенную важность при высоких температурах исследуемых объектов.
99
Рисунок 66 – Радиационный теплообмен между телами и окружающей средой
4.2.3 Модели для электромагнитных приложений
Модели материала, используемые для решения задач с электромагнитными
степенями свободы, подразделяются на следующие типы:
‐ модели магнетизма, позволяющие определять магнитодвижущую силу как
отклик на магнитный поток;
‐ модели электропроводности, устанавливающие зависимости между магнитным потоком или потоком вектора напряженности электрического поля и соответствующими полями;
‐ модели диэлектрической и магнитной проницаемости, позволяющие оценивать запас энергии, накопленной в материале, подвергающегося воздействию электромагнитного поля;
‐ модели электромагнитных потерь, представляющие энергетические потери
в электромагнетиках и диэлектриках, которые обусловлены изменениями воздействующих на них электромагнитных полей.
4.3 Параметры материалов
Поскольку модели материалов выражают математические зависимости между
степенями свободы конечно-элементной модели и ее нагрузками, постольку они
требуют ввода тех или иных параметров, позволяющих описать необходимое пове100
дение реального материала. В некоторых случаях эти параметры могут быть функцией различных физических величин, таких как температура, частота или время либо функцией производных величин, таких нормальное давление, относительно перемещение или относительная скорость.
В каждом конкретном случае анализа набор параметров, характеризующих
модель материала, может существенно различаться в зависимости от типа анализа и
вида модели материала. Однако среди них можно выделить несколько базовых параметров, которые наиболее часто используются для описания материалов в конечно-элементном анализе. К ним относятся параметры, которые перечислены ниже.
Модуль продольной упругости (модуль Юнга), представляющий собой меру
того, насколько легко материал удлиняется при его нагружении растягивающей силой или укорачивается при его нагружении сжимающей силой. Чем больше значение модуля упругости, тем большая сила будет требоваться для растяжения или
сжатия материала. Например, модуль упругости алюминиевых сплавов находится в
диапазоне от 70 до 79 ГПа, в то время как, модуль упругости конструкционных сталей варьирует от 190 до 210 ГПа, следовательно, жесткость стали приблизительно в
три раза больше жесткости алюминиевых сплавов.
Модуль поперечной упругости (модуль сдвига), являющийся мерой того,
насколько легко материал может быть закручен или сдвинут. Его значения характеризуют сопротивление материала деформациям сдвига. Значение модуля сдвига
необходимо учитывать при расчете валов и стержней, нагруженных вращающими
моментами. Например, модуль сдвига для алюминиевых сплавов изменяется от 26
до 36 ГПа, в то время как, для сталей этот диапазон составляет от 75 до 80 ГПа. Следовательно, сопротивление сдвигу для стали приблизительно в 2,5 раза больше, чем
для алюминия.
Плотность, определяемая как масса, приходящаяся на единицу объема материала, и являющаяся мерой тяжести заданного объема материала. Например, средняя плотность алюминиевых сплавов составляет 2700 кг/м 3, а для сталей она составляет 7850 кг/м3, откуда следует, что алюминий примерно в три раза легче, чем сталь.
101
Коэффициент линейного расширения, который может быть использован для
определения изменения линейных размеров материала, вызванных изменениями его
температуры. Данный параметр материала имеет особенную важность при проектировании изделий и конструкций, которые в процессе свой эксплуатации подвергаются достаточно большим колебаниям температуры.
Теплопроводность, являющаяся свойством материала, которое показывает,
насколько хорошо материал передает в своих пределах тепловую энергию (теплоту)
из областей с высокой температурой в области с низкой температурой.
Удельная теплоемкость. Некоторые материалы способны лучше, чем другие
сохранять тепловую энергию. Величина удельной теплоемкости выражает количество теплоты, необходимое для повышения температуры одного килограмма массы
материала на один градус Цельсия. Чем больше значение удельной теплоемкости
материала, тем лучше материал способен сохранять тепловую энергию.
