Министерство образования и науки Алтайского края краевое государственное
бюджетное профессиональное образовательное учреждение
«Рубцовский аграрно-промышленный техникум»
Электрические Машины
.
наименование учебной дисциплины
ВНЕАУДИТОРНАЯ САМОСТОЯТЕЛЬНАЯ РАБОТА
Карлин Сергей Александрович
фамилия, имя, отчество студента
080209 Монтаж, наладка и эксплуатация электрооборудования
гражданских и промышленных зданий
(специальность)
Аненкова Надежда Евгеньевна
фамилия, имя, отчество преподавателя
_____________________________________________________________________________________
подпись преподавателя
Группа 221 МЭП
Содержание
Самостоятельная работа № 1 Тема 1.1.1 Принцип действия и устройство
коллекторных машин постоянного тока.
Самостоятельная работа № 2 Тема 1.1.2 Обмотки якоря коллекторных машин
постоянного тока
Самостоятельная работа № 3 Тема 1.1.3 Магнитное поле машин постоянного тока
Самостоятельная работа № 4 Тема 1.1.4 Коммутация в машинах постоянного тока
Самостоятельная работа № 5 Тема 1.1.5 Коллекторные генераторы
Самостоятельная работа № 6 Тема 1.1.6 Коллекторные двигатели
Самостоятельная работа № 7 Тема 1.2.1 Устройство и рабочий процесс
трансформаторов
Самостоятельная работа № 8 Тема 1.2.2 Схемы, группы соединения обмоток и
параллельная работа трансформаторов
Самостоятельная работа № 9 Тема 1.2.3 Автотрансформаторы и трехобмоточные
трансформаторы
Самостоятельная работа № 10 Тема 1.2.4 Переходные процессы в трансформаторах
Самостоятельная работа № 11 Тема 1.2.5 Трансформаторы специального
назначения
Самостоятельная работа № 12 Тема 1.3.1 Принцип действия и устройство
бесколлекторных машин
Самостоятельная работа №13 Тема 1.3.2 Основные типы обмоток статора
бесколлекторных машин и принципы их выполнения
Самостоятельная работа №14 Тема 1.3.3 Магнитодвижущая сила обмотки статора
бесколлекторных машин
Самостоятельная работа №15 Тема 1.4.1 Режимы работы и устройство
асинхронной машины
Самостоятельная работа №16 Тема 1.4.2 Общая характеристика режимов работы
при неподвижном и вращающемся роторе
Самостоятельная работа №17 Тема 1.4.3 Схема замещения и векторная диаграмма
асинхронного двигателя
Самостоятельная работа №18 Тема 1.4.4 Электромеханические характеристики
асинхронного двигателя
Самостоятельная работа №19 Тема 1.4.5 Круговая диаграмма асинхронного
двигателя
Самостоятельная работа №20 Тема 1.4.6 Пуск и регулирование частоты вращения
трехфазных асинхронных двигателей
Самостоятельная работа №21 Тема 1.4.7 Однофазные и конденсаторные
асинхронные двигатели
Самостоятельная работа №22 Тема 1.5.1 Способы возбуждения и устройство
синхронных машин
Самостоятельная работа №23 Тема 1.5.2 Характеристики и векторные диаграммы
синхронных генераторов
Самостоятельная работа №24 Тема 1.5.3 Режимы работы синхронных генераторов,
включенных в систему
Самостоятельная работа №25 Тема 1.6.1 Асинхронные машины специального
назначения
Самостоятельная работа №26 Тема 1.6.2 Синхронные машины специального
назначения
Самостоятельная работа №27 Тема 1.6.3 Машины постоянного тока специального
назначения
Список литературы
1 Принцип действия и устройство коллекторных машин постоянного тока.
Коллекторная машина постоянного тока состоит из: Якоря (подвижная
Часть)
который состоит из вала, обмотки якоря, коллектора, двух подшипников и сердечника.
Сердечник — это цилиндр из штампованных листов электротехнической стали
толщиной 0,5 мм покрытых электроизоляционным лаком. Такая сборная конструкция
служит для уменьшения вихревых токов. В сердечнике есть пазы в которые вложены
пазовые стороны обмотки якоря.
Принцип действия. Когда ток протекает через обмотку якоря, возникает магнитное
поле, направление которого можно определить с помощью правила буравчика. Постоянное
магнитное поле статора взаимодействует с полем якоря, и он начинает вращаться благодаря
тому, что одноименные полюса отталкиваются, притягиваясь к разноимённым.
2 Обмотки якоря коллекторных машин постоянного тока
Элементом обмотки якоря является секция, которая своими концами присоединена к двум
пластинам коллектора. Секции могут быть одновитковыми и многовитковыми. Пазовые
стороны секций расположены в пазах сердечника якоря. Расстояние между пазовыми
сторонами секции приблизитеьно равно полюсному делению.
где Da — диаметр сердечника якоря.
Обычно обмотки якоря выполняют двухслойными. В зависимости от порядка
присоединения секций к пластинам коллектора обмотки разделяют на волновые и
петлевые, простые, сложные и комбинированные.
Простая волновая обмотка
В простой волновой обмотке концы каждой секции присоединены к пластинам коллектора,
находящимся на расстоянии, называемом шагом обмотки по коллектору,
где К — число коллекторных пластин в коллекторе.
На рис. 13.5 показана схема простой волновой обмотки якоря. Секции обмотки
образуют две параллельные ветви (2а = 2). Число параллельных ветвей в обмотке и число
секций в каждой ветви определяют ток Iа и ЭДС Еа обмотки якоря:
где S — количество секций в обмотке якоря; ес — ЭДС одной секции; Iс — допустимое
значение тока в секции.
Сложная волновая обмотка
Применяется в машинах постоянного тока, рассчитанных на большие токи. Сложная
волновая обмотка состоит из двух простых волновых обмоток, соединяемых щетками
параллельно (рис. 13.6). Такая обмотка содержит четыре параллельные ветви,
следовательно, ток в ней может быть увеличен в два раза, а ЭДС при этом остается прежней.
Простая петлевая обмотка
В машинах постоянного тока низкого напряжения (значительного тока) необходима
обмотка якоря с большим числом параллельных ветвей. Таким свойством обладают
петлевые обмотки. В простой петлевой обмотке якоря (рис. 13.7) каждая секция
присоединена к двум рядом лежащим коллекторным пластинам, а число параллельных
ветвей равно числу полюсов, т.е. 2а = 2р.
Сложная петлевая обмотка
При необходимости получить еще большее число параллельных ветвей применяют
сложную петлевую обмотку якоря (рис. 13.8). Такая обмотка содержит две простые
петлевые обмотки (m = 2), поэтому у нее число параллельных ветвей удвоено, т.е. 2а = 2
* 2р = 4р. Такие обмотки необходимы в машинах значительной мощности при низком
напряжении сети: 12; 24; 48 В.
Для того чтобы распределение токов в параллельных ветвях обмотки якоря было
одинаковым, необходимо, чтобы электрическое сопротивление этих ветвей не отличалось
друг от друга и чтобы ЭДС, наводимые в секциях, составляющих каждую параллельную
ветвь, были одинаковыми. При несоблюдении этих условий между параллельными ветвями
появляются уравнительные токи, нарушающие работу щеточно-коллекторного контакта.
Исключение составляет простая волновая обмотка, секции которой равномерно
распределены под всеми полюсами машины, поэтому магнитная не симметрия машины не
вызывает появления в этой обмотке уравнительных токов. Что же касается простой
петлевой и всех видов сложных обмоток якоря, то в них всегда имеются причины к
появлению уравнительных токов. Это приводит к необходимости применения в указанных
обмотках так называемых уравнительных соединений, по которым замыкаются
уравнительные токи, разгружая щеточно-коллекторный контакт от перегрузки.
