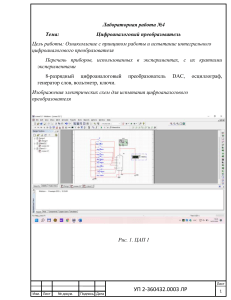
Аннотация Контрольная работа 24 с., 3 рис., 4 табл., 7 источников. ЗВЕНО, СТОЙКА, КРИВОШИП, ПОЛЗУН, ЗУБЧАТАЯ ПЕРЕДАЧА, ЭВОЛЬВЕНТА, МОДУЛЬ. Целью курсовой работы является получение практических навыков и закрепление теоретических знаний по вопросам основных разделов курса «Теория механизмов и машин», а именно: структурного и кинематического анализа плоских рычажных механизмов; синтеза эвольвентного зацепления зубчатого механизма внешнего зацепления с параллельно расположенными осями. КР.510680.23.05.03.1123ПЗ Изм. Лист № докум. Подп. Дата Разраб. Снегирев Н.В. Лит. Лист Листов Проверил Ильиных В.А. У 2 24 Консультант Нормоконтр . Утвердил ТЕОРИЯ МЕХАНИЗМОВ И МАШИН ЗабИЖТ ИрГУПС ПСЖ 6-20-1 Содержание Введение 4 Задание на курсовую работу 5 1 Структурный анализ механизма 6 2 Кинематический анализ механизма 9 3 Проектирование зубчатого зацепления передачи 16 Содержание 23 Список использованных источников 24 Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 3 Введение Теория Машин и Механизмов, наука об общих методах исследования и проектирования машин и механизмов. Наиболее развита часть науки, называемая теорией механизмов, в которой изучаются преимущественно свойства механизмов, являющиеся общими для всех (или для определённых групп) механизмов независимо от конкретного назначения машины, прибора или аппарата. Например, один и тот же механизм для преобразования вращательного движения, выполненный в виде зубчатых колёс, может применяться в автомобиле, часах, мешалках аппаратов химического производства. Во всех указанных случаях требуется одно и то же преобразование движения, поэтому методы исследования и проектирования этих механизмов имеют много общего и составляют содержание теории механизмов. Другую часть науки составляет теория машин, в которой рассматриваются методы исследования и проектирования, являющиеся общими для машин различных областей техники. Обе части науки неразрывно связаны между собой, так как механизмы составляют основу почти любой машины. Проектирование, изготовление и правильная эксплуатация механизмов предполагают знание физических процессов, положенных в основу работы устройств, применяемых способов расчёта, принципа конструирования узлов и деталей. Каждый механизм состоит из большого количества деталей, определенным способом соединённых между собой. Длительность их функционирования зависит от конструктивной формы, точности изготовления, материала и других факторов. При создании любых механизмов нужно уделять внимание вопросам технологичности и экономичности. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 4 Задание на курсовую работу Размеры звеньев рычажного механизма Частота вращения коленчатого вала Положение кривошипа Числа зубьев колес передачи Модуль колес передачи Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 5 1 Структурный анализ механизма Подвижно соединенные между собой части механизма называются звеньями. В механизме различают неподвижное звено и подвижные звенья, которые могут совершать поступательное и вращательное движения. Структурно-кинематической схемой механизма называется условное изображение взаимосвязанных неподвижных звеньев, выполненное в принятом стандартном масштабе длин с принятием условных обозначений кинематических пар. На рисунке представлен механизм шарнирного трезвенника, тип которого определяется количеством, формой и взаимным расположением звеньев. Рисунок 1 – Кинематическая схема пятизвенного рычажного механизма Определение ступени движения механизма: Ступень движения механизма определим по уравнению Чебышева (1.1) где: – количество движущихся звеньев механизма; – количество кинематических пар 4-го и 5-го классов. Для механизма, что исследуется, количество движущихся звеньев , Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 6 кинематических пар 5-го класса , кинематические пары 4-го класса . Определяем классификацию звеньев и кинематических пар для этого составляем таблицу Таблица 1 – Классификация звеньев и кинематических Обозначение кинематической пары О А В С D А D Звенья входящие в состав кинематической пары 1,6 1,2 3,7 3,4 4,5 2,3 5,8 Тип пары и ее класс вращательная, V вращательная, V вращательная, V вращательная, V вращательная, V поступательная, V поступательная, V Имеем: Для работы механизму необходима только одно ведущее звено, так как ступень движимости равна единице. Выделение групп Ассура: Простейшая группа Ассура представляет собой сочетание двух звеньев и трех кинематических пар. Порядок групп Асура, входящих в состав механизма, определяется по количеству поводков, которыми данная группа крепится. У этого механизма ведущим звеном является звено 1. Рисунок 2 – Первая группа Асура. Является двухповодковои группой, относится ко II классу, III виду Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 7 Рисунок 3 – Вторая группа Асура. Является двухповодковои группой, относится ко II классу, II виду Группа Асура 1 класса или условная группы состоит из кривошипа ОА и стойки. Структурная формула имеет вид: Класс и порядок механизма определяется классом и порядком наиболее сложной группы Ассура, входящей в механизм. На основе проведенного исследования можно заключить, что данный механизм является механизмом первого класса, второго порядка. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 8 2 Кинематический анализ механизма 2.1 Определение скоростей точек звеньев механизма Планом скоростей называется диаграмма, на которой изображены векторы скоростей точек плоского механизма. Для определения скоростей точек и звеньев механизма воспользуемся методом планов скоростей. Построение планов скоростей начинаем со скорости точки А ведущего звена ОА. Учитывая, что скорость ведущего звена известна, скорость точки А1 определим из уравнения где – длина звена ОА, м – угловая скорость звена 1, с-1. Вектор направлен перпендикулярно звену ОА. От произвольно взятой точки P (полюса плана скоростей) отложим вектор произвольной длины, что численно равен вектору скорости. Масштабный коэффициент скорости где: определим из уравнения – скорость точки A, м /с; – длина вектора Для определения скорости , мм. точки А составляем векторное уравнение, связывающие векторы скоростей точек при плоском движении звена 2: Вектор скорости точки С направлен перпендикулярно звену ВС, вектор Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 9 скорости звена 2 направлен перпендикулярно ВС. Для определения действительной величины любого из полученных векторов достаточно умножить соответствующий отрезок на масштаб плана скоростей . Тогда: Скорость точки С найдем по теореме подобия Вектор скорости точки D направлен вдоль оси движения ползуна (звено 5), вектор скорости звена 4 направлен перпендикулярно СD. Для определения действительной величины любого из полученных векторов достаточно умножить соответствующий отрезок на масштаб плана скоростей . Тогда: 2.2 Определение угловых скоростей звеньев механизма Угловые скорости вращения звеньев определяются на основе построенного плана скоростей. Модуль угловой скорости второго звена можно найти по формуле: Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 10 Для определения направления относительной скорости , мысленно переносим вектор в точку C механизма. Направление вектора скорости указывает, что звено АC вращается по часовой стрелке. Аналогично определяем модуль и направление угловой скорости звена 4: Для определения направления скорости мысленно переносим вектор относительной в точку D механизма. Направление вектора скорости указывает, что звено CD вращается по часовой стрелке. 2.3 Определение ускорений точек звеньев механизма Для определения ускорений точек и звеньев механизма воспользуемся методом планов ускорений. Построение планов ускорений начинаем с ведущего звена механизма. При вращательном движении звена ускорение любой точки можно представить в виде векторной суммы двух составляющих: нормальной и тангенциальной. Поэтому для определения ускорения точки А напишем векторное уравнение Поскольку , то: Следовательно, в этом частном случае полное ускорение a A точки А определяется только величиной нормального ускорения , которое по модулю равно: и направлено параллельно звену ОА от точки А к точке О. