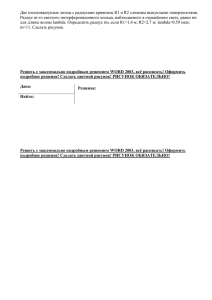
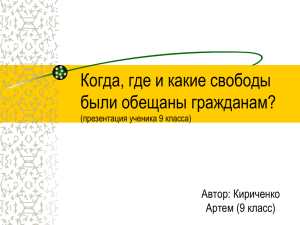
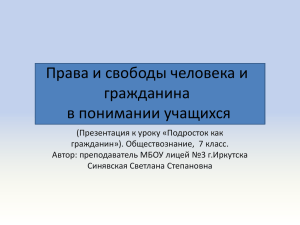
Тема 1 Кинематический анализ сооружений Лекция 1.1 Понятие о расчетной схеме сооружения. Кинематический анализ сооружений Проведение составлением любого его расчёта расчётной сооружения схемы с необходимо последующим предварять выполнением кинематического анализа. Расчётная схема – это упрощённое изображение реального сооружения. При переходе от реального объекта к расчётной схеме происходит идеализация нагрузки, связей и свойств материала, т.е. игнорируются второстепенные факторы, не оказывающие существенного влияния на расчёт. Переход от реального сооружения к его расчетной схеме является достаточно сложной и ответственной задачей. Выбранная расчетная схема должна отражать все основные особенности сооружения. Неверно подобранная расчетная схема может привести к неправильным результатам. Для одного и того же сооружения можно выбирать разные расчетные схемы. Выбор рационально выбранной расчетной схемы приводит к сокращению вычислений и точности результатов расчета. Расчетные схемы сооружений можно классифицировать по-разному: плоские и пространственные расчетные схемы, расчетные схемы по типу или способу соединения элементов, по направлению опорных реакций, по статическим и динамическим особенностям и т.д. Различают следующие расчетные схемы простых сооружений: балка, ферма, рама, арка и др. 1. Балка представляет собой изгибаемый брус. Балки бывают однопролетными или многопролетными. Виды однопролетных балок: простая шарнирно опертая балка (рис. 1.1 а), консольная балка (рис. 1.1 б) и балка с консолями (рис. 1.1 в). Виды многопролетных балок: разрезные (рис. 1.1 г) и неразрезные (рис. 1.1 д). Рисунок 1.1 2. Рама – система, состоящая из стержневых элементов (прямых или ломаных). Стержни в раме могут соединяться жестко или шарнирно. Некоторые типы рам: простая рама (рис. 1.2 а), трехшарнирная рама (рис. 1.2 б), многоэтажная рама (рис. 1.2 в), рама с затяжкой (рис. 1.2 д). Рисунок 1.2 3. Ферма – стержневая система, остающаяся геометрически неизменяемой после замены её жёстких узлов шарнирными, Типов ферм много, более подробно классификация ферм будет рассмотрена в теме статически определимые фермы Некоторые виды ферм: мостовая ферма (рис. 1.3а), стропильная ферма (рис. 1.3б), крановая ферма (рис. 1.3в), башенная ферма (рис. 1.3г). Рисунок 1.3 4. Арка – система из кривых стержней. На рисунке 1.4 приведены некоторые типы арок: трехшарнирная (рис. 1.4 а), двухшарнирная (рис. 1.4 б), арочная ферма (рис. 1.4 в, бесшарнирная (рис. 1.4 г). Рисунок 1.4 Существуют более сложные системы как комбинации простых систем. Они называются комбинированными системами. По статическим особенностям различают статически определимые и статически неопределимые расчетные схемы. Кинематический анализ расчётной схемы сооружения предназначен для выявления вопроса о том, является ли система геометрически неизменяемой, геометрически изменяемой или мгновенно изменяемой. Решение этого вопроса связано с установлением числа степеней свободы расчётной схемы, а также с анализом её геометрической структуры. Проведение кинематического анализа расчётной схемы требует введения таких понятий и определений, как стержневая система, степень свободы, диск, кинематическая связь, простой и сложный шарнир и др. Кинематический анализ – это исследование расчётной схемы сооружения (системы), выполняемое до начала расчёта, с целью определения кинематического качества системы (геометрической неизменяемости, мгновенной изменяемости или геометрической изменяемости), а в случае геометрической неизменяемости системы – также для выявления ее статической определимости или неопределимости. Кинематический анализ позволяет своевременно обнаружить системы, расчёт которых либо вообще невозможен методами механики деформируемых тел - геометрически изменяемые системы, либо может выполняться с использованием особых подходов - системы мгновенно изменяемые. Кроме того, в результате кинематического анализа выясняется, как именно предстоит рассчитывать систему – достаточно ли для определения усилий в системе одних только уравнений статики (в случае статически определимой системы) или необходимо рассматривать все три стороны задачи расчёта деформируемой системы - статическую, геометрическую и физическую (если система статически неопределимая). Сооружения должны быть геометрически неизменяемы, т.