")
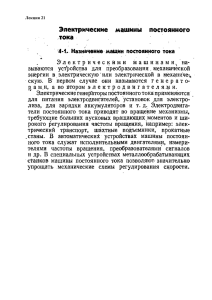
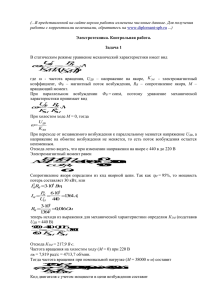
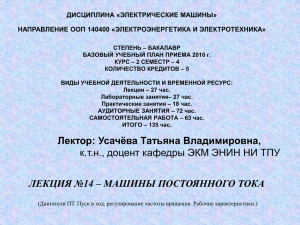
Федеральное агентство по образованию ГОУ ВПО "Уральский государственный технический университет – УПИ имени первого Президента России Б.Н.Ельцина" Кафедра "Электротехника и электротехнологические системы" Электротехника. Электрические машины постоянного тока Учебное пособие Учебное электронное текстовое издание В.С. Проскуряков, С.В. Соболев Екатеринбург 2008 Оглавление Введение. Основные понятия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Электрические машины постоянного тока . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1. Конструкция машин постоянного тока . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2. Принцип действия двигателя постоянного тока . . . . . . . . . . . . . . . . . . . 11 3. Принцип действия генератора постоянного тока . . . . . . . . . . . . . . . . . . 13 4. Способы возбуждения машин постоянного тока . . . . . . . . . . . . . . . . . . 15 5. Схема замещения и уравнения электрического состояния . . . . . . . . . . 17 6. Электромагнитный момент машины постоянного тока . . . . . . . . . . . . . 19 7. ЭДС якоря машины постоянного тока . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 8. Потери мощности в машине постоянного тока . . . . . . . . . . . . . . . . . . . . 21 9. Эксплуатационные характеристики генератора постоянного тока . . . . 24 10. Эксплуатационные характеристики двигателя постоянного тока . . . . 28 11. Разновидности машин постоянного тока, их применение . . . . . . . . . . 37 2 Введение. Основные понятия Электрическая энергия обладает рядом преимуществ по сравнению с другими видами энергии. Это определяет ее повсеместное использование. Одно из основных преимуществ – возможность эффективного преобразования в механическую энергию, а также возможность преобразования механической энергии в электрическую. Это осуществляется посредством электромеханических преобразователей, среди которых наиболее важное место занимают электрические машины. Электрические машины – это устройства, преобразующие электрическую энергию в механическую, либо механическую энергию в электрическую. В первом случае такая электрическая машина называется электрическим двигателем, во втором – генератором электроэнергии. Рис. В1. Преобразование энергии в электрической машине Электрические машины обладают свойством обратимости. Это означает, что одна и та же машина может работать как электродвигателем, так и генератором. Если вращать вал электрической машины, то на зажимах ее электрической обмотки создается разность электрических потенциалов, а при подключенном электроприемнике возникает электрический ток. Таким образом эта машина преобразует механическую энергию в электрическую, т.е. является генератором электроэнергии. С другой стороны, если электрическую обмотку 3 этой машины подключить к источнику электроэнергии, то в результате происходящих в ней процессов создается электромагнитный вращающий момент, под действием которого вал машины вращается и вращает приводной механизм. В этом случае машина преобразует электрическую энергию в механическую, т.е. является электрическим двигателем. В основе работы электрических машин лежат проявления магнитного поля. В частности электромагнитный вращающий момент возникает при взаимодействии магнитного поля, создаваемого в электрической машине, с электрической обмоткой, в которой замыкается ток (силовое действие магнитного поля). При работе электрической машины ее обмотки перемещаются относительно магнитного поля. При этом в обмотках индуцируется ЭДС (индукционное действие магнитного поля). Совместное действие этих проявлений магнитного поля определяет свойства и характеристики электрической машины. Таким образом, в основе конструкции электрических машин лежит магнитная цепь, в которой формируется магнитное поле определенной интенсивности и необходимым образом распределенное в пространстве. Характер магнитного поля, создаваемого в электрической машине, может быть разным. Магнитное поле может быть постоянным, создаваться постоянным магнитом или электрической обмоткой с постоянным током. Магнитное поле может быть переменным, создаваться неподвижной электрической обмоткой с переменным током, либо обмоткой с постоянным током, расположенной на вращающейся части электрической машины. Ток в электрической обмотке, которая взаимодействует с магнитным полем, также может быть постоянным либо переменным. В зависимости от характера магнитного поля, конфигурации магнитопровода магнитной цепи машины, характера электрического тока в ее обмотках все электрические машины можно разделить на типы: 1. Электрические машины постоянного тока; 2. Асинхронные электрические машины; 3. Синхронные электрические машины; 4. Специальные электрические машины. 4 В электрических машинах постоянного тока магнитное поле создается обмоткой возбуждения с постоянным электрическим током. Это магнитное поле определенным образом распределено в пространстве и неизменно во времени (рис.В2а). а б в Рис. В2. Магнитные цепи электрических машин 1 – машина постоянного тока; 2 – асинхронный двигатель; 3 – синхронная машина В асинхронном электродвигателе (рис.В2б) магнитное поле создается неподвижной трехфазной электрической обмоткой с трехфазным электрическим током. Такое магнитное поле равномерно вращается в пространстве. Вращающееся магнитное поле, взаимодействуя со второй обмоткой, расположенной на роторе, создает вращающий электромагнитный момент, под действием которого совершается механическая работа. В синхронной электрической машине (рис.В2в) магнитное поле создается обмоткой возбуждения с постоянным током, расположенной на вращающейся части. При этом постоянное магнитное поле вращается вместе с якорем и взаимодействует с неподвижной трехфазной электрической обмоткой, находящейся на статоре синхронной машины. К специальным электрическим машинам можно отнести такие, в которых создание магнитного поля и конструкция обмоток существенно отличаются от предыдущих типов машин. 