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 11 где ; м/с – ускорение Кориолиса направлено параллельно звену AB от точки А к точке B. Рассматривая точку D, как принадлежащую одновременно звеньям 4 и 5, ускорение точки D может быть представлено в виде векторного уравнения: Вектор ускорения точки D направлен параллельно оси ползуна. Величины нормальных составляющих относительных ускорений Вектор нормальной составляющей направлен вдоль звена CD от точки D к точке C. Тангенциальная составляющая ускорения по абсолютной величине неизвестна, но известна по направлению. Таким образом, векторное уравнение представляет собой уравнение с двумя неизвестными, которое может быть решено графическим методом с помощью построения плана ускорений. Масштабный коэффициент плана ускорений будет равен: Для определения действительной величины любого из полученных векторов Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 12 достаточно умножить соответствующий отрезок на масштаб плана скоростей K a . Тогда: Вектор ускорения повернут на угол 180° относительно вектора ускорения . 2.4 Определение угловых ускорений звеньев механизма Угловое ускорение , звена 3. Для определения направления углового ускорения вектор тангенциальной составляющей ускорения Угловое ускорение , мысленно переносим в точку А механизма. , звена 4 Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 13 Для определения направления углового ускорения вектор тангенциальной составляющей ускорения , мысленно переносим в точку D механизма. Таблица 2 – Численные значения линейных скоростей и ускорений Кинематическая пара О А1 А С D Скорость 0 1,9 1,86 1,32 0,82 Ускорение 0 27,8 22 17 6,5 Таблица 3 – Численные значения линейных скоростей и ускорений Звено АВ ВС СD А D Скорость 0 0 0,9 1,86 0,82 Ускорение 0 0 16 22 6,5 Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 14 3 Проектирование зубчатого зацепления передачи 3.1 Расчет геометрических параметров зубчатого зацепления Делительное межосевое расстояние: Тип расчёта коэффициентов смещения исходного контура определятся по последней цифре зачётной книжки: 2) при нечётной цифре - значения и вычисляются из условия неподрезания: для случая получаем Коэффициент суммы смещений Угол зацепления где invaw, inva – инволюты (эвольвентные функции) угла зацепления передачи и угла профиля исходного контура соответственно. Инволюты углов находить по таблице инволют ([1] Приложение 2) с точностью до пяти значащих цифр. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 15 Межосевое расстояние 3.2 Расчет диаметров зубчатых колес Делительный диаметр Передаточное число Начальный диаметр Коэффициент воспринимаемого смещения т.к. передача положительная Основной диаметр Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 16 Коэффициент уравнительного смещения Рассматривая станочное зацепление (то есть зацепление, образованное заготовкой колеса и инструментом, при изготовлении зубчатого колеса на зубообрабатывающем оборудовании по способу обката), было введено понятие уравнительного смещения , где – коэффициент уравнительного смещения, обеспечивающий стандартный радиальный зазор в зацеплении. Уравнительное смещение – условная расчётная величина, введенная в расчёт геометрии зацепления с целью обеспечения стандартного радиального зазора в зацеплении (величина, выражающая в долях модуля уменьшение радиуса окружностей вершин колёс, необходимое для обеспечения стандартной величины радиального зазора). Увеличивая коэффициенты смещения каждого колеса и их суммы, можно повысить контактную прочность передачи, так как при этом уменьшаются коэффициенты удельного давления; повысить износостойкость колёс и уменьшить их склонность к заеданию, так как уменьшаются коэффициенты скольжения; увеличить