е. сохранять геометрическую форму, заданную при возведении. Геометрически неизменяемой системой (ГНС) называется такая система, изменение формы которой возможно лишь в связи с деформациями ее элементов. Простейшей геометрически неизменяемой системой является шарнирный треугольник (рисунок 1.5а). Геометрически изменяемой системой (ГИС) называется система, в которой возможны конечные перемещения без деформации элементов (рисунок 1.5б). Мгновенно изменяемой системой (МИС) называется система, в которой могут возникать бесконечно малые перемещения без деформации её элементов (рисунок 1.5в). Рисунок 1.5 Степени свободы – независимые геометрические параметры, полностью определяющие положение всех точек диска или системы в целом при их возможных перемещениях. Диск – часть системы (один или несколько соединённых друг с другом элементов), форма и размеры, которой могут изменяться только вследствие деформации материала. Простейшим диском является стержень. Так же диском является «земля», основание. На рисунке 1.6 представлены различные диски. Особым диском, который используется в кинематическом анализе, является диск «земля», представляющий собой единую модель всех реальных объектов, играющих роль основания для рассчитываемого сооружения, – фундаментов, других конструкций, поддерживающих рассматриваемую систему. Диск «земля» всегда считается неподвижным и недеформируемым (возможная деформация реального основания изначально закладывается в расчётную схему сооружения путем введения податливых опор). а, б, в, г, д – диски состоящие из одного элемента (а, б, в – стержни с прямолинейной, криволинейной и ломанной в плоскости или в пространстве осью; г – диск-пластинка; д – диск-оболочка); е, ж, з, и, к – диски состоящие из нескольких элементов (е, ж, з – из однотипных элементов – стержней, плоские (е, ж) и пространственный (з); и, к – комбинированные пластинчато- и оболочечностержневые, пространственные). Рисунок 1.6 Каждый несвязанный жесткий диск в плоскости имеет три степени свободы , т.е. его положение в плоскости определяется тремя независимыми координатами двумя поступательными перемещениями по направлению осей x и y, и поворотом в плоскости xy (рис 1.7 б). Несвязанный диск в пространстве имеет шесть степеней свободы: координаты x, y, z и углы поворотов в плоскости xy, xz, yz (рис. 1.7в). Точка в пространстве имеет три степени свободы – x, y и z , а в плоскости – две x и y (рис 1.7 а). Связи (механические) – ограничения на перемещения (линейные и/или угловые) точек или сечений элементов системы, а также устройства, технически реализующие эти ограничения. К таким связям относят шарниры и опоры. Рисунок 1.7 Каждая элементарная связь отнимает одну степень свободы. Каждый простой шарнир снимает две степени свободы взаимной подвижности связанных им дисков. Простой шарнир соединяет два диска (рисунок 1.8а). Сложный шарнир образуется при шарнирном соединении в одной точке более чем двух дисков (рисунок 1.8 б). Он эквивалентен (m-1) простому шарниру, где m - число соединяемых им дисков. На рисунке 1.8.б кратный шарнир можно заменить четырьмя одиночными шарнирами (соединены пять дисков). Рисунок 1.8 На рисунке 1.9 изображены различные схемы опирания (опоры): шарнирноподвижные опоры (а, б, в); шарнирно-неподвижные опоры (г, д, е, ж); жесткая заделка или защемляющая связь (з); скользящая заделка (и). Шарнирноподвижная опора эквивалентна одной связи и дает одну опорную реакцию. Шарнирно-неподвижная опора эквивалентна двум связям и дает две опорных реакции. Жесткая заделка или защемляющая связь эквивалентна трем связям и дает три опорные реакции. Скользящая заделка эквивалентна двум связям и дает две опорных реакции. Рисунок 1.9 Согласно выше сказанному можно сделать вывод, что степень свободы системы будет определяться по формуле 1.1. 𝑊 = 3𝐷 − 2Ш − Соп (1.1) Для системы, изображенной на рисунке 1.10а – степень свободы W=1 (D=3, Ш=2, Соп=4), на рисунке 1.10б – степень свободы W=0 (D=9, Ш=12, Соп=3), на рисунке 1.10в – степень свободы W=-3 (D=1, Ш=0, Соп=6). Рисунок 1.10 При определении степени свободы системы возможны три качественно различных результата: 1. 