Корнеев С.А. Принцип объективности и его применения при построении определяющих соотношений с точностью до скалярных коэффициентов
реклама

Математическое моделирование систем и процессов. 2007. № 15
УДК 531
С.А. Корнеев
Омский государственный технический университет
ПРИНЦИП ОБЪЕКТИВНОСТИ И ТЕХНИКА
ЕГО ПРИМЕНЕНИЯ ПРИ ПОСТРОЕНИИ
ОПРЕДЕЛЯЮЩИХ СООТНОШЕНИЙ С ТОЧНОСТЬЮ
ДО СКАЛЯРНЫХ КОЭФФИЦИЕНТОВ
Abstract
The traditional technique of application of the principle of
material objectivity with the purpose of development of not thermodynamic methods of construction of the vector-valued and tensorvalued constitutive relations accurate to scalar factors is improved.
The alternative conclusion of the known Noll formula describing replacement of frame of reference is resulted, the prominent features
are revealed. The order of application of the offered method is illustrated for concrete examples.
Принцип объективности1 подразумевает наличие изотропии
и однородности пространства: изменение системы отсчёта (т.е. наблюдателя) не должно сказываться на поведении материала. Данный
принцип не связан с требованиями материальной однородности
и изотропности самого материала, материально неоднородные и анизотропные материалы также удовлетворяют этому принципу.
Особенности традиционной техники применения принципа
объективности можно иллюстрировать на примере упругого материала [1, 2]. По определению упругим называется материал, у которого определяющее соотношение для тензора напряжений T является функцией градиента деформации F :
T = Φ(F ) .
(1)
1
Принцип объективности называют также принципом материальной
индифферентности, принципом объективности поведения материала, принципом
материальной независимости от системы отсчёта, принципом равноправия систем
отсчёта или условием реологической инвариантности [1–5].
97
С.А. Корнеев
Здесь F = ∂x(t , X ) ∂X , x(t , X ) – закон движения ( X , x – радиусвекторы одной и той же материальной точки в отсчётной и актуальной конфигурациях соответственно, t – время). По принципу объективности, если в одной из систем отсчёта (без звёздочки) выполняется соотношение (1), то в другой системе отсчёта (со звёздочкой)
имеет место аналогичное по виду соотношение
( )
T∗ = Φ F ∗ .
(2)
С помощью формул перехода
T∗ = Q ⋅ T ⋅ Q T , F ∗ = Q ⋅ F ,
(3)
где Q = Q(t ) – ортогональный тензор, характеризующий относительный поворот систем отсчёта, на основании (1), (2) получается равенство
Q ⋅ Φ(F ) ⋅ QT = Φ(Q ⋅ F ) .
4)
Если учесть формулу полярного разложения Коши
F = R⋅U = V⋅R
(5)
и положить в (4) Q = RT , будем иметь
Φ(F ) = R ⋅ Φ(U ) ⋅ RT .
(6)
Здесь V , U – левый и правый тензоры чистого растяжения соответственно (симметричные, положительно определённые тензоры), R –
сопутствующий деформации ортогональный тензор вращения.
Таким образом, на основании (1), (6)
T = R ⋅ Φ(U ) ⋅ RT .
Установить большее о свойствах симметричной тензорной функции
Φ(U ) из принципа объективности не удаётся по причине того, что
тензор U инвариантен: U∗ = U .
Если ограничиться случаем изотропного материала и взять
в качестве отсчётной неискажённую конфигурацию [1], то тогда
в дополнение к (1) можно записать
(
)
Φ(F ) = Φ F ⋅ OT ,
(7)
где O – ортогональный тензор, описывающий произвольный поворот неискажённой конфигурации. Заменив в (7) тензор F тензором
O ⋅ F , получим
98
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
(
)
Φ(O ⋅ F ) = Φ O ⋅ F ⋅ OT .
(8)
Но согласно принципу объективности, записанному в форме (4) при
Q = O , имеем
O ⋅ Φ(F ) ⋅ OT = Φ(O ⋅ F ) .
Совместно (8), (9) приводят к равенству
(
(9)
)
O ⋅ Φ(F ) ⋅ OT = Φ O ⋅ F ⋅ OT .
(10)
С другой стороны, благодаря произвольности тензора O , в (7)
можно принять O = R и получить со ссылкой на формулу (5) выражение
Φ(F ) = Φ(V ) ,
которое означает допустимость замены в (10) тензора F тензором V :
(
)
O ⋅ Φ(V ) ⋅ OT = Φ O ⋅ V ⋅ OT .
(11)
Таким образом, согласно (11) для изотропных упругих материалов функция Φ(V ) является изотропной тензорной функцией симметричного тензора V . Только после этого можно применить известную теорему об изотропных тензорных функциях [6] и установить зависимость Φ(V ) с точностью до скалярных коэффициентов:
T = Φ(V ) = χ 0I + χ1V + χ 2 V 2 ,
(
χ k = χ k trV , trV 2 , trV 3
) (k = 0 , 1, 2) .
(12)
Пример вывода соотношения (12) наглядно показывает, каких
усилий требует традиционный метод получения определяющих соотношений даже в случае изотропного упругого материала. Поэтому
при построении сложных математических моделей материалов полезно располагать усовершенствованной методикой применения
принципа объективности, которая позволяла бы достаточно просто
устанавливать определяющие соотношения с точностью до скалярных коэффициентов.
Формулы перехода при замене системы отсчёта
Под системой отсчёта понимается совокупность тела отсчёта
связанной с ним базисной декартовой системы координат (O , i1 , i 2 , i 3 )
и некоторых часов [7, 8]. Тело отсчёта считается абсолютно твёрдым.
Поэтому относительное движение систем отсчёта является жёстким
99
С.А. Корнеев
движением, складывающимся из поступательного перемещения и поворота вокруг некоторой оси на определённый угол.
По теореме Нолла [9] переход от «старой» системы отсчёта
(без звёздочки) к «новой» системе отсчёта (со звездочкой) описывается формулами
x∗B − x∗A = Q ⋅ (x B − x A ) , t ∗ = t + a ,
(13)
где a – число, определяющее сдвиг отсчёта времени; A и B – некоторые точки, имеющие в моменты времени t , t ∗ радиус-векторы x A ,
x∗A и x B , x∗B в «старой» и «новой» системе отсчёта соответственно;
Q = Q(t ) – собственный ортогональный тензор ( det Q = 1 ).
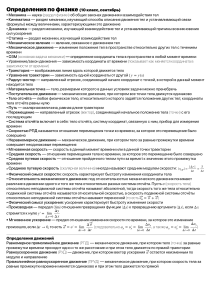
Поясним порядок вывода формулы Нолла (13). Пусть имеются
две системы отсчёта, у которых базисные системы координат
(O , i1 , i 2 , i 3 ) , O∗ , i1∗ , i∗2 , i∗3 меняют взаимное расположение с течением
(
)
времени (рис. 1, а). Зафиксируем произвольно выделенный момент
времени, которому отвечают показания часов t , t ∗ соответствующей
системы отсчёта. Возьмём две материальные точки A и B , которые
в общем случае могут принадлежать разным телам. Обозначим через
∗
AB вектор, характеризующий взаимное расположение точек A , B
по отношению к наблюдателю @ ∗ новой системы отсчёта, а через
AB – вектор, характеризующий взаимное расположение точек A , B
по отношению к наблюдателю @ старой системы отсчёта:
()
∗
AB = rAB t ∗
@∗
, AB = rAB (t ) @ .