Электрическое сопротивление, представляющее собой меру сопротивления
материала электрическому току. Например, пластики и керамика обычно имеют высокое сопротивление, в то время как, металлы обычно имею низкое сопротивление,
и лучшими проводниками электричества являются серебро и медь.
4.4 Контрольные вопросы
1 Что собой представляют модели материалов, используемые в конечноэлементном анализе?
2 В чем заключается фундаментальный подход к моделированию материалов?
3 В чем заключается феноменологический подход к моделированию материалов?
4 В чем заключается статистический подход к моделированию материалов?
5 На какие основные группы можно разделить модели материалов, применяемые в конечно-элементном анализе?
6 Чем характеризуются упругие модели материала?
7 Чем характеризуется вязкоупругие модели материала?
8 Чем характеризуются пластические модели материала?
102
9 Что собой представляет модель идеально жесткого пластического тела?
10 Что собой представляет модель идеально упругого пластического тела?
11 Что собой представляет модель упругопластического упрочняемого тела?
12 Чем характеризуются вязкопластические модели материала?
13 Чем характеризуется модель кондуктивного теплообмена?
14 Что позволяет моделировать модель радиационного теплообмена?
15 На какие типы подразделяются модели материала, используемые для решения задач с электромагнитными степенями свободы?
16 Что собой представляет модель продольной упругости материала?
17 Что собой представляет модуль поперечной упругости материала?
18 Какие параметры характеризуют тепловые свойства материала?
103
5 Краткие сведения о решении конечно-элементных уравнений
5.1 Решение уравнений равновесия в статическом анализе
Решение задач статического анализа с использованием МКЭ, в общем случае,
сводится к решению матричного уравнения:
[K] {U} {F}
(110)
где [K] – глобальная матрица жесткости;
{U} – вектор перемещений (матрица-столбец);
{F} – вектор нагрузок (матрица-столбец).
Данное матричное уравнение может быть представлено в скалярной форме как
система линейных уравнений:
k 11u1 k 12u 2 k 1n u n f1
k u k u k u f
21 1
22 2
2n n
2
k n1u1 k n 2u 2 k nn u n f n
(111)
Следовательно, матрицы в исходном уравнении будут иметь вид:
k 11 k 12 k 1n
k
21 k 22 k 2n
K
,
nn
k n1 k n 2 k nn
u1
u
U 2 ,
n1
u n
f1
f
F 2 ,
n1
f n
(112)
где коэффициенты жесткости kij и нагрузки fi являются известными величинами. Соответственно, проблема заключается в решении уравнений относительно
неизвестных величин ui, что в матричной форме имеет вид:
U K 1 F,
(113)
104
где [K]–1 – обратная матрица жесткости.
Математические методы, используемые для решения систем линейных уравнений, можно разделить на прямые и итерационные.
Прямые методы, в отсутствие погрешностей округления, дают точное решение
путем выполнения конечного числа элементарных арифметических операций. Однако на практике, вследствие того, что компьютер работает с конечным числом знаков в представлении чисел, прямые методы могут давать неточные и даже неприемлемые результаты.
Итерационные методы осуществляют решение путем задания некоторого
начального приближения корней уравнений, которое при помощи подходящих алгоритмов постепенно уточняется до тех пор, пока не будет достигнута приемлемая
точность аппроксимации. Точность и скорость сходимости решения для итерационных методов варьируют в зависимости от используемого алгоритма. Главными достоинствами итерационных методов являются их простота и единообразие выполняемых операций, что делает их хорошо подходящими для использования на компьютере, а также их относительно низкая чувствительность к ошибкам округления.
К прямым методам относятся:
‐ метод Гаусса, сущность которого состоит в последовательном исключении
неизвестных из системы уравнений;
‐ LU-метод (LU-разложение), основанный на представлении матрицы жесткости в виде произведения двух треугольных матриц (нижней треугольной матрицы
L и верхней треугольной матрицы U);
‐ метод квадратного корня, основанный на разложении матрицы жесткости в
произведение верхней треугольной матрицы и транспонированной к ней матрицы;
‐ метод вращений, основанный на представлении матрицы жесткости в виде
произведения ортогональной матрицы и верхней треугольной матрицы.
