Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
Математическая модель искусственной нейронной сети
для управления робототехническим комплексом
в экстремальных условиях
Е.Г. Царькова
Федеральное казенное учреждение «Научно-исследовательский институт Федеральной
службы исполнения наказаний», НИЦ-1, Москва
Аннотация: В работе рассматривается математическая модель искусственной нейронной
сети с запаздыванием в аргументах функций состояния и управления, предназначенной
для управления робототехническим комплексом при проведении аварийно-спасательных
операций в экстремальных условиях. Процесс обучения рассматриваемой искусственной
нейронной сети описан задачей оптимального управления с запаздыванием. С
использованием принципа максимума Понтрягина и метода быстрого автоматического
дифференцирования разработан метод решения полученной задачи оптимального
управления. Приведены результаты работы программного средства, при создании
которого использован алгоритм построения приближенного оптимального управления
рассматриваемой задачи.
Ключевые слова: аварийно-спасательные работы, искусственная нейронная сеть,
нейроуправление, робототехника, принцип максимума, безопасность.
Сегодня
успехи
в
развитии
отечественной
робототехники
обеспечивают возможность использования робототехнических комплексов
(РК) в проведении аварийно-спасательных работ и в пожаротушении.
Разработка и внедрение в практическую деятельность спасательных служб
автоматизированных комплексов, позволяющих снизить риск гибели людей
при проведении спасательных мероприятий в экстремальных условиях
является перспективным направлением современных научных исследований.
Актуальность разработки таких систем, в том числе, продиктована растущим
уровнем
террористических
угроз,
реализация
которых
на
крупных
производственных, химически и радиационно опасных объектах может
приводить к техногенных авариям и катастрофам с непредсказуемыми
последствиями. В связи с этим целесообразна разработка моделей и
алгоритмов управления робототехническими системами, предназначенными
для использования спасательными службами при ликвидации чрезвычайных
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
ситуаций на важных объектах. К таким объектам могут быть отнесен ряд
производственных и иных объектов уголовно-исполнительной системы
Российской Федерации, характеризующихся большим скоплением людей и
существованием высокого уровня криминогенных угроз.
Для
разработки
применение
роботизированных
искусственных
рассматривается
роботизированным
нейронных
построение
комплексов
сетей
(ИНС).
нейросетевой
спасательным
эффективно
В
модели
комплексом,
работе
управления
предназначенным
для
проведения аварийно-спасательных работ в экстремальных условиях.
За последние десятилетия искусственные нейронные сети активно
внедряются в различные сферы деятельности человека [1, 2, 3, 4]. В области
робототехники ИНС активно применяются при создании различных
мобильных роботов и систем автопилотирования наземными и летательными
аппаратами.
Подобные
технические
комплексы
находят
широкие
перспективы применения в разработке систем поддержки принятия решений
при
работе
в
экстремальных
условиях
[5].
При
этом
наиболее
перспективными для применения в сложных технических системах являются
динамические нейронные сети, обладающие способностью, в отличие от
статических ИНС, адаптировать свою структуру и параметры к входным
данным
за
счет
повторяющегося
процесса.
Данное
свойство
ИНС
обеспечивают преимущество их применения в сравнении со статическими
моделями. Кроме того, в моделировании процессов, протекающих в сложных
управляемых
технических
системах,
необходим
учет
запаздываний.
Запаздывания возникают при передаче сигналов от управляющих устройств к
исполнительным механизмам. Данный факт приводит к необходимости
рассмотрения ИНС с нетривиальной архитектурой. Согласно предлагаемому
подходу для обучения таких нейронных сетей требуется осуществить поиск
решения задачи оптимального управления (ЗОУ) с запаздыванием. Наиболее
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
полно на данный момент исследованы задачи с запаздываниями в функции
состояния [6]. В исследовании рассматриваются запаздывания не только в
функции состояния, но и в функции управления, используемой при
построении
нейросетевой
модели
управления
робототехническим
комплексом с обратной связью, что обеспечивает уточнение модели, а также
служит
разработке
численного
алгоритма
построения
оптимального
управления системой. Указанные выше факторы обуславливают новизну,
актуальность и практическую значимость исследования.
Рассмотрим математическую модель ИНС, использующуюся для
объезда препятствий при управлении передвижением РК, имеющего
дифференциальный
привод
колес.
Автоматическое
расстояние
до
препятствия обеспечивает возможность установления соответствующей
скорости и направления дальнейшего движения РК, при этом скорости
левого и правого привода для передвижения комплекса в необходимом
направлении зависит от входных параметров – расположения препятствий и
коэффициента ускорения. Для описания соответствующей ИНС, содержащей
N нейронов, используется нелинейная система дифференциальных уравнений
(ДУ) второго порядка с запаздыванием [4]:
N
xi (t ) 1 i xi 2 (t ) vi 2 xi (t ) ui (t ) wij (t ) x j (t h j ) xi (t ) , i 1,..N , t [0, T ] .