(14)
Так как оба наблюдателя используют одинаковый математический
аппарат тензорного исчисления, а орты i ∗k расположены относительно наблюдателя @ ∗ новой системы отсчёта точно так же, как расположены орты i k относительно наблюдателя @ старой системы отсчёта (см. рис. 1, а), то с формальной математической точки зрения
i ∗k
@∗
= ik
@
= эk ,
(15)
где э k – абстрактные (обезличенные) единичные векторы ( k = 1, 2, 3).
100
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
i3
AB
i ∗3
AB
i ∗2
i2
O
xB
э3
x∗B
B
∗
O∗
i1
i 1∗
r AB
xA
э2
x∗A
э1
A
б
а
Рис. 1. Взаимное расположение систем отсчёта
и материальных точек A , B в произвольный момент времени
∗
В абстрактном базисе э k векторы AB , AB связаны формулой
(рис. 1, б)
∗
AB = Q ⋅ AB ,
(16)
где Q = Q(t ) – некоторый ортогональный тензор. Формула (16) ука∗
зывает, что вектор AB получается из вектора AB жёстким поворотом. Согласно рис. 1, а
∗
() ()
AB = x∗B t ∗ − x∗A t ∗ , AB = x B (t ) − x A (t ) .
Отсюда на основании (16) приходим к формуле Нолла (13). Остаётся
только выяснить кинематический смысл тензора Q .
Для наблюдателя @ старой системы отсчёта орты i k переходят в орты i ∗k посредством жёсткого движения:
i ∗k
@
= O(t ) ⋅ i k
@
,
(17)
где O(t ) – собственный ортогональный тензор, характеризующий
вращение новой системы отсчёта относительно старой системы отсчёта. С другой стороны, принимая в формулах (14), (16) за точку A
начало вектора i ∗k , а за точку B – его конец, имеем
101
С.А. Корнеев
i ∗k
@∗
= Q ⋅ i ∗k
@
.
(18)
Подставляя (17) в (18), находим
i ∗k
@∗
= Q ⋅ O(t ) ⋅ i k
@
или с учётом (15)
э k = Q ⋅ O(t ) ⋅ э k .
Отсюда следует, что Q ⋅ O(t ) = I и по свойству ортогональных тензоров
Q = OT (t ) .
(19)
Таким образом, тензор Q характеризует вращение старой системы
отсчёта относительно новой системы отсчёта. На основании (17), (19)
[
]
Q(t ) = i k i ∗k (t )
@
.
Начальное значение тензора Q(t0 ) зависит от выбора взаимной ориентации ортов базисных систем координат i k , i ∗k . Если при t = t0
базисные системы координат обеих систем отсчёта совпадают, то
Q(t0 ) = i k i k = I , где I – единичный тензор.
При использовании принципа объективности могут возникнуть две принципиально разные ситуации. Первая ситуация заключается в следующем. Есть два наблюдателя (две системы отсчёта,
одна из которых, например, связана с Землёй, а другая – с Луной),
у каждого из них одинаковые экспериментальные установки, на которых проводятся опыты с одним и тем же материалом по единой
методике. В ходе измерений каждый из наблюдателей определяет
своё значение тензора напряжений в соответствующей точке материала, в соответствующий момент времени:
T∗
@∗
= Trs∗ i ∗r i ∗s
@∗
, T @ = Trs i r i s
@
.
По принципу объективности у обоих наблюдателей численные значения компонентов тензора напряжений должны быть равными,
Trs∗
102
@∗
= Trs
@
.
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
Отсюда с учётом (17) – (19) приходим к цепочке равенств:
T∗
@∗
= Trs∗i ∗r i ∗s
@∗
= Trs @ Q ⋅ O ⋅ i r
= Trs @ Q ⋅ i ∗r
Q ⋅ O ⋅ ir
@
@
@
Q ⋅ i ∗s
@
=
= Trs i r i s @ = T @
,
(20)
которая показывает, что у обоих наблюдателей будет получаться
одинаковый результат не только для компонентов, но и для тензора
напряжений в целом. Такой вывод следовало ожидать, если исходить
из требования равноправности обоих наблюдателей и тождественности методик проведения экспериментов. Однако здесь сразу же встаёт
вопрос о непротиворечивости результата (20) и первой формулы (3).
Чтобы показать, что возникшее противоречие является кажущимся, рассмотрим вторую возможную ситуацию: оба наблюдателя
описывают один и тот же процесс деформирования материала и сопоставляют результаты своих измерений с результатами измерений
другого наблюдателя (рис. 2). Для согласования с первой формулой
(3) примем следующие обозначения для значений тензора напряжений в точке среды M относительно каждой из систем отсчёта:
T∗ ≡ T ( t ∗ , M ) = Trs ( t ∗ , M ) e r ( t ∗ , M ) e s ( t ∗ , M ) ,
@∗
@∗
T ≡ T ( t , M ) @ = Trs ( t , M ) e r ( t , M ) e s ( t , M ) @ ,
(21)
где (e1 , e 2 , e3 ) – некоторый, произвольно взятый базис (см. рис. 2).
По принципу объективности для обоих наблюдателей численные
значения компонентов тензора напряжений должны быть равны,
Trs ( t ∗ , M )
@∗
= Trs ( t , M ) @ .
(22)
С другой стороны, принимая в (14), (16) за точку A начало вектора
e k , а за точку B – его конец, придём к равенству:
ek ( t ∗ , M )
@∗
= Q ( t ) ⋅ ek ( t , M ) @ .
(23)
На основании (21) – (23) можно записать цепочку равенств
T∗ = Trs e r e s
@∗
(
)
= Trs Q ⋅ e r Q ⋅ e s @ = Q ⋅ Trs e r e s @ ⋅ QT = Q ⋅ T ⋅ QT .
(24)
103
С.А. Корнеев
Из существа вывода (24) становится понятным, что первая формула
(3) является формулой перехода, по которой пересчитывается значение тензора напряжений (в данной точке среды, в данный момент
времени) при замене системы отсчёта.
i 1∗
i3
i2
rOO∗
O
i1
i ∗3
O∗
n
e3
i ∗2
rO∗M
rOM
e2
e1
M
Рис. 2. Процесс деформирования среды в разных системах отсчёта
Обращаясь к формулам (13), положим, что отсчёт времени в обеих системах отсчёта одинаков ( a = 0 ), и совместим точку A (полюс)
с началом базисной системы координат O ∗ «новой» системы отсчёта,
а точку B с материальной точкой среды M (см. рис. 2). В этом случае
по формулам (13) будем иметь
( )
[
]
t ∗ = t , x∗ t , X∗ = Q(t ) ⋅ x(t , X) − xO∗ (t ) .