Уравнительные соединения усложняют изготовление обмотки якоря и ведут к
дополнительному расходу обмоточной меди.
Комбинированная обмотка
В
электрических
машинах
со
значительным
током
в
обмотке
якоря простые волновые обмотки неприменимы, так как в этих обмотках число
параллельных ветвей не может быть более двух. Чтобы увеличить число
параллельных ветвей и избежать нежелательного применения уравнительных соединений
в машинах с большой токовой нагрузкой, используют комбинированную обмотку. Такая
обмотка состоит из секций волновой и петлевой обмоток, а число параллельных ветвей в
ней равно сумме параллельных ветвей петлевой и волновой обмоток. Необходимо, чтобы
число параллельных ветвей волновой обмотки было равно числу ветвей петлевой обмотки.
Поэтому в четырехполюсной машине комбинированную обмотку выполняют из простой
петлевой (2а = 2р = 4) и сложной волновой (m = 2) обмоток. В этом случае число
параллельных ветвей комбинированной обмотки равно 2акомб = 4 + 4 = 8. В такой обмотке
ветви одной из составляющих обмоток служат уравнительными соединениями для другой.
В итоге комбинированная обмотка с таким числом параллельных ветвей оказывается проще
сложной петлевой обмотки.
3 Магнитное поле машин постоянного тока
На холостом ходу в машине постоянного тока основной магнитный поток создается только
МДС обмотки возбуждения основных полюсов. При нагрузке, когда по обмотке якоря
протекает ток, возникает МДС якоря, взаимодействующая с основной МДС возбуждения.
Магнитный поток Ф под нагрузкой есть результирующий поток, созданный
результирующей МДС возбуждения и якоря.
Воздействие МДС якоря на основную МДС называется реакцией якоря. Реакция якоря
искажает магнитное поле, делает его несимметричным относительно оси полюсов. Для ее
анализа при ненасыщенной магнитной цепи пользуются методом наложения.
Линейная нагрузка якоря:
, где – число витков проводников обмотки;
единицу длины окружности якоря.
– ток в одном проводнике на
Так как щетки находятся на геометрической нейтрали и шаг обмотки
можно представить в виде, показанном на рисунке 4.10.
, то якорь
Рис. 4.10. МДС (1) и магнитная индукция (2) поля якоря.
Линии поля якоря располагаются вокруг осевой линии полюса симметрично по обе ее
стороны. Пусть одна из таких линий находится на расстоянии х от средней точки. Полный
ток, охватываемый этим контуром (МДС линий, составляющих магнитное поле):
.
Кривая МДС якоря представит собой ломаную линию 1 (см. рисунок 4.10), проходящую
через ось абсцисс в средней точке между щетками и достигающую максимума
каждой из щеток, т.е. при
над
. Тогда
.
Линия поля 2 раза проходит через зазор и замыкается по якорю и полюсному наконечнику.
Сопротивление стали невелико, им можно пренебречь и считать, что сопротивление линии
определяется только сопротивлением двойного зазора. Тогда
.
Поле якоря изображают в виде вектора, занимающего то или иное положение в
пространстве в зависимости от положения щеток.
Если щетки стоят по линии геометрической нейтрали, см. рисунок 4.11, в основном
положении, то поле якоря называется поперечным (направленным под углом 90° к осевой
линии основных полюсов). Наоборот, при сдвиге щеток с нейтрали па угол ±90°, (на
),
поле становится продольным по отношению к оси полюсов. Его напралвение определяется
полярностью щеток. Продольная и поперечная МДС якоря соответственно:
и
.
Рис. 4.11. МДС поперечной и продольной реакции якоря.
В общем случае щетки могут быть сдвинуты с нейтрали на угол
, что соответствует дуге
по окружности якоря. При этом якорь можно рассматривать как два совмещенных
ортогонально расположенных электромагнита: продольного и поперечного, – с МДС
и
.
В машине, работающей под нагрузкой, МДС якоря взаимодействует с МДС основных
полюсов, образуя результирующую МДС машины. В общем случае результирующий
магнитный поток машины нельзя рассматривать как образованный независимым действием
продольной и поперечной МДС из-за насыщения магнитной цепи.
Рассмотрим несколько важных случаев реакции якоря.
Предположим, что машина работает в режиме генератора и вращается против часовой
стрелки с некоторой постоянной частотой вращения.
1. Щетки стоят на нейтрали. Магнитная индукция под набегающим краем полюса
уменьшается – реакция якоря размагничивающая, а под сбегающим краем полюса
увеличивается – реакция якоря намагничивающая.
В ненасыщенной машине размагничивание под набегающим краем компенсируется
намагничиванием под сбегающим краем полюса. Результирующимй магнитный поток
остается неизменным по величине, но смещается на некоторый угол по направлению
вращения якоря. Точки, в которых кривая результирующего поля машины проходит через
нуль, определяют положениефизической нейтрали. При холостом ходе (отсутствии тока
якоря) физическая нейтраль совпадает с геометрической, а при нагрузке – смешается по
направлению вращения.
В действительности, по причине насыщения магнитной цепи, намагничивание (увеличение
магнитной индукции) под сбегающим краем полюса не настолько велико как
размагничивание под набегающим, поэтому результирующий магнитный поток вследствие
реакции якоря несколько уменьшается.
2. Щетки сдвинуты с нейтрали по направлению вращения якоря. Имеем поперечную
продольную
МДС якоря. Поперечная МДС
и
искажает основное поле так же, как и в
рассмотренных двух первых случаях. Продольная МДС
действует размагничивающе.
То есть в генераторе при сдвиге щеток по направлению вращения якоря возникает
продольно-размагничивающая МДС якоря.
3. Щетки сдвинуты с нейтрали против направления вращения якоря. В генераторе возникает
продольно-намагничивающая МДС якоря. В двигателе, в отличие от генератора, ток якоря
течет против направления индуцируемой в якоре ЭДС, а в генераторе – по направлению.
Поэтому МДС якоря двигателя действует в обратном направлении по сравнению с МДС
якоря генератора.
Если машина работает генератором, то индуцируемая в ней ЭДС:
, где
– напражение на зажимах генератора;
– падение напряжения в
цепи якоря. При номинальных условиях работы падение напряжения
обычно 3-10 % от
составляет
. При нагрузке нужно учитывать размагничивающую МДС якоря
. Тогда МДС на одну пару полюсов:
, где сумме МДС отдельных участков магнитной
цепи: воздушного зазора
,
,
; полюсов
; зубщов
; ярма
; якоря с учетом продольной и поперечной реакции
. Для всей машины значение МДС будет больше в
раз.
4. Коммутация в машинах постоянного тока
Существуют 3 типа коммутации. Коммутация может быть:
ускоренной криволинейной коммутацией. Во время данной коммутации плотность тока под
набегающей на пластинку части щётки выше, чем под сбегающей с нее части. Наблюдается
искрение щётки;
прямолинейной коммутацией, когда плотность электрического потока одинкова под
набегающими и сбегающими краями щётки. Проводник почти не искрит;
замедленной криволинейной, когда плотность электротока под набегающим краем ниже,
чем под сбегающим.
Важными показателями, характеризующими коммутационный процесс будут:
быстрота перемены электротока в якорной секции,
плотность тока, протекающего через набегающую и сбегающую пластины;
непрерывность протекания электротока.