𝑊 < 0 – система геометрически неизменяема и статически неопределима; 2. 𝑊 = 0 – система геометрически неизменяема и статически определима; 3. 𝑊 > 0 – система геометрически изменяема, является механизмом и ее нельзя использовать в качестве сооружения. Кинематический анализ сооружения включает в себя, не только количественный анализ системы, но и качественный (структурный) анализ системы. Количественный анализ системы – это исследование расчётной схемы сооружения, заключающееся в оценке соотношения суммарного числа степеней свободы дисков системы, до наложения на них внешних и внутренних связей (т.е. несвязанных дисков) и суммарного числа внешних и внутренних связей системы. Условие W≤0 является необходимым, но недостаточным для геометрической неизменяемости системы. Для обеспечения геометрической неизменяемости системы должно выполняться необходимое и достаточное условие. Достаточным условием является правильное формирование структурно-неизменяемой системы, это и есть качественный анализ системы. Для этого существуют основные принципы структурообразования геометрически неизменяемых систем: 1. Присоединение к диску двух стержневого звена не изменит степени свободы системы (рисунок 1.11а); 2. К диску можно геометрически неизменяемо присоединить другой диск с помощью общего для обоих диска шарнира и стержня, направление которого не должно проходить через этот шарнир (рисунок 1.11б); 3. Три диска можно соединить тремя шарнирами, не лежащими на одной прямой (рисунок 1.11в); 4. Два диска образуют геометрически неизменяемую систему, если они связаны между собой с помощью трех стержней, оси которых не пересекаются в одной точке и не параллельны друг другу (рисунок 1.11г). Итак, утверждать что система геометрически неизменяема можно только, если выполнены неизменяемости. необходимое и достаточное условие геометрической Рисунок 1.11 Итак, утверждать что система геометрически неизменяема можно только, если выполнены необходимое и достаточное условие геометрической неизменяемости. Пример 1.1 Провести кинематический анализ заданной системы Решение: 1. Проверим необходимое условие геометрической неизменяемости, т .е проведем количественный анализ. Данная система представляет собой два диска (диск D и диск «земля») соединенные тремя опорными стержнями. Таким образом, диски – Д=2, шарниры – Ш= 3, опорные связи – Соп=3 𝑊 = 3𝐷 − 2Ш − Соп = 3 ∗ 2 − 2 ∗ 3 − 3 = 0 Т.к. W=0, т.е. выполнено необходимое условие геометрической неизменяемости, и можно предположить, что система геометрически неизменяема. 2. Проведем количественный анализ системы. Т.к. система представляет собой два диска (диск D и диск «земля») соединенные тремя опорными стержнями, которые параллельны друг другу, то данная система не может быть геометрически неизменяемой. Нарушен 4 принцип структурообразования геометрически неизменяемых систем: два диска образуют геометрически неизменяемую систему, если они связаны между собой с помощью трех стержней, оси которых не пересекаются в одной точке и не параллельны друг другу. При действии на такую систему боковой нагрузки, данная система имеет конечное перемещение без деформации элементов. Вывод: Система геометрически изменяема. Вопросы для самоконтроля 1. Что такое кинематический анализ? Его назначение? 2. Назовите основные понятия кинематического анализа, 3. Дайте определение диска. Что может быть диском? 4. Дайте определение связи. Как классифицируются связи? Перечислите типы связей плоских систем 5. Что такое степени свободы и какие величины могут выступать в качестве степеней свободы? Сколько степеней свободы имеет жёсткий диск и точка в пространстве и в плоскости? 6. Какие системы называются геометрически неизменяемыми, геометрически изменяемыми, мгновенно изменяемыми? 7. Назовите этапы кинематического анализа. Дайте определение количественного анализа. Что такое качественный ( структурный ) анализ? 8. Что такое W ? Как вычисляется эта характеристика? 9. Укажите, что означают качественно различные результаты при определении степени свободы системы (W)? 10.Перечислите типовые способы геометрически неизменяемого соединения дисков, объясните смысл каждого из них с указанием требований к расположению связей.