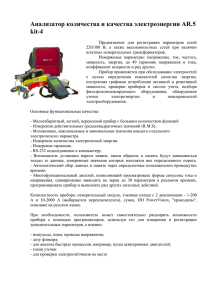
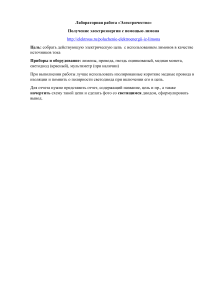
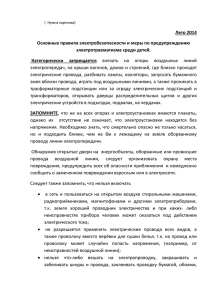
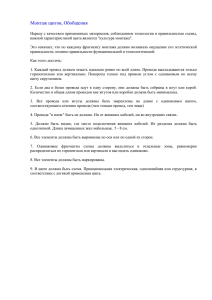
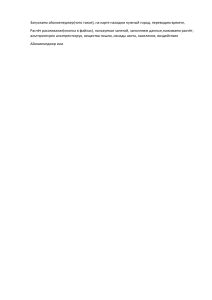
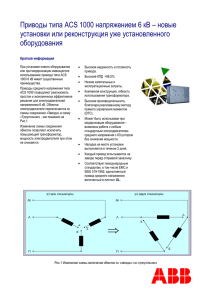
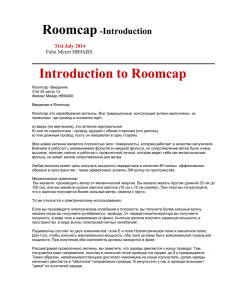
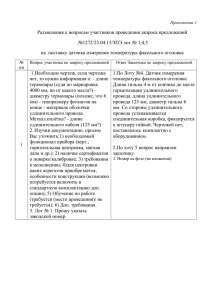
Содержание Введение. Структурный синтез системы. Расчёт параметров элементов силовой цепи . Описание схемы регулирующего органа . Расчёт параметров нагрузки и коэффициентов трансформации трансформаторов . Силовой трансформатор а) Расчёт параметров б) Выбор магнитопровода и проводов . Силовые ключи и драйверы а) Расчёт параметров б) Выбор элементов . Выходной фильтр а) Расчёт параметров б) Выбор элементов . Моделирование силовой части . Оценка энергетической эффективности разработанного устройства. Расчёт параметров системы управления . Выбор измерительного трансформатора и элементов для системы управления . Моделирование системы управления Заключение Список литературы Введение Сегодня для построения электронных источников питания аппаратуры широко применяются импульсном режиме. транзисторные Они преобразователи, обеспечивают работающие необходимые в потребителю электрические и информационные параметры выходного сигнала и имеют ряд преимуществ, а именно высокое качество выходного напряжения, широкие возможности показатели, стабилизации значительное и регулирования, быстродействие, малые низкий массогабаритные показатель уровня электромагнитных помех, защиту от короткого замыкания нагрузки, высокий КПД и многое другое. Модуляционные источники питания отличаются широким разнообразием структурных и схемотехнических технико-экономические показателями решений. имеют Из них источники хорошие питания с вольтодобавкой, построенные на базе ячеек со звеном повышенной частоты. В принципе преобразователи с вольтодобавкой работают в режиме АИМ-II. Промежуточное повышение частоты обеспечивается инвертором, который преобразует прямоугольное входное с синусоидальное синусоидальной напряжение огибающей. в разнополярное Для реализации амплитудно-импульсной модуляции используется схема демодулятора, которая определяет длительность добавки напряжения. Целью данной курсовой работы является разработка однофазного стабилизатора переменного напряжения, с регулирующим органом с вольтодобавкой на основе ячейки с ОРМ в звене повышенной частоты. В круг задач, решаемых при проектировании, входят расчет и выбор параметров системы с учетом требований технического задания, исследование выбранной схемы преобразователя путем моделирования и оценка энергетической эффективности устройства. Необходимо разработать подсистему защит и описать структуру и элементы системы управления. I. Структурный синтез системы Нестабильное напряжение сети через входной фильтр поступает на регулирующий орган (импульсный преобразователь), преобразуется им в соответствии с алгоритмом работы системы управления. Через выходной фильтр нагрузка обеспечивается стабильным синусоидальным напряжением, с заданным действующим значением. Стабилизация осуществляет система управления на основании сигнала задания и сигнала обратной связи. Система защиты обеспечивает безопасный режим работы, при