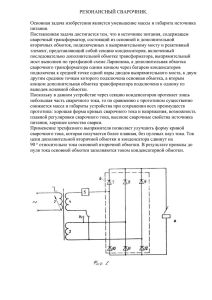
5 Коллекторные генераторы
Между полюсами N и S постоянного магнита находится вращающаяся часть машины –
якорь, вал которого вращается приводным двигателем. В двух продольных пазах
сердечника якоря расположена обмотка в виде одного витка, концы которого присоединены
к двум медным изолированным друг от друга полукольцам, образующим простейший
коллектор. На поверхность коллектора наложены щетки А и В, осуществляющие
скользящий контакт с коллектором и связывающие генератор с внешней цепью, куда
включена нагрузка сопротивлением R.
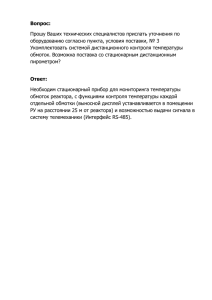
6 Коллекторные двигатели
При вращении якоря в витке будет наводиться переменная ЭДС.
E=B·V·l·cos a, (1)
где a - угол поворота витка относительно геометрической нейтрали (линии разделяющей
зоны полюсов разной полярности)
Рисунок 4 Выпрямление тока коллектором
Если бы не было коллектора и щеток, то ток во внешней цепи тоже был бы переменным, но
посредством коллектора он преобразуется в пульсирующий, так как в момент, когда ток в
пазовых сторонах витка меняет свое направление, при переходе их из зоны полюса одной
полярности в зону полюса другой полярности, происходит смена коллекторных пластин
под щетками.
Для получения постоянного тока во внешней цепи необходимо увеличить количество
витков в обмотке якоря и равномерно распределить их по поверхности сердечника и
соответственно увеличить количество коллекторных пластин.
Коллекторный двигатель постоянного тока состоит из двух основных частей – ротора и
статора. Ротор — вращающаяся часть двигателя – несёт на себе обмотку и коллектор.
Статор – неподвижная часть двигателя – включает в себя источник постоянного магнитного
поля – постоянный магнит или обмотку возбуждения, щётки и корпус.
Обмотка на роторе является одной из основных частей электрического двигателя
постоянного тока. По ней течёт ток нагрузки. Обмотка состоит из нескольких сегментов.
Их электрические выводы подключены к пластинам коллектора.
Коллектор – представляет собой набор металлических пластин, уложенных параллельно
друг другу по цилиндрической поверхности, но не касающихся друг друга. К каждой
пластине подключён вывод обмотки ротора. При вращении двигателя коллекторные
пластины помогают переключать ток на всё новые секции обмотки, что приводит к
дальнейшему вращению двигателя.
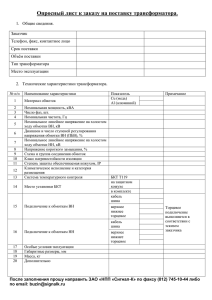
Коллекторный мотор с сердечником
Коллекторный мотор без сердечника
Щётки производят переключение секций обмотки по мере вращения электродвигателя и
обеспечивают возможность подключения обмотки двигателя на роторе к выводам на
корпусе мотора. В зависимости от материала конструкция щёток отличается: графитовые
щётки, выполненные в виде прямоугольных брусков или металлические щётки в виде
тонких пластин.
Конструкция неподвижной части двигателя – статора – отличается в зависимости от
разновидности электродвигателя постоянного тока. У двигателей постоянного тока с
обмоткой возбуждения на статоре располагается обмотка возбуждения, чаще всего
выполненная на сердечнике из стальных пластин. У двигателей постоянного тока с
постоянными магнитами, на статоре расположен постоянный магнит, создающий
магнитное поле двигателя.
Обмотка ротора и коллектор установлены на валу, который опирается на подшипники,
установленные в боковых фланцах корпуса.
Корпус выступает несущей конструкцией, куда устанавливаются остальные части
двигателя, а также может выступать в роли наружной оболочки, защищающей мотор от
пыли, грязи и механических воздействий.
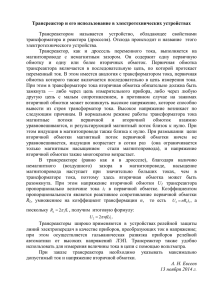
7 Устройство и рабочий процесс трансформаторов
Трансформаторы бывают однофазные и многофазные, с одной, двумя или большим
количеством обмоток. Рассмотрим схему и принцип работы трансформатора на примере
простейшего однофазного трансформатора.
Кстати, в других статьях можно почитать, что такое фаза и ноль в электричестве. Из
чего
состоит
трансформатор?
Во
простейшем
случае
из
одного
металлического сердечника и двух обмоток. Обмотки электрически не связаны одна с
другой и представляют собой изолированные провода. Одна обмотка (ее
называют первичной) подключается к источнику переменного тока. Вторая обмотка,
называемая вторичной, подключается к конечному потребителю тока.
Когда трансформатор подключен к источнику переменного тока, в витках его первичной
обмотки течет переменный ток величиной I1. При этом образуется магнитный поток Ф,
который пронизывает обе обмотки и индуцирует в них ЭДС.
Бывает, что вторичная обмотка не находится под нагрузкой. Такой режимы работы
трансформатора называется режимом холостого хода. Соответственно, если вторичная
обмотка подключена к какому-либо потребителю, по ней течет ток I2, возникающий под
действием ЭДС.
Величина ЭДС, возникающей в обмотках, напрямую зависит от числа витков каждой
обмотки. Отношение ЭДС, индуцированных в первичной и вторичной обмотках,
называется коэффициентом трансформации и равно отношению количества витков
соответствующих обмоток.
Путем подбора числа витков на обмотках можно увеличивать или уменьшать напряжение
на потребителе тока с вторичной обмотки.
8 Схемы, группы соединения обмоток и параллельная работа трансформаторов
Трехфазное преобразование напряжения можно выполнить двумя способами: с помощью
одного трехфазного трансформатора или с помощью группы из трех однофазных
трансформаторов.
Первичная обмотка трехфазного трансформатора представляет собой систему из трех
обмоток, запитанных от проводов, отдельно подающих напряжение на каждую из трех фаз
НН, а вторичная обмотка представляет собой систему из трех обмоток, соединенных
отдельными проводниками, отводящими напряжение от каждой из трех фаз НН.
Первичные и вторичные обмотки трехфазных трансформаторов при его подключении
могут быть соединены по различным схемам: звездой, треугольником или зигзагом. Тип
подключения обычно указан на заводской табличке трансформатора.
Принципиальная схема трехфазного трансформатора
Схемы соединений обмоток трехфазных трансформаторов
Трехфазный трансформатор имеет две трехфазные обмотки - высшего (ВН) и низшего (НН)
напряжения, в каждую из которых входят по три фазные обмотки, или фазы.
Таким образом, трехфазный трансформатор имеет шесть независимых фазных обмоток и
12 выводов с соответствующими зажимами, причем начальные выводы фаз обмотки
высшего напряжения обозначают буквами A, B, С, конечные выводы - X, Y, Z, а для
аналогичных выводов фаз обмотки низшего напряжения применяют такие
обозначения: a,b,c,x,y,z.
Каждая из обмоток трехфазного трансформатора — первичная и вторичная — может быть
соединена тремя различными способами, а именно:
звездой;
треугольником;
зигзагом.
В большинстве случаев обмотки трехфазных трансформаторов соединяют либо в звезду,
либо в треугольник (рис. 1).
Выбор схемы соединений зависит от условий работы трансформатора. Например, в сетях с
напряжением 35 кВ и более выгодно соединять обмотки в звезду и заземлять нулевую
точку, так как при этом напряжение проводов линии передачи будет в V3 раз меньше
линейного, что приводит к снижению стоимости изоляции.
