")
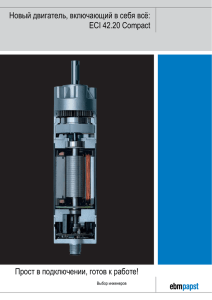
Современные системы автоматизированного электропривода mag@nvsu.ru Современные системы автоматизированного электропривода Структура дисциплины Виды учебной работы 1 семестр Лабораторные работы V V Самостоятельная работа V Лекции Курсовой проект нет Промежуточная аттестация экзамен mag@nvsu.ru 2 Литература Браславский, И. Я. Энергосберегающий асинхронный электропривод: учеб. пособие для студентов вузов, обучающихся по специальности 180400 "Электропривод и автоматика пром. установок и технол. комплексов" направления 654500 "Электротехника, электромеханика и электротехнологии"/ И. Я. Браславский, З. Ш. Ишматов, В. Н. Поляков ; под ред. И. Я. Браславского. М.: Академия, 2004. - 248, [1] с Москаленко, В. В. Электрический привод: учеб. для студентов вузов, обучающихся по направлению подготовки "Электротехника, электромеханика и электротехнологии"/ В. В. Москаленко. - М.: Академия, 2007. - 360, [1] с Розанов, Ю. К. Силовая электроника: учеб. для студентов вузов, обучающихся по направлению подготовки "Электротехника, электромеханика и электротехнологии"/ Ю. К. Розанов, М. В. Рябчицкий, А. А. Кваснюк. - 2-е изд., стер.. - М.: МЭИ, 2009. - 631, [1] с. mag@nvsu.ru 3 Современные системы автоматизированного электропривода Электропривод - электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенную для приведения в движение исполнительных органов производственной машины и управления этим движением. Автоматизированный электропривод регулируемый электропривод с автоматическим регулированием параметров. mag@nvsu.ru 4 Современные системы автоматизированного электропривода • • • • • • • • В силовом канале электрическая энергия ИЭЭ Wиээ поступает на ПрУ. Часть поступившей энергии рассеивается в ПрУ, составляя соответствующие потери энергии WПрУ. Оставшаяся часть электрической энергии WПрУ = WИЭЭ - WПрУ передается ЭТУ. Часть поступившей энергии рассеивается в нем, составляя его потери WЭТУ. Остальная часть энергии преобразовывается из электрической в технологическую, так что в результате оставшаяся часть энергии WЭТУ = WПрУ - WЭТУ поступает на ПеУ. Часть поступившей энергии рассеивается в ПеУ, составляя его потери WПеУ. Остальная часть технологической энергии WПеУ = WЭТУ - WПеУ передается ТМ. Технологическая энергия, поступившая в ТМ, расходуется на полезный эффект, заданный технологическим процессом. WИЭЭ ИЭЭ WПрУ ПрУ WЭТУ ЭТУ W ПеУ ПеУ ТМ ИУУ ЭТК mag@nvsu.ru 5 Современные системы автоматизированного электропривода • • • • • • ИЭЭ - первичный источник электрической энергии - обычно промышленная или автономная сеть постоянного или переменного тока. ПрУ - преобразовательное устройство - обычно полупроводниковое статическое, электромагнитное или электромеханическое электротехнические изделия, обеспечивающее согласование имеющихся параметров электрической энергии ИЭЭ и параметров необходимых для ЭТУ. ЭТУ - электротехнологическое устройство - обычно электромеханические преобразователи в электроприводе, электротепловые преобразователи в электротермии, электросветовые преобразователи в осветительных установках - осуществляющее главный процесс преобразования электрической энергии в другие виды энергии. ПеУ - передаточное устройство - обычно механические передаточные устройства в электроприводе, теплопроводы, теплообменники в электротермии, световоды, рефлекторы, отражатели в устройствах освещения, осуществляющие согласование параметров полученной с ЭТУ технологической энергии с параметрами, необходимыми для реализации конкретного технологического процесса. ТМ - технологическая машина - обычно исполнительный орган рабочей