К итерационным методам относятся:
‐ метод простой итерации (метод Якоби), основанный на исключении i-й переменной из i-го уравнения исходной системы;
‐ метод Гаусса-Зейделя, который можно рассматривать как модификацию ме105
тода Якоби, заключающуюся в том, что при вычислении очередного (k+1)-го приближения к i-ой переменной используют уже найденные (k+1)-ые приближения к
переменным 1,...,i-1;
‐ метод сопряженных градиентов.
5.2 Решение задач на собственные значения
Вынужденные колебания конструкции в конечно-элементной постановке могут быть выражены следующим образом:
} [K] {U} {F} ,
[M] {U
(114)
где [M] – матрица масс конструкции;
[K] – матрица жесткости конструкции;
{Ü} – вектор ускорений;
{U} – вектор перемещений;
{F} – вектор внешних нагрузок.
При анализе свободных колебаний вектор внешних нагрузок равен нулю, и
перемещения изменяются по гармоническому закону, то есть:
{U} {U}e it
(115)
Тогда исходное уравнение принимает вид:
([K ] 2 [M]) {U} 0 или [K] {U} [M] {U} ,
(116)
где {Ū} – вектор, представляющий амплитуды перемещений U, и называемый
формой колебаний или собственным вектором;
– собственная частота колебаний, рад/с;
2 = – собственное значение, рад/с2.
106
Полученное уравнение выражает обобщенную задачу на собственные значения. Она имеет ненулевое решение относительно вектора {Ū}, когда определитель
матрицы ([K] – 2[M]) равен нулю, то есть:
[K ] 2 [M ] 0
(117)
Конструкция, имеющая n степеней свободы, имеет n собственных частот. Это
утверждение справедливо, если в исходном уравнении устранены степени свободы
жестких тел. Если при выводе матриц [K] и [M] они не устранены, то некоторые из
собственных частот будут равны нулю. В таком случае для обобщенной трехмерной конструкции будут иметь место шесть степеней свободы жестких тел и, следовательно, существовать шесть нулевых собственных частот.
В большинстве известных численных методов, используемых для решения
уравнения (116), обобщенная задача на собственные значения сначала преобразуется в форму стандартной задачи на собственные значения, которая может быть сформулирована как:
[H] {U} {U} или ([H] [I]) {U} 0
(118)
Данное уравнение может быть получено путем умножения уравнения (116) на
[M]–1, где [H] = [M]–1[K], а [I] – единичная матрица.
Выраженная таким способом матрица [H] обычно является несимметричной, в
то время как матрицы [M] и [K] симметричны. Так как симметричная матрица более
предпочтительна с точки зрения ее хранения на компьютере и времени вычислений, к
ней применяется специальная процедура для ее приведения к симметричному виду.
Для вычисления собственных значений i применяются два обобщенных класса методов, а именно прямые методы и итерационные методы. Прямые методы, такие как метод Якоби, Гивенса (вращений), Хаусхолдера (отражений) предпочтительно использовать, когда нужно найти все собственные значения, и размерность
задачи является малой. Итерационные методы, такие как степенной метод, метод
107
итераций подпространства и метод Ланцоша предпочтительны, когда требуется
найти лишь несколько собственных значений и решаемая задача имеет большую
размерность.
5.3 Решение уравнений равновесия в динамическом анализе
Динамическое уравнение движения конструкции может быть записано в следующем виде:
} [C] {U
} [K] {U} {F} ,
[M] {U
(119)
где [M], [C] и [K] – соответственно матрицы масс, демпфирования и жесткости конструкции;
{Ü}, {Ú} и {U} – векторы ускорений, скоростей и перемещений;
{F} – вектор внешних нагрузок.
Иначе это уравнение может быть записано как:
FI (t ) FD (t ) FE (t ) F(t ) ,
(120)
где FI(t) = MÜ – силы инерции;
FD(t) = CÚ – демпфирующие силы;
FE(t) = KU – упругие силы.