5 Электрические машины постоянного тока В электрической машине постоянного тока (МПТ) осуществляется преобразование электрической энергии постоянного тока в механическую энергию (двигатель постоянного тока), или наоборот (генератор постоянного тока). Электрические машины постоянного тока обладают принципом обратимости. Поэтому конструкция двигателя постоянного тока (ДПТ) принципиально не отличается от конструкции генератора постоянного тока (ГПТ). 1. Конструкция машин постоянного тока На рис. 1 показа типичная конструкция машины постоянного тока общепромышленного применения. Основными частями машины постоянного тока являются статор и ротор. Статор – неподвижная часть машины, ротор – вращающаяся. Схематичное изображение машины постоянного тока показано на рис. 2. Статор состоит из станины 1, представляющий собой стальной полый цилиндр, являющейся механическим остовом машины и одновременно служащей частью магнитопровода. К внутренней поверхности станины крепятся главные полюсы 2 с обмоткой возбуждения (ОВ) 3. Катушки обмотки возбуждения, расположенные на главных полюсах, включаются так, чтобы северные и южные полюсы чередовались. Между главными полюсами могут располагаться дополнительные полюсы 4, служащие для улучшения характеристик машины. Обмотка дополнительных полюсов включается в цепь ротора (якоря) МПТ. Общий вид статора машины постоянного тока малой мощности показан на рис. 3. Ротор машины постоянного тока называется якорем. Якорь 5 (рис. 2) представляет из себя цилиндр, набранный из листов электротехнической стали. На наружной поверхности якоря имеются продольные пазы с уложенной в них обмоткой якоря (ОЯ) 6. Якорь помещается внутри статора и отделен от него 6 Рис. 1. Конструкция электрической машины постоянного тока. 1-станина; 2-полюс; 3-обмотка возбуждения; 4-дополнительный полюс; 5-якорь; 6-обмотка якоря; 7-коллектор; 8-обмотка дополнительных полюсов; 9-щетки; 11-щеткодержатель; 12-подшипниковый щит; 13-подшипник; 14-вал; 15-вентилятор; 16-рым-болт; 17-клеммная коробка 7 Рис. 2. Электрическая машина постоянного тока Рис. 3. Статор машины постоянного тока. 1 – обмотка возбуждения; 2 – полюс статора; 3 – станина небольшим воздушным зазором. Станина, полюсы и сердечник якоря образуют магнитную цепь, по которой замыкается магнитный поток машины. На рис. 2 показаны две силовые линии магнитного поля. Для соединения обмотки вращающегося якоря с внешней электрической цепью и коммутации тока якоря служит щеточно-коллекторный узел 7. Как по8 казано на рис. 4, цилиндрический коллектор состоит из отдельных медных коллекторных пластин 1, изолированных друг от друга. Каждая пластина коллектора соединена с соответствующей секцией обмотки якоря. Коллектор крепится на валу машины и вращается вместе с якорем. Рис. 4. Коллектор машины постоянного тока К наружной поверхности коллектора прижимаются неподвижные электрические щетки 2, установленные в щеткодержателях. Во время работы машины коллектор скользит по щеткам, обеспечивая скользящий электрический контакт. Общий вид якоря машины постоянного тока малой мощности показан на рис. 5. Рис. 5. Якорь машины постоянного тока. 1 – сердечник якоря с обмоткой; 2 – коллектор; 3 – подшипник; 4 – вал На рис. 6 показана машина постоянного тока серии ПЛ-061У4 .мощностью 60 Вт частотой вращения 1500 об/мин. 9 Рис. 6. Двигатель постоянного тока 1 – клеммная коробка; 2 – коллектор; 3 – подшипниковый щит; 4 - щетки Условное обозначение машины постоянного тока в схемах электрических цепей показано на рис. 7. Рис. 7. Условное обозначение машины постоянного тока в схемах электрических цепей 10 2. Принцип действия двигателя постоянного тока Схема включения двигателя постоянного тока показана на рис. 8. Здесь РМ – рабочий механизм, приводимый в движение электрическим двигателем. Обмотка возбуждения двигателя постоянного тока подключена к источнику постоянного напряжения Uв. Постоянный ток обмотки возбуждения Iв создает постоянное магнитной поле с магнитным потоком Фв. Магнитный поток замыкается в магнитной цепи машины по путям, обозначенным на рис. 2 пунктирными линиями. Магнитный поток возбуждения пронизывает обмотку якоря двигателя постоянного тока. Рис. 8. Схема включения двигателя постоянного тока Обмотка якоря также подключена к источнику постоянного напряжения U, под действием которого в ней возникает ток якоря Iя. Через скользящий щеточный контакт ток якоря подается в его обмотку таким образом, что его направление в проводниках, расположенных в зоне одного полюса, оказывается всегда постоянным (под северным полюсом – одного направления, под южным – другого). В соответствии с явлением силового действия магнитного поля на проводники обмотки якоря с током, находящиеся в магнитном поле возбуждения, действует электромагнитная сила. Направление действия силы определяет11 ся правилом левой руки. На рис. 9 схематично показана верхняя часть якоря, находящаяся в магнитном поле возбуждения под северным полюсом. Обмотка якоря упрощенно представлена несколькими проводниками круглого сечения. Рис. 9. Принцип действия двигателя постоянного тока Направление тока в проводниках обмотки якоря определяется полярностью подключения ее к источнику постоянного напряжения. На рис. 9 ток обмотки якоря обозначен крестиком, что соответствует направлению за плоскость рисунка. Направление магнитного потока определяется направлением тока в обмотке возбуждения (полярностью подключения обмотки возбуждения). При указанных на рис. 9 направлениях магнитного потока возбуждения и тока якоря на проводники обмотки якоря действует электромагнитная сила, направленная влево. Силы, действующие на каждый проводник обмотки якоря, складываются и создают электромагнитный вращающий момент МЭМ, приводящий якорь во вращение с частотой вращения n. При этом якорь, вращая рабочий механизм, совершает механическую работу. Таким образом, энергия электрического тока, подведенная к двигателю, преобразуется в механическую энергию. 