машины в электроприводе, количество теплоты, воздействующее на нагреваемый объект в установках электротермии, световой поток в осветительных установках. ИУУ - информационно-управляющее устройство - обычно автоматические и автоматизированные системы управления, в последнее время включающие в себя микропроцессорную, компьютерную технику. WИЭЭ ИЭЭ WПрУ ПрУ WЭТУ ЭТУ W ПеУ ПеУ ТМ ИУУ ЭТК mag@nvsu.ru 6 Значимость асинхронных приводов переменного тока Потребность в регулировании скорости двигателей, чтобы оптимально управлять технологическим процессом существовала всегда. Механический способ регулирования (с помощью механического вариатора) Приводы постоянного тока mag@nvsu.ru Асинхронные приводы 7 Значимость асинхронных приводов переменного тока • Причины роста популярности частотного асинхронного электропривода: • Асинхронные машины нетребовательны к техобслуживанию • Возможно эксплуатирование во взрывоопасной зоне • Высокий коэффициент мощность/масса для асинхронного двигателя • Возможность управления при максимальной скорости • Низкая стоимость асинхронных двигателей • Постоянное улучшение технологии преобразователя с одновременным понижением цены mag@nvsu.ru 8 Значимость асинхронных приводов переменного тока Основные сферы применения : • Насосы, вентиляторы, компрессоры • Конвейер и транспортное оборудование • Текстильные машины • Механические станки и деревообрабатывающие машины • Упаковочные машины • Роботы и транспортные системы • Оборудование для белильной и бумажной промышленности Большинство приводов находятся в диапазоне до 4 кВт mag@nvsu.ru 9 Современные системы автоматизированного электропривода Устройство и режим работы mag@nvsu.ru Устройство и режим работы Статор АД состоит из пластинчатого сердечника. Трехфазная обмотка состоит из трех намотанных проводов U,V и W, которые уложены в пазах с внутренней стороны статора. Концы обмоток выходят в клемную колодку и могут быть соединены в звезду или треугольник. Ротор состоит из пластинчатого сердечника, в которой встроенно много стержней. Их концы соединены кольцевыми обоимами (беличье колесо) mag@nvsu.ru 11 Устройство и режим работы Когда на двигатель подается трехфазное напряжение появляется круговое вращающееся поле вызванное геометрическим расположением статорной обмотки. Вращающееся магнитное поле статора наводит э.д.с. в обмотке ротора. Э.д.с. вызывает ток ротора I2, который вместе с магнитным потоком статора Ф создает момент MI. 𝑀𝐼 = Ф ∙ 𝐼2 Пока магнитное поле статора Ф вращается с угловой скоростью ω, ротор должен стремиться к этой скорости. Это применимо когда двигатель работает на холостом ходу, т.е. без нагрузки. Затем, двигатель достигает синхронную скорость. 60 ∙ 𝑓1 𝑛1 = 𝑝 n1 - синхронная скорость (скорость идеального холостого хода) f1 - частота питающего напряжения p - число пар полюсов двигателя mag@nvsu.ru 12 Устройство и режим работы 𝑛1 = 60 ∙ 𝑓1 𝑝 Если двигатель нагружен, то ротор больше не может следовать за полем статора. Э.д.с. ротора возрастает, что ведет к увеличению тока в роторе, пока не наступит динамическое равновесие момента двигателя MI и момента нагрузки. Разница между скоростью ротора n и синхронной скоростью n1 характеризуется величиной скольжения скорости ns 𝑛𝑠 = 𝑛1 − 𝑛 Скольжение s - это отношение скольжения скорости к синхронной скорости 𝑛𝑠 𝑛1 − 𝑛 𝑠= = 𝑛1 𝑛1 𝑛𝑠 = 𝑛1 − 𝑛 Частота тока в роторе 𝑓2 = 𝑠 ∙ 𝑓1 mag@nvsu.ru 13 Устройство и режим работы 𝑛1 = 60 ∙ 𝑓1 𝑝 Двигатели с короткозамкнутым ротором имеют обмотку сделанную из медных или алюминиевых прутьев, которые не доступны с наружи. Двигатели с фазным ротором имеют трехфазную обмотку ротора концы которой