Математически, приведенное уравнение представляет систему линейных
дифференциальных уравнений второго порядка, и в принципе, ее решение может
быть получено стандартными процедурами для решения дифференциальных уравнений с постоянными коэффициентами. Однако эти процедуры могут быть очень
затратными, если матрицы имеют большую размерность. Поэтому в практике конечно-элементного анализа для решения этого уравнения применяются несколько
более эффективных методов.
Они подразделяются на методы прямого интегрирования и модальной суперпозиции. На первый взгляд эти методы сильно отличаются друг от друга, но по факту они тесно связаны, и выбор того или иного метода определяется только его вычислительной эффективностью.
108
5.4 Контрольные вопросы
1 К чему сводится решение задач статического анализа с использованием метода конечных элементов?
2 Чем характеризуются прямые методы, используемые для решения систем
линейных уравнений?
3 Чем характеризуются итерационные методы, используемые для решения
систем линейных уравнений?
4 Какие методы относятся к прямым методам решения систем линейных
уравнений?
5 Какие методы относятся к итерационным методам решения систем линейных уравнений?
6 Какое математическое выражение имеет обобщенная задача на собственные
значения?
7 В каких случаях целесообразно использовать прямые методы решения задачи на собственные значения?
8 В каких случаях целесообразно использовать итерационные методы решения задачи на собственные значения?
9 Какой вид имеет динамическое уравнение движения конструкции, записанное в матричной форме?
109
Список использованных источников
1 Barkanov, E. Introduction to the Finite Element Method / E. Barkanov. – Riga:
Riga Technical University, 2001. – 70 p.
2 Carroll, W. F. A Primer for Finite Elements in Elastic Structures / W. F. Carroll.
– New York: John Wiley & Sons, Inc., 1998. – 512 p. – ISBN: 978-0-471-28345-4.
3 Frey, P. J. Mesh Generation. Application to Finite Elements / P. J. Frey, P.-L.
George. – 2nd ed. – London: ISTE Publishing Company, 2008. – 814 p. – ISBN 978-184821-029-5.
4 Hutton, D. V. Fundamentals of Finite Element Analysis / D. V. Hutton. – 1st ed.
– New York: McGraw Hill, 2003. – 640 p. – ISBN 0-07-239536-2.
5 Le, K. H. Finite Element Mesh Generation Methods: A Review and Classification
/ K. H. Le // Computer-Aided Design, 1988. – Volume 20, Issue 1. – P. 27-38.
6 Moaveni, S. Finite Element Analysis: Theory and Application with ANSYS / S.
Moaveni. – 4th ed. – Harlow: Pearson Education Limited, 2015. – 936 p. – ISBN 978-013-384080-3.
7 Moaveni, S. Engineering Fundamentals: An Introduction to Engineering / S.
Moaveni. – 3th ed. – Toronto: Thomson Learning, 2008. – 634 p. – ISBN 978-0-49508253-8
8 Oñate, E. Structural Analysis with the Finite Element Method. Linear Statics.
Volume 1: Basis and Solids / E. Oñate. – Heidelberg: Springer Netherlands, 2009. – 446 p.
– ISBN 978-1-4020-8733-2.
9 Oñate, E. Structural Analysis with the Finite Element Method. Linear Statics.
Volume 2: Beams, Plates and Shells / E. Oñate. – Heidelberg: Springer Netherlands, 2013.
– 864 p. – ISBN 978-1-4020-8743-1.
10 Owen, S. J. A Survey of Unstructured Mesh Generation Technology / S. J. Owen // Proceedings of 7th International Meshing Roundtable, 1998. – 28 p.
11 Shäfer, M. Computational Engineering – Introduction to Numerical Methods /
M. Shäfer. – Berlin: Springer-Verlag, 2006. – 321 p. – ISBN 978-3-540-30686-3.
12 Stasa, F. L. Applied Finite Element Analysis for Engineers / F. L. Stasa. – New
York: CBS Publishing, 1985. – 659 p. – ISBN 0-03-910744.
110