12 Для изменения направления вращения двигателя достаточно изменит полярность подключения обмотки якоря или обмотки возбуждения. При вращении якоря ДПТ проводники обмотки якоря движутся в магнитном поле возбуждения. При этом в обмотке якоря индуцируется ЭДС, направление которой определяется правилом правой руки. В двигателе эта ЭДС направлена противоположно току и напряжению якоря (рис. 9) и компенсирует приложенное напряжение. 3. Принцип действия генератора постоянного тока Схема включения двигателя постоянного тока показана на рис. 10. Здесь Д – приводной двигатель, вращающий вал генератора. Рис. 10. Схема включения генератора постоянного тока Обмотка возбуждения генератора постоянного тока подключена к источнику постоянного напряжения Uв также, как в ДПТ. Постоянный ток обмотки возбуждения создает постоянное магнитной поле с магнитным потоком Фв. Магнитный поток замыкается в магнитной цепи машины по путям, обозначенным на рис. 2 пунктирными линиями. Магнитный поток возбуждения пронизывает обмотку якоря генератора постоянного тока. Якорь генератора вращается приводным двигателем Д (турбина, двига13 тель внутреннего сгорания и т.п.) с частотой вращения n. Проводники обмотки якоря, вращаясь вместе с ним движутся в магнитном поле возбуждения. При этом проявляется индукционное действие магнитного поля. Согласно закону электромагнитной индукции в таких проводниках индуцируется ЭДС, направление которой определяется правилом правой руки. На рис. 11 при указанных направлениях магнитного потока и вращения якоря ЭДС e в проводниках обмотки якоря направлена вдоль проводника за плоскость рисунка. Это направление обозначено крестиком. Рис. 11. Принцип действия генератора постоянного тока Конструкция обмотки якоря такова, что все ее проводники соединены последовательно. При этом ЭДС всех проводников складываются и создают разность электрических потенциалов, которая через пластины коллектора и щетки подается к зажимам генератора. На зажимах обмотки якоря генератора создается напряжение U. Если к зажимам обмотки якоря генератора присоединить приемник электрической энергии с сопротивлением Rп , то образуется электрическая цепь, в которой под действием напряжения U возникает ток IЯ , который замыкается в приемнике. Таким образом, генератор постоянного тока, потребляя от приводного двигателя механическую энергию, отдает электрическую энергию электроприемникам во внешнюю электрическую цепь, т.е. преобразует 14 механическую энергию в электрическую. Ток IЯ замыкается во всех проводниках обмотки якоря. При этом согласно явлению силового действия магнитного поля на каждый проводник с током, находящийся в магнитном поле возбуждения, действует электромагнитная сила FЭМ. Направление действия силы определяется правилом левой руки. Как видно на рис. 11, электромагнитные силы, действующие на проводники обмотки якоря, создают тормозной электромагнитный момент, направленный навстречу вращению якоря. Этот электромагнитный момент уравновешивает механический момент приводного двигателя. 4. Способы возбуждения машин постоянного тока Важным классификационным признаком машин постоянного тока является способ возбуждения главного магнитного поля, от которого зависят все основные характеристики как двигателей, так и генераторов. Существуют четыре способа возбуждения машин постоянного тока: независимое, параллельное, последовательное и смешанное возбуждение. На рис. 12 показаны схемы включения обмотки якоря и обмотки возбуждения при разных способах возбуждения. Указанные на схемах направления токов соответствуют работе машины в режиме генератора. При независимом возбуждении (рис. 12а) обмотка возбуждения питается от независимого источника с напряжением Uв. Ток приемника электроэнергии, подключенного к генератору, равен току якоря IЯ. В генераторе с параллельным возбуждением (рис. 12б) обмотка возбуждения подключена к зажимам якоря. Ток возбуждения определяется напряжением на зажимах генератора и равен Iв = U , Rв где Rв – сопротивление обмотки возбуждения; U – напряжение на зажимах генератора. 15 (1) Рис. 12. Способы возбуждения машин постоянного тока При этом соотношение между токами возбуждения, якоря и приемника определяется первым законом Кирхгофа: Iя = I + Iв . (2) Обмотка возбуждения в такой МПТ выполняется из тонкого провода с большим числом витков и обладает большим электрическим сопротивлением. В генераторе с последовательным возбуждением (рис. 12 в) обмотка возбуждения включается последовательно с обмоткой якоря. При этом токи якоря, 16 возбуждения и приемника равны между собой: Iя = Iв = I . (3) Последовательная обмотка возбуждения выполняется из провода большого сечения с малым числом витков и обладает небольшим электрическим сопротивлением. Малое сопротивление последовательной обмотки возбуждения незначительно сказывается на соотношении тока и напряжения в цепи якоря. Генератор со смешанным возбуждением (рис. 12 г) имеет две обмотки возбуждения: параллельную и последовательную. Генераторы с параллельным, последовательным и смешанным возбуждением получили название генераторов с самовозбуждением, поскольку их обмотки возбуждения питаются от зажимов собственного якоря. 