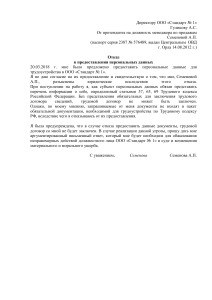
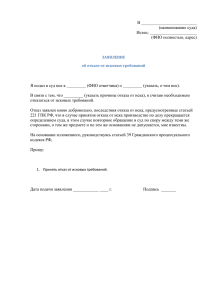
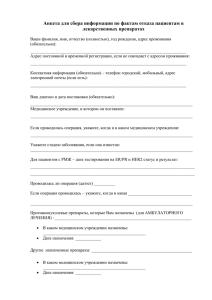
Лекции 4 -9 ИНФОРМАЦИОННО-ЛОГИЧЕСКИЕ МЕТОДЫ ПОИСКА ОТКАЗОВ 1. Информацинный характер процессов поиска отказа (Лекция 4) Диагностический процесс можно сформулировать как процесс поиска отказавшего элемента или, что то же самое, определение состояния системы. В качестве исходной информации при решении задач диагностики используются симптомы отказа и признаки нормального функционирования системы (ПНФ). Симптом отказа системы является информация об отклонениях от нормы параметров системы, характеризующих ее работоспособность или состояние, а также об изменении этих отклонений во времени. Речь идет о параметрах, которые контролируются в процессе работы системы, в процессе технического обслуживания и т.п. Симптомом отказа может быть необычный шум работающего объекта, его чрезмерный нагрев, недостаточная скорость движения исплнительного механизма, течь и т.д. Здесь следует остановиться на понятиях симптома отказа и отказ. В практике диагностики эти понятия зачастую смешивают. Например, при обнаружении в процессе эксплуатации признаков дефекта ее элементов (течь трубопровода, разрыв корпуса гидроцилиндра) последние идентифицируются как отказавшие, и считается, что система находится в состоянии отказа по этому элементу. Однако при замене этого элемента отказ незамедлительно повторяется, что свидетельствует о том, что система восстановлена не была при замене вышедшего из строя аппарата. Очевидно, это произошло потому, что отказ как таковой не был установлен, а аварийный выход элементов из строя является только одним из симптомов отказа. В сложной системе отказы различных элементов благодаря наличию связей могут иметь один и тот же симптом. Например, падение давление на насосной установке отражается симптомом показания манометра ниже номинального уровня. Отказ мог произойти в результате: зависания плунжера предохранительного клапана, износа насоса, поломки манометра, повышенных утечек в распределителе. С другой стороны, отказ одного элемента может иметь различные симптомы. Например, понижение объемного КПД насоса приводит к падению скорости движением рабочего органа, с одной стороны, и к падению темпа нарастания давления, с другой стороны. Таким образом, каждому элементу системы может соответствовать комплекс симптомов и наоборот. Определение взаимосвязей между симптомами и отказами может проводиться различным образом и различными методами, среди которых следует выделить логический и вероятностный как наиболее типичные. Основной характерной чертой диагностического процесса является анализ симптомов отказа и ПНФ системы, с целью уточнения ситуации и локализации отказавшего элемента или блока, в котором находится последний. Часто для определения состояния системы недостаточно информации, содержащейся в симптомах отказа и ПНФ. В этом случае прибегают к испытаниям (проверкам). Программу испытаний можно определить различным образом. Программы могут быть гибкими и жесткими. При жесткой программе поиска последовательность проверок определена заранее и в процессе поиска не меняется. При гибкой программе поиска характер каждой очередной проверки устанавливается в ходе диагностического процесса, т.е. решение принимается после анализа результатов предыдущего испытания. Задача разработки диагностического процесса направлена к тому, чтобы добиться наибольшей эффективности по определенному критерию. Такими критериями могут быть: продолжительность диагностирования проверок N; стоимость процесса C и др. В t; общее число ходе разработки последовательности операций диагностирования возникает задача оптимизации по этим критериям. Очевидно, что последовательность операций, соответствующая оптимальному значению критериев, является наилучшей. Для оптимизации процесса необходимо выяснить закономерности получения и обработки информации о состоянии системы. Таким образом, при разработке диагностического процесса можно выделить несколько этапов, образующих алгоритм, который схематично представлен на рисунке 1. Анализ симптомов отказа и ПНФ гидросистемы Обработка информации Определение программы проверок Принятие решения Локализация отказа Рисунок 1 – Обобщенный алгоритм поиска отказа 2. Энтропия состояния