котором выходная мощность не превышает значения, установленного заданием. Рис.1. II. Расчёт параметров элементов силовой цепи . Описание схемы регулирующего органа трансформатор энергетический нагрузка измерительный Дополнительным условием задания на курсовую работу является использование регулирующего органа с вольтодобавкой на основе ячейки с ОРМ (однополярной реверсивной модуляцией) в звене повышенной частоты. Схема такой ячейки и режимы её работы приведены в табл.1. Таблица 1 Схема регулирующего органа С ОРМ в звене повышенной частоты Режим Цикл замыкания ключей Инвертор Демодулятор РД 2,3 1,4 НП РО 2,3 1,4 2,3 1,4 МО 2,3 1,4 7,5-5,8-8,6 8,6-6,7-7,5 5,7-6,8 6,8-5,7 8,6-6,7-7,5 7,5-5,8-8,6 6,7 5,8 МД2,3 ,45,8 6,7 МД - максимальная добавка; РД - регулируемая добавка; НП неискаженная (прямая передача); РО - регулируемая отбавка; МО максимальная отбавка Рис.1.1. Временные диаграммы работы регулирующего органа - угол сдвига сигнала управления ключами Ê 5, Ê 6 в сторону опережения относительно сигнала задающего генератора. - угол сдвига сигнала управления ключами Ê 8, Ê 7 в сторону отставания. Также дополнительным условием задания на курсовую работу является использование симметрирующего трансформатора: Рис.1.2 2. Расчёт параметров нагрузки и коэффициентов трансформации трансформаторов Нестабильность напряжения сети: UC (220 220 20% ) ... (220 220 15% ) 264 ... 187B UC(max) 264 UC(min) 187 Напряжение на выходе Т1: Us (max) Uн 1 20% 1 Us (min) Uн 1 15% 1 1 kT 1 1 kT 1 где Uн-номинальное напряжение сети Напряжения на выходе РО: Us (max) Uн 1 20% kT 2 Us (min) Uн 1 15% kT 2 Для полного использования возможности РО, необходимо, чтобы в режиме отбавки напряжения выполнялось равенство U U U Us (max) U2(max) Uн 2(min) н А в режиме добавки s (min) Составим систему уравнений и найдем коэффициенты трансформации: 1 Uн 1 20% Uн 1 20% 1 170B k k T1 T2 1 Uн 1 15% Uн 1 15% 1 460B kT 1 kT 2 kT 1 0.65 kT 2 1.1 Нагрузка - активная При минимальном выходном напряжении: RH(min) UH(min)2 / SH 1702 / 3000 10Ом При максимальном выходном напряжении: RH(max) UH(max)2 / SH 4602 / 3000 70Ом 3. Расчет силового трансформатора .1 Силовой трансформатор Т1 а) Расчёт параметров Мощность трансформатора PТР U1 I1 264 41,7 11009Вт Примем с запасом PТР 12кВт . Будем вести расчёт трансформатора при синусоидальном напряжении. Данные для расчёта: Действующее значение напряжения U1(d)=264В; Действующее значение тока I1(d)=41,7А; частота f=50Гц; мощность PТР=12000Вт; перегрев. T 50C Расчёт: В качестве материала магнитопровода используем электротехническую сталь с толщиной ленты 0,08мм. Параметры стали марки 3422-0.08: P0=21·10-2 Вт/см3, α=1.3, β=1.6, А=663 А·см/В·с1/2. Учитывая коэффициент резки: A=663·kр=663·1.5=995 А·см/В·с1/2. Определим критическую частоту работы трансформатора по формуле: 3,98 107 50 f кр 2582 Гц. 995 12000 Так как f < fкр, то в выражение для определения объема магнитопровода подставляем f. Определяем объем магнитопровода Vм: Vм 1,5 А k Доб kТ kм 2,5 Р f T 1/ 4 , где Доб - коэффициент добавочных потерь; k ì 0,25 - коэффициент заполнения окна сердечника проводом обмотки; kТ 1,4 - коэффициент определяющий изменение сопротивления медного провода при изменении температуры. k