(25)
Здесь (см. рис. 2)
xO ∗ (t ) = rOO ∗
@
, x(t , X ) = rOM
@
(
)
, x∗ t , X∗ = rO ∗ M
@∗
– закон движения точки О* относительно «старой» системы отсчёта, законы движения среды относительно «старой» и «новой» системы отсчета
соответственно; X , X∗ – радиус-векторы точки M при t = t0 (в отсчёт-
ной конфигурации относительно соответствующей системы отсчёта):
(
)
X = x(t0 , X ) , X∗ = x∗ t0 , X∗ .
Для двух бесконечно близких точек среды из (25) вытекают равенства
dx∗ = Q ⋅ dx , dX∗ = Q 0 ⋅ dX ,
(26)
где для простоты записи приняты обозначения Q = Q(t ) , Q 0 = Q(t0 ) .
104
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
С другой стороны, по определению градиента деформации
dx∗ = F∗ ⋅ dX∗ , dx = F ⋅ dX .
(27)
Совместно выражения (26), (27) приводят к формуле перехода
F∗ = Q ⋅ F ⋅ QT0 ,
(28)
поскольку
dx∗ = F∗ ⋅ dX∗ = F∗ ⋅ Q 0 ⋅ dX , dx∗ = Q ⋅ dx = Q ⋅ F ⋅ dX ⇒
F∗ ⋅ Q 0 ⋅ dX = Q ⋅ F ⋅ dX .
По формуле полярного разложения (5) и формуле перехода
(28) имеем
(
)(
)
= (Q ⋅ V ⋅ Q )⋅ (Q ⋅ R ⋅ Q ) .
F∗ = R ∗ ⋅ U∗ = Q ⋅ (R ⋅ U ) ⋅ QT0 = Q ⋅ R ⋅ QT0 ⋅ Q 0 ⋅ U ⋅ QT0 ,
F ∗ = V ∗ ⋅ R ∗ = Q ⋅ (V ⋅ R ) ⋅ QT0
T
T
0
Отсюда ввиду единственности разложения (5) находим
R ∗ = Q ⋅ R ⋅ QT0 ,
(29)
U ∗ = Q 0 ⋅ U ⋅ QT0 ,
(30)
V ∗ = Q ⋅ V ⋅ QT .
(31)
В частном случае, когда Q 0 = I , формулы (28) – (31) принимают
традиционный вид
F ∗ = Q ⋅ F , R ∗ = Q ⋅ R , U ∗ = U , V ∗ = Q ⋅ V ⋅ QT .
В соответствии с этим тензор нулевого ранга (скаляр) α , первого
ранга (вектор) a и второго ранга (просто тензор) A будем называть
инвариантным, если при замене системы отсчёта имеют место равенства:
α ∗ (t ) = α(t ) , a∗ (t ) = Q 0 ⋅ a(t ) , A ∗ (t ) = Q 0 ⋅ A(t ) ⋅ QT0 .
(32)
Если же при замене системы отсчёта выполняются равенства:
α ∗ (t ) = α(t ) , a∗ (t ) = Q(t ) ⋅ a(t ) , A ∗ (t ) = Q(t ) ⋅ A(t ) ⋅ QT (t ) ,
(33)
105
С.А. Корнеев
то величины α , a , A будем называть объективными тензорами соответствующего ранга. Ясно, что объективные и инвариантные скаляры принадлежат одному множеству1, тогда как векторные и тензорные величины в общем случае либо объективны, либо инвариантны, либо ни то и ни другое. Исключение составляют нулевой
вектор, нулевой тензор и единичный тензор. Для последнего
I ∗ = Q(t ) ⋅ I ⋅ QT (t ) = Q(t ) ⋅ QT (t ) = I , I ∗ = Q 0 ⋅ I ⋅ QT0 = Q 0 ⋅ QT0 = I .
Эквивалентные формулировки принципа детерминизма
По принципу детерминизма во всех системах отсчёта тензор
напряжений2 описывается одинаковым по виду определяющим соотношением [1–3]. Иными словами, если в одной из систем отсчёта
тензор напряжений описывается функционалом
τ=t
T(t , X ) = ℑ [x(τ , Y ), θ(τ , Y )] ,
τ = −∞
(34)
∀Y
то в любой другой системе отсчёта справедливо аналогичное соотношение
(
)
τ∗ = t ∗
[ (
) (
)]
T∗ t ∗ , X∗ = ∗ ℑ x∗ τ , Y∗ , θ∗ τ∗ , Y∗ ,
τ = −∞
∀Y
∗
(35)
где θ – абсолютная температура, τ ≤ t – предшествующие моменты
времени, Y – произвольная точка среды.
Принцип детерминизма допускает множество эквивалентных
формулировок. Например, вместо истинного тензора напряжений T
в качестве меры напряжений можно использовать тензор напряжений с исключенным вращением T R [10] или энергетический тензор
напряжений PC [1]:
( ) = (R )
T R = RT ⋅ T ⋅ R , T R
∗
∗ T
⋅ T∗ ⋅ R ∗ ;
(36)
T
−1
−1
PC = 0,5 det ( F ) F −1 ⋅ T ⋅ ( F −1 ) , PC∗ = 0,5 det ( F∗ )( F∗ ) ⋅ T∗ ⋅ ( F∗ ) . (37)
T
1
Скаляры включены в оба определения (32), (33), так как нет веских причин
для того, чтобы отдать предпочтение какому-то одному из них.
2
То же самое касается определяющих соотношений для вектора теплового
потока и удельной внутренней энергии.
106
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
Приведённый тензор PC энергетически сопряжён с мерой деформации Коши C :
1
1
& , C = FT ⋅ F ,
T : D = PC : C
ρ
ρ0
(38)
где ρ , ρ0 – плотность в актуальной и отсчётной конфигурациях соответственно, D = 0,5 ( ∇v + ∇vT ) – тензор скоростей деформации,
∇ = ∂ ∂x – оператор градиента по отношению к актуальной конфигурации, точка сверху обозначает полную (материальную) производную по времени. На основании (34) –(37) нетрудно установить,
что если в одной системе отсчёта выполняются соотношения
τ=t
τ=t
T R (t , X ) = ℑR [x(τ , Y ), θ(τ , Y )] , PC (t , X ) = ℑC [x(τ , Y ), θ(τ , Y )],
τ = −∞
τ = −∞
∀Y
(39)
∀Y
то в другой системе отсчёта будут справедливы аналогичные по виду
соотношения
(T ) (t
R ∗ ∗
(
∗
)
τ∗ = t ∗
R
, X = ∗ℑ
)
τ = −∞
τ∗ = t ∗
[x (τ , Y ),θ (τ , Y )],
[ (
∗
∗
∗
∗
∗
∀Y ∗
) (
)]
PC∗ t ∗ , X∗ = ℑC x∗ τ , Y∗ , θ∗ τ∗ , Y∗ .