отказавших систем и информационная ценность проверок (Лекция 5-6) Как было отмечено выше, диагностический процесс связан с получением и переработкой информации, необходимость в которой возникает всякий раз, когда существует неопределенность исхода некоторого испытания (проверки). Неопределенность состояния системы (энтропия системы) определяется в основном количеством возможных состояний системы. Здесь необходимо уточнить, что имеется в виду под состоянием системы. Будем считать, что отказ одного элемента есть отказ системы. Тогда количество возможных состояний системы N x i 1 где = 1,2,3,... xi N i N 1, - количество элементов в системе; - состояние системы при отказе N -ого элемента. Следует учитывать, что в общем случае в системе может отказать сразу несколько элементов, причем симптомы отказа могут быть одними и теми же. При этом система может находиться сразу в нескольких состояниях или, другими словами, образовывать новые состояния, связанные с выходом из строя нескольких элементов. Если считать, что состояние yi соответствует выходу из строя k элементов, то общее число возможных событий M N N! . k 1 k! ( N k )! yi i 1 (1) Уже при двух независимых отказах в системе и при количестве аппаратов около 100 шт. в сложных гидроприводах путевых и строительно-дорожных машин количество возможных состояний 100 100 100! 100! y 1(100 1)! 2!(100 2)! 5050 . i 1 i k 1 Очевидно, энтропия в этом случае весьма велика. Однако известно, что вероятность возникновения двух независимых отказов одновременно весьма мала. Поэтому при разработке методики поиска отказа наибольшее значение будет представлять случай, когда в системе предполагается наличие не более чем одного отказа (по условию (6)). В этом случае энтропия системы зависит от числа элементов. При N= 1, Н(N =1) = 0 С увеличением N величина Н возрастает. Уместно указать основные свойства энтропии. 1. Энтропия обращается в 0, когда одно из состояний системы достоверно, а другие невозможны. 2. Энтропия системы с конечным множеством состояний максимальна, когда эти состояния равновероятны. Энтропия может определяться следующим образом: N Н Pi log Pi i 1 где Pi , (2) – вероятность того, что система находится в одном из состояний. На наш взгляд, в выражение (8) целесообразно подставлять значение условной вероятности, т.е. такой, которая учитывает вероятность совместного появления у объекта диагностики диагноза и набора признаков (симптомов) К1...Кj : k D P ( Di k j ) P ( Di ) P j P ( k j ) P i k j Di Отсюда, как известно, k P j D i P ( Di k j ) P ( Di ) P(k j ) где P(Di) – вероятность диагноза D, определяемая по статистическим данным (априорная вероятность); P(kj/Di) диагноза - вероятность появления комплекса признаков kj при условии Di; P(kj) - вероятность появления признака kj во всех объектах, независимо от состояния объекта (диагноза). Как следует из формулы вероятности , если известны значения P(Di) и P(kj/Di), то они определяют величину P(kj), т.е. специальное вычисление P(Di/kj) не требуется. P(Di/kj) – вероятность диагноза после того, как стало известно наличие в гидросистеме комплекса признаков k1.......kj (апостериорная вероятность). Как видно, метод, основанный на формуле вероятности (метод Байеса), требует довольно значительного объема статистической информации об отказах системы. Легко видеть, что если P(kj/Di) =1, т.е. при наличии состояния Di всегда появляется признак (симптом) kj, то мы приходим к выражению (8). В условиях недостатка статистической информации можно воспользоваться методом экспертных оценок величины P(Di/kj). При невозможности определения энтропии системы через вероятность можно воспользоваться выражением : N H i log i , i 1 где βi – коэффициент отказа i -того элемента, i i N i i 1 где λi - число отказов i-того типа за время t. Предполагается что поток отказов простейший. Данная оценка не учитывает наработку элементов. Между тем, введение значения наработки может существенно повлиять на величину коэффициента отказа. Поэтому введем усовершенствованный вариант данной оценки: bi i t i N t i 1 , i i где ti – наработка i-того элемента. При Р1= Р2…...= РN или β1 = β2 …...= βN H(N)=-log2(N). Также имеем N H ( N ) Pi log 2 Pi log 2 N i 1 или или b1=b2 …...