Рис.1
Осветительные сети выгодно строить на высокое напряжение, но лампы накаливания с
большим номинальным напряжением имеют малую световую отдачу. Поэтому их
целесообразно питать от пониженного напряжения. В этих случаях обмотки
трансформатора также выгодно соединять в звезду (Y), включая лампы на фазное
напряжение.
С другой стороны, с точки зрения условий работы самого трансформатора, одну из его
обмоток целесообразно включать в треугольник.
Фазный коэффициент трансформации трехфазного трансформатора находят, как
соотношение фазных напряжений при холостом ходе:
nф = Uфвнх / Uфннх,
а линейный коэффициент трансформации, зависящий от фазного коэффициента
трансформации и типа соединения фазных обмоток высшего и низшего напряжений
трансформатора, по формуле:
nл = Uлвнх / Uлннх.
Если соединений фазных обмоток выполнено по схемам "звезда-звезда" или "треугольниктреугольник", то оба коэффициента трансформации одинаковы, т.е. nф = nл.
При соединении фаз обмоток трансформатора по схеме "звезда - треугольник" - nл = nфV3,
а по схеме "треугольник-звезда" - nл = nф/V3
Группы соединений обмоток трансформатора
Группа соединений обмоток трансформатора характеризует взаимную ориентацию
напряжений первичной и вторичной обмоток. Изменение взаимной ориентации этих
напряжений осуществляется соответствующей перемаркировкой начал и концов обмоток.
Стандартные обозначения начал и концов обмоток высокого и низкого напряжения
показаны на рис.1.
Рассмотрим вначале влияние маркировки на фазу вторичного напряжения по отношению к
первичному на примере однофазного трансформатора (рис. 2 а).
Рис.2
Обе обмотки расположены на одном стержне и имеют одинаковое направление намотки.
Будем считать верхние клеммы началами, а нижние - концами обмоток. Тогда ЭДС Ё1 и E2
будут совпадать по фазе и соответственно будут совпадать напряжение сети U1 и
напряжение на нагрузке U2 (рис. 2 б). Если теперь во вторичной обмотке принять обратную
маркировку зажимов (рис. 2 в), то по отношению к нагрузке ЭДС Е2 меняет фазу на 180°.
Следовательно, и фаза напряжения U2 меняется на 180°.
Таким образом, в однофазных трансформаторах возможны две группы соединений,
соответствующих углам сдвига 0 и 180°. На практике для удобства обозначения групп
используют циферблат часов. Напряжение первичной обмотки U1 изображают минутной
стрелкой, установленной постоянно на цифре 12, а часовая стрелка занимает различные
положения в зависимости от угла сдвига между U1 и U2. Сдвиг 0° соответствует группе 0,
а сдвиг 180° - группе 6 (рис. 3).
Рис.3
В трехфазных трансформаторах можно получить 12 различных групп соединений обмоток.
Рассмотрим несколько примеров.
Пусть обмотки трансформатора соединены по схеме Y/Y (рис. 4). Обмотки, расположенные
на одном стержне, будем располагать одну под другой.
9 Автотрансформаторы и трехобмоточные трансформаторы
Автотрансформатор — это такой вид трансформатора, в котором помимо магнитной
связи между обмотками имеется еще и электрическая связь. Обмотки обычного
трансформатора можно включить по схеме автотрансформатора, для чего выход X
обмотки wax соединяют с выводом а обмотки wax (рис. 3.2). Если выводы Ах подключить
к сети, а к выводам ах подключить нагрузку ZH, то получим понижающий
автотрансформатор. Если же выводы ах подключить к сети, а к выводам Ах подключить
нагрузку ZH, то получим повышающий автотрансформатор.
Рассмотрим подробнее работу понижающего автотрансформатора. Обмотка wax
одновременно является частью первичной обмотки и вторичной обмоткой. В этой
обмотке проходит ток I12. Для точки а запишем уравнение токов
т. е. по виткам wax проходит ток I12, равный разности вторичного I2 и первичного I1
токов. Если коэффициент трансформации автотрансформатора kA = wAx/wax,. немногим
больше единицы, то токи I1 и I2 мало отличаются друг от друга, а их разность составляет
небольшую величину. Это позволяет выполнить витки wax проводом уменьшенного
сечения. Введем понятие проходной мощности автотрансформатора, представляющей
собой всю передаваемую мощность Sпр=U2I2 из первичной цепи во вторичную. Кроме
того, различают еще расчетную мощность Spасч, представляющую собой мощность,
передаваемую из первичной во вторичную цепь магнитным полем. Расчетной эту
мощность называют потому, что размеры и вес трансформатора зависят от величины этой
мощности.
В трансформаторе вся проходная мощность является расчетной, так как между
обмотками трансформатора существует лишь магнитная связь. В автотрансформаторе
между первичной и вторичной цепями помимо магнитной связи существует еще и
электрическая. Поэтому расчетная мощность составляет лишь часть проходной
мощности, другая ее часть передается между цепями без участия магнитного поля. В
подтверждение этого разложим проходную мощность автотрансформатора Sпр = U2I2 на
составляющие. Воспользуемся для этого выражением (3.5). Подставив это выражение в
формулу проходной мощности, получим
Sпр =U2I2=U2(I1+I12)=U2I1+U2I12=Sэ+S
10 Переходные процессы в трансформаторах
Переходные процессы в трансформаторах возникают при включении, при изменении
нагрузки, различных коммутационных и аварийных режимах. Переходные процессы в
трансформаторах описываются дифференциальными уравнениями (2.1), (2.97). При
постоянных параметрах данные уравнения имеют аналитическое решение. При учете
насыщения, когда индуктивности и взаимные индуктивности зависят от токов, для
решения уравнений трансформатора применяют ЭВМ.
Вначале рассмотрим подключение трансформатора к сети. Будем анализировать
включение однофазного ненасыщенного трансформатора с разомкнутой вторичной
обмоткой (рис. 2.89). Для этого простого процесса можно записать следующее уравнение:
В ненасыщенном трансформаторе справедливо соотношение
Подставив формулу (2.130) в уравнение (2.129), исключим i и для приложенного
синусоидального напряжения получим
здесь i — угол, определяющий мгновенное значение напряжения в момент включения
трансформатора.
Таким образом, включение трансформатора при холостом ходе рассматривается как
подключение катушки к сети. Решение уравнения (2.131) имеет вид
Рис. 2.89. Включение ненагруженного трансформатора в сеть
где Ф' — мгновенное значение установившегося потока:
Ф" — мгновенное значение переходного свободного значения потока:
Фост — остаточное значение магнитного потока.
Графическое изображение решения уравнения (2.132) представлено на рис. 2.90. Характер
переходного процесса зависит от момента включения. При у = п/2 и Фост = 0 сразу
устанавливается поток Фтсоз со? и процесс включения проходит без бросков тока.
Рис. 2.90. Переходный процесс при включении трансформатора
Наиболее неблагоприятное протекание переходного процесса имеет место при (/ = 0 и
Фост, совпадающем по знаку со свободной составляющей потока. Этот случай включения
представлен на рис. 2.90. Поток достигает максимального значения примерно через
полпериода после включения, и Фтах ~ 1,8н-2,5Ф„.
11 Трансформаторы специального назначения
Трансформаторы специального назначения предназначены для непосредственного
питания потребительской сети или приемников электрической энергии, отличающихся
особыми условиями работы, характером нагрузки или режимом работы.