5. Схема замещения и уравнения электрического состояния машин постоянного тока Для расчета и анализа электромагнитных процессов и характеристик машин постоянного тока необходимо моделирование машины с помощью электрической схемы замещения и соответствующих уравнений электрического состояния. При составлении схемы замещения необходимо отразить основные процессы, происходящие в якоре МПТ. В частности, обмотка якоря выполненная из провода конечных размеров (диаметр и длина) обладает определенным активным сопротивлением RЯ. Это обусловливает падение напряжения в обмотке якоря и безвозвратную потерю энергии в виде тепла как в генераторе, так и в двигателе. Сопротивление обмотки якоря учитывается в схеме замещения идеальным резистором с сопротивлением RЯ. Двигатель постоянного тока В двигателе постоянного тока при вращении якоря в его обмотке индуцируется ЭДС, направленная навстречу току и частично уравновешивающая приложенное напряжение. Это учитывается введением в схему замещения идеаль17 ного источника ЭДС величиной EЯ. Таким образом, напряжение источника, приложенное к обмотке якоря двигателя, уравновешивается падением напряжения на сопротивлении RЯ и величиной противоэдс EЯ: U = E я + I я Rя . (4) Уравнение (4) называют уравнением электрического состояния цепи якоря двигателя постоянного тока. Соответствующая такому уравнению электрического состояния схема замещения показана на рис. 13. Рис. 13. Схема замещения двигателя постоянного тока Умножив обе части уравнения (4) на ток IЯ, получим уравнение мощностей ДПТ: UI я = E я I я + I я2 R я , или Pэл = ∆Pя + Pэм , (5) (6) где Pэл = UI я - электрическая мощность, потребляемая якорем двигателя от источника электроэнергии; ∆Pя = I я2 R я - электрические потери мощности в обмотке якоря; Pэм = E я I я - электромагнитная мощность двигателя, преобразуемая в механическую. Генератор постоянного тока При работе МПТ в режиме генератора ток в приемнике и в обмотке якоря обеспечивается за счет ЭДС якоря, наводимой магнитным полем возбуждения. Эта ЭДС создает напряжение на зажимах генератора и компенсирует падение 18 напряжения в обмотке якоря. Уравнение электрического состояния ГПТ имеет вид: E я = U + Rя I я , (7) а соответствующая схема замещения показана на рис. 14. Рис. 14. Схема замещения генератора постоянного тока Уравнение мощностей ГПТ получается в виде: E я I я = UI я + Rя I я2 , или Pэм = Pэл + ∆Pя , (8) (9) где Pэм = E я I я - электромагнитная мощность, получаемая в результате преобразования механической энергии в электрическую; ∆Pя = R я I я2 - электрические потери мощности в обмотке якоря; Pэл = UI я - электрическая мощность, отдаваемая приемнику во внешнюю электрическую цепь. 6. Электромагнитный момент машины постоянного тока Как показано ранее, при наличии в обмотке якоря тока IЯ на ее проводники действует электромагнитная сила, которая создает электромагнитный вращающий момент. Согласно силовому действию магнитного поля сила, действующая на один проводник ОЯ, определяется индукцией магнитного поля B, током в проводнике IЯ и активной длиной проводника l: Fэм = I я Bl , [Н]. 19 (10) Электромагнитный момент, создаваемый всей обмоткой M эм = Fэм N D , 2 (11) где D – диаметр якоря; N – число проводников обмотки якоря. Индукция магнитного поля выражается через магнитный поток Фв в виде: B= Фв , [Тл], S (12) где S – сечение поверхности полюса. С учетом этих соотношений (10, 11, 12) электромагнитный момент равен: lD M эм = N I я Фв . 2S (13) Все параметры, стоящие в скобках, постоянны для одной и той же машины и определяются ее конструкцией. Их можно заменить одной постоянной СМ. Тогда выражение электромагнитного момента принимает вид: M эм = C М I я Фв , [Нм]. (14) Таким образом, электромагнитный момент машины постоянного тока пропорционален току в обмотке якоря IЯ и магнитному потоку возбуждения Фв. 7. ЭДС якоря машины постоянного тока При вращении якоря машины постоянного тока в его обмотке индуцируется ЭДС. ЭДС якоря зависит от величины магнитного потока возбуждения и частоты вращения якоря. ЭДС в одном проводнике обмотки якоря определяется индукцией магнитного поля В и скоростью движения проводника в магнитном поле v: e = Bvl , [В]. (15) ЭДС, создаваемая всей обмоткой якоря, содержащей N последовательно соединенных проводников, равна E я = eN , [В]. 20 (16) Выражая индукцию магнитного поля через магнитный поток возбуждения B= Фв , [Тл], S (17) и окружную скорость проводника через частоту вращения якоря v= πD n, 60 (18) получаем: 1 πD E я = Ф в n lN . S 60 (19) Величины, содержащиеся в скобках, постоянны для одной и той же машины и определяются ее конструкцией. Объединяя их одним постоянным коэффициентом Се, получаем выражение для ЭДС обмотки якоря: E я = C eФв n , [В]. (20) Таким образом, ЭДС обмотки якоря машины постоянного тока пропорциональна магнитному потоку возбуждения и частоте вращения якоря. Из сравнения выражений (13) и (19) можно получить соотношение постоянных СМ и Се , которое удобно использовать при практических расчетах и анализе характеристик МПТ: Ce = 2π CM . 60 (21) 8. Потери мощности в машине постоянного тока Преобразование энергии в машинах постоянного тока сопровождается потерями энергии. В МПТ можно выделить четыре источника потерь. Во-первых, обмотка возбуждения обладает определенным электрическим сопротивлением. Ток в этой обмотке создает электрические потери, пропорциональные квадрату тока и сопротивлению: ∆p в = I в2 Rв . 21 (22) Во-вторых, аналогичные потери имеют место в обмотке якоря. Они зависят от тока якоря, т.е. изменяются с изменением режима работы машины: ∆p я = I я2 R я . (23) Электрические потери в якоре в номинальном режиме работы составляют около половины всех потерь. В-третьих, при вращении якоря в магнитном поле возбуждения его сердечник циклически перемагничивается. При этом, как известно из теории магнитных цепей, возникают магнитные потери в магнитопроводе (∆pмаг), которые складываются из потерь на гистерезис и вихревые токи в сердечнике. Для уменьшения этих потерь магнитопровод якоря выполняется шихтованным из листов электротехнической стали. Магнитные потери составляют от 1 до 3 %. В-четвертых, при вращении якоря возникают потери от трения в подшипниках, трения щеток о коллектор, трения вращающихся частей о воздух (вентилляционые потери), которые объединяются в механические потери (∆pмех) и составляют от1 до 2%. Полезная мощность образуется из потребляемой за вычетом потерь. Энергетический баланс машины постоянного тока иллюстрируется диаграммами на рис. 15, 16. Рис. 15. Энергетическая диаграмма двигателя постоянного тока 22 Рис. 16. Энергетическая диаграмма генератора постоянного тока Двигатель постоянного тока (рис. 15) потребляет из сети электрическую энергию мощностью Р1. Ее можно разделить на две составляющие: энергия, поступающая в обмотку возбуждения мощностью Рв=UIв, и энергия, поступающая в обмотку якоря Ря=UIя. Энергия, потребляемая обмоткой возбуждения, расходуется на покрытие потерь в ней. Часть энергии, поступающей в якорь, тратится на электрические потери в обмотке якоря, магнитные потери, механические потери. Оставшаяся энергия, преобразованная в механическую (Р2), передается рабочему механизму, который вращается двигателем с частотой вращения n. Полезная мощность двигателя постоянного тока определяется вращающим моментом М на его валу и частотой вращения n: P2 = Pмех = Mn , [Вт]. 