соединены с контактными кольцами расположенными на валу. Если эти концы короткозамкнуты, то характеристики двигателя такие же, как и для двигателя с корткозамкнутым ротором. Возможно соединить контактные кольца с реостатом, чтобы изменять сопротивление ротора и характеристику двигателя. Та же процедура может быть использована для обратного преобразования энергии ротора в сеть (субсинхронный выпрямительный каскад). В то же время скорость может варьироваться в определенных пределах. Несмотря на эти преимущества, почти всегда используются двигатели с короткозамкнутым ротором, т.к. они имеют более низкую стоимость и меньше изнашиваются (нет контактных колец). Специальная подгруппа-это барабанные двигатели. Статорная обмотка находится на жестко закрепленном валу. Ротор (оправа) расположен с внешней стороны и непосредственно приводит в движение механизм, например, ленту транспортера. mag@nvsu.ru 14 Устройство и режим работы Основные характеристики двигателя находятся на шильдике двигателя 3 ~ Mot.71 Трехфазный двигатель с высотой 71 мм (от середины вала до поверхности крепления) 1.10/1.95 A Номинальный ток при соединении звездой 1.1A. Номинальный ток при соединении треугольником 1.95 A 1410 rpm Номинальные обороты двигателя 1410 об/мин 380/220 V Соединение звездой для 380 В и Соединение треугольником для 220 В cosφ 0.75 Значение коэффициента мощности двигателя 0.75 0,37 kW Номинальная мощность на валу двигателя 0.37 кВт Is.KI. B Последняябуква определяет допускаемую температуру двигателя при продолжительном режиме работы. Существуют следующие изоляционные классы: E = 120°C B = 130 F = 155°C H = 180°C °C IP 54 Степень защищенности двигателя IP 54 - пыле и брызгостойкая обшивка 50 Hz Номинальная частота двигателя VDE 0530/84 Сертификат соответствия VDE обмоток (Стандарт) mag@nvsu.ru 15 Устройство и режим работы Номинальный момент двигателя может быть легко вычислен используя шильдик 𝑃н кВт ∙ 9550 0,37 кВт ∙ 9550 𝑀н = = 𝑛н обΤмин 1410 обΤмин = 2,5 Н ∙ м Мощности 𝑆 = 3 ∙ 𝑈1 ∙ 𝐼1 = 3 ∙ 380 ∙ 1,1 = 724 ВА 𝑃1 = 𝑆 ∙ cos 𝜑 = 724 ∙ 0,75 = 543 Вт КПД двигателя 𝑃н 0,37 𝜂= = = 0,68 68% 𝑃1 0,543 mag@nvsu.ru 16 Устройство и режим работы Uф - первичное фазное напряжение, В; I1 - фазный ток статора, А; I’2 - приведенный фазный ток ротора, А; Im - фазный ток намагничивания, А; R1 , R’2 - активные фазные сопротивления обмоток статора и ротора соответственно, последнее приведено к обмотке статора. Ом; x1 , x’2 -индуктивные фазные сопротивления, обусловленные полями рассеяния обмоток статора и ротора, последнее приведено к обмотке статора, Ом; Rm , xm активное и индуктивное сопротивление контура намагничивания, Ом; s - скольжение двигателя, о.е. mag@nvsu.ru 17 Устройство и режим работы Часть потребляемой электрической энергии преобразуется в тепло (PCU1) в сопротивлении обмоток статора R1. Другая (меньшая) часть есть потери в железе (PFe) на сопротивлении RFe. Оставшаяся часть энергии (Pd) передается через воздушный зазор на ротор. В роторе часть энергии (PCU2) расходуется на нагрев сопротивления R2’. Оставшаяся энергия, уменьшенная на величину фрикционных потерь Pfrict (потери в подшипниках и в вентиляторе), составляет механическую энергию на валу двигателя Энергетическая диаграмма асинхронного двигателя mag@nvsu.ru 18 𝑠= 𝑛𝑠 𝑛1 − 𝑛 𝜔1 − 𝜔 = = 𝑛1 𝑛1 𝜔1 Характеристики асинхронного двигателя 𝑈ф 𝐼′2 = 𝑅′2 𝑅1 + 𝑠 2 + 𝑥1 + 𝑥′2 2 3 ∙ 𝑈ф 2 ∙ 𝑅′2 𝑀= 2 𝜔1 ∙ 𝑠 ∙ 𝑀к = 𝑅′ 𝑅1 + 2 + 𝑥1 + 𝑥′2 𝑠 3 ∙ 𝑈ф 2 2 2 ∙ 𝜔1 ∙ 𝑅1 ± 𝑅1 + 𝑥1 + 𝑥′2 2 2 𝑅′2 𝑠к = ± 2 𝑅1 + 𝑥1 + 𝑥′2 2 mag@nvsu.ru 19 Характеристика режимов работы асинхронного электродвигателя 3 ∙ 𝑈ф 2 ∙ 𝑅′2 𝑀= 𝜔1 ∙ 𝑠 ∙ 𝑅1 + 𝑅′2 𝑠 2 + 𝑥1 + 𝑥′2 2 3 ∙ 𝑈ф 2 𝑀к = 2 ∙ 𝜔1 ∙ 𝑅1 ± 𝑅1 2 + 𝑥1 + 𝑥′2 2 𝑅′2 𝑠к = ± 𝑅1 2 + 𝑥1 + 𝑥′2 2 2 ∙ 𝑀к ∙ 1 + 𝑎 ∙ 𝑠к 𝑀= 𝑠 𝑠 + к + 2 ∙ 𝑎 ∙ 𝑠к 𝑠к 𝑠 𝑎= 𝑠к = 𝑠н ∙ 𝑅1 𝑅′2 𝑀к ± 𝑀н 𝑀к 𝑀н 2 −1 Если пренебречь малым активным сопротивлением , то получится формула, более удобная для расчетов на практике (т.