изгибную прочность зубьев, так как увеличивается коэффициент формы зуба. Но, с другой стороны, с увеличением коэффициентов смещения уменьшается коэффициент перекрытия. Выбирая расчётные коэффициенты смещения, следует учитывать конкретные условия работы. Диаметр вершин зубьев: Диаметр впадин Толщина зуба по дуге делительной окружности Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 17 Угловой шаг 3.3 Расчет размеров для контроля зубчатых колес Постоянная хорда Высота до постоянной хорды 3.4 Расчет длины общей нормали Угол профиля в точке концентрической окружности диаметра Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 18 Расчетное число зубьев в длине общей нормали Длина общей нормали где – округленное до ближайшего целого значения Угол профиля зуба в точке на окружности вершин Коэффициент торцового перекрытия 3.5 Построение картины эвольвентного зацепления Вначале выбираем масштаб построения. Масштаб следует выбирать таким, чтобы высота зуба составляла 40…50 мм. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 19 На листе откладываем в выбранном масштабе межосевое расстояние . Через центры делительные окружности и основные проводим начальные окружности , окружности впадин и вершин зубьев . Точка касания начальных окружностей находится на линии межосевого расстояния и является полюсом зацепления Р. Через полюс зацепления Р проводим линию зацепления, которая должна быть касательной к основным окружностям колеса. Точки касания обозначим N1, и N2 Рекомендуется следующий порядок построения эвольвентного профиля (рис. 1.1.): 1. Произвольным раствором циркуля от точки N2 в обе стороны откладываем равные расстояния на основной окружности и на линии зацепления. Получаем точки: на основной окружности - 1, 2, 3, ..., а, б, в,..., на линии зацепления - 1', 2', 3',..., а', б', в', ... . 2. Строим касательные к основной окружности в точках 1, 2, 3 а, б, в 3. На полученных касательных откладываем отрезки, равные расстояниям отточки Р до соответствующих точек линии зацепления: Из точки 1 расстояние р-1'. Из точки 2 расстояние р- 2' и т. д. 4. Полученные точки соединяем плавной кривой - это будет эвольвентный профиль зуба. Эвольвента должна быть построена до окружности вершин колеса. 5. При построении картины зацепления оставлять на чертеже все вспомогательные построения. Неэвольвентную часть зуба (от основной окружности впадин) очертить вначале по радиусу, а затем сделать округление радиусом r=(0,25-0,4)/m. 6. Отложить по дуге делительной окружности половину толщины зуба s1. Через полученную точку провести ось симметрии зуба. Через угловой шаг Ti показать оси симметрии зубьев обоих колёс. Профили зубьев зацепляющихся колёс могут быть построены по шаблонам, либо с помощью кальки. 3.6 Качественные показатели зубчатого зацепления и размеры, необходимые Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 20 для контроля зубчатых колес Коэффициент перекрытия характеризует плавность работы зубчатой передачи. Графически коэффициент перекрытия определяется отношением длины рабочей линии зацепления k1k2 к шагу по нормали рn В эвольвентном зацеплении удельное скольжение определяется выражениями: где РК – расстояние по линии зацепления от полюса (Р) до точки контакта профилей (К); , N2K2 - радиусы кривизны эвольвентных профилей ведущего и ведомого колёс в точке контакта К; - число зубьев шестерни и колеса По этим формулам на чертеже строятся графики удельных скольжений для обоих колёс. Графики рекомендуется построить в координатах: высота зуба h, удельное скольжение , приняв ось h на линии симметрии зуба, а ось перпендикулярно оси h. Для построения графика взять три точки на головке зуба, в полюсе и на ножке. На чертеже также необходимо определить сопряжённые участки профилей. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 21 Для этого рабочую линию зацепления разделить на 5-6 равных частей (рис. 1.2). Сопряжённые точки на профилях получим, снося точки 1, 2, 3 с линии зацепления на профиль , первого дугами окружностей радиусов , , на профиль зуба второго колеса - дугами окружностей , радиусов колеса , , . Полученные сопряжённые участки , следует выделить. Постоянная хорда Sc - размер зуба, который зависит только от модуля зацепления и величины коэффициента смещения, и не зависит от числа зубьев. Для графического определения постоянной хорды необходимо из точки пересечения оси симметрии зуба с делительной окружностью М восстановить нормали к правому и левому профилям зуба, которые будут касательными к основной окружности. Постоянная хорда определится как расстояние между точками пересечения этих касательных с профилями зуба. Высота зуба до постоянной хорды hc графически определится при определении Sc. Длина общей нормали W - расстояние между разноимёнными профилями, измеренное по общей касательной к основной окружности. Для графического определения длины общей нормали проводим касательную к основной окружности с таким расчётом, чтобы она захватывала наибольшее количество зубьев. Замерив расстояние между противоположными профилями крайних зубьев, вошедших в общую нормаль, получим длину общей нормали IV. Значения показателей зубчатой передачи, определённые аналитически и графически, оформляем в таблицу. Таблица 4 – Параметры показателей зубчатой передачи №п/п Параметр 1 2 3 4 Численное значение графически аналитически 1,31 5,55 2,86 30,75 Расхождение, % 1,304 5,56 2,85 30,7 0,45 0,18 0,34 0,16 Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 22 Заключение Цель расчетно-графической работы – закрепление теоретических знаний, что были получены во время изучения курса «ТММ», ознакомление с методами проектирования механизмов. Первый этап конструирования любого механизма – это составление его кинематической схемы, расчет кинематических параметров, определение нагрузки различных деталей и энергетических характеристик механизма в целом. Выполняя расчетно-графическую работу по ТММ, овладел методами определения кинематических параметров механизмов, оценки сил, что действуют на отдельные звенья механизма, научился творчески оценивать сконструированный механизм с точки зрения его назначения – обеспечивать необходимые параметры движения звена. Произведен расчет эвольвентного зацепления зубчатой передачи. Выполнен чертеж профиля зуба шестерни и колеса. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 23 Список использованных источников 1. Артоболевский, И. И. Теория механизмов и машин: учеб для втузов / И.И.Артоболевский. - 5-е изд., перераб. и доп. - М.: Наука. Гл. ред. физ.-мат. лит., 2011. 640 с. 2. Вульфсон, И. И. Геометрические характеристики эвольвентных зубчатых передач: учеб. пособие для втузов / И. И. Вульфсон, Т. С. Грибкова, И. А. Шарапин. - СПб.: СПГУТД, 2003. - 65 с. 3. Капшунов, В. В. Синтез эвольвентного зубчатого зацепления: методические указания по выполнению курсовой работы по дисциплине «Теория механизмов и машин» для студентов очной и заочной форм обучения инженерно-технических специальностей. – Чита: ЗабИЖТ, 2018. – 22 с. 4. Капшунов, В. В., Ильиных, В. А. Структурный и кинематический анализ плоского рычажного механизма: методические указания по выполнению курсовой работы по дисциплине «Теория механизмов и машин» для студентов очной и заочной форм обучения инженернотехнических специальностей. – Чита: ЗабИЖТ, 2016. – 22 с. 5. Попов, С. А. Курсовое проектирование по теории механизмов и механике машин: учеб. пособие для втузов / С. А. Попов, Г. А. Тимофеев, под ред. К. В. Фролова. - 2-е изд., перераб. и доп. - М.: Высшая школ;), 1998.-351 с: ил. 6. Смелягин, А. И. Структура механизмов и машин: учебное пособие/А. И. Смелягин. - М.: ИНФРА-М; Новосибирск: Изд-во HГТУ, 2001 286 с. 7. Фролов, К. В. Теория механизмов и механика машин: учебник для высших техн. учебн. заведений / К. В. Фролов, А. К. Мусатов, С. А. Попов. - 4-е изд., испр. / 5-е стереотип. - М.: Высшая школа, 2001 - 496 с. Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 24 Лист Изм Лист . КР.510680.23.05.03.1123ПЗ № докум Подпись Дата 25