τ ∗ = −∞
∀Y
∗
(40)
Введение мер напряжений (36), (37) удобно тем, что они носят инвариантный характер:
(T )
R ∗
= Q 0 ⋅ T R ⋅ QT0 , PC∗ = Q 0 ⋅ PC ⋅ QT0 .
(41)
В общем, можно использовать и другие известные меры напряжений
(см., например, [1–3, 10]). Всякий раз будет получаться результат,
подобный (39), (40).
На практике при математическом моделировании свойств конкретного материала приходится исходить из частных случаев функционала (34), задавая его вид на основании тех или иных физических
соображений. К примеру, можно считать, что тензор напряжений
T(t , X ) является функцией некоторых параметров термомеханиче-
ского состояния Π(t , X ) , значения которых берутся в тот же момент
107
С.А. Корнеев
времени и в той же точке среды. В частности, интересуясь упругими
свойствами материала, можно взять за основу функцию (1). Если необходимо учесть влияние скорости деформации, то можно исходить
из функциональной зависимости
T = Φ(x , x& , F , F& ) .
(42)
Если требуется охватить эффект релаксации напряжений, то можно
взять соотношение
& = Φ(F , F& , T ).
T
(43)
В качестве характеристики деформации в исходных соотношениях
типа (1), (42), (43) вместо градиента деформации F можно брать
любую другую известную меру деформации или тензор деформации,
например, меру деформации Генки или тензор конечной деформации (см. [1–3, 10]).
Усовершенствованная методика применения принципа
объективности
Для большей наглядности проиллюстрируем методику получения определяющих соотношений (с точностью до скалярных коэффициентов) на конкретных примерах. Пусть в одной из систем отсчёта (без звёздочки) имеет место соотношение (42). Тогда в любой
другой системе отсчёта (со звёздочкой)
T∗ = Φ x∗ , x& ∗ , F∗ , F& ∗ .
(44)
(
)
Примем, что Q 0 = I , т.е. в начальный момент времени соответствующие орты базисных декартовых систем координат обеих систем
отсчёта коллинеарны. Осуществим переход от исходной системы
отсчёта к сопутствующей системе отсчёта, относительно которой
рассматриваемая точка среды неподвижна, а её бесконечно малая
окрестность деформируется без квазитвёрдого вращения: R ∗ (t ) ≡ I .
Совместив полюс O ∗ с данной точкой среды, будем иметь
x O∗ (t ) = x(t ) . Принимая во внимание (29), находим Q(t ) = R T (t ) .
С помощью формул (3), (5), (25), (28), (42) получим
T∗ = Q ⋅ T ⋅ QT = R T ⋅ Φ(x , x& , F , F& )⋅ R , x∗ = 0 , x& ∗ = 0 ,
&.
F∗ = Q ⋅ R ⋅ U = U , F& ∗ = U
108
(45)
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
Подставляя (45) в (44), находим
&)
RT ⋅ Φ(x , x& , F , F& )⋅ R = Φ(0 ,0 , U , U
или со ссылкой на (36), (42)
& ).
T R = Φ (U , U
(46)
Вновь обратимся к принципу объективности поведения материалов, осуществив на этот раз переход от одной инерциальной системы отсчёта к любой другой инерциальной системе отсчёта. Очевидно, что во второй формуле перехода (25) данному случаю отвечает произвольный независящий от времени ортогональный тензор
Q = Q 0 . Тогда на основании (30), (40), (41) удаётся уточнить свойства функциональной зависимости (46):
& )⋅ Q T = Φ Q ⋅ U ⋅ Q T , Q ⋅ U
& ⋅ QT ,
Q 0 ⋅ Φ (U , U
0
0
0
0
0
(
)
(47)
ибо, с одной стороны,
(T ) = Q
R ∗
0
& )⋅ QT ,
⋅ T R ⋅ QT0 = Q0 ⋅ Φ(U , U
0
и, с другой стороны,
(T )
R ∗
(
)
(
)
& ∗ = Φ Q ⋅ U ⋅ QT , Q ⋅ U
& ⋅ QT .
= Φ U∗ , U
0
0
0
0
Равенство (47) означает, что зависимость (46) является изотропной
симметричной тензорной функцией двух симметричных тензорных
аргументов. В этом дополнительном результате и состоит усовершенствование техники традиционного применения принципа объективности. Благодаря данному результату и теореме об изотропных
тензорных функциях (см. приложение) удаётся установить общий
вид соотношения (46) с точностью до скалярных коэффициентов:
& ) = χ I +χ U +χ U2 +χ U
&
&2
& s
Φ( U, U
0
1
2
3 +χ4U +χ5 ( U ⋅ U) +
& )s +χ ( U ⋅ U
& 2 )s +χ ( U2 ⋅ U
& 2 )s
+χ6 ( U ⋅ U
7
8
.
(48)
2
Здесь A s = 0,5 ( A + AT ) – симметричная часть тензора A . Скалярные коэффициенты χ k ( k =0, 1, …, 8) в общем случае являются
функциями инвариантов (см. приложение)
109
С.А. Корнеев
(
)
& , trU
& 2 , trU
& 3 , tr U ⋅ U
& ,
trU , trU 2 , trU 3 , trU
(
) (
) (
)
& , tr U ⋅ U
& 2 , tr U 2 ⋅ U
&2 .
tr U 2 ⋅ U
(49)
Так как по формуле полярного разложения (5)
V = R ⋅ U ⋅ RT , U = RT ⋅ V ⋅ R ,
на основании (36), (46), (48) окончательно получаем
& )⋅ R T = χ I + χ V + χ V 2 +
T = R ⋅ Φ (U , U
0
2
1
s
2
s
∗
∗
∗
∗
+χ3 V + χ 4 V + χ5 V ⋅ V + χ 6 V 2 ⋅ V +
s
2
∗ 2
∗
+χ 7 V ⋅ V + χ8 V 2 ⋅ V
(50)
s
.
(51)
Здесь
∗
& ⋅ RT = V
& − Ω⋅V + V ⋅Ω
V ≡ R⋅U
(52)
– коротационная производная тензора V (объективный тензор) [3],
& ⋅ RT
Ω=R
(53)
– тензор спина, характеризующий относительную угловую скорость
вращения сопутствующей и исходной системы отсчёта. В формуле
(51) по списку (49)
2
3
2
2
∗
∗
∗
∗ ∗
∗
∗
χk = χk trV, trV2 , trV3 , tr V, tr V , tr V , tr V ⋅ V , tr V2 ⋅ V , tr V ⋅ V , tr V2 ⋅ V .