9 ,55 (24) Генератор постоянного тока потребляет механическую энергию от приводного двигателя, который вращает якорь генератора с частотой вращения n (рис. 16). Мощность приводного двигателя определяется его вращающим моментом Мпр и частотой вращения: P1 = M пр n 9 ,55 , [Вт]. (25) Потребляемая генератором механическая энергия за вычетом всех потерь преобразуется, как показано ранее, в электрическую энергию, которая передается в электрическую цепь приемнику электроэнергии. Составляющие потерь в генераторе постоянного тока аналогичны двигателю: механические потери 23 (∆pмех), магнитные потери (∆pмаг), электрические потери в обмотках возбуждения (∆pв) и якоря (∆pя). Полезная мощность генератора определяется напряжением и током в приемнике: P2 = UI или P2 = I 2 Rп . (26) Коэффициент полезного действия машины определяется соотношением полезной и потребляемой мощностей: P P2 η= 2 = . P1 P2 + Σ∆p (27) К.п.д. машины постоянного тока зависит от мощности. При номинальной мощности машины 100кВт номинальный к.п.д. 93-96%, а при номинальной мощности 100Вт – 60-65%. Следует иметь в виду, что номинальной мощностью считается полезная мощность, т.е. отдаваемая потребителю: Pном = P2ном . (28) Для генератора – это электрическая мощность, а для двигателя – механическая мощность. 9. Эксплуатационные характеристики генератора постоянного тока Режим работы генератора постоянного тока характеризуется напряжением на его зажимах U, частотой вращения n, током в обмотке якоря Iя и током возбуждения Iв. О поведении машины в разных режимах работы можно судить по ее характеристикам, которые представляют зависимость между двумя величинами при постоянных других. Основными являются: характеристика холостого хода, внешняя характеристика и регулировочная характеристика. Характеристика холостого хода Характеристика холостого хода (х.х.х.) – это зависимость напряжения на зажимах генератора от тока возбуждения при отсутствии нагрузки (Iп=Iя=0) и постоянной частоте вращения, равной номинальной (n=nном=const). График ха24 рактеристики холостого хода показан на рис. 17. Как следует из уравнения электрического состояния генератора постоянного тока (7), в режиме холостой ход, когда ток якоря равен нулю напряжение определяется величиной ЭДС. Eя = U . (29) Рис. 17. Характеристика холостого хода генератора постоянного тока В соответствии с (20) ЭДС обмотки якоря пропорциональна магнитному потоку возбуждения. Пренебрегая особенностями ферромагнитных материалов в магнитных цепях можно было бы полагать, что магнитный поток пропорционален току возбуждения. Однако при разомкнутой цепи возбуждения, когда ток возбуждения равен нулю (Iв=0) магнитный поток не равен нулю. Это обусловлено остаточной намагниченностью магнитной цепи. Магнитное поле остаточной намагниченности обусловливает начальную остаточную ЭДС якоря Еост. Наличие остаточной ЭДС обеспечивает условия для самовозбуждения ГПТ параллельного и смешанного возбуждения. С увеличением тока возбуждения увеличивается магнитный поток и в соответствии с (20) возрастает ЭДС якоря Ея. При дальнейшем увеличении тока возбуждения сказываются нелинейные свойства и насыщение магнитопровода генератора. При этом магнитный поток и, следовательно, ЭДС якоря увеличиваются в меньшей степени. 25 В целом, кривая х.х.х. определяется нелинейными свойствами стального магнитопровода и соответствует виду кривой намагничивания стали. Точка номинального режима работы находится в месте изгиба кривой. Внешняя характеристика Напряжение на зажимах генератора зависит от режима работы. В частности, оно меняется с изменением величины нагрузки. Внешняя характеристика это зависимость напряжения на зажимах генератора от тока в приемнике (тока якоря) при неизменном токе возбуждения (магнитном потоке Фв) и частоте вращения n. В генераторе независимого возбуждения ток приемника равен току якоря Iп = Iя . (30) Напряжение на зажимах генератора связано с током якоря уравнением электрического состояния (7) из которого следует, что напряжение меньше ЭДС на величину падения напряжения в обмотке якоря: U = E я − Rя I я . (31) С ростом Iя это падение напряжения возрастает и напряжение на зажимах генератора уменьшается. Графически эта зависимость изображается кривой 1 на рис. 18. Рис. 18. Внешние характеристики генераторов постоянного тока 26 В генераторе с параллельным возбуждением внешняя характеристика отличается от рассмотренной выше. Здесь кроме падения напряжения на сопротивлении Rя сказывается еще один фактор. Поскольку обмотка возбуждения питается от зажимов якоря генератора, то снижение напряжения на зажимах якоря уменьшает ток возбуждения и, следовательно, магнитный поток. Это дополнительно снижает ЭДС и напряжение (кривая 2 на рис. 18). При определенном токе якоря, называемом критическим, генератор переходит в неустойчивый режим саморазмагничивания. В номинальном режиме работы напряжение на зажимах генератора меньше ЭДС Eя на 3÷8% при независимом возбуждении и на 8÷15% при параллельном возбуждении. Внешняя характеристика генератора смешанного возбуждения зависит от взаимного включения параллельной и последовательной обмоток возбуждения. При согласном включении обмоток внешняя характеристика жесткая (кривая 3), при встречном включении – мягкая (кривая 4). Регулировочная характеристика генератора постоянного тока Внешняя характеристика свидетельствует о том, что с изменением нагрузки напряжение генератора