н. упрощенная формула Клосса): 2 ∙ 𝑀к 𝑀= 𝑠 𝑠 к + 𝑠к 𝑠 mag@nvsu.ru 20 Характеристика режимов работы асинхронного электродвигателя Характерными точками механической характеристики,: 1. s=0, M=0 - при этом скорость вращения двигателя равна синхронной; 2. s=sН, M=MН - что соответствует номинальной скорости и номинальному моменту; 3. s=sк, M=Mк - критический момент в двигательном режиме; 4. s=1, M=MП - начальный пусковой момент. Двигательный режим Тормозной режим с отдачей энергии в сеть (режим рекуперативного торможения) Режим торможения противовключением Режим динамического торможения mag@nvsu.ru 21 Характеристики двигателя при падении напряжения Например, падение напряжения на 10 % вызывает уменьшение момента примерно на 19 %. Пусковой момент и максимальный момент уменьшаются пропорционально квадрату. 3 ∙ 𝑈ф 2 ∙ 𝑅′2 𝑀= 𝜔1 ∙ 𝑠 ∙ 𝑅′ 𝑅1 + 2 𝑠 2 3 ∙ 𝑈ф 2 𝑀к = 2 ∙ 𝜔1 ∙ 𝑅1 ± 𝑅1 2 + 𝑥1 + 𝑥′2 𝑠к = ± 2 𝑅′2 𝑅1 2 + 𝑥1 + 𝑥′2 mag@nvsu.ru 2 + 𝑥1 + 𝑥′2 2 22 Современные системы автоматизированного электропривода Тепловые режимы работы mag@nvsu.ru Режимы работы двигателя Режима работы двигателя различаются фактором протяженности цикла работы и нагревом. Фактор протяженности: протяженность цикла = • • • • Время загрузки Время загрузки + пауза продолжительный режим, кратковременный режим, повторно-кратковременный (прерывистый) режим, продолжительный режим с периодической нагрузкой. mag@nvsu.ru 24 Режимы работы двигателя • • • • продолжительная режим, кратковременный режим, повторно-кратковременный (прерывистый) режим, продолжительный режим с периодической нагрузкой. Работа машины при неизменной нагрузке Р и потерях Рv достаточно длительное время для достижения установившейся (неизменной) температуры всех её частей (Θmax). Этот режим является обычным для стандартных двигателей. Они могут быть постоянно нагружены своим номинальным моментом. mag@nvsu.ru 25 Режимы работы двигателя • • • • продолжительная режим, кратковременный режим, повторно-кратковременный (прерывистый) режим, продолжительный режим с периодической нагрузкой. Во время кратковременного режима S2 время работы с номинальной мощностью так мало, что температурный баланс не достигается. В течении длительных пауз двигатель полностью охлаждается. Двигатели, предназначенные для кратковременного режима работы, выпускаются заводами с нормированной длительностью работы в 10, 30, 60 и 90 мин. Следовательно, выбранный по каталогу двигатель для этого режима может быть загружен номинальной мощностью в течение указанного времени, и он будет полностью использован по нагреву. Мощность двигателя в кратковременном режиме S2 ориентировочно можно определить по формуле: 1 𝑃𝑆2 ≤ 𝑃𝑆1 ∙ ∆𝑡р 1−𝑒 𝑇 где: PS1 - номинальная мощность двигателя в длительном режиме S1; Т - постоянная времени нагрева двигателя При условии 𝑃𝑆1 𝑀К ≤ 0,8 ∙ 𝑃𝑆2 𝑀н mag@nvsu.ru 26 Режимы работы двигателя • • • • продолжительная режим, кратковременный режим, повторно-кратковременный (прерывистый) режим, продолжительный режим с периодической нагрузкой. Во время повторно-кратковременного ( прерывистого) режима S3 паузы так малы, что двигатель не успевает охладиться до температуры окружающей среды. Промышленно выпускаются двигатели, специально предназначенные для работы с повторно-кратковременной нагрузкой. Они получили широкое распространение в подъемнотранспортных установках. Такие