Vм 1,5 995 2,5 1, 4 12000 1/4 15980см3 0, 25 50 50 Тогда К сожалению типовый сердечник подобрать для данного магнитопровода проблематично, поэтому закажем его у фирмы-производителя СТС TECHTRANS (173025, Нечинская 55, Великий Новгород, Россия, +7-8162-730651) по цене 6728 рублей. a t/2 см 8 b t см 16 c t см 16 A 2t см 32 H 3t см 48 h 2t см 32 h1 t/2 см 8 V 4t3 см3 16,4×103 SoSc t4 см4 6,55х104 St 24t2 см2 6,14×103 Максимальная магнитная индукция: Bm Bm 0.156 P f A1 / 4 Vm2 / 3 7/8 0.156 12000 7 8 1,54Тл 6 2/3 50 995 (16400 10 ) 1/4 Число витков первичной обмотки: w1 w1 U1 4.44 f Sсеч Bm ; 264 60,3 4.44 50 128 10 4 1,54 Примем w1=60 и определим w2: w2 w1 60 100 k òð 0,6 Максимально допустимая мощность потерь, излучаемая трансформатором при перегреве на величину Ò : Pизл.max PМП PОБ Т ST 12 50 0,614 368, 4Вт, где α - коэффициент теплоотдачи для естественного охлаждения, равный 2 приблизительно 12 Вт / м С . Коэффициент увеличения электросопротивления провода вследствие нагрева. Для меди при температуре окружающей среды ÒÎ Ñ 20Ñ : kTO 1 0.004 T 1, 2 м м 7650кг / м3 - плотность магнитного материала. Удельные магнитные потери: f Bm 50 21 P' P0 1000 f * Bm * 1, 3 1,54 1 Мощность потерь в магнитопроводе: 1, 6 0,853 PМП P 'V мм 0,853 16, 4 103 7650 107 Вт м м 7650кг / м 3 - плотность магнитного материала. Принимаем плотность тока J1=2∙106 А/м2. Находим площадь поперечного сечения провода первичной обмотки: S пр1 I1 41, 7 А 20,85 106 м 2 J1 2 106 А м2 Диаметр провода первичной обмотки: d1 4Sпр1 4 20,85 106 5,15 103 м 1,7 10 8 Ом м - удельное электросопротивление провода для меди. Коэффициент увеличения сопротивления провода, равный отношению сопротивления провода на переменном токе к сопротивлению провода на постоянном токе k Д принимаем равный единице. Мощность потерь в обмотках: PОБ 2 I1m 2 lвит w1 k Доб kТO Sпр1 2 41, 72 1, 7 108 0, 48 60 2,5 1, 2 245Вт 20,85 106 где lвит =3t/100 =0.48м Мощность излучаемая трансформатором: P PМП PОБ 107 245 352Вт меньше максимально допустимой. Определим перегрев поверхности трансформатора: T P 352 47,8 ST 12 0,614 Перегрев приемлем. Площадь поперечного сечения провода вторичной обмотки: Sпр 2 Sпр1 w1 60 20,85 106 12,51106 м 2 w2 100 Диаметр провода вторичной обмотки: d2 4Sпр 2 4 12,51106 3,99 103 м б) Выбор проводов Для обоих обмоток выбираем токопроводящую жилу ЛЭТЛО ТУ 16.705.030-77, скрученную из эмалированных проводов марки ПЭТВ-2 с изоляцией в виде оплетки из полиэфирных нитей. Таблица Первичная обмотка Вторичная обмотка Номинальное сечение жилы, мм2 20 Число проволок 102 Номинальный диаметр медной проволоки, мм 0,500 Наружный диаметр провода, мм, не более 7,5 12 60 0,500 6 .2 Силовой трансформатор Т2 Начальные данные U1 264 В; K тр 1; U 2 290 В; f 10 кГц; Bm 0.8 Тл; T 60C. В качестве материала магнитопровода выбираем аморфный нанокристалический сплав «Гаммамет» под названием ГМ 24ДС со следующими параметрами Выходная мощность P U 2 Iн 290 50 7250 ВА Рассчитаем мощность трансформатора с учетом КПД и схемотехники исполнения, в данном случае, со средней точкой во вторичной обмотке 1 1 PT P 1 7250 1 14, 72 кВА 0.97 Здесь был принят КПД η=0,97 Далее будет произведен выбор типоразмера. В качестве ключевого параметра выбирается произведение площади сечения магнитопровода на площадь окна. 1 1 y Pt 104 1472 104 Sc So 3 4K B f K K 4 1 0.8 40 10 468 0.4 j И Ф m KФ 1; К И 0.4 коэф. использования окна медью. 