меняется. Нестабильность напряжения может неблагоприятно сказаться на приемниках электроэнергии. Поэтому напряжение на зажимах генератора необходимо поддерживать неизменным. Это осуществляется регулированием тока возбуждения. Зависимость тока возбуждения от тока якоря, при неизменном напряжении на зажимах генератора и постоянной частоте вращения – это регулировочная характеристика. Она показывает как необходимо регулировать ток возбуждения чтобы поддерживать напряжение на зажимах генератора неизменным при изменении нагрузки. Как видно на внешней характеристике, с увеличением тока якоря напряжение уменьшается. Чтобы поднять его до прежнего уровня, надо увеличить ЭДС в обмотке якоря. Для этого необходимо увеличить магнитный поток воз27 буждения за счет увеличения тока возбуждения Iв. Таким образом, с увеличением тока якоря (увеличением нагрузки генератора) ток возбуждения необходимо тоже увеличивать. График этой зависимости показан на рис. 19. Рис. 19. Регулировочные характеристики генераторов постоянного тока: 1 – с независимым возбуждением, 2 – с параллельным возбуждением Характеристика генератора параллельного возбуждения выше, т.к. в этом генераторе с увеличением нагрузки напряжение уменьшается в большей степени, чем при независимом возбуждении, и требуется в большей степени увеличивать ток возбуждения. 10. Эксплуатационные характеристики двигателей постоянного тока Механическая характеристика двигателя постоянного тока С изменением момента нагрузки на валу двигателя изменяется его режим работы. При этом меняется частота вращения. Зависимость частоты вращения n от момента нагрузки на валу M называется механической характеристикой двигателя (n=f(M)). Для анализа этой зависимости необходимо использовать аналитические выражения, определяющие ЭДС обмотки якоря (20), электромагнитный вращающий момент (14) и уравнение электрического состояния цепи якоря двигателя постоянного тока (4): 28 E я = C e Фв n ; (32) M эм = C М I я Фв ; (33) U = E я + I я Rя . (34) Предположим, что при работе двигателя момент сопротивления нагрузки возрос и стал больше момента, развиваемого двигателем. При этом двигатель тормозится, т.е. частота вращения уменьшается. Тогда ЭДС в обмотке якоря, пропорциональная частоте вращения в соответствии с (32), тоже уменьшается. Это приводит к изменению тока якоря. Исходя из уравнения электрического состояния (34) Iя = U − Eя , Rя (35) Таким образом, при неизменных напряжении источника и сопротивлении цепи якоря уменьшение частоты вращения приводит к уменьшению противоЭДС и увеличению тока якоря. В соответствии с (33) увеличение тока якоря обусловливает возрастание электромагнитного момента, развиваемого двигателем. Такое изменение режима работы происходит до тех пор, пока вращающий момент двигателя достигнет значения, равного тормозному моменту сопротивления. При этом двигатель работает в новом установившемся режиме с постоянной частотой вращения, меньшей, чем исходная, но с увеличенным вращающим моментом. Описанный процесс определяет важное свойство двигателя постоянного тока – саморегулирование, то есть способность развивать вращающий момент, равный изменяющемуся моменту сопротивления нагрузки, при этом автоматически изменять частоту вращения. Таким образом, с увеличением момента M на валу двигателя частота вращения n уменьшается. Для количественной оценки соотношения частоты вращения и момента пользуются аналитическим выражением механической характеристики. Исходя из (32): 29 n= Eя . C e Фв (36) Выражая Eя из уравнения электрического состояния (34), получим: n= U − Rя I я . C e Фв (37) Ток якоря определяется моментом на валу из (33): Iя = M . C M Фв (38) Тогда выражение механической характеристики принимает вид: n= Rя U − M. C e Фв C e C M Фв2 (39) Как видно, при неизменных напряжении источника и магнитном потоке (токе возбуждения) с увеличением момента M на валу двигателя частота вращения n уменьшается. Вид механической характеристики существенно зависит от способа возбуждения машины. При независимом и параллельном возбуждении магнитный поток Фв практически не меняется и график механической характеристики имеет вид прямой линии (кривая 1 на рис. 20). Рис. 20. Механические характеристики двигателей постоянного тока 30 Характеристика может быть определена двумя крайними точками: точкой холостого хода и точкой, соответствующей режиму пуска. В режиме холостого хода момент М=0, а частота вращения максимальна (n=n0). При пуске частота вращения равна нулю (n=0), а момент максимален и равен пусковому моменту (M=Mпуск). Частота вращения холостого хода определяется из выражения (39) при М=0: n0 = U , C е Фв (40) а пусковой момент при n=0: M пуск = С M I пускФв = C M U Фв . Rя (41) График механической характеристики – прямая линия, проведенная через эти две точки. Рабочий диапазон механической характеристики ограничивается номинальным моментом Mном. При изменении момента от М=0 до М=Мном частота вращения меняется незначительно, то есть характеристика является жесткой. В двигателе с последовательным возбуждением поток возбуждения меняется с изменением тока якоря, а значит, с изменением момента. При этом механическая характеристика имеет вид гиперболы (кривая 2 на рис. 20). Механическая характеристика ДПТ смешанного возбуждения (кривая 3) занимает промежуточное положение между кривыми 1 и 2. Пуск двигателя постоянного тока Особенность пуска двигателя постоянного тока – сильное превышение пускового тока якоря над номинальным значением. Это объясняется тем, что в момент пуска, когда частота вращения равна нулю, противоЭДС в обмотке якоря не индуцируется. Как следует из выражения для ЭДС обмотки якоря (32), при n=0 E я = C e Фв n = 0 . (42) В соответствии с уравнением электрического состояния цепи якоря (34) 31 при Eя = 0 пусковой ток якоря Iя,пуск определяется полным напряжением источника и небольшим сопротивлением обмотки якоря и значительно больше номинального: I я,пуск = U > I я,ном . Rя (43) При этом двигатель развивает большой пусковой момент: М пуск = С М Фв I я,пуск > М ном . (44) Большой пусковой момент играет положительную роль, т.