Основными из них являются:
1) Трансформатор для дуговой электросварки (рис. 31):
– представляет собой однофазный понижающий трансформатор, преобразующий
напряжение сети 220 или 380 В в напряжение (60÷70) В, необходимое для устойчивого
горения электрической дуги. Т. к. сопротивление электрической дуги очень мало,
сварочный трансформатор работает в режиме, близком к короткому замыканию. Поэтому
для ограничения величины тока во вторичную цепь трансформатора последовательно
включают дроссель с подвижным сердечником. Изменяя величину воздушного зазора в
магнитной цепи дросселя, можно плавно менять величину индуктивного сопротивления
дросселя и, следовательно, величину сварочного тока.
2) Трансформатор с подвижным сердечником – это трансформатор, сердечник которого
имеет неподвижную часть с первичной обмоткой и подвижную часть с вторичной
обмоткой, расположенную внутри неподвижной. Первичная обмотка выполнена из двух
катушек, включенных встречно. Если такой трансформатор включить в цепь аналогично
вольтдобавочному трансформатору то, изменяя положение подвижного сердечника с
вторичной обмоткой, можно плавно регулировать вторичное напряжение.
3) Трансформатор с подвижным сердечником
– это трансформатор, сердечник которого имеет неподвижную часть с первичной обмоткой
и подвижную часть с вторичной обмоткой, расположенную внутри неподвижной.
Первичная обмотка выполнена из двух катушек, включенных встречно. Если такой
трансформатор включить в цепь аналогично вольтдобавочному трансформатору то, изменяя
положение подвижного сердечника с вторичной обмоткой, можно плавно регулировать
вторичное напряжение.
4) Трансформаторы для выпрямительных установок (рис. 33) – это трансформаторы, во
вторичную цепь которых включены вентили, преобразующие переменный ток в
пульсирующий. Массогабариты трансформаторов для выпрямительных установок всегда
больше, чем у трансформаторов такой же выходной мощности, но при синусоидальных
токах в обмотках. Это объясняется тем, что в трансформаторах, работающих в
выпрямительных схемах, полезная мощность определяется постоянной составляющей
вторичного тока, нагрев обмоток – полным вторичным и первичным токами, содержащими
высшие гармоники.
12 Принцип действия и устройство бесколлекторных машин
Синхронный электродвигатель, принцип действия которого основан на частотном
регулировании и самосинхронизации получил название бесколлекторного двигателя. В
данной конструкции, вектор магнитного поля статора управляется относительно положения
ротора. Бесколлекторный двигатель был создан для того, чтобы улучшить свойства
стандартных коллекторных электродвигателей постоянного тока. Он органично соединил в
себе самые лучшие качества двигателей постоянного тока и бесконтактных
электродвигателей.
Бесколлекторный двигатель нередко используются в радиоуправляемых моделях
летательных аппаратов. Их выдающиеся характеристики и живучесть получили широкую
популярность, благодаря отсутствию трущихся деталей в виде щеток, которые
осуществляют передачу тока. Для того, чтобы более полно представить разницу, нужно
вспомнить, что в стандартном коллекторном электродвигателе происходит вращение ротора
с обмотками внутри статора, основой которого служат постоянные магниты. Коммутация
обмоток производится с помощью коллектора, в зависимости от положения ротора. В
электродвигателе переменного тока, наоборот, ротор с магнитом вращается внутри статора
с обмотками. Примерно такую же конструкцию имеет асинхронный двигатель.
13 Основные типы обмоток статора бесколлекторных машин и принципы их
выполнения
В машинах переменного тока используются следующие основные типы обмоток: 1)
катушечные, 2) стержневые, 3) специальные. Катушечные обмотки изготовляют из
изолированного медного или алюминиевого провода круглого по-1еречного сечения,
стержневые и специальные —из шин прямоугольного поперечного сечения.
Электрические машины переменного тока составляют основу современной
электроэнергетики, как в сфере производства, так и в сфере потребления электрической
энергии. За небольшим исключением все эти машины являются бесколлекторными.
Существует два вида бесколлекторных машин переменного тока: асинхронные и синхронные машины. Отличаясь рабочими свойствами, эти машины имеют конструктивное
сходство, и в основе их теории лежат некоторые общие вопросы, касающиеся процессов и
явлений, связанных с рабочей обмоткой — обмоткой статора. Поэтому, прежде чем перейти
к подробному изучению асинхронных и синхронных машин, целесообразно рассмотреть
общие вопросы теории этих машин. Как асинхронные, так и синхронные машины обладают
свойством обратимости (см. § В.2), т. е. каждая из них может работать как в режиме
генератора, так и в режиме двигателя. Однако первоначальное знакомство с этими
машинами полезно начать с рассмотрения принципа действия синхронного генератора и
принципа действия асинхронного двигателя. Это даст возможность получить необходимое
на данном этапе изучения представление об устройстве этих машин и происходящих в них
электромагнитных процессах. Данный раздел посвящен изучению принципа действия
бесколлекторных машин переменного тока в основных их режимах, устройства обмоток
статоров этих машин и процесса наведения ЭДС и МДС в них.
14 Магнитодвижущая сила обмотки статора бесколлекторных машин
Обмотка, создающая вращающееся поле, представляет собой m-фазную систему, т.е.
состоит из m обмоток, которые сдвинуты друг относительно друга в пространстве и по
которым протекают токи, сдвинутые во времени. Каждая из обмоток фаз создает
пульсирующий поток (неподвижный в пространстве и изменяющийся во времени),
сдвинутый относительно других в пространстве и во времени. Если все обмотки фаз имеют
одинаковое число витков и сдвинуты в пространстве на электрический угол γ2 = 2π /m
(электрический угол – это пространственный угол, умноженный на число пар полюсов рм ),
токи имеют одинаковую амплитуду Im и частоту f и сдвинуты во времени на угол β= 2π /m,
то результирующее магнитное поле будет круговым. Это означает, что поток представляет
собой вектор постоянной длины, вращающийся в пространстве с постоянной угловой
скоростью. Конец этого вектора описывает окружность, его значение Ф= (m /2)Фм, где Фм
- амплитудное значение потока обмотки фазы. Условия
γ2=2π /m ; β = 2π /m ; Im1 = Im2 =... = Imm
называют условиями кругового поля в m - фазной машине. В электрических машинах
переменного тока для создания вращающегося поля используются в основном трехфазные
и двухфазные обмотки.
15 Режимы работы и устройство асинхронной машины
Двигательный режим. Принцип действия трехфазного асинхронного двигателя
рассмотрен в § 6.2. При включении обмотки статора в сеть трехфазного тока возникает
вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора,
наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис. 6.4).
В результате взаимодействия этих токов с вращающимся магнитным полем на роторе
возникают электромагнитные силы. Совокупность этих сил создает электромагнитный
вращающий момент, под действием которого ротор асинхронного двигателя приходит во
вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного
двигателя механически соединить с валом какого-либо исполнительного механизма ИМ
(станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев
противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет
механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и
передается исполнительному механизму ИМ (рис. 10.1, б).
Весьма важным параметром асинхронной машины является скольжение — величина,
характеризующая разность частот вращения ротора и вращающегося поля статора:
S = (n1 – n2)/ n1 (10.1)
Скольжение выражают в долях единицы либо в процентах. В последнем случае величину,
полученную по (10.1), следует умножить на 100.
Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного
двигателя частота вращения ротора n2уменьшается. Следовательно, скольжение
асинхронного двигателя зависит от механической нагрузки на валу двигателя и может
изменяться в диапазоне 0 <s ≤ 1.
При включении асинхронного двигателя в сеть в начальный момент времени ротор под
влиянием сил инерции неподвижен (n2 = 0). При этом скольжение s равно единице.