1.13 41.395 см 4 K j 468 коэф. зависящий от перегрева и геометрии сердечника Принимаем решение увеличить рассчитанное значение, так как возможен перегрев. Выбираем сердечник из стандартного ряда ПЛ 16 30 40 со следующими параметрами Конструкция и размеры 2 Площадь сечения магнитопровода Sc 4.64 см 2 Площадь окна Sок 10см Произведение Sc Sok 46.4 см Геометрические размеры: a=1.6 см, b=4 см, с=2,5 см, h=4 см А=5.7см lср=18см, Н=7.2см Поверхность теплоотвода рассчитаем по формуле: 4 St 2 A b 2 H b 2 c b 2 h b 4 ( 2a c) ( h1) 4 h a 186.24 При последующей намотке провода, поверхность теплоотвода увеличится. Принимаем это увеличение в два раза больше, относительно рассчитанной. Число витков в первичной обмотке рассчитывается по формуле W1 U1 104 264 104 17.78 витков 4 Bm f Sc 4 0.4 10 103 4.64 Ток в первичной обмотке равен I1 P 7250 28.311 А U1 264 0.97 Плотность тока j K j (Sc Sок ) y 0.4 (4.64 46.4)0.14 273.485 А / см2 - допустимо для медного провода. Рассчитаем сечение провода первичной обмотки для данной плотности тока: Sпр 2 k2 I1 100 10.352 мм2 j Выбираем провода марки ПСТД d 3.65 мм; Сопротивление первичной обмотки R1 lсрW1 106 17.78 18 2.72 106 8.705 104 Ом , где ρ=2,72 мкОм/см - удельное сопротивление меди. Потери в меди первичной обмотки P1 I12 R 28.4852 8.705 104 0.698 Вт Число витков вторичной обмотки W2 W1U 2 18 290 19.531витков U1 264 Рассчитаем сечение провода вторичной обмотки для данной плотности тока: Sпр 2 I1 100 9.141мм 2 j Выбираем провода марки ПСТД d 3.45 мм; Сопротивление вторичной обмотки R2 lсрW2 106 18 19.531 2.72 106 9.562 104 Ом Потери в меди вторичной обмотки P2 I 2 R2 25 2.412 104 0.598 Вт 2 2 Общие потери в меди Pm P1 P2 0.698 0.598 1.295 Вт Теперь рассчитаем потери в сердечнике. Удельные потери в магнитопроводе рассчитываются по формуле 1.85 B Pуд 4.4 f 1.48 m 5200 4.4 10 103 1.48 1.85 0.8 5200 465.764 Вт / кг Потери в сердечнике определяются по формуле Pc Pуд M 465.764 4.315 104 0.201Вт, где M 4.315 104 кг массасердечника(из таблицы) Суммарные потери в трансформаторе определяются потерями в магнитопроводе и обмоточных проводах, рассчитаем их: P Pm Pc 1.195 0.201 1.496 Вт Рассчитаем перегрев трансформатора Tрасч P 1.496 6.696 C St k 186.24 1.2 103 4. Силовые ключи и драйверы а) Расчёт параметров Максимальные напряжения на ключах в закрытом и токи через них в открытом состояниях: Демодулятор (К5-К8): UK 5K 8(max) 2 UC.m(max) / kTP IK 5K 8(max) Iвых .m(max) Инвертор (К1 - К4): 2 264 / 1,1 336B 2 Pвых / Uвых (min) . 2 3000ВА / 170В 25А UK 1K 4.(max) 2 UC.m(max) 2 264 373B . IK 1K 4(max) Iвых .m(max) / kTP 25А / 1,1 22,5А . При таких токах и напряжениях целесообразно использовать IGBT-транзисторы. Поскольку IGBT-транзистор не пропускает ток в обратном направлении, то для коммутации переменного напряжения необходимы ключи переменного тока, состоящие из двух транзисторов и двух встречно-параллельных им диодов (рис.4.1) Рис.4.1. Силовой ключ переменного тока б) Выбор элементов Выбраны транзисторы со встроенными обратными диодами фирмы АРТ (Microsemi). Сайт www.microsemi.com ДЕМОДУЛЯТОР И ИНВЕРТОР (APT30GS60BR) Выбран драйвер CONCEPT 2SC0108T (сайт www.igbt-driver.com) двухканальный драйвер. Оба канала гальванически развязаны от входной цепи и между собой. Выходной ток драйвера : 8A . Выходное напряжение : 15 / 8B . Рис.4.2. Блок-диаграмма драйвера Рис.4.3. Схема подключения драйвера Чтобы использовать встроенную защиту от короткого замыкания необходимо подключение к коллектору транзистора. В связи с особенностями схемы это делать не желательно, поэтому оставим выводы драйвера VCEx и REFx не подключенными. Защиту от короткого замыкания сделаем более просто, контролируя ток нагрузки (пункт IV курсовой работы). Подключаем два транзистора к одному драйверу. На 16 транзисторов нужно 8 штук. 5. Выходной фильтр а) Расчёт параметров Выходное напряжение формируется из суммы напряжений сети и демодулятора. Считаем, что на вход преобразователя поступает чистая синусоида без гармоник. В сигнале демодулятора кроме полезной гармоники на частоте сети присутствуют также паразитные гармоники около частот, кратных частоте ШИМ. Таким образом, амплитуды гармоник в составе выходного напряжения равны амплитудам гармоник напряжения демодулятора. Задача фильтра - подавить эти гармоники с определённым коэффициентом и выделить полезную гармонику. Рис.5.1. Вид гармоник около частоты ШИМ Коэффициент гармоник на выходе фильтра : KÃ UR2 (U R(d ) KR )2 (UL(d ) KL)2 UH(d ) , 2 и UL - действующие значения правой и левой гармоники, KR и KL кoэффициенты передачи правой и левой гармоники. Разложим напряжение демодулятора в ряд Фурье: sin(n ) n n 1 N UÄÌ (t ) Em sin(Ct ) Em T T sin (n C ) t n sin ( n ) t n C 2 2 Амплитуды гармоник напряжения: Um(n) Em sin(n ) n Передаточная функция фильтра с нагрузкой: W p, L, C RH L C RH p (RH R C L) p R RH 2 W(, L, C) W( j , L, C) Коэффициенты передачи гармоник напряжения (правой и левой): KR (n, L, C) W(n K C , L, C) KL(n, L, C) W(n K C , L, C) Выражение для коэффициента гармоник: 2 10 Em sin(n ) Em sin(n ) K ( n , L , Ñ ) KL(n, LÔ , ÑÔ ) R Ô Ô n n n 0 2 n 0 2 Em UC(d ) 2 10 KÃ 2 При расчёте и выборе параметров фильтра необходимо учитывать несколько факторов: коэффициент гармоник не должен превышать заданный; выброс АЧХ не должен быть слишком большим, не более 1,5; ток через индуктивность не должен превысить максимально допустимый ток транзисторов. Расчёт ведём с помощью программы “Mathcad” при максимальном сопротивлении нагрузки. Наихудший случай (максимальный коэффициент гармоник и максимальный ток через конденсатор) получился при отбавке с γ = 0,63 и минимальном напряжении на нагрузке. L 800 106Ãí 6 Рассчитанные значения: Ñ 3 10 Ô Коэффициент гармоник при этом КГ 0.973. Рис.5.2. Форма АЧХ: Передаточная функция для тока: WIc p, L, C p C RH L C RH p (RH R C L) p R RH 2 WIc (, L, C) WIc ( j , L, C) Коэффициенты передачи гармоник тока (правой и левой): KIR (n, L, C) WIc (n K C , L, C) KIL(n, L, C) W(n K C , L, C) 50 sin(n ) T T IC (t ) Em sin (n K C ) t n K KIR (n, L, C) sin (n K C ) t n K KIL(n, L, C) 2 2 n 1 n Рис.5.3. Ток через конденсатор Максимальный ток составляет 2А. Действующее значение тока: 2 2 2 10 10 E WIc (C , L, C) Em sin(n ) Em sin(n ) IRMS m K ( n , L , Ñ ) KIL(n, LÔ , ÑÔ ) IR Ô Ô n n 2 n 1 2 n 1 2 IRMS 0,987À б) Выбор элементов Конденсатор: Выбран металлизированный полипропиленовый плёночный в алюминиевом корпусе. Точность ±5%. Дроссель: Расчет выходного фильтра Исходные данные для расчета: L=8мкГн, I=25 А, f=10 кГц, ΔI=1 А, ΔT=60°С. Запасаемая энергия в дросселе рассчитывается по формуле: I 1 L I 0.0008 25 2 2 WЭ 0.26 Дж 2 2 2 2 Рассчитаем коэффициент формы тока: KФ I 1 25 2 2 1.02 2 I 2 1 I 252 12 12 I Для выбора типоразмера сердечника дросселя находим произведение сечение сердечника на площадь его окна: 1 2WЭ 104 1 y 4 SC SO 76.778 см Bm K И K j KФ В этой формуле Bm=0.7 Тл - индукция насыщения материала. Мы выбрали сердечник из Гаммамет 54ДС. Kи=0.4 - коэффициент использования окна, принимаем сами. K j 365 и y 0.13 - параметры, зависящие от геометрии и исполнения сердечника, которые берутся из таблицы для заданного значения перегрева. Площадь сечения магнитопровода К12х8х5 SC 7 см 2 2 Площадь окна SО 11см 4 Произведение площадей сечения и окна SC SO 77 см d 8 см, D 12 см, h 5 см. Объем магнитопровода найдем по формуле 2 2 D d Vm h h 314.159 см3 2 2 Средняя длина витка для данного сердечника вычисляется по следующей формуле lср _ в d d2 2 2h 1 K 2 0.5 D d 0.5 D d d (1 K ) 1 K 4 16 1 2 25.487 см Коэффициент К=0,45. Рассчитаем поверхность теплоотвода сердечника, учитывая обмотку: St 2 D d K h D d K D 593.95 см2 2 2 d D K 2 2 Средняя длина магнитной силовой линии lср (D d ) 2 31.416 см Найдем плотность тока в обмотке: j K j (Sc So ) 207.515 А / см Зная плотность тока и сам ток через обмотку, находим необходимое сечение провода y Sm 2 Id 50.001 0.144 см2 j 346 , отсюда находим расчетный диаметр провода d расч 2 Sm 0.144 2 0.429 см 2 2 В соответствии со стандартом, выбираем провода марки ПСТД: Тип Диаметр, мм ПСТД 4 Диаметры с изоляцией, мм 4,33 Сечение, мм2 0,4 Сечение с изоляцией, мм2 0,433 2 Рассчитаем эффективную площадь окна Sоэ So 0.75 8.25 см Находим число витков дросселя W Sоэ 0.6 34 витка Sиз Рассчитаем магнитную проницаемость сердечника L lср 0 W S c 2 100 0.0008 25.487 100 252.844 4 107 342 7 Рассчитаем сопротивление обмотки R lср _ в W 106 15 103 Ом , где ρ=2,72 мкОм/см - удельное сопротивление меди. Мощность, рассеиваемая в меди, находится по формуле: Pm I 2 R 1.457 Вт Рассчитаем индукцию, амплитуда переменной составляющей находим из выражения B 0 I W 100 2 lср 0.015 Тл Постоянная составляющая индукции: B 0 I W 100 0.773 Тл lср Максимальная индукция Bmax B B 0.789 Тл Рассчитаем потери в сердечнике: Удельные потери в магнитопроводе определяются по графику удельных 3 потерь, при частоте 40 кГц Pуд 0.06 Вт / см , тогда в сердечнике рассеивается Pc Pуд Vm 0.06 341.159 18.85 Вт Суммарные потери в дросселе складываются из потерь в сердечнике и потерь а обмотке. Находим суммарные потери: P Pc Pm 20.306 Вт Рассчитаем перегрев: Tрасч P 20.306 28.49C k St 1.2 103 593 Перегрев не превышает допустимый, что говорит о верности проведенного проектирования. 