электродвигатели обладают значительной перегрузочной способностью и повышенным пусковым моментом, что позволяет максимально использовать их по нагреву. В повторно-кратковременном режиме работы продолжительность цикла не превышает 10 мин. и режим характеризуется относительной продолжительностью включения, %: ПВ=15, 25, 40, и 60% ПВ = 𝑡 𝑡н н +𝑡п 𝑡 ∙ 100% = 𝑡н ∙ 100% ц где 𝑡н - время работы; 𝑡п - время паузы; 𝑡ц - время цикла. Для отличающегося от стандартного ПВ двигатель в повторнократковременном режиме развивает другую мощность, которая может быть найдена по приближенной формуле пересчета 𝑃н(каталог) ≥ 𝑃расч ∙ ПВрасч ПВн mag@nvsu.ru 27 Режимы работы двигателя • • • • продолжительная режим, кратковременный режим, повторно-кратковременный (прерывистый) режим, продолжительный режим с периодической нагрузкой. Перемежающимся номинальным режимом работы (S6) называется режим, при котором кратковременные периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с периодами холостого хода, во время которых двигатель не отключается, причем как рабочие периоды, так и периоды холостого хода не настолько длительны, чтобы превышения температуры частей машины могли достигнуть установившихся значений. Продолжительность одного цикла не должна превышать 10 мин. Режим характеризуется относительной продолжительностью нагрузки, %, , где tхх — время холостого хода. Нормируемые значения ПН = 15, 25, 40 и 60 %. ПВ = 𝑡н 𝑡н +𝑡хх ∙ 100% = 𝑡н 𝑡ц ∙ 100% где 𝑡н - время работы; 𝑡хх - время холостого хода; 𝑡ц - время цикла. Для отличающегося от стандартного ПВ двигатель в повторнократковременном режиме развивает другую мощность, которая может быть найдена по приближенной формуле пересчета 𝑃𝑆6 ≤ 𝑃𝑆1 ∙ 100 ПНн mag@nvsu.ru 28 • • • • Режимы работы двигателя (S4,S5,S7,S8) продолжительная режим, кратковременный режим, повторно-кратковременный (прерывистый) режим, продолжительный режим с периодической нагрузкой. Периодический повторно-кратковременный режим с влиянием пусковых процессов S4 Последовательность идентичных режимов работы, каждый из которых включает время пуска ΔtD время работы при постоянной нагрузке ΔtP, за которое двигатель не нагревается до установившейся температуры, и время стоянки ΔtR, за которое двигатель не охлаждается до температуры окружающей среды. mag@nvsu.ru 29 Режимы работы двигателя (S4,S5,S7,S8) Периодический повторно-кратковременный режим с влиянием пусковых процессов и электрическим торможением S5 Режим, включающий в себя те же элементы, что и S4 с дополнительным периодом ΔtF быстрого электрического торможения. Применительно к нашим изделиям этот режим относится к двигателям для привода лифтов. mag@nvsu.ru 30 Режимы работы двигателя (S4,S5,S7,S8) Периодический перемежающийся режим с влиянием пусковых процессов и электрическим торможением S7 Последовательность идентичных циклов, каждый из которых включает достаточно длительное время пуска ΔtD, время работы ΔtP с постоянной нагрузкой и быстрое электрическое торможение ΔtF. Так как режим не содержит пауз, то для него ПВ = 100%. Если электрическое торможение осуществляется реверсированием, то следует иметь в виду, что один реверс в тепловом отношении эквивалентен трем пускам. mag@nvsu.ru 31 Режимы работы двигателя (S4,S5,S7,S8) Периодический перемежающийся режим с периодически изменяющейся частотой вращения S8 Это последовательность идентичных циклов, каждый из которых включает время разгона ΔtD, работу ΔtP1 с неизменной нагрузкой и частотой вращения n1, электрическое торможение, работу ΔtP2 при другой частоте вращения n2 и нагрузке, электрическое торможение и т.д. mag@nvsu.ru 32 mag@nvsu.ru 33