Рис. 10.1. Режимы работы асинхронной машины
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается
с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма
мало отличается от нуля (s ≈ 0). Скольжение, соответствующее номинальной нагрузке
двигателя, называют номинальным скольжением shom. Для асинхронных двигателей
общего назначения shom = 1 8%, при этом для двигателей большой мощностиsном = 1%, а
для двигателей малой мощности sном = 8%.
Преобразовав выражение (10.1), получим формулу для определения асинхронной частоты
вращения (об/мин):
n2 = n1(1-s). (10.2)
16 Общая характеристика режимов работы при неподвижном и вращающемся
роторе.
При неподвижном роторе, как было установлено в § 24-1, асинхронная машина
работает как трансформатор., в котором электрическая энергия первичной цепи за вычетом
потерь превращается в электрическую же энергию вторичной цепи. Во вращающейся же
асинхронной машине в двигательном режиме, работы электрическая энергия, потребляемая
первичной обмоткой из питающей сети, за вычетом потерь в машине превращается в
механическую энергию на валу машины. В генераторном режиме, наоборот-, механическая
энергия, подводимая к валу, превращается в электриче-сжую энергию в первичной обмотке
и передается в сеть. Кроме того, режим работы асинхронной машины при вращающемся
роторе более сложен в том отношении, что в этом случае частоты токов первичной и
вторичной цепей не равны (см. § 19-2), По этой причине, в частности, невозможно изображение первичных и вторичных электрических величин на
общих временных векторных диаграммах.
Вследствие изложенного, естественно, возникает мысль о замене вращающейся
асинхронной машины эквивалентной ей по энергетическим И электромагнитным
соотношениям машиной с заторможенным ротором или, иначе говоря, о приведении
режима работы вращающейся асинхронной машины к эквивалентному режиму работы этой
же машины при неподвижном роторе.
Такое приведение оказывается возможным потому, что и при вращающемся роторе
н. с. и магнитные поля обмотки статора и ротора вращаются синхронно и образуют общее
вращающееся поле (см. § 19-2), точнее, потому, что<вид и характер пространственной
векторной диаграммы асинхронной машины (см. рис. 24-2, а) одинаковы как при
неподвижном, так и при вращающемся роторе. Действительно, в § 24-1 было показано, что
диаграмма рис. 24-2, а при всех положениях ротора относительно статора одинакова, если
только одинаковы действующие значения вторичных токов и их фазные сдвиги
Относительно вторичных э. д. с. При вращающемся с заданной скоростью роторе
асинхронной машины и установившемся режиме ее работы действующее значение
вторичного тока и его сдвиг относительно э. д. свторйчнойг обмотки, индуктированной
результирующим потоком, также неизменны, так как-неизменны активные сопротивления
и индуктивные сопротивления рассеяния вторичной обмотки. Поэтому при любом
положении ротора» т. е. в любой момент времени, пространственная диаграмма векторов
рис. 24~2, а также неизменна.
В связи с изложенным можно заключить, что при приведении режима работы
^вращающейся машины к эквивалентному режиму неподвижной машины необходимо,
чтобы ее пространственная векторная диаграмма не изменилась, т. е. чтобы сохранились
величины токов ив. с обмоток и их фазные сдвиги относительно друг друга. При этих
условиях остаются неизменными величины результирующих н. с. и магнитных потоков,
энергия магнитных полей, потребляемой из сети первичной мощности, магнитных и
электрических потерь в статоре, передаваемой через магнитное поле со статора на ротор
электромагнитной мощности и т. д. Единственным существенным отличием неподвижной
машины будет то, что в ней не происходит преобразования механической энергии в
электрическую и гэбратно. Поэтому при переходе к неподвижной машине механическая
мощность должна быть представлена равной ей электрической мощностью.
Количественные соотношения. Величину э. д. с, индуктируемой результирующим
магнитным потоком Ф в фазе вторичной
обмотки при неподвижном роторе, когда s == 1 и /2 = /ь будем по-прежнему
обозначать буквой Е2, а величину этой э. д. с. при той же величине потока Ф, но при любом
скольжении s, когда /2 = sfly обозначим £2S. При этом
Частота тока -вторичной цепи пропорциональна скольжению. Поэтому величины
активного сопротивления г2 и индуктивности рассеяния L2 вторичной цепи при заметном
проявлении поверхностного эффекта будут зависеть от частоты f2 = sfi или скольжения s.<
Однако влияние поверхностного эффекта может быть учтено особо, и поэтому положим
здесь r2 = const и L2 ;= const. Тогда индуктивное сойротивление рассеяния вторичной цепи
пропорционально скольжению:
xais = 2it/2L2 = 2nsf1L2 = sx02.
Здесь ха% — индуктивное сопротивление рассеяния вторичной цепи при
неподвижном роторе или при /а = flt a xais — величина этого сопротивления при любом
скольжении.
Величины полного сопротивления
вращающемся роторе соответственно будут
вторичной
цепи
при
неподвижном
и
Если к вторичной обмотке подключено некоторое внешнее сопротивление, то г3 и
ха2 должны включать в себя также составляющие этого сопротивления.
Согласно выражениям (24-15) и (24-16), величина вторичного тока /2 при
вращающемся с любым скольжением роторе
Разделим числитель и знаменатель правой части (24-17) на s. Тогда
Левая часть равенств (24-17) и (24-18) представляет собой комплекс вторичного тока
при вращающемся роторе, который при переходе машины к эквивалентному режиму с
неподвижным ротором
остается неизменным. В числителе правой части выражения (24-18) стоит величина
вторичной э. д. с. при неподвижном роторе. Поэтому знаменатель правой части (24-18)
указывает на то, что при переходе машины к режиму с неподвижным ротором для
сохранения величины и фазы вторичного тока неизменными вторичная цепь должна
обладать сопротивлением
Если, например, s = 0,05, то 1/s = 20 и сравнение равенств (24-17) и (24-18)
показывает, что при переходе машины к режиму с неподвижным ротором э. д. с. вторичной
цепи увеличивается в 20 раз и одновременно во столько же раз должны быть увеличены обе
составляющие вторичного сопротивления. При этих условиях как величина тока /2, так и
величина его фазного угла сдвига
= ^а = -^г (24-20)
остаются, естественно, неизменными.
17 Схема замещения и векторная диаграмма асинхронного двигателя
Векторные диаграммы вторичной цепи асинхронного двигателя при вращающемся
роторе и в эквивалентном режиме с неподвижным ротором изображены на рис. 24-4.
Следует иметь в виду, что в рассматриваемых двух режимах частоты тока /2 различны.
Равенства (24-17) и (24-18) показывают, что при переходе машины в режим работы
с неподвижным ротором э. д. с. и индуктивное сопротивление вторичной цепи будут
соответствовать реальным значениям этих величин при неподвижном роторе, но вместо
активного сопротивления г2 эта цепь должна содержать сопротивление rjs, т. е. активное
сопротивление должно быть увеличено на величину
В двигательном режиме (0 < s < 1) величина г2д положительна. Например, при s =
0,05 будет г2д = 19г2.
Рис. 24-4. Векторная диаграмма вторичной цепи асинхронного двигателя при
вращающемся (сплошные веьто-ры) и неподвижном (штриховые векторы) роторе.
18 Электромеханические характеристики асинхронного двигателя
Общие сведения. Электромеханической характеристикой АД называют зависимость
между угловой скоростью ротора со (или скольжением) и током статора 1 или током
ротора Г2.
Электромеханические характеристики АД рассчитывают согласно схеме замещения (рис.
2.24) по формуле
где Uф — фазное напряжение сети, В; l'2(s) — электромеханическая характеристика
двигателя по току ротора, А.