(1)
i 1
С
учетом
обозначений:
xi (t ) yi (t ) ,
z j (t ) yi (t h j ), i, j 1,..N , t [0, T ] ,
уравнение (1) перепишется в виде системы ДУ первого порядка следующего
вида:
xi (t ) yi (t ) , j 1, N , t [0, T ] ,
(2)
N
yi (t ) vi 2 xi (t ) 1 i xi 2 (t ) ui (t ) wij (t ) y j (t h j ) y i (t ) .
j 1
Учитываются условия на состояния нейронов и величину внешних
воздействий на управляемую систему на начальном отрезке времени:
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
(3)
xi (0) ai , xi (t ) i (t ), i 1, N , t [ max{h j }, 0] ,
ui (t ) i (t ), i 1, N , t [ max{h j }, 0] ,
где i (t ), i (t ) – заданные функции.
Вводятся следующие ограничения на управляющие воздействия:
(4)
ui (t ) Bi , wij (t ) Cij .
В введенных соотношениях xi (t ) определяет амплитуду колебаний i-го
нейрона в момент времени t; y i (t ) выражает скорость изменения амплитуды
колебаний i-го нейрона; N – общее число нейронов; T – заданное время
протекания процесса; 0, – коэффициенты, которые характеризуют
общее воздействие на i-ый нейрон всего ансамбля нейронов. Так,
оказывает влияние на величину силы затухания колебания i-го нейрона; vi
определяет собственную частоту колебания i-го нейрона. Вводятся весовые
коэффициенты ансамбля нейронов wij (t ) , i, j 1, N , которые подбираются в
зависимости от цели построения ИНС. В рассматриваемой задаче весовые
коэффициенты играют роль функций управления. В рассмотрение введены
функции управления ui (t ), i 1, N , характеризующие величину внешнего
воздействия на ансамбль нейронов. В рассматриваемой модели учитываются
запаздывания, возникающие при передаче сигнала от одного нейрона к
другому. Целью управления введенной в рассмотрение ИНС является ее
обучение. Для достижения данной цели необходимо построить процесс, при
котором в конечный момент времени характеристики нейронов будут
совпадать с заданными терминальными условиями, а также осуществить
построение
оптимального
управления
u (t )
ансамблем
нейронов,
обеспечивающего минимизацию целевого функционала.
Рассматриваемая задача оптимального управления формализуется
следующим образом. Требуется минимизировать функционал:
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
(5)
T
I (u ) M f 0 t , x(t ), u (t ), w(t ) dt M 3Ф( x(T )) inf
0
при заданных ограничениях (2) – (4). Здесь константы M , M 3 играют роль
весовых коэффициентов. Необходимо осуществить построение оптимального
процесса, минимизирующего функционал (5) при заданных ограничениях
N
N
N
i 1
i , j 1
i 1
(2) – (4). Пусть f0 t , x(t ), u (t ), w(t ) M1 ui 2 (t ) M 2 wi 2 (t ), Ф( x(T )) xi (T ) Ai .
2
Целевой функционал принимает следующий вид:
N
N
N
2
I (u ) M 1 ui 2 (t ) M 2 wi 2 (t ) dt M 3 xi (T ) Ai inf .
i 1
i , j 1
i 1
0
T
(6)
Цель управления динамикой нейронной сети состоит в минимизации
рассматриваемого функционала. В рассматриваемом функционале слагаемые
при коэффициенте M 1 отвечают за величину энергии источника внешних
управляющих воздействий,
слагаемые при весовом коэффициенте M 2
выражают внутреннюю энергию сети, слагаемые с коэффициентом M 3
отвечают за
конечное состояние системы. Для построения численного
решения задачи обучения нейронной сети применим принцип максимума
Понтрягина [7, 8]. Функция Понтрягина в рассматриваемой задаче имеет вид:
N
N
N
i 1
i , j 1
i 1
H 0 , x, y, z, p(t ), q(t ), u, w 0 M 1 ui 2 (t ) 0 M 2 wi 2 (t ) pi (t )yi
N
N
2
qi (t ) vi xi 1 i xi 2 ui wij z j y i .
i 1
j 1
Здесь z j (t ) yi (t h j ), i, j 1,..N , t [0, T ] , введенные функции p(t), q(t) являются
сопряженными вектор-функциями.