Замечание. Если в определяющем соотношении (51) положить χ3 = ... = χ8 = 0 , получится соотношение (12), которое имеет
место для изотропных материалов. Однако в этом совпадении нет
противоречия с исходной зависимостью (1), справедливой для произвольной анизотропной упругой среды. Просто в (1), как и в (42),
указан полный список аргументов, характерный для изотропных тел,
у которых список параметров анизотропии в неискажённой конфигурации пуст. Чтобы получить определяющие соотношения для (начально) анизотропных упругих сред, перед применением теоремы об
изотропных функциях надо в числе аргументов функции (1) явно
указать те параметры, которые характеризуют анизотропию свойств
материала в неискажённой конфигурации. К примеру, чтобы установить определяющее соотношение для трансверсально изотропных
110
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
упругих тел, свойства которых в неискажённой конфигурации остаются неизменными при повороте на произвольный угол относительно некоторой оси с направляющим ортом n , в число аргументов
функции (1) следует ввести орт n , который является инвариантным
вектором: n∗ = Q 0 ⋅ n . Действительно, параметры начальной (в момент времени t = t0 ) анизотропии должны сохранять постоянное
значение, а в разложении по базису e k (см. рис. 2) орт n должен
иметь одинаковые компоненты для обоих наблюдателей. Отсюда в соответствии с формулой (23) имеем
(
n∗ = nk∗ e k t0∗ , M
)
@
∗
(
= nk e k t0∗ , M
)
= nk Q(t0 ) ⋅ e k (t0 , M ) @ = Q(t0 ) ⋅ n .
@∗
Тогда, исходя из зависимости
T = Φ(F ,n ) ,
вместо (46) получится выражение
T R = Φ(U , n ) ,
а вместо (47) – выражение
(
)
Q 0 ⋅ Φ(U , n ) ⋅ QT0 = Φ Q 0 ⋅ U ⋅ QT0 , Q 0 ⋅ n .
Последующее применение теоремы об изотропных симметричных тензорных функциях даст следующее соотношение (см. приложение):
[
]
Φ(U,n) = χ0I + χ1U + χ2U2 + χ3n ⊗ n + χ4 [U ⋅ (n ⊗ n)] + χ5 U2 ⋅ (n ⊗ n) . (54)
s
s
Здесь ⊗ – знак диадного умножения. Скалярные коэффициенты χ k
( k =0, 1, …, 5) в общем случае являются функциями инвариантов
(см. приложение)
trU , trU 2 , tr (n ⊗ n ) = n 2 = 1 , tr[U ⋅ (n ⊗ n )] = n ⋅ U ⋅ n ,
[
]
tr U 2 ⋅ (n ⊗ n ) = n ⋅ U 2 ⋅ n .
В линейном приближении (по тензору U ) для трансверсально изотропного упругого материала из (54) получается выражение
Φ( U, n) = ( a1 + a2trU + a3n ⋅ U ⋅ n) I + a4U +
+ ( a5 + a6trU + a7n ⋅ U ⋅ n) n ⊗n + a8 U ⋅ ( n ⊗n)
s
,
111
С.А. Корнеев
которое в силу равенств
a1 + 3a2 + a3 + a4 = 0 , a5 + 3a6 + a7 + a8 = 0
(55)
содержит шесть независимых коэффициентов. Равенства (55) вытекают из требования
Φ(U = I ,n) = (a1 + 3a2 + a3 + a4 )I + (a5 + 3a6 + a7 + a8 )n ⊗ n = 0 ,
означающего, что в отсчётной конфигурации, когда U = I , материал
находится в ненагруженном состоянии: T = 0 . Следует подчеркнуть,
что у трансверсально изотропного гиперупругого материала имеется
только пять независимых коэффициентов (в линейном приближении)
[11, 12]. Это отличие между упругими и гиперупругими телами связано с дополнительным требованием: у гиперупругого тела (материала)
существует упругий потенциал [1, 2].
В качестве второго примера, иллюстрирующего дополнительные возможности усовершенствованной техники применения принципа объективности, рассмотрим определяющее соотношение (43),
которое принимается за исходное в одной из систем отсчёта (без звёздочки). По принципу объективности в любой другой системе отсчёта
(со звёздочкой) будет выполняться аналогичное соотношение
(
)
& ∗ = Φ F∗ , F& ∗ , T∗ .
T
(56)
На первом шаге примем Q 0 = I и осуществим переход от исходной системы отсчёта к сопутствующей системе отсчёта, для которой R ∗ (t ) ≡ I и, соответственно, Q(t ) = R T (t ) . Отсюда с помощью
формул (3), (5), (28) получаем
&∗ = T
& R , F∗ = Q ⋅ R ⋅ U = U , F& ∗ = U
&.
T∗ = Q ⋅ T ⋅ Q T = R T ⋅ T ⋅ R = T R , T
Подставив эти значения в (56), будем иметь
(
)
& R = Φ U ,U
& ,TR .
T
(57)
На втором шаге осуществим переход от одной инерциальной
системы отсчёта к другой инерциальной системе отсчёта (в этом
случае Q = Q 0 ). Благодаря этому шагу на основании (30), (40), (41)
удаётся уточнить свойства правой части (57):
(
)
(
)
& , T R ⋅ QT = Φ Q ⋅ U ⋅ QT , Q ⋅ U
& ⋅ QT , Q ⋅ T R ⋅ QT ,
Q0 ⋅ Φ U , U
0
0
0
0
0
0
0
112
(58)
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
ибо, с одной стороны,
(T& ) = Q
R ∗
0
(
)
& R ⋅ QT = Q ⋅ Φ U , U
& , T R ⋅ QT ,
⋅T
0
0
0
и, с другой стороны,
(T& )
R ∗
( )
(
)
& ∗ , T R ∗ = Φ Q ⋅ U ⋅ QT , Q ⋅ U
& ⋅ QT , Q ⋅ T R ⋅ QT .
= Φ U∗ , U
0
0
0
0
0
0
Равенство (58) позволяет применить теорему об изотропных симметричных тензорных функциях трёх симметричных тензорных аргументов (см. приложение) и получить общий вид правой части (57)
с точностью до скалярных коэффициентов:
(
)
( )
& ) + χ (U ⋅ U
& ) + χ (U ⋅ U
& ) + χ (U ⋅ U
& ) +
+ χ (U ⋅ U
(U ⋅ T ) + χ (U ⋅ T ) + χ U ⋅ (T ) + χ U ⋅ (T )
R
R 2
& , TR = χ I + χ U + χ U2 + χ U
&
&2
Φ U, U
+
0
1
2
3 + χ4U + χ5T + χ6 T
s
7
+ χ11
(
s
2
2 s
8
R s
s
R 2
12
)
10
R s
2
14
(
s
R 2
2
13
( )
2 s
2
9
)
( )
s
+
s
& s + χ T R 2 ⋅ U
& + χ T R ⋅ U
& 2 s + χ T R 2 ⋅ U
& 2 . (59)
+ χ15 T R ⋅ U
16
17
18
Скалярные коэффициенты χ k ( k =0, 1, …, 18) в общем случае явля& , TR
ются функциями соответствующих инвариантов тензоров U , U
и их комбинаций (см. приложение).