В режиме идеального холостого хода через обмотки статора протекает только ток
намагничивания УД, который создает магнитный поток в статоре, поэтому ток статора —
это геометрическая сумма приведенного тока ротора и намагничивающего тока:
Механической характеристикой АД называют зависимость электромагнитного
момента М от скольжения, то есть М =/(s) или со = f{M), вывод которой приведен ниже.
Электромагнитная мощность трех фаз, которая передается через воздушный зазор ротору
двигателя, равна:
Эта же мощность через электромагнитный
момент
откуда
Зависимость (2.46) с учетом выражения (2.42) представляет собой механическую
характеристику для двигательного режима.
Скольжение, при котором момент двигателя будет максимальным,
называют критическим:
Знак «плюс» соответствует двигательному режиму, а знак «минус» — генераторному
режиму с отдачей энергии в сеть. Если подставить в уравнение (2.47) значение sK, то
получим выражение критического
момента
Из формулы (2.49) следует, что Л/к в генераторном режиме будет отрицательным и по
абсолютному значению в 1,5...3 раза больше критического момента в двигательном
режиме.
Разделив уравнение (2.47) на уравнение (2.49), после соответствующих преобразований
получим уравнение механической характеристики, применяемое для двигателей малой
мощности
где Мк, 5к — соответственно критические момент и скольжение асинхронного двигателя;
а = Ri/R'2.
Для двигателей средней и большой мощности, полагая R *0, механическую
характеристику строят по упрощенной формуле, позволяющей использовать лишь
паспортные данные двигателя:
где Л/к = Л/НХ, X — перегрузочная способность двигателя; 5k =5н(1 +7^—1).
Расчет механических и электромеханических характеристик. Его
проводят в следующем порядке.
1. На основании паспортных данных двигателя определяют его номинальный Мн и
критический Мк моменты, а далее рассчитывают механическую характеристику по
формуле (2.50) для двигателей мощностью до 100 кВт и (2.51) для двигателей
средней и большой мощности.
2. Электромеханическую характеристику, определяющую зависимость между
скоростью вращения ротора и и током ротора Г2, рассчитывают по формуле (2.42),
а током статора 1 по формуле профессора В. А. Шубенко
где /[ — ток статора, А; /0 — ток холостого хода двигателя, А; 1„ — номинальный ток
статора двигателя, А; М— момент двигателя при скольжении s, определяемый по
естественной механической характеристике, Н • м; Л/„ — номинальный момент двигателя,
Н • м.
3. Для асинхронных двигателей при наличии неполных каталожных данных параметры
двигателя определяют приближенно [14]. При этом для машин малой мощности
принимают а = 1. Сначала находят критическое скольжение sK, полагая л =5„, затем
вычисляют критический момент Мк = ткМн, где тк — отношение критического момента'к
номинальному, тк = X.
Дальнейший расчет электромеханических характеристик выполняют аналогично п. 2.
4. Расчет искусственных электромеханических характеристик удобно проводить по
формулам проф. Шубенко: /1(5) по формуле (2.52), a /2(i) по формуле (2.52, а)
где /2и — номинальный ток ротора двигателя, А.
Методика расчета и построения естественных и искусственных механических и
электромеханических характеристик подробно освещена в учебной литературе [2, 14]. В
качестве примера на рисунке 2.25 представлены механическая (а) М =f(s) или со =^(ЛД и
электромеханические (б) Г2 =/3(ш) и /[ =/*(со) характеристики асинхронного двигателя.
В заключение следует отметить, что механическую характеристику по формуле Клосса
рассчитывают для скольжений 0 < s < 0,7,
Рис. 2.25. Механическая (а) и электромеханические характеристики АД (б)
а при скольжении $>0,7 используют паспортные данные пускового и минимального
моментов. При этом минимальный момент находится в диапазоне скольжений 0,7...0,9
(если в паспорте двигателя отсутствует конкретное значение $пйП).
Пример 2.8. Паспортные данные асинхронного двигателя серии 4А255М4УЗ.
Номинальная мощность Р2и, кВт 55
Номинальное напряжение двигателя, В 220/38'
Синхронная частота вращения (щ), мин-1 1500
Номинальное скольжение (5^), % 1,4
КПД (Пдв) 0,925
Коэффициент мощности (cos <р) 0,9
Момент инерции двигателя (/дв), (кг • м2) 0,64
Кратность пускового момента (тп) 1,3
Кратность минимального момента (п^^) 1
Кратность критического момента (тк) 2,5
Критическое скольжение (jJ 0,1
Допустимая кратность пускового тока (/„) 7
Данный двигатель имеет следующие параметры схемы замещения в относительных
единицах: Л^ = 4,2; R = 0,027; = 0,086; /^ = 0,015; Л^ = 0,14.
21 Однофазные и конденсаторные асинхронные двигатели
Однофазный асинхронный двигатель по конструкции аналогичен трёхфазному и состоит
из статора, в пазах которого уложена однофазная рабочая обмотка и короткозамкнутого
ротора (рис. 55, а.). Т. к. однофазный асинхронный двигатель не создаёт пусковой момент
(нет вращающегося магнитного поля, а только пульсирующее), для его создания на статоре
помимо рабочей помещают и пусковую обмотку. Ось пусковой обмотки обычно сдвигают
относительно оси рабочей обмотки на 90˚ и, кроме того, токи в них также должны быть
сдвинуты на 90˚. Это достигается включением фазосмещающего элемента (R, L или C). Т.
о. во время пуска двигатель считается двухфазным: после пуска пусковая обмотка
отключается и двигатель работает как однофазный.
Конденсаторный асинхронный двигатель имеет на статоре две обмотки, занимающие
одинаковое число пазов и сдвинутые в пространстве на 90˚ (рис.). Одну из обмоток
(главную) включают непосредственно в однофазную сеть, а другую (вспомогательную)
включают в ту же сеть, но через рабочий конденсатор Cраб (рис. 55, б.). В конденсаторном
двигателе, в отличие от рассмотренного ранее однофазного асинхронного двигателя,
вспомогательная обмотка после пуска не отключается и остаётся включенной в течение
всего периода работы, при этом ёмкость Cраб создаёт фазовый сдвиг между токами
главной и вспомогательной обмоток (рис 56). Конденсаторный асинхронный двигатель
работает после пуска с вращающейся МДС, в отличие от ранее рассмотренного
однофазного асинхронного двигателя, который работает с пульсирующей МДС.
Конденсаторные двигатели иногда называют двухфазными, т. к. обмотка статора содержит
две фазы.
24 Режимы работы синхронных генераторов, включенных в систему
Существует 3 режима работы синхронных машин: в режиме генератора, в режиме
двигателя, в режиме синхронного компенсатора. То, в каком режиме будет
функционировать машина зависит от того как взаимодействуют магнитные поля.
25 Асинхронные машины специального назначения
К асинхронным машинам специального назначения относят (рис.):
1) Индукционный регулятор напряжения (ИР) (рис. 57, а) – представляет собой
асинхронную машину с фазным ротором, предназначенную для плавного регулирования
напряжения. Обмотки статора и ротора ИР имеют автотрансформаторную связь, поэтому
его иногда называют поворотным автотрансформатором. Напряжение сети подводится к
обмотке ротора, при этом ротор создаёт вращающееся магнитное поле, наводящее в
обмотке статора ЭДС E2. При изменении угла поворота ротора от 0 до 180˚, напряжение в
обмотке статора изменится от U2 min = U1-E2 до U2 max = U1+E2.
Рис. 57. Схема индукционного регулятора напряжения (ИР) (а) и фазорегулятора (ФР) (б).