6. Моделирование силовой части K K1 Kbreak COUPLING = 0.99 Z9 Z10 IXGR60N60U1 2 1 Lbreak Z13 Z14 IXGR60N60U1 2 3 3 IXGR60N60U1 2 3 3 1 IXGR60N60U1 2 1 R5 10 1 R7 10 10 + - E5 + - L1 E7 + - + - V K5 K7 K6 K8 0 0 + - Lbreak E6 L5 1 + - + - 9 2 + - L2 R6 10 0.8mH E8 R8 10 C1 3u Uc 1 VOFF = 0 VAMPL = 187 FREQ = 50 2 R9 K1_K4 V1 V1 = 0 V2 = 10 TD = 0 TR = 10n TF = 10n PW = 100u PER = 200u 0 K2_K3 V1 = 10 V2 = 0 TD = 0 TR = 10n TF = 10n PW = 100u PER = 200u K K2 1 3 3 Kbreak COUPLING = 0.99 2 IXGR60N60U1 Z12 IXGR60N60U1 L4 V7 0 Z15 0 L3 Lbreak 0 11 Z2 1 V8 1 R1 10 1 1 0 E1 + - + - 0 K2_K3 K6 K1_K4 0 R2 10 0 1 2 Z4 IXGR60N60U1 R4 10 1 3 3 0 E4 - V6 + V1 = 10 V2 = 0 TD = 175u TR = 10n TF = 10n PW = 100u PER = 200u E2 + - V5 + - + - V1 = 0 V2 = 10 TD = 175u TR = 10n TF = 10n PW = 100u PER = 200u E3 K2_K3 0 beta IXGR60N60U1 2 R3 10 K1_K4 K5 Z5 Z6 IXGR60N60U1 2 3 3 K8 + - V1 = 0 V2 = 10 TD = 25u TR = 10n TF = 10n PW = 100u PER = 200u IXGR60N60U1 10 0 1 2 Z3 IXGR60N60U1 Рис.6.1 Схема силовой части в среде Orcad. Рис.6.2 Напряжение на входе фильтра RH 70 2 Lbreak + - K7 3 3 V2 Z1 V1 = 10 V2 = 0 TD = 25u TR = 10n TF = 10n PW = 100u PER = 200u 2 V 0 1 IXGR60N60U1 Z16 Z11 1 IXGR60N60U1 IXGR60N60U1 2 3 3 2 alfa 1 2 Z8 IXGR60N60U1 1 3 3 2 IXGR60N60U1 Z7 Рис.6.3 Напряжение на входе фильтра (увеличенное) Рис.6.4 Напряжение на трансформаторе Т2 Рис.6.5 Напряжение на ключах демодулятора Рис.6.6 Импульсы управления демодулятора Рис.6.7 Напряжение на выходе стабилизатора Рис.6.8 Напряжение на выходе стабилизатора (увеличенное) 7. Оценка энергетической эффективности разработанного устройства Эффективность стабилизатора определяется его КПД. Основная часть потерь приходится на транзисторы. Поскольку расчёт потерь при данном виде модуляции достаточно сложен, оцениваем эффективность устройства с помощью моделирования с использованием моделей реальных транзисторов (взяты с сайта производителя). Определяем с помощью моделирования среднюю мощность потерь в каждом ключе в различных режимах. Вероятно, наибольшие потери будут при наибольшем напряжении сети. Наибольшие потери - в режиме максимальной отбавки. Потери в демодуляторе Рис.7.1. Рис.7.2. Потери в инверторе Рис.7.3. Рис.7.4. Суммарные потери: Pï î ò PÈ 1 PÈ 2 PÄÌ 1 PÄÌ 2 380 360 400 360 1500Âò . 3000 100% 68% 3000 1500 . КПД преобразователя составляет Наименьшие потери при прямой передаче. Трансформатор работает на холостом ходу, ток из сети протекает только через ключи демодулятора. III. Расчёт параметров системы управления Рис. Принципиальная схема системы управления 1. Выбор измерительного трансформатора и элементов для системы управления Согласно напряжению на выходе стабилизатора переменного напряжения выберем измерительный трансформатор TV3 Выбираем измерительный трансформатор с параметрами, приведенными в табл.1. Дополнительные характеристики: Пульсация, %…………………..…………….……0,04 Время установления ,с…………………..………….0,1 Параметры источника питания: •напряжение, В…………………………….220, 240 •частота, Гц………………….………………..49-600 Температура окружающей…………...…от минус 30 до плюс 50°С Относительная влажность, %……………………….от 30 до 80 Масса, кг…………………………..…..………....0,4 Таблица 1.