= bN N H ( N ) i log 2 i log 2 N i 1 или N H ( N ) bi log 2 bi log 2 N . i 1 Энтропия системы тем меньше, чем больше различаются между собой значения вероятности отказа элементов, входящих в систему. Энтропия обладает свойством аддитивности, т.е. при объединении нескольких независимых систем их энтропии складываются: H(N1; N2) = log2N1·N2 = log2N1+ log2N2 = H(N1) +H( N2). Соответственно, вклад каждого элемента в общую энтропию равен hi = - Pi ·log2Pi или hi = - βi ·log2βi или hi = -bi ·log2bi. Информация, полученная в ходе некоторой проверки, очевидно, будет равна разности в энтропии системы до и после проверки: Ij = Hj-1 – Hj, где Ij – информация, полученная на j -том испытании (поверке); Hj-1 Hj - энтропия системы до j -того испытания; - энтропия системы после j -того испытания. Если в результате испытания выясняется, какой из элементов отказал, то H= 0 и справедливо выражение I= -H, I Pi log 2 Pi т.е. Переписывая это выражение как I Ii , приходим к выражению, определяющему информационную ценность каждой проверки: I i Pi log 2 Pi или I i i log 2 i или I i bi log 2 bi . (9) Данное выражение имеет основополагающее значение для разработки эффективного алгоритма поиска неисправностей в системе. Количество полученной информации в результате каждой проверки определяется такими вероятностными характеристиками для проверяемого элемента, как условная вероятность выхода из строя при некотором наборе признаков или коэффициент отказа (с учетом наработки элемента или без нее). Отсюда следует важный вывод: если в процессе жесткого поэлементного тестирования мы проведем ряд проверок элементов, у которых значения bi. Pi , βi , малы, то количество информации, нами полученной, может оказаться существенно меньше, чем при проведении одной проверки, но с оценкой состояния элемента с высоким значением Pi , βi , bi. Приведенные теоретические посылки позволяют, воспользовавшись связью между количеством информации и вероятностью отказов элементов, разработать наиболее эффективный алгоритм поиска, учитывающий структуру системы и вероятностные характеристики ее элементов. Необходимость переработки значительного количества информации в процессе поиска отказа в сложных системах определяет задачу разработки оптимальной процедуры поиска. В качестве критериев оптимальности процедуры поиска могут быть выдвинуты следующие: – продолжительность времени поиска отказа; – количество тест-проверок; – стоимость диагностирования. Перечисленные критерии взаимосвязаны, однако удовлетворить всем трем одновременно – весьма сложная задача, требующая большого объема предварительных данных в каждом конкретном случае. В то же время разработка алгоритма поиска на базе только одного критерия вызовет, очевидно, известные трудности при реализации. При этом необходимо иметь в виду, что вследствие свойства аддитивности энтропии сложной системы, количество информации, требуемой для ее снятия, принципиально не зависит от способов ее получения, другими словами, с увеличением числа испытаний количество информации не изменится. Действительно, если до первой проверки вероятность отказа элемента i Pi0 = A1, а после нее Pi1 = A2, то количество информации, полученное в результате первой проверки I1 Если после второй проверки отказ обнаружен (т.е информации, полученное в результате нее, I2 = log2A2 - log2A1. Pi2=1), то количество = log21 - log2A2. Общее количество информации в результате двух проверок I = I1 +I2 = log2A2 - log2A1+ log21 - log2A2 = - log2A1. Если же состояние элемента полностью выясняется после первой проверки, то имеем I' = log21 - log2A1= - log2A1, т.е. I =I' , что и требовалось доказать. Отсюда следует важный вывод: количество информации, получаемой в процессе диагностирования, не зависит от метода поиска, а следовательно, и от критерия эффективности поиска. В этом случае различие в эффективности алгоритмов поиска будет определяться скоростью получения информации, с одной стороны, и стоимостью получения информации, с другой стороны. Скорость получения информации можно определить как V=I/t, где V – скорость получения информации; I – количество информации; t – время, затраченное на получение информации. Количество информации на единицу затрат оцениваем как S = I/c, где c - затраты на получение информации. Формула показывает, сколько информации можно получить на единицу затрат. Можно предложить следующий обобщенный критерий эффективности диагностического процесса: KI = V·S = I2/t·c или упрощенно KI = I/t·c. (3) Данный критерий учитывает основные факторы, влияющие на эффективность процесса диагностирования. Если процесс получения информации разбит на несколько этапов (проверок) j=1, 2, 3 .....n, то на каждом этапе мы имеем свое значение KIj : KIj = Ij/tj·cj; KIn = In/tn·cn и т.