2) Фазорегулятор (ФР) (рис. 57,б)- представляет собой асинхронную машину с фазным
ротором, предназначенную для изменения фазы вторичного напряжения относительно
первичного при неизменном вторичном напряжении. Обмотки статора и ротора ФР
электрически не соединены друг с другом, т. е. имеют трансформаторную связь, поэтому
ФР иногда называют поворотным трансформатором. ФР применяются в устройствах
автоматики (для фазового управления) и в измерительной технике (для поверки ваттметров
и счётчиков).
26 Синхронные машины специального назначения
1) Синхронные машины с постоянными магнитами (магнитоэлектрические) – не имеют
обмотки возбуждения, а возбуждающий магнитный поток у них создаётся постоянными
магнитами, расположенными на роторе. В результате взаимодействия вращающегося
магнитного поля статора с магнитным полем постоянных магнитов, расположенных на
роторе, ротор начинает вращаться с частотой n2 = n1. При питании двигателя от
однофазной сети в цепь одной из фаз включают конденсатор, необходимый для создания
вращающегося магнитного поля статора. Применяют синхронные машины с постоянными
магнитами чаще всего в качестве двигателей малой мощности до 100 Вт, реже - до 500 Вт.
В качестве генераторов их применяют реже, в основном в качестве тахогенераторов.
Синхронные машины с постоянными магнитами имеют высокие энергетические
показатели (КПД и cos φ), но повышенную стоимость из-за дороговизны и сложности
обработки постоянных магнитов.
Рис. 44. Магнитоэлектрические синхронные двигатели с радиальным (а) и аксиальным (б)
расположением постоянных магнитов: 1 – статор; 2 – короткозамкнутый ротор; 3 –
постоянный магнит.
2) Синхронные реактивные двигатели (СРД) (рис. 45) – отличаются отсутствием
возбуждения со стороны ротора. Основной магнитный поток в этих двигателях создаётся
исключительно за счёт МДС обмотки статора, которая в двух - и в трёхфазных СРД
является вращающейся.
Рис. 45. Принцип действия синхронного реактивного двигателя; возникновение
реактивного вращающего момента) (а) Мр и изменение его до 0 (б).
Простота конструкции и высокая эксплуатационная надёжность обеспечили СРД малой
мощности широкое применение в устройствах автоматики, в устройствах звуко – и
видеозаписи и других устройствах, требующих строгого постоянства частоты вращения.
Недостатками СРД являются низкий КПД и cos φ.
3) Гистерезисные двигатели (рис. 46.) – это синхронные двигатели, у которых вращающий
момент создаётся за счёт гистерезиса при перемагничивании ферромагнитного материала
ротора. Статор в гистерезисном двигателе выполняется, так же как и в других машинах
постоянного тока, т. е. может быть двух – или трёхфазной, а ротор представляет собой
цилиндр из магнитно-твёрдого материала без обмотки. Ротор двигателя намагничивается
под действием магнитного поля статора, т. е. становится постоянным магнитом, и
гистерезисный двигатель работает аналогично синхронному двигателю с постоянными
магнитами. Гистерезисные двигатели выпускают на мощность до 2000 Вт и частоту 50,
400 и 500 Гц в двух – и трёхфазном исполнениях.
27 Машины постоянного тока специального назначения
К машинам постоянного тока специального назначения относят
электромашинные усилители (ЭМУ), тахогенераторы, бесконтактные двигатели
постоянного тока и исполнительные двигатели постоянного тока (рис. 17.).
1). ЭМУ – это машины, работающие в генераторном режиме и усиливающие
электрические сигналы. Простейшие ЭМУ – это генераторы постоянного тока
независимого возбуждения, но они не нашли широкого распространения из за
небольшого коэффициента усиления (не более 100). Наибольшее
распространение получили ЭМУ поперечного поля, у которых основным
магнитным потоком является поток, создаваемый током обмотки якоря. На его
коллекторе установлено два комплекта щёток: один g1 и g2 – на поперечной оси
главных полюсов (на геометрической нейтрали), а другой d1 и d2 – по продольной
оси главных полюсов. Щётки g1 и g2 замкнуты накоротко, а к щёткам d1 и d2
подключена нагрузка. Помимо обмотки якоря ЭМУ имеет одну или несколько
обмоток управления (y1; y2), компенсационную обмотку (ОК), поперечную
подмагничивающую обмотку (ОП) и обмотку добавочных полюсов (ОД). Якорь
ЭМУ вращается электродвигателем. Коэффициент усиления может достигать
2000-20 000.
с 2). Тахогенераторы постоянного тока служат для измерения частоты вращения по
значению выходного напряжения, Они представляют собой генераторы малой мощности с
возбуждением от постоянного магнита или с электромагнитным независимым
возбуждением. На выходе включен электроизмерительный прибор магнитоэлектрической
системы, шкала которого проградуирована в единицах измерения частоты вращения.
3). Бесконтактные двигатели постоянного тока (БДПТ) отличаются от коллекторных
двигателей традиционной конструкции тем, что в них щёточно-коллекторный узел
заменён полупроводниковым коммутатором (инвертором), управляемым сигналами,
поступающими с бесконтактного датчика положения ротора (ДПР). ДПР расположен на
валу двигателя. Рабочая обмотка двигателя – обмотка якоря – расположена на сердечнике
статора, а постоянный магнит на роторе. В качестве чувствительного элемента ДПР чаще
всего применяют датчики ЭДС Холла. Назначение ДПР – выдавать в блок коммутатора
управляющий сигнал в соответствии с положением полюсов постоянного магнита
относительно секций якоря, Блок коммутатора меняет соответственно направление
магнитного потока в обмотках, что приводит к вращению двигателя. КПД БДПТ по
сравнению с коллекторными выше, они более надёжны и долговечны, но имеют
повышенную стоимость за счёт полупроводникового коммутатора, датчиков Холла и
постоянного магнита. Мощность БДПТ обычно до 120 Вт.
4). Исполнительные двигатели постоянного тока применяют в системах автоматики для
преобразования электрического сигнала в механическое перемещение. В качестве
исполнительных двигателей в настоящее время применяют чаще всего двигатели с
независимым возбуждением, реже – с возбуждением от постоянных магнитов.
Список литературы
Основная литература
1.Кацман М.М. Электрические машины, М.: Академия, 2018
2.Кацман М.М. Сборник задач по электрическим машинам (8-е изд. стер.) - М.:
Издательский центр «Академия», 2014.
3.Кацман М.М.
Лабораторные работы по электрическим машинам и
электроприводу (9-е изд. стер.) М.: Академия, 2016
4.Кацман М.М., Справочник по электрическим машинам (7-е изд. испр.)- М.:
Издательский центр «Академия» 2013.
Дополнительная литература
1.ГОСТ 16110 – 82, СТСЭВ 1103 – 78. Трансформаторы силовые. Термины и
определения.
2.ГОСТ 16364.1 – 85 СТ СЭВ 4438 – 83. Двигатели асинхронные. Общие технические
условия
3.ГОСТ 16264.2 – 85. Двигатели синхронные. Общие технические условия.
4.ГОСТ 16264.4 – 85. Двигатели постоянного тока бесконтактные. Общие
технические условия.
Электронные издания (электронные ресурсы)
1.Информационный портал. (Режим доступа): URL: http://www.elektroshema.ru (дата
обращения: 20.11.2018).
2.Информационный
портал.
(Режим
доступа):
URL:
http://www.ielectro.ru/Products.html?fn_tab2doc=4 (дата обращения: 20.11.2018).
3.Информационный
портал.
(Режим
доступа):
URL
http://electricalschool.info/spravochnik/electroteh/ (дата обращения: 20.11.2018).