Основные характеристики трансформатора Е842/1. Наименование и тип Класс прибора точности, % 1 Преобразователь Е842/1 2 1,0 Диапазон измерения Сопротивление сигналов нагрузки вход 3 0-600В выход 4 0-5 В Потребляемая мощность 5 6 0...2,5 кОм (любое 1,0 В·А значение в указанном диапазоне без подстройки преобразователя Габаритные размеры , мм 7 80х80х90 Для определения действующего значения будет использована микросхема DA1 (AD736) со следующими параметрами: Схема подключения: Выберем вычетатель DA3: Данная схема предназначена для получения разности двух напряжений, при этом каждое из них предварительно умножается на некоторую константу (константы определяются резисторами). Если R1=R2=Rf=Rg имеем: Vout=(V1-V2) Разработка схемы генератора тактовых импульсов и генератора пилообразного напряжения Используем микросхему ICL8038, которая представляет из себя генератор высокой точности прямоугольного, синусоидального, треугольного, пилообразного импульсов с минимум внешних компонентов. Особенности: диапазон частот получения сигнала: 0.001Гц…300кГц диапазон коэффициента заполнения для прямоугольного импульса: 2-98% Низкие искажения для синусоидального сигнала 1% Высокая линейность для треугольного сигнала: 0.1% высокий уровень выходного напряжения: TTL…28В Типовая схема включения микросхемы Рассчитаем номиналы компонентов схемы для ГТИ с периодом 100мкс: рассчитаем время импульса по формуле: Выберем Ra=1кОм Следовательно, С t1 0.66 0.0001 0.66 66, 4нФ RA 1000 время спада равняется времени нарастания то RB выбирается равным RА RB=1кОм. Сопротивление RL=4.7кОм. Для получения спадающей пилы используем источник +10В из которого будем вычитать нарастающую пилу. Для операции вычитания используем вычетатель на операционном усилителе: Данная схема предназначена для получения разности двух напряжений, при этом каждое из них предварительно умножается на некоторую константу (константы определяются резисторами). Если R1=R2=Rf=Rg=10Ом имеем: Vout=(V1-V2) 2. Моделирование системы управления 0 U13 0 1 2 3 E1 + - + - E V R1 10 4 5 6 7 COM VS VOUT CAV V2 AD736 R2 F1 CC VIN CF NVS 10 10 C1 V7 0 10 0 0 F 33u 0 V1 C2 VOFF = 0 VAMPL = 187 FREQ = 50 5 10u C3 R3 2k 100n 0 0 0 V+ 1 + 0 - 2 V6 V1 = 0 V2 = 20 TD = 0 TR = 199.99u TF = 1n PW = 1u PER = 200u 0 Рис.2.1. Схема модели системы управления Рис.2.2. Напряжение на входе AD736 V3 V V- OUT AD648A 3 OUT 4 0.1055 4 V R4 AD648A 3 1k V- 1 + V4 U17A V+ 8 V5 U18A 8 10 15 - 3 2 0 0 0 Рис.2.3. Напряжение на выходе AD736 ПИ-регулятора Рис.2.4. Импульсы управления демодулятором и входное напряжение Заключение В ходе проделанной курсовой работы был разработан стабилизатор переменного напряжения (силовая часть и система управления) с довольно неплохими показателями стабилизации. Отклонение выходного напряжения не превышает 1%, так же была освоена методика расчета фильтра по известной величине коэффициента гармоник. Список литературы 1. Стабилизаторы переменного напряжения с высокочастотным широтно-импульсным регулированием/ А.В. Кобзев, Ю.М. Лебедев, Г.Я. Михальченко . А. Дж. Пейтон, В. Волш Аналоговая электроника на операционных усилителях. . Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство. . Мелешин, В.И. Транзисторная преобразовательная техника / В.И. Мелешин. - М.: Техносфера, 2005. - 632 с. . Источники электропитания радиоэлектронной аппаратуры: справочник / под. ред. Г.С. Найвельта. - М.: Радио и связь, 1985. - 210 с. . Александров, К.К. Электротехнические чертежи и схемы / К.К. Александров, Е.Г. Кузьмина. - М.: Энергоатомиздат, 1990. - 288 с.