к. уменьшает время пуска. Однако, значительный пусковой ток ( I я,пуск = ( 8 ÷ 10 )I я,ном ) мо- жет привести к перегреву и разрушению обмотки. Для ограничения пускового тока в цепь якоря включают пусковой реостат с сопротивлением Rп (рис. 21). Тогда пусковой ток I я,пуск = U . R я + Rп (45) Рис. 21. Схема включения двигателя независимого возбуждения при пуске Величина Rп выбирается такой, чтобы ток якоря не превышал кратковременно допустимого значения: I я,пуск = ( 2 ÷ 2,5 )I я,ном . (46) По мере разгона двигателя до номинальной частоты вращения пусковой 32 реостат выводится до нуля и ток якоря становится равным номинальному. Другой способ ограничения пускового тока – уменьшение напряжения питания в цепи якоря. Для этого якорь ДПТ подключается к источнику регулируемого напряжения. По мере разгона двигателя напряжение увеличивают (вручную, или автоматически) от нуля до номинального значения. Регулирование частоты вращения двигателя постоянного тока Для анализа способов регулирования частоты вращения обратимся к уравнению механической характеристики ДПТ (39). Как видно, при неизменном моменте на валу можно регулировать частоту вращения тремя способами: изменением магнитного потока Фв, изменением сопротивления в цепи якоря Rя и изменением напряжения U, приложенного к якорю. Механическая характеристика при номинальном токе возбуждения и номинальном напряжении якоря называется естественной механической характеристикой. Способ регулирования изменением магнитного потока Фв называется полюсным регулированием. Магнитный поток возбуждения меняется путем регулирования тока возбуждения. Для этого в цепь обмотки возбуждения включается регулировочный реостат (Rр на рис. 21) или регулятор напряжения. В соответствии с (40) с уменьшением тока возбуждения частота вращения холостого хода увеличивается. Эта зависимость называется регулировочной характеристикой и показана графически на рис. 22. Рис. 22. Регулировочная характеристика ДПТ 33 Пусковой момент согласно (44) пропорционален магнитному потоку. Поэтому с уменьшением тока возбуждения пусковой момент также уменьшается. Искусственные механические характеристики, соответствующие разным значениям магнитного потока, показаны на рис. 23. Рис. 23. Искусственные механические характеристики ДПТ при полюсном регулировании. В области номинального момента с уменьшением магнитного потока частота вращения возрастает. Как видно из уравнения механической характеристики (39), при стремлении Фв к нулю частота вращения якоря резко увеличивается. Это может происходить при размыкании (обрыве) обмотки возбуждения и привести к разрушению якоря и коллектора центробежными силами. Поэтому обрыв обмотки возбуждения двигателя постоянного тока является для него аварийным режимом. Полюсное регулирование является удобным и экономичным, т.к. ток возбуждения весьма мал по сравнению с током якоря, а размеры регулировочного реостата и потери в нем невелики. Однако, этот способ не позволяет уменьшать частоту вращения ниже номинальной, т.к. увеличение тока возбуждения приводит к перегреву обмотки возбуждения и выходу ее из строя. Кроме того, увеличение магнитного потока ограничено насыщением стального магнитопровода. 34 Способ регулирования изменением сопротивления в цепи якоря называется реостатным регулированием. С этой целю в цепь якоря включается добавочное сопротивление Rд подобно пусковому реостату. С учетом сопротивления добавочного реостата ток якоря уменьшается: Iя = U − Eя . R я + Rд (47) Согласно (33) это уменьшает момент, развиваемый двигателем. Зависимость частоты вращения n от сопротивления в цепи якоря определяется выражением, аналогичным (39), в котором вместо сопротивления обмотки якоря стоит суммарное сопротивление цепи якоря: n= R я + Rд U − M. C e Фв C C Ф 2 e M в (48) На рис. 24 изображены механические характеристики: естественная и реостатные при различных значениях Rд . Рис. 24. Реостатные механические характеристики ДПТ Как видно в (48), слагаемое, определяющее частоту вращения холостого хода, не зависит от Rд. Значит точка холостого хода на графиках является общей для всех характеристик. 35 Пусковой момент согласно выражению (44) уменьшается с введением добавочного резистора: M пуск = С М U Фв . R я + Rд (49) Реостатное регулирование позволяет менять частоту вращения от номинальной до нуля, как видно на рис. 24. Однако, этот способ связан с большими потерями мощности на добавочном резисторе, поэтому применяется для двигателей малой и средней мощности. Регулирование напряжением на обмотке якоря называется якорным регулированием. Якорное регулирование может применяться для двигателя с неза- висимым возбуждением, т.к. при параллельном возбуждении изменение напряжения обусловливает и изменение магнитного потока. Для якорного регулирования обмотка якоря двигателя питается от регулируемого источника напряжения, например, полупроводникового преобразователя. С увеличением напряжения источника U возрастает ток якоря и момент двигателя. Электромагнитный момент двигателя становится больше момента нагрузки и двигатель разгоняется, т.е. частота вращения увеличивается. При этом возрастает противоЭДС в обмотке якоря Eя, а ток Iя , исходя из уравнения электрического состояния (34), уменьшается. При этом уменьшается электромагнитный момент двигателя. Так происходит до тех пор, пока электромагнитный момент двигателя не сравняется с моментом нагрузки ( М = М сопр ), и двигатель снова работает в установившемся режиме, но с увеличенной частотой вращения. Аналитически зависимость частоты вращения от напряжения источника определяется уравнением механической характеристики (39). Частота вращения холостого хода n0 и пусковой момент M0 пропорциональны напряжению U. Графики механических характеристик при разном напряжении – параллельные линии (рис. 25). 