Принимая во внимание (50), (52), (53), из (57), (59) получаем
(
∗
)
& − Ω ⋅ T + T ⋅ Ω = R ⋅ Φ U ,U
& , T R ⋅ RT =
T≡T
2
∗
∗
= χ 0I + χ1V + χ 2 V 2 + χ3 V + χ 4 V + χ5T + χ 6T 2 +
s
s
s
s
2
∗ 2
∗
∗
2 ∗
2
+ χ 7 V ⋅ V + χ8 V ⋅ V + χ9 V ⋅ V
+ χ10 V ⋅ V
+
(
)
(
)
(
)
+ χ11 (V ⋅ T ) + χ12 V 2 ⋅ T + χ13 V ⋅ T 2 + χ14 V 2 ⋅ T 2 +
s
s
s
s
s
s
s
s
2
∗ 2
∗
∗
2 ∗
2
+ χ15 T ⋅ V + χ16 T ⋅ V + χ17 T ⋅ V
+ χ18 T ⋅ V . (60)
113
С.А. Корнеев
Как видим, в соотношение (60) входит однотипная коротационная
производная тензоров T , V , что соответствует положению, выдвинутому в [3].
Замечание. В конце первого шага, получив соотношение (57),
можно перейти от инвариантной меры напряжений T R и инвариантной меры деформации U к другой инвариантной мере напряжений
и другой инвариантной мере деформации, например, к энергетически сопряжённым тензорам PC и C соответственно. Тогда на основании формул (5), (36) –(38), (41) будем иметь
T R = RT ⋅ T ⋅ R = U ⋅ U −1 ⋅ RT ⋅ T ⋅ R ⋅ U −1 ⋅ U =
U ⋅ PC ⋅ U
, C = U2 .
0,5 detU
Благодаря последним равенствам соотношение (57) можно представить в виде
(
)
& ,P .
P& C = ΦC C , C
C
(61)
Осуществив после этого второй шаг, вместо (58) получим
(
(
)
)
& , P ⋅ QT = Φ Q ⋅ C ⋅ QT , Q ⋅ C
& ⋅ QT , Q ⋅ P ⋅ QT .
Q 0 ⋅ ΦC C , C
C
0
C
0
0
0
0
0
C
0
Отсюда по теореме об изотропных тензорных функциях (см. приложение)
(
)
2
& , P = λ I + λ C + λ C2 + λ C
&
&2
ΦC C,C
C
0
1
2
3 + λ4C + λ5PC + λ6PC +
( ) ( ) (
)
+ λ (C ⋅ P ) + λ (C ⋅ P ) + λ (C ⋅ P ) + λ (C ⋅ P ) +
& ) + λ (P ⋅ C
& ) + λ (P ⋅ C
& ) + λ (P ⋅ C
& ) .
+ λ (P ⋅ C
(
)s
s
s
s
& + λ C2 ⋅ C
& + λ C⋅C
& 2 + λ C2 ⋅ C
&2 +
+ λ7 C ⋅ C
8
9
10
s
11
C
s
15
C
s
2
12
16
C
2
C
13
s
2 s
C
2 s
17
C
2 s
C
2
14
18
2 s
2
C
(62)
Принимая во внимание (37) и учитывая, что
(
)
dF −1
d
= −F −1 ⋅ ∇v , detF = detF tr F& ⋅ F −1 = detF ∇ ⋅ v ,
∇v = F& ⋅ F −1 ,
dt
dt
на основании (61), (62) имеем
114
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
T =
Tr
=
(
)
& , P ⋅ FT
F ⋅ ΦC C, C
C
0,5detF
=
∗
∗ 2
2
2
3
12
12
12
12
λ
B
+λ
B
+λ
B
+λ
B
⋅
B
⋅
B
+λ
B
⋅
B
0
⋅B +
1
2
3
4
det B
s
s
∗ s
∗ 2
∗
+λ 7 B ⋅ B ⋅ B ⋅ B1 2 + λ8B1 2 ⋅ B 2 ⋅ B ⋅ B1 2 + λ 9 B1 2 ⋅ B ⋅ B ⋅ B1 2 +
12
s
2 ∗ 2
s
s
+λ10 B ⋅ B ⋅ B ⋅ B1 2 + + λ5T + λ11 ( B ⋅ T ) + λ12 ( B 2 ⋅ T ) +
12
s
2
s
∗
∗
det B
−1
+ λ15 T ⋅ B −1 2 ⋅ B⋅ B1 2 + λ17 T ⋅ B −1 2 ⋅ B⋅ B1 2 +
λ6 T ⋅ B ⋅ T +
2
s
∗
+λ13 ( B ⋅ T⋅ B ⋅ T) + λ14 ( B ⋅ T⋅ B ⋅ T) + λ16 T2 ⋅ B−1 2 ⋅ B⋅ B1 2 +
−1
s
2
s
2 −1 2 ∗ 1 2 2
+λ18 T ⋅ B ⋅ B⋅ B
−1
s
.
(63)
Здесь
& − ∇v ⋅ T − T ⋅ ∇v T + T∇ ⋅ v
TTr ≡ T
– производная Трусделла тензора T (объективный тензор) [3, 10],
B ≡ F ⋅ FT = V 2
– мера деформации Грина. Несмотря на существенные внешние отличия, определяющие соотношения (60) и (63) эквивалентны между
собой, каждое из них можно получить из другого путём тождественных преобразований.
115
С.А. Корнеев
Заключение
В формулах перехода (29) –(31), (41), имеющих место при замене
системы отсчёта, следует учитывать тензор Q 0 , характеризующий вза-
имный поворот систем отсчёта в начальный момент времени. Благодаря этому удаётся достаточно просто доказывать изотропность соответствующих функциональных зависимостей и, используя известные
теоремы об изотропных функциях, находить общий вид векторных
и тензорных определяющих соотношений с точностью до скалярных
коэффициентов. Это небольшое, но принципиальное изменение традиционной техники применения принципа объективности является
весомым дополнением к термодинамическим методам получения определяющих соотношений, особенно в тех случаях, когда возникают
трудности с выбором диссипативного неравенства, описывающего
необратимые изменения материала (см., например, [13]).
Приложение [6]
Обозначения. Здесь A , v , W – симметричный тензор, вектор
и кососимметричный тензор соответственно, ⊗ – знак диадного
произведения, T s = 0,5 ( T + TT ) – симметричная часть тензора T ,
Tc = 0,5 ( T − TT ) – кососимметричная часть тензора T .
Определение. Скалярно-значная функция f ( A1 ,..., A a , v1 ,.., v b ,
W1, …, Wc) называется изотропной функцией, если для всех ортогональных тензоров Q выполняется условие
f ( Q⋅ A1 ⋅ QT ,..., Q⋅ Aa ⋅ QT , Q⋅ v1,.., Q⋅ vb , Q⋅ W1 ⋅ QT ,..., Q⋅ Wc ⋅ QT ) =
= f ( A1,..., Aa , v1,.., vb , W1,..., Wc )
.