Построим сопряженную систему уравнений. Используем принцип
максимума для задачи с запаздыванием в аргументе. В соответствии с
особенностями задачи сопряженные вектор-функции будут удовлетворять
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
системе ДУ с опережающим аргументом. При этом условие максимума
примет вид:
N
N
N
0 M 1 ui 2 (t ) M 2 wij 2 (t ) pi (t ) yi
i , j 1
i , j 1
i 1
N
N
qi (t ) vi 2 xi 1 i xi 2 ui wij z j y i
i 1
j 1
N
N
N
N
pi (t ) y i qi (t ) vi 2 x i 1 i xi 2 max uU 0 M 1 ui 2 (t ) qi (t )ui
i
i , j 1
i 1
i 1
max wW
Для
построения
N
N
2
0 M 2 wij (t )
i
i 1
приближенного
q (t )w z
N
j 1
i
ij
численного
j
yi .
решения
используем
дискретную аппроксимацию рассматриваемой задачи. Разбиваем интервал
[0,T] равномерно на q слоев. Аппроксимируем интеграл по правилу левых
прямоугольников, систему ДУ аппроксимируем по схеме Эйлера. В
результате
получаем
следующую
дискретную
задачу
оптимального
управления:
N
N
2
2
I u , w M 1 u i M 2 wij t M 2Ф( x q ) inf ,
i 1
i , j 1
(7)
xi l 1 xi l tyi l , i 1, N , l 1, q ,
(8)
N
2
2
l
yi l 1 yi l t vi l xi l 1 i xi l ui l wij l y j j yi l ,
j 1
xi 0 ai , yi l i l , l [ max{v j },0] , ui l Bi .
(9)
(10)
В соотношениях (7) - (10) индекс i 1, N означает номер координаты
вектора, индекс l 1, q определяет номер нейронного слоя. Для решения
дискретной задачи оптимального управления (ДЗОУ) используем метод
быстрого автоматического дифференцирования (БАД) [9]. Для реализации
реализующего метод градиентного спуска вычислительного алгоритма,
построенного с учетом полученных соотношений и метода БАД, автором
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
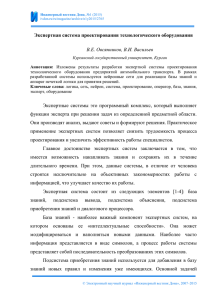
разработано программное средство в среде IDE Lazarus. Схема алгоритма
приведена на рис. 3.
Рисунок 1 – Схема вычислительного алгоритма
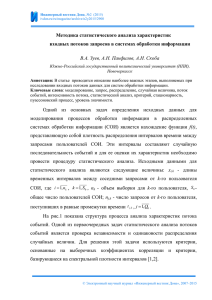
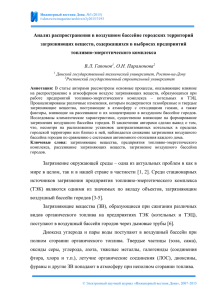
При заданных значениях штрафных коэффициентов M 1 , M 2 , M 3 и
параметров задачи программой выполнено 13946 итераций. Полученные
результаты приведены на рис. 1 – 3.
Рис. 1. - Графики
Рис. 2. – Графики
Рис. 3. – Графики
функций состояния
управляющих
значений весовых
воздействий
коэффициентов
На рис. 1 приведены графики трех нейронов, участвующих в построении
модели ( x0 (t ), x1 (t ), x2 (t ) ). Графики, представленные на рис. 2, отражают
изменение функций управления u0 (t ), u1 (t ), u2 (t ) . На рис. 3 приведены графики
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
управлений wij (t ), i 0, 2, j 0, 2. Критерием останова в работе алгоритма
служит достижение допустимой величины ошибки обучения ei 0, 08 либо
выполнение максимально допустимого количества выполненных итераций
Itmax 15000 . Ключевой особенностью разработанного алгоритма является
возможность его применения для моделирования ИНС, динамика которых
описывается системой ДУ с запаздываниями.
Обозначим через X p , Yp координаты РТК, через VBR ,VBL линейные
скорости, соответствующие левому и правому приводу, полученные с
использованием обученной ИНС. Пусть далее L, обозначают ширину у угол
поворота, выполняемого РТК, [ X 0 , Yo ] - координаты начального положения
РТК. Тогда координаты РТК в каждый момент времени заданного
временного
интервала
могут
быть
вычислены
с
учетом
системы
дифференциальных уравнений:
V VBL
X p (t ) BR
sin X 0 ,
2
V VBL
Yp (t ) BR
2
(11)
cos Y0 , t [0, T ] .
Рассмотренная математическая модель ИНС может быть использована для
решения прикладных задач робототехники, направленных на разработку
технических средств для проведения аварийно-спасательных работ в
экстремальных условиях. В силу гибкости, устойчивости и возможности
адаптации к внешним условиям, ИНС позволяют решать задачи оптимизации
управляемых систем в широком диапазоне параметров [10].
Литература
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
1.
Бахтинова Ч.О., Чунаева М.Э. Автоматизация системы контроля
качества при организации строительства особо опасных и технически
сложных объектов в России // Инженерный вестник Дона, 2022, № 3.