д. В случае поэлементных проверок мы имеем на каждом элементе свое значение критерия K I. Теоретически возможны два случая: 1. Если все элементы равнонадежны (или равны коэффициенты отказа) b1= b2 =.....bn, время испытаний одинаково t1= t2 =.....= tn и затраты на каждое испытание также одинаковы с1 = с2 = ......= сn, то имеем KI1 = KI2 = ....... = KIn. 2. Если b1≠ b2 ≠.....≠bn, t1≠ t2 ≠.....≠ tn, с1 ≠ с2 ≠ ......≠ сn, то следует ожидать, что значения KI также будут различны KI1 ≠ KI2 ≠....... ≠KIn Однако, в общем случае, учитывая что время испытаний различно, коэффициенты отказов элементов различны, и стоимость проверок также различна, то возможно в некоторых случаях KIm = KIm±i . Несмотря на достоинства предложенного критерия в практике представляется невозможным игнорировать критерий количества тест-проверок. Для некоторых машин, например, работающих в "окно" на железнодорожных перегонах, первостепенное значение имеет поддержание их в состоянии, обеспечивающем немедленное применение по назначению. Для таких систем главенствующее значение имеет время поиска отказа, которое определяется в основном количеством тест-проверок (при прочих равных условиях, например, одинаковой аппаратуре, квалификации персонала и т.п.). Поэтому количество тест-проверок, в зависимости от постановки оптимизационной задачи, может выступать как параметр управления или ограничения, т.е. N x j 1 где xj N– j M , – количество тестов вида j; количество элементов в системе; M – возможное количество тестов типа j. В общем случае весь процесс диагностирования состоит из нескольких этапов, включающих в свою очередь некоторый набор испытаний по разработанной заранее жесткой или гибкой программе. Оптимальный процесс предполагает немедленное использование полученной информации, т.е. содержание каждого этапа зависит от результатов, полученных на предыдущем этапе. Тогда оптимальный диагностический процесс будет характеризоваться рядом KmaxI1 ; KmaxI2 ;…....K In, где n –число этапов (испытаний) до обнаружения отказавшего элемента. На каждом этапе из всех возможных проверок выбирается та, которая обеспечивает максимальное значение K In → max . (4) Рассматривая целевую функцию в виде (4), следует иметь в виду, что применение того или иного теста зависит от типа системы, квалификации персонала, опыта эксплуатации, возможности проведения теста типа j на i-том элементе системы, минимально необходимого количества измеряемых параметров и возможности их аппаратурной реализации на i -том элементе системы, схемы контрольных точек, алгоритма обеспечения моделей поиска отказа. Оптимальная программа поиска может, следовательно, строиться по разному. В практике диагностики применяются следующие методы: метод поэлементных проверок, метод групповых проверок, метод логического анализа симптомов отказа, комбинированные. Каждый из них позволяет получить оптимальную программу поиска отказа только в конкретной ситуации. 3. Разработка метода локализации подгруппы, содержащей отказ (Лекция 7) В общем случае при поиске отказа в системе нет необходимости проверять все элементы системы подряд. Наиболее эффективным является проведение такого поиска в два этапа: 1) определение подгруппы элементов, содержащей отказ, за счет чего резко сужается поле поиска и соответственно уменьшается энтропия; 2) определение собственно отказавшего агрегата. Естественным методом деления на группы является такое деление, при котором одна группа соответствует одной подсистеме исполнительного механизма, например группа механизма подачи, механизма вращения и т.