Теорема общего представления скалярнозначной изотропной
функции. Для трёхмерного пространства полное и несократимое
представление скалярной изотропной функции f ( A1 ,..., A a , v1 ,.., v b ,
W1, …, Wc) даётся в виде
(
)
f (A1 ,..., A a , v1 ,.., v b , W1 ,..., Wc ) = F lA1 ,...,A a , v1 ,.., v b ,W1 ,...,Wc ,
где lA1 ,...,A a ,v1 ,..,vb ,W1 ,...,Wc – все инварианты, составленные из одного,
двух, трёх, четырёх аргументов (A1 ,..., A a , v1 ,.., v b , W1 ,..., Wc ) в соответствии с табл. 1–4.
116
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
Таблица 1
Первая группа инвариантов для каждого аргумента в отдельности
Переменная
Инварианты
A
v
W
trA , trA 2 , trA 3
v2
trW 2
Таблица 2
Вторая группа инвариантов для пар аргументов
Переменные
A1 , A 2
A, v
A, W
v1 , v 2
v, W
W1 , W2
tr (A1 ⋅ A 2 ) , tr
Инварианты
(
A12
) (
) (
⋅ A 2 , tr A1 ⋅ A 22 , tr A12 ⋅ A 22
v⋅A⋅ v , v⋅A ⋅v
tr A ⋅ W , tr A 2 ⋅ W 2 , tr A 2 ⋅ W 2 ⋅ A ⋅ W
v1 ⋅ v 2
(
2
2
) (
) (
)
)
v ⋅ W2 ⋅ v
tr (W1 ⋅ W2 )
Таблица 3
Третья группа инвариантов для троек аргументов
Переменные
A1 , A 2 , A 3
A1 , A 2 , v
A , v1 , v 2
A , W1 , W2
A1 , A 2 , W
Инварианты
tr (A1 ⋅ A 2 ⋅ A 3 )
(A1 ⋅ v )⋅ (A 2 ⋅ v )
v1 ⋅ A ⋅ v 2
(
) (
)
tr(A ⋅ A ⋅ W) , tr(A ⋅ A ⋅ W) , tr(A ⋅ A ⋅ W),
tr(A ⋅ W ⋅ A ⋅ W)
tr (A ⋅ W1 ⋅ W2 ) , tr A ⋅ W12 ⋅ W2 , tr A ⋅ W1 ⋅ W22
1
2
1
2
1
2
2
1
2
W1 , W2 , W3
tr (W1 ⋅ W2 ⋅ W3 ) ,
v1 , v 2 , W
v1 ⋅ W ⋅ v 2 , v1 ⋅ W 2 ⋅ v 2
v , W1 , W2
A, v, W
2
2
(W1 ⋅ v )⋅ (W2 ⋅ v ) , (W12 ⋅ v )⋅ (W2 ⋅ v ) , (W1 ⋅ v ) ⋅ (W22 ⋅ v )
(A ⋅ v )⋅ (W ⋅ v ) , (A 2 ⋅ v )⋅ (W ⋅ v ) , (A ⋅ W ⋅ v )⋅ (W 2 ⋅ v )
117
С.А. Корнеев
Таблица 4
Четвёртая группа инвариантов для четвёрок аргументов
Переменные
A1 , A 2 , v1 , v 2
A , v1 , v 2 , W
Инварианты
A 2 ⋅ v 2 , A1 ⋅ v 2
(A1 ⋅ v1 )⋅ (
) (
)⋅ (A 2 ⋅ v1 )
(A ⋅ v1 )⋅ (W ⋅ v 2 ) , (A ⋅ v 2 )⋅ (W ⋅ v1 )
Определение. Векторно-значная функция f (A1, …, Aa, v1, …, vb,
W1, …, Wc), симметричная тензорно-значная функция H(A1, …, Aa,
v1, …, vb, W1, …, Wc) и кососимметричная тензорно-значная функция Z(A1, …, Aa, v1, …, vb, W1, …, Wc) называются изотропными
функциями, если для всех ортогональных тензоров Q они удовлетворяют следующим условиям соответственно:
f ( Q⋅ A1 ⋅ QT ,..., Q⋅ Aa ⋅ QT , Q⋅ v1,.., Q⋅ vb , Q⋅ W1 ⋅ QT ,..., Q⋅ Wc ⋅ QT ) =
= Q⋅ f ( A1,..., Aa , v1,.., vb , W1,..., Wc ) ,
H( Q⋅ A1 ⋅QT ,...,Q⋅ Aa ⋅QT , Q⋅ v1,.., Q⋅ vb, Q⋅ W1 ⋅QT ,...,Q⋅ Wc ⋅QT ) =
= Q⋅ H( A1,..., Aa , v1,.., vb , W1,..., Wc ) ⋅QT ,
Z( Q⋅ A1 ⋅ QT ,..., Q⋅ Aa ⋅ QT , Q⋅ v1,.., Q⋅ vb , Q⋅ W1 ⋅ QT ,..., Q⋅ Wc ⋅ QT ) =
= Q⋅ Z( A1,..., Aa , v1,.., vb , W1,..., Wc ) ⋅ QT .
Теорема общего представления векторно-значной изотропной
функции. Для трёхмерного пространства полное и несократимое
представление векторной изотропной функции f (A1, …, Aa, v1, …, vb,
W1, …, Wc) даётся в виде
f ( A1,..., Aa , v1,.., vb , W1,..., Wc ) =
g
= ∑ f i ( A1,..., Aa , v1,.., vb , W1,..., Wc ) fi ( A1,..., Aa , v1,.., vb , W1,..., Wc ) ,
i =1
где f 1 , …, f
g
{
}
– скалярно-значные изотропные функции, f1 ,...,f g –
базисные векторы, составленные из одного, двух, трёх аргументов
(A1 ,..., A a , v1 ,.., v b , W1 ,..., Wc ) в соответствии с табл. 5–7.
118
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
Таблица 5
Первая группа базисных векторов для каждого аргумента в отдельности
Переменная
Базисные векторы
v
v
Таблица 6
Вторая группа базисных векторов для пар аргументов
Переменные
A, v
Базисные векторы
A ⋅ v , A2 ⋅ v
v, W
W ⋅ v , W2 ⋅ v
Таблица 7
Третья группа базисных векторов для троек аргументов
Переменные
A1 , A 2 , v
A, v, W
v , W1 , W2
Базисные векторы
A1 ⋅ A 2 ⋅ v , A 2 ⋅ A1 ⋅ v
A⋅W⋅v , W⋅A⋅v
W1 ⋅ W2 ⋅ v , W2 ⋅ W1 ⋅ v
Теорема общего представления симметричной тензорно-значной изотропной функции. Для трёхмерного пространства полное
и несократимое представление симметричной тензорной изотропной
функции H(A1 ,...,Aa , v1 ,..,vb , W1 ,...,Wc ) даётся в виде
H( A1,..., Aa , v1,.., vb , W1,..., Wc ) =
g
= ∑H i ( A1,..., Aa , v1,.., vb , W1,..., Wc ) Hi ( A1,..., Aa , v1,.., vb , W1,..., Wc ) ,
i =1
{
}
где H 1 ,…, H g – скалярно-значные изотропные функции, H1 ,..., H g –
симметричные базисные тензоры, составленные из одного, двух, трёх
аргументов (A1 ,..., A a , v1 ,.., v b , W1 ,..., Wc ) в соответствии с табл. 8–10.