URL: ivdon.ru/ru/magazine/archive/n3y2022/7511.
2.
Душкин А.В., Цветков В.В. Вопросы моделирования состояний
инженерно-технических средств охраны и надзора // Вестник Воронежского
института ФСИН России, 2014, №3, с. 28-31.
3. Сумин В.И., Чураков Д.Ю., Царькова Е.Г. Разработка моделей и
алгоритмов информационных структур и процессов объектов особой
важности // Промышленные АСУ и контроллеры, 2019, № 4. С. 30-39.
4. Каяшев А.И., Рахман П.А., Шарипов М.И. Анализ показателей
надежности локальных компьютерных сетей // Вестник УГАТУ. 2013. №5,
с. 140-149.
5. Омельченко
государственного
В.В.
Информационное
управления
обеспечение
национальными
системы
ресурсами:
риск-
ориентированный подход // Правовая информатика, 2019, № 1. С. 4-17.
6. Tsarkova E., Belyaev A., Lagutin Y., Matveev Y., Andreeva E. Technical
Diagnostics of Equipment Using Data Mining Technologies // Safety in Aviation
and Space Technologies: Select Proceedings of the 9th World Congress «Aviation
in the XXI Century». Cham: Springer, 2022. Pp. 345-356.
URL: link.springer.com/chapter/10.1007/978-3-030-85057-9_30.
7.
Игнатьева
О.В.
Архитектурные
приемы
при
разработке
программного обеспечения, зависимого от интерфейса пользователя //
Инженерный вестник Дона, 2022, №2.
URL: ivdon.ru/ru/magazine/archive/n2y2022/7478.
8. Вентцель Е.С. Исследование операций. М.: Советское радио, 1972.
55 с.
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
9. Dushkin A.V., Kasatkina T.I., Novoseltsev V.I., Ivanov S.V. An
improved method for predicting the evolution of the characteristic parameters of an
information system // Journal of Physics: Conference Series, Vol. 973, № 1, 2018.
P. 012031.
URL: iopscience.iop.org/article/10.1088/1742-6596/973/1/012031/pdf.
10. Dubrovin A.S., Ogorodnikova O.V., Tsarkova E.G., Andreeva E.A.,
Kulikova T.N. Analysis and visualization in graph database management
systems // Journal of Physics: Conference Series: Current Problems. Voronezh,
V.1902, № 1, 2021. P. 012059.
URL: iopscience.iop.org/article/10.1088/1742-6596/1902/1/012059.
References
1.
Bahtinova CH.O., CHunaeva M.E. Inzhenernyj vestnik Dona, 2022,
№3. URL: ivdon.ru/ru/magazine/archive/n3y2022/7511.
2.
Dushkin A.V., Cvetkov V.V. Vestnik Voronezhskogo instituta FSIN
Rossii, 2014, №3, pp.28-31.
3.
Sumin V.I., CHurakov D.YU., Car'kova E.G. Promyshlennye ASU i
kontrollery, 2019, № 4. pp. 30-39.
4.
Kayashev A. I., Rahman P. A., SHaripov M. I. Vestnik UGATU,
2013, №5, pp. 140-149.
5.
Omel'chenko V.V. Pravovaya informatika, 2019, № 1. pp. 4-17.
URL: ivdon.ru/uploads/article/pdf/IVD_86_Akolzin.pdf_2394.pdf.
6. Tsarkova E., Belyaev A., Lagutin Y., Matveev Y., Andreeva E. Safety in
Aviation and Space Technologies: Select Proceedings of the 9th World Congress
«Aviation in the XXI Century». Cham: Springer, 2022. pp. 345-356.
URL: link.springer.com/chapter/10.1007/978-3-030-85057-9_30.
7. Ignat'eva O.V. Inzhenernyj vestnik Dona, 2022, №2.
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015
Инженерный вестник Дона, №1 (2015)
ivdon.ru/ru/magazine/archive/n1y2015/XXXX
URL: ivdon.ru/ru/magazine/archive/n2y2022/7478.
8. Ventcel' E.S. Issledovanie operacij [Operations research]. M.: Sovetskoe
radio, 1972. 55 p.
9. Dushkin A.V., Kasatkina T.I., Novoseltsev V.I., Ivanov S.V. Journal of
Physics: Conference Series. 2018, P. 012031.
URL: iopscience.iop.org/article/10.1088/1742-6596/973/1/012031/pdf.
10. Dubrovin A.S., Ogorodnikova O.V., Tsarkova E.G., Andreeva E.A.,
Kulikova T.N. Analysis and visualization in graph database management
systems // Journal of Physics: Conference Series: Current Problems. Voronezh,
V.1902, № 1, 2021. P. 012059.
URL: iopscience.iop.org/article/10.1088/1742-6596/1902/1/012059.
© Электронный научный журнал «Инженерный вестник Дона», 2007–2015