д. При этом необходимо учитывать специфику рассматриваемых машин. Не всегда, однако, есть возможность только на базе анализа схемы разбить систему на группы оптимальным образом, хотя наибольший эффект достигается именно при учёте схемного решения. Процесс разбиения на группы может быть формализован. В качестве исходных формируются группы, точно отражающие процесс функционирования каждой подсистемы, в нашем случае Исходные группы преобразуются по принципу формирования групп из элементов, повторяющихся в исходных группах. Дальнейшие преобразования могут производиться на базе объединения полученных групп. В итоге можно получить упрощенную схему объекта, состоящую из укрупненных групп элементов, удобную для логического анализа. Рассмотрим схему на рис.2 Здесь уi, хi – выходные и входные параметры для каждой группы соответственно. Запишем функции истинности для выходных параметров у1, у2, у3: у11=А1’ & А6’ & А3’; у12=А2’& А6’& А3’; у21=А1’& А6’&А4’; у22=А2’& А6’& А4’; у31=А1’ & А6’& A5’; у32=А2’& А6’& A5’, где & – знак конъюнкции. У1 У2 У3 А4' А3' А5' Х У6 У4 У5 А1' А2' Х1 Х2 Рис. 2 – Укрупненная схема-структура объекта А6' Х3 Анализируя логические уравнения, нетрудно локализовать подгруппу, содержащую неисправный аппарат исходя из предположения, что в системе нет двух одновременных отказов. Рассуждения в этом случае довольно просты. Например, пусть отказал агрегат, входящий в группу №6. Следовательно, у11у32=0. Такая ситуация возможна лишь тогда, когда отказ содержится в подгруппе, входящей во все уравнения системы. Такой подгруппой является подгруппа А6’. Данное рассуждение справедливо только в том случае, когда в системе имеется только один отказавший элемент - т.е поток отказов ординарный. 4. Метод локализации отказавшего элемента (Лекция 8) Для локализации отказавшего элемента возможны несколько вариантов действий оператора: 1. Метод поэлементных проверок. 2. Метод средней точки (метод половинного деления). 3. Комбинированный. Рассмотрим их подробнее. Метод поэлементных проверок предусматривает проверку элементов по одному в определенной, заранее заданной, последовательности. Каждая проверка имеет два исхода, либо элемент исправен, либо нет (0 и 1). Выясним, в какой последовательности следует проверять элементы, чтобы удовлетворить принципу (16). В качестве примера рассмотрим систему, состоящую из N последовательно соединенных элементов (рисунок 3 ). Так как в дорожных, строительных машинах, а также машинах транспортного строительства резервирование практически не используется (т.е. отказ любого аппарата есть отказ системы), то допущение о последовательном характере соединения справедливо. Р1 Р2 Р3 Рисунок 3 – Диагностируемая система РN Будем полагать, что нам известны вероятности отказа для каждого элемента Pi; время каждой проверки ti; и стоимость каждой проверки ci. Допустим, что для одного из элементов значение оставшихся и Pi = 0,5. Тогда для любого элемента из всех Pi< 0,5. Для простоты будем полагать, что t1 = t2 = ... = tn c1 = c2= ....= cn . В этом случае принцип максимального критерия (16) вырождается в принцип получения максимума информации на каждом этапе (за каждую очередную проверку). Максимум информации будет получен при проверке элемента, для которого Pi = 0,5. Проверка любого другого элемента дала бы меньше информации (это вытекает из свойств энтропии). В графической форме зависимость энтропии испытания (а следовательно, и информации, получаемой в ходе проверки) с двумя исходами (исправно, неисправно) от значений вероятности исходов Pi и (1- Pi ) приведена на рисунке 4 . График построен в соответствии с формулой : Н = - [Pilog2Pi + (1-Pi)log2(1-Pi)] , (5) где Pi – вероятность отказа проверяемого элемента (или коэффициент отказа); (1-Pi ) – суммарная вероятность отказа всех непроверенных элементов, т.е. всех, кроме i-того. График, изображенный на рисунке 4, будет аналогичен графику для простейшей системы, состоящей из двух элементов (N= 2). Дело в том, что любая система может быть представлена в виде простейшей: i-того проверяемого элемента и совокупности всех остальных, как некоторого целого. Поэтому энтропия проверки не будет отличаться от энтропии состояния простейшей системы. На втором этапе проверяется элемент, у которого значение вероятности отказа Pi (или коэффициента отказа βi, bi) имеет наибольшее значение по сравнению с другими еще непроверенными элементами, т.к. в этом случае информации будет получено больше (как следует из рисунка 3). Зависимость энтропии испытания (проверки) от значений вероятности исхода испытанй 1 Энтропия системы, Н 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 Вероятность отказа элемента, Р Рисунок 4 – Зависимость энтропии испытания (проверки) от значений вероятности исхода испытаний На третьем этапе проверяется элемент с наибольшим значением Pi среди еще не проверявшихся и т.д. Возможен и другой вариант действий. Если первая проверка не привела к локализации отказа, то вероятность того, что неисправный элемент находится среди еще не проверявшихся, равна 1. Определив новые значения вероятностей отказа для элементов группы значением близким N1 (N1 = N-j) и выбрав среди них элемент со к 0,5, мы получим максимум информации на каждом очередном этапе диагностирования. Данная методика и ее вариант эффективны в том случае, когда вероятность отказа любого элемента системы меньше 0,5, только в этом случае на первом этапе не будет получен максимум информации. Однако, начиная проверку с элемента, значение Pi для которого близко к 0,5, получим на первом этапе больше информации, чем в любом другом случае. Рассмотрим теперь вариант, когда среди элемент, у которого Pi близко к 0,5, например, N элементов системы имеется Pi = 0,8. Если система состоит всего из двух элементов (N =2), то второй элемент имеет значение вероятность отказа Pi = 0,2, и тогда безразлично какой из элементов проверять первым, т.к. в том и в другом случае будет получено одинаковое количество информации (согласно рисунку 3). Любая из проверок решает задачу о состоянии этих элементов. Если число элементов системы N > 2 и вероятность отказа одного из них равна 0,8, то ни для какого другого элемента значение Pi не будет равно 0,2, а следовательно, любая другая проверка дает меньше информации, чем проверка элемента с вероятностью отказа Pi = 0,8. Рассуждение, очевидно, справедливо и для других случаев, когда для одного из элементов Pi> 0,5. Можно сделать вывод: если и t1 = t2 =... ti c1 = c2 = ....ci , то проверять элементы целесообразно в последовательности P1 → P2 → ......→ Pi, что соответствует принципу максимального критерия (4). Если P1 = P2 =...= Pi , то на первый взгляд последовательность проверок безразлична, и проверку можно начинать с любого элемента. Однако это не так. В случае, когда вероятности отказа примерно равны, наиболее выгодной является стратегия поиска, основанная на методике средней точки (метод половинного деления). Пусть количество элементов в системе равняется диагностирования можно рассматривать как опыт неисправного элемента и который может иметь В N считать равновероятными. Тогда энтропия опыта N . В этом случае процесс , состоящий в выявлении исходов. Все исходы будем В H(B) (т.е. требуемая информация, другими словами) H(B) =log2N. Рассмотрим теперь сложный опыт An , заключающийся в том, что мы будем последовательно проверять элементы от первого до совершим n операций): N -ого (иначе говоря An = a1·a2·a3.......an. Энтропия первой диагностической операции – первого опыта превосходит одного бита, т.к. неисправен, не может иметь два исхода (либо элемент N1 либо нет). Энтропия опыта стороны, информация An a1 a1 An не превосходит n бит. С другой I(An ;B) относительно опыта B , содержащаяся в опыте не может превосходить полной информации, содержащейся в энтропии последнего опыта - энтропии полностью исход H(An). Для того чтобы исход опыта An определял B, необходимо, чтобы имело место равенство I(An ;B) = H(B). В этом случае имеем log2 N = H(B)= I(An ;B)≤ H(An) ≤ n, другими словами, n ≥ log2 N . Необходимо иметь в виду, что n может быть только целым числом. Для того чтобы отыскать неисправный элемент с наименьшим количеством операций, нужно добиваться, чтобы информация, содержащаяся в каждой проверке (каждом опыте), была максимальной. Чтобы энтропия опыта H(ai) была равна одному биту, необходимо, чтобы оба исхода опыта равновероятны. Далее необходимо, чтобы информация опыта B, заключенная в I(ai ;B) ai ai – были относительно ai, равнялась энтропии опыта H(ai) опыта ai , а не была бы меньше ее. Для этого надо, чтобы результат проверки не содержал "посторонней" информации, т.е. чтобы условная энтропия HВ(ai) равнялась нулю (иначе говоря, исход опыта B должен полностью определять исход ai ). Эти соображения указывают, как следует повести первую проверку. Разобьем группу элементов N на две равные по численности части (если все отказы равно- вероятны), чтобы исходы опыта были также равновероятны. Если отказы a1 элементов неравновероятны, то разбиение следует проводить таким образом, чтобы вероятности отказов каждой группы были примерно равны, т.