Таблица 8
Первая группа базисных тензоров для каждого аргумента в отдельности
Переменная
Симметричные базисные тензоры
I
A
v
W
A , A2
v⊗v
W2
119
С.А. Корнеев
Таблица 9
Вторая группа базисных тензоров для пар аргументов
Переменные
A1 , A 2
A, v
A, W
v1 , v 2
v, W
W1 , W2
Симметричные базисные тензоры
(A1 ⋅ A 2 )s , (A12 ⋅ A 2 ) , (A1 ⋅ A 22 ) , (A12 ⋅ A 22 )
[v ⊗ (A ⋅ v )]s , [v ⊗ (A 2 ⋅ v )]s
s
s
s
(A ⋅ W )s , W ⋅ A ⋅ W , (A 2 ⋅ W ) , W ⋅ A 2 ⋅ W , (W ⋅ A ⋅ W 2 )
(v1 ⊗ v 2 )s
s
(W ⋅ v ) ⊗ (W ⋅ v ) , [v ⊗ (W ⋅ v )]s , [(W ⋅ v ) ⊗ (W 2 ⋅ v )]
s
s
(W1 ⋅ W2 )s , (W1 ⋅ W22 ) , (W12 ⋅ W2 )
s
s
Таблица 10
Третья группа базисных тензоров для троек аргументов
Переменные
A , v1 , v 2
v1 , v 2 , W
Симметричные базисные тензоры
[v1 ⊗ (A ⋅ v 2 )]s , [v 2 ⊗ (A ⋅ v1 )]s
[v1 ⊗ (W ⋅ v 2 )]s , [v 2 ⊗ (W ⋅ v1 )]s
Теорема общего представления кососимметричной тензорнозначной изотропной функции. Для трёхмерного пространства полное
и несократимое представление кососимметричной тензорной изотропной функции Z(A1 ,...,Aa , v1 ,..,vb , W1 ,...,Wc ) даётся в виде
Z( A1,..., Aa , v1,.., vb , W1,..., Wc ) =
g
= ∑Zi ( A1,..., Aa , v1,.., vb , W1,..., Wc ) Zi ( A1,..., Aa , v1,.., vb , W1,..., Wc ) ,
i=1
{
}
где Z 1 , …, Z g – скалярно-значные изотропные функции, Z1 ,..., Z g –
кососимметричные базисные тензоры, составленные из одного,
двух, трёх аргументов (A1 ,..., A a , v1 ,.., v b , W1 ,..., Wc ) в соответствии
с табл. 11–13.
Таблица 11
Первая группа базисных тензоров для каждого аргумента в отдельности
120
Переменная
Кососимметричные базисные тензоры
W
W
Принцип объективности и техника его применения при построении
определяющих соотношений с точностью до скалярных коэффициентов
Таблица 12
Вторая группа базисных тензоров для пар аргументов
Переменные
Кососимметричные базисные тензоры
(A1 ⋅ A 2 )c , (A12 ⋅ A 2 ) , (A1 ⋅ A 22 )
c
A1 , A 2
A, v
A, W
v1 , v 2
v, W
W1 , W2
c
(
(
),
2 c
, A1 ⋅ A 2 ⋅ A1
)
[v ⊗ (A ⋅ v )] , [v ⊗ (A ⋅ v )] , [(A ⋅ v ) ⊗ (A ⋅ v )] ,
(A ⋅ W ) , (A ⋅ W )
c
c
A 2 ⋅ A1 ⋅ A 22
c
2
c
2
c
2 c
(v1 ⊗ v 2 )c
[v ⊗ (W ⋅ v )]c , [v ⊗ (W 2 ⋅ v )]c
(W1 ⋅ W2 )c
Таблица 13
Третья группа базисных тензоров для троек аргументов
Переменные
A1 , A 2 , A 3
A1 , A 2 , v
A , v1 , v 2
v1 , v 2 , W
Кососимметричные базисные тензоры
(A1 ⋅ A 2 ⋅ A3 )c , (A 2 ⋅ A3 ⋅ A1 )c , (A3 ⋅ A1 ⋅ A 2 )c
[(A1 ⋅ v ) ⊗ (A 2 ⋅ v )]c
[v1 ⊗ (A ⋅ v 2 )]c , [v 2 ⊗ (A ⋅ v1 )]c
[v1 ⊗ (W ⋅ v 2 )]c , [v 2 ⊗ (W ⋅ v1 )]c
Библиографический список
1. Лурье А.И. Нелинейная теория упругости / А.И. Лурье. – М.:
Наука, 1980. – 512 с.
2. Трусделл К. Первоначальный курс рациональной механики
сплошных сред / К. Трусделл. – М.: Мир, 1975. – 592 с.
3. Поздеев А.А. Большие упругопластические деформации /
А.А. Поздеев, П.В. Трусов, Ю.И. Няшин. – М.: Наука, 1986. – 232 с.
4. Астарита Дж. Основы гидромеханики неньютоновских жидкостей / Дж. Астарита, Дж. Марруччи. – М.: Мир, 1978. – 309 с.
5. Можен Ж. Механика электромагнитных сплошных сред /
Ж. Можен. – М.: Мир, 1991. – 560 с.
121
С.А. Корнеев
6. Wang C.-C. A New Representation Theorem for Isotropic Functions / C.-C. Wang // Arch. Rat. Mech. Anal. – 1970. – Vol. 36. – № 3. –
P. 198–223.
7. Айзерман М.А. Классическая механика / М.А. Айзерман. –
М.: Наука, 1980. – 368 с.
8. Медведев Б.В. Начала теоретической физики / Б.В. Медведев. – М.: Наука, 1977. – 496 с.
9. Noll W. Euclidean geometry and Minkowskian chronometry /
W. Noll // Amer. Math. Monthly. – 1964. – № 71. – P. 129–144.
10. Коробейников С.Н. Нелинейное деформирование твёрдых
тел / С.Н. Коробейников. – Новосибирск: Изд-во СО РАН, 2000. –
262 с.
11. Новацкий В. Теория упругости / В. Новацкий. – М.: Мир,
1975. – 872 с.
12. Победря Б.Е. Численные методы в теории упругости и пластичности / Б.Е. Победря. – М.: Изд-во МГУ, 1995. – 366 с.
13. Корнеев С.А. Термодинамические методы получения определяющих соотношений / С.А. Корнеев // Математ. моделир. систем
и процессов. – 2005. – № 13. – С. 61–79.
Получено 05.2007
122