36 Рис. 25. Механические характеристики ДПТ при якорном регулировании Увеличение напряжения больше номинального приводит к перегреву машины. Поэтому якорное регулирование применяется для регулирования частоты вращения ниже номинальной (n<nном). Наиболее эффективно совместное использование якорного и полюсного регулирования, что позволяет обеспечить плавное регулирование частоты вращения в очень широком диапазоне. Это определяет одно из главных преимуществ двигателей постоянного тока. 11. Разновидности машин постоянного тока, их применение В связи с быстрым развитием полупроводниковой техники, в частности, полупроводниковых выпрямителей, роль машин постоянного тока как источников электроэнергии несколько снизилась. Тем не менее, применения машин постоянного тока достаточно обширны. Они находят применение в качестве источников питания регулируемых электроприводов постоянного тока (приводы прокатных станов, экскаваторов, подъемно-транспортных машин), электролизных и гальванических установок в металлургии и химии. Во многих случаях 37 генераторы постоянного тока используются в качестве возбудителей синхронных машин для питания их обмоток возбуждения. Широко распространены генераторы постоянного тока как источники электрической энергии в автономных транспортных средствах, судах и летательных аппаратах. Это во многом объясняется возможностью их параллельной работы с резервными источниками на транспортных средствах – аккумуляторами. Генераторы постоянного тока смешанного возбуждения, имеющие падающую внешнюю характеристику, используются для электросварки. Распространение двигателей постоянного тока обусловлено возможностью глубокого и плавного регулирования частоты вращения и получения желаемых механических характеристик, возможностью работы при низкой частоте вращения с достаточно высоким к.п.д., а также большим пусковым моментом и перегрузочной способностью. Двигатель с независимым и смешанным (согласное включение) возбуждением, имеющие жесткие механические характеристики, применяются в регулируемых металлургических электроприводах, например, в приводах валков прокатных станов. Крупные двигатели постоянного тока приводят во вращение гребные винты на судах и мотор-колеса на большегрузных автомобилях, имеющих электрическую передачу энергии от силовой установки. В большинстве транспортных средств, судов, летательных аппаратов вспомогательные устройства приводятся в действие электродвигателями постоянного тока. Двигатели постоянного тока последовательного и смешанного возбуждения имеют мягкие механические характеристики. Они находят применение в качестве тяговых двигателей электровозов, тепловозов, трамваев, троллейбусов и т.п., где требуется большой пусковой момент для преодоления инерции больших масс при трогании и небольшой момент при движении на высоких скоростях. Такие же свойства двигателей постоянного тока используются в приводах подъемно-транспортных устройств (краны, лифты) и экскаваторов. Кроме рассмотренных машин постоянного тока общепромышленного применения существуют множество специальных машин. Они имеют существенные особенности конструкции, но по характеру происходящих преобразова38 ний энергии относятся к типу машин постоянного тока. Можно отметить некоторые из них. Например, в машинах постоянного тока малой мощности (от долей ватта до десятков-сотен ватт) для создания магнитного поля возбуждения могут применяться постоянные магнитны. Генераторы постоянного тока с возбуждением от постоянных магнитов чаще всего используются как датчики частоты вращения – тахогенераторы. Двигатели постоянного тока с постоянными магнитами находят применение в качестве исполнительных двигателей в системах автоматики. В униполярных (одноименнополюсных) машинах постоянного тока кольцевые обмотки возбуждения располагаются концентрически вокруг якоря таким образом, чтобы магнитный поток в активной зоне машины имел бы одно и то же направление (а не чередующееся, как в обычной машине). При этом ЭДС, индуцируемые в проводниках якоря также имеют одно направление, а токосъем с якорной обмотки осуществляется с помощью щеток и контактных колец, а не коллектора. Униполярные машины постоянного тока отличаются высоким КПД и применяются в качестве источников больших токов до 150 кА. Униполярные генераторы – наиболее подходящие источники питания для мощных электролизных установок. Перспективными являются и такие машины постоянного тока как магнитогидродинамические генераторы (МГД-генератор). По каналу, расположенному между полюсами такой машины, пропускается проводящая жидкость или газ (плазма). Под действием магнитного поля возбуждения в движущейся проводящей среде индуцируется ЭДС, которая включается в электрическую цепь с помощью электродов, закрепленных на стенках канала. Применение МГД-генераторов как приставки на тепловых и атомных электростанциях позволяет повысить к.п.д. станции с 40÷43% до 45÷50%. В качестве рабочей проводящей среды в таких МГД-генераторах используется ионизированная плазма, получаемая при сжигании обычного топлива или путем нагревания газа в атомных реакторах. Как и всякая электрическая машина, МГД-машина обратима. МГД39 двигатели используются в качестве электромагнитных насосов для перекачки жидкометаллических теплоносителей в ядерных реакторах. Плазменный МГДдвигатель рассматривается как вариант двигателя вспомогательных устройств космических кораблей. В качестве перспективных конструкций двигателей постоянного тока можно отметить также беспазовые двигатели и двигатели с печатной обмоткой. Они обладают высокой надежностью и быстродействием и могут использоваться в качестве исполнительных двигателей робототехнических систем. 40 Учебное электронное текстовое издание Проскуряков Валерий Степанович Соболев Сергей Владимирович Электротехника Электрические машины постоянного тока Учебное пособие Рекомендовано РИС ГОУ ВПО УГТУ-УПИ Электронный формат – PDF Формат 60х90 1/8 Объем 2,85 уч.-изд. л. Издательство ГОУ-ВПО УГТУ-УПИ 620002, Екатеринбург, ул. Мира, 19 e-mail: vpros@mail.ru Информационный портал ГОУ ВПО УГТУ-УПИ http://www.ustu.ru 41