е. P(N1) ≈P(N2) ; N1 +N2 =N. Выясним, к какой группе относится отказавший элемент. Очевидно, в этом случае I(ai ;B) = H(B) - I(ai ;B) = 1, I(ai ;B) = p(α1)Hα1(B) + p(α2)Hα2(B) = H(B) -1, где α1; α2 - исходы опыта ai ; p(α1); p(α2) - вероятности исхода опыта ai ; p(α1) ≈p(α2)≈0,5. Кроме того, Hα1(B) = Hα2(B) = H(B) -1, так что при любом исходе проверки ai энтропия интересующего нас опыта В уменьшится на 1 бит. Далее следует разбить новое множество элементов на две возможно близкие по численности части N2 = N3 + N4 и выяснить, к какой из них относится отказавший элемент. Если возникает ситуация, когда N нечетно, то мы уже не можем добиться строгой равновероятности исходов опыта ai , однако и в этом случае данная стратегия поиска является близкой к оптимальной. Наименьшее число проверок n, позволяющее отыскать неисправный элемент в гидросистеме из N элементов определяется неравенством n- 1< log2 N ≤ n или независимо от значения N всегда n ≥ log2 N. 2n-1< log2 N ≤ 2n, (6) При этом n = log2 N следовательно, log2 N , когда есть целое число. При весьма больших значениях разница между числами n больших log2 N и величина N является целой степенью числа 2, и, N и N оказывается весьма невелика (т.к. при log2 N велика, а разность n – log2 N всегда не превосходит единицы). Покажем на примере, что описанная стратегия поиска отказа в гидросистеме является более выгодной с точки зрения количества проверок (в среднем), чем просто перебор возможных вариантов. Условимся считать, что Р1=P2= .....Pi; t1 = t2 =.....ti; c1 =c2=.....ci. В этом случае в качестве критерия эффективности поиска рационально принять количество тест-проверок. Пусть N равняется 10. Очевидно, при простом переборе мы будем в общем случае иметь N n1 или, так как n целое число, то i 1 i 1 N 4,5 n1 =5, то есть в среднем потребуется столько проверок для обнаружения отказавшего элемента. Используя метод средней точки, имеем n2 = log2 N = 3,32, иначе говоря, n2 = 4, т.к. n2 – целое число. Окончательно имеем Если отказы n2 < n1, что и требовалось доказать. неравновероятны, но довольно близки, то разбиение производится таким образом, чтобы вероятности отказа каждой подгруппы были возможно более близки к 0,5 и т.д. В этом случае мы получаем максимум возможной информации за каждую очередную проверку (около одного бита). Комбинированный метод поиска представляет собой комбинацию описанных выше методов и может применяться в том случае, когда среди элементов системы имеется один или несколько, где вероятность отказа (или коэффициента отказа) значительно выше, чем у остальных. Если имеется весьма большая вероятность того, что i -тый элемент является неисправным (например, если Pi =0,5, а все остальные значения менее 0,1), то, очевидно, есть смысл проверить, прежде всего элемент i, несмотря на то, что в случае отрицательного результата (в том смысле, что отказ не будет найден) мы затрачиваем время на проверку с весьма малой п пользой, т.к. количество возможных уменьшится только на единицу. В дальнейшем же целесообразно применить метод средней точки. Если среди подгруппы N1, определенной методом средней точки, вновь обнаруживается элемент, вероятность отказа которого намного больше, чем всеx остальных, то он вновь проверяется в первую очередь и т.д. Количество проверок п для группы машин можно определять по формуле n3 ≥ Pj + [1+log2 (N-1)](1-Pj ) (7) Справедливость формулы (20) базируется на следующем рассуждении: вероятность того, что неисправность среди тестирования элемента j, N элементов будет обнаружена путем для группы машин равняется Pj . И в этом случае нам достаточно одной проверки. Далее, вероятность того, что неисправный элемент относится к остальным элементам, равна одной машины будет Pj ). 1+log2 (N-1), 1- Pj . Тогда количество проверок для а для группы машин [1+log2 (N-1)](1- Среднее количество проверок для группы машин определится, очевидно, по формуле (2.20). Комбинированная стратегия несколько более выгода, чем чисто взятый метод средней точки, тем более, что в половине случаев отказавший элемент обнаруживается при первой же проверке. Можно определить, при каком значении Pj становится комбинированная стратегия. Для этого приравняем выражения (7) и (6). Имеем log2 N = Pj + [1+log2 (N-1)](1-Pj ). выгодной Отсюда Pj 1 log 2 ( N 1) log 2 N log 2 N . (8) Графическая интерпретация формулы (8) показана на рисунке 5. Функция Pj =f(N) очевидно, дискретна, т.к. n может быть только целым числом. Из графика, в частности, следует, что при N ≥ 20 (довольно распро- страненный случай для грузоподъемных, строительных и дорожных машин) значение вероятности, при которой становится выгодна комбинированная Априорная вероятность отказа элемента стратегия поиска, лежит в диапазоне значений 0,2≤ Оптимизация стратегии поиска отказа Pj ≤ 0<5. 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Количество элементов в подсистеме Граница перехода от метода поэлементных проверок к методу средней точки при поиске отказа Рисунок 5 – Оптимизация стратегии поиска отказа Если при оценке вероятности отказов (экспертным или статистическим, или каким-либо другим методом) ни одна оценка не превышает значения 0,2 (при N ≥ 20 ), то поиск отказа целесообразно вести методом средней точки. 5. Разработка блок-схемы алгоритма диагностирования (Лекция 9 ) В самом общем виде этапы процесса диагностирования сложных систем представлены на рисунке 1. Рассмотренный материал, однако, дает возможность разработать более подробно блок-схему алгоритма диагностирования сложных гидросистем. После того, как проанализированы признаки нормального функционирования системы, и оператор приходит к выводу о наличии отказа в системе, возможны два варианта дальнейших действий: 1. Структурный анализ системы и определение подгруппы, содержащий отказавший элемент (см. п. 5) 2. Непосредственный анализ вероятностей отказа элементов. Первый путь является наиболее выгодным, но требует высокой квалификации оператора. Затем выбирается критерий эффективности поиска, и определяется программа проверок, по которой локализуется отказ в системе. Структурная схема алгоритма диагностирования представлена на рисунке 7. Выше отмечалось, что алгоритм поиска может быть жестким или гибким. Жесткая процедура поиска, охватывающего всю гидросистему вполне приемлема в условиях завода-изготовителя при тестировании собранной системы, и в условиях эксплуатации при проведении планового технического обслуживания. Для некоторых машин с высоким нормативным коэффициентом готовности (например, работающих в "окно" на железных дорогах) такое обслуживание желательно производить перед каждым выходом на перегон. Жесткий алгоритм разрабатывается заранее и информация, полученная на каждом предыдущем этапе, практически не используется на последующих. Тестирование в этом случае не требует наличия априорной информации о состоянии системы (имеется в виду оперативная информация об отказах системы). Гибкий алгоритм поиска отказа использует как минимум вероятностную информацию, которая также является априорной. При стратегии, оптимальной по выбранному критерию, формированию групп и последовательности тестов для локализации отказа возможности дальнейшего сокращения времени поиска практически исчерпываются. Дальнейшее совершенствования продвижение может диагностической быть достигнуто аппаратуры, лишь повышения за счет контроле- пригодности систем, в частности создания бортовых систем и автоматизации процессов диагностирования. Принципиально возможно увеличение скорости поступления информации за счет уменьшения энтропии до начала испытаний, например, за счет логического анализа и симптомов отказа. Таким образом, в целом гибкий алгоритм является предпочтительным, но требует высокой квалификации оператора. Проверка ПНФ гидросистемы Система исправна Конец Система неисправна Анализ симптомов отказа и ПНФ системы Анализ структуры и разбиение на группы Преобразование групп Определение группы с отказавшим элементом Определение логических связей Ввод вероятности отказа элементов (коэффициентов отказа) Определение энтропии группы (системы) Выбор критерия поиска отказа Количество тест-проверок Информативность проверок Скорость поступления информации Стоимость проверок Затраты времени на поиск отказа Обобщенный критерий Определение программы проверок Поэлементный метод Метод средней точки Комбинированный Локализация отказа Рисунок 6 – Блок- схема гибкого алгоритма диагностирования гидросистем