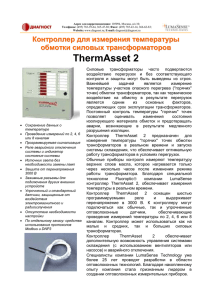
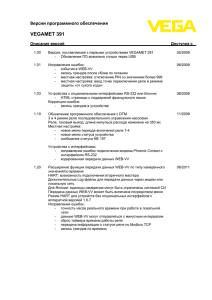
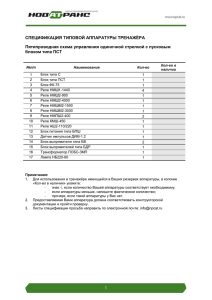
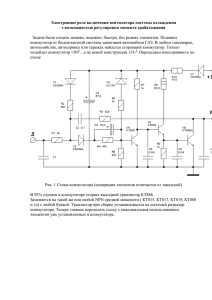
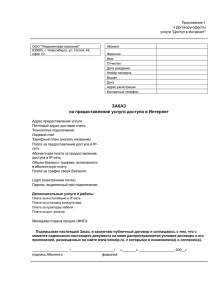
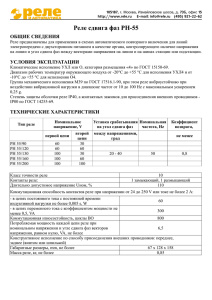
Структура системы МПЦ Ebilock 950. С точки зрения функционального назначения в данной МПЦ можно выделить четыре основных подсистемы: диалоговую; диагностики; логических зависимостей; управления и контроля состояния объектов. В состав диалоговой подсистемы входит автоматизированное рабочее место дежурного по станции (АРМ ДСП), основными функциями которого является: 1) 2) 3) 4) 5) отображения путевого развития станции с индикацией текущего состояния объектов контроля и управления; обработка команд ДСП; регистрация событий; обработка сигналов о неисправностях; отображения журнала событий и списка неисправностей. Подсистема диагностики в МПЦ представлена в виде терминала электромеханика (АРМ ШН), на который поступает информация о различных неисправностях в системе, например обрыве петли связи, перегорание лампы на светофоре, потеря контроля стрелки или понижение изоляции кабеля. Пользовательские интерфейсы и общие принципы построения АРМ ДСП и АРМ ШН во многом схожи. Между АРМами установлена граница зоны ответственности, с АРМа ШН невозможно управления станцией, механику доступен только режим наблюдателя, с расширенными возможностями анализа и контроля событий, А так же использование прикладных программ MultiRcosPlayback и FeuSurf, для расследования случаев отказа и контроля работоспособности системы в целом. Реализация логических взаимозависимостей между станционными объектами в соответствии с требованиями безопасности движения поездов осуществляется на уровне подсистемы логических зависимостей. Технической основой этого подуровня МПЦ является центральный процессор, структура аппаратного и программного обеспечения которого обеспечивает заданные параметры безотказности и безопасности. Ядром системы является компьютер централизации ( К Ц ) который проверяет все условия для безопасного движения поездов и с помощью системы объектных контроллеров управляет станционными объектами. Аппаратная компоновка КЦ приведена на рис 1 . КЦ состоит из модулей установленных в 19 дюймовый блок, содержащую пассивную объединительную плату для межмодульной связи и распределения питания. КЦ занимает как левую, так и правую половины корпуса. PSM DEM CPM IOM IOM IOM IOM CPM DEM PSM P1 +5V +12V -12V RUN ONL SRV ERR RUN ONL SRV ERR RST RST SERV АUX2 SERV АUX2 +5V +12V -12V P2 ETH ETH SCSI P3 SCSI P4 АUX1 АUX1 POWER S1 S2 POWER S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 S13 P5 S14 Рис 1. Внешний вид процессорного модуля централизации Модули устанавливаются парами, что соответствует основному и резервному комплекту. В состав процессорного блока входят следующие модули: • питания (РSМ); • дисковый и сетевой (DЕМ); • центрального процессора (СРМ); • ввода-вывода (IOМ). Модуль питания формирует напряжения для функционирования ПМЦ: +5 В/10 А; +12 В/30 А; -12 В/0,5 А, а также обеспечивает защиту от короткого замыкания, индикацию пропадания выходного напряжения, сохранение в течение 30 мс выходного напряжения при пропадании входного. Дисковый и сетевой модуль состоит из двух отдельных подсистем: сетевого интерфейса и жесткого диска. Подсистема сетевого интерфейса предназначена для подключения КЦ к различным внешним устройствам, например к АРМ ШН, а на этапе разработки — к общей сети предприятия. Разъем может также использоваться для подключения к системе АРМ ДСП. Подсистема жесткого диска содержит SCSI-контроллер, внутренний жесткий диск и внешний SCSI-разъем, к которому можно подключить до пяти различных SCSIсовместимых устройств, например жесткие диски, СD-устройства и ленточные накопители. Модуль ввода-вывода обеспечивает связь с объектными контроллерами. Для этого в состав каждой платы входят: COS порт (RS232); Для непосредственного контроля и управления станционными объектами (стрелками, светофорами, рельсовыми цепями переездами и т.д) служит система объектных контроллеров. Система объектных контроллеров Система объектных контроллеров (СОК 950) является частью микропроцессорной централизации Ebilock 950. Каждый объектный контроллер может управлять и контролировать один или несколько напольных объектов в зависимости от их типа, используя для этого микропроцессор со специальной программой. Объектный котроллер – устройство, осуществляющее контроль и упражнение специфичным напольным оборудованием. Объектные контроллеры от концентратора принимают приказы, передаваемые компьютером централизации, и преобразуют их в электрические сигналы для управления напольными устройствами. Аналогичным образом сигналы, принятые от напольного оборудования, преобразуются в телеграммы его состояния и через концентраторы передаются в компьютер централизации, Отказы в объектном контроллере приводят к изоляции соответствующего подключенного напольного оборудования, При этом данная ситуация обрабатывается безопасным образом. В системе Ebilock 950 различаю следующие типы объектных контроллеров: Сигнальный объектный контроллер позволяет включить в централизацию поездные и маневровые сигналы, применяемые на ж.д., а также, позволяет получит информацию о состоянии контактов реле , при помощи безопасных контактных входов. Он контролирует состояние сигналов, управляет ими и служит интерфейсом между центральным компьютером и напольными объектами. В зависимости от того, какое показание необходимо обеспечить на данном сигнале к ОК могут быть посланы различные приказы, и зажигающие соответствующие данному приказу лампы на сигнале. Сигнальный объектный контроллер может состоять из платы ССМ и одной, либо двух плат LMP. Стрелочный объектный контроллер выполняет функции: определение состояния стрелки (левое, правое, потеря контроля, взрез), управление электродвигателем стрелочного электропривода в соответствии с командами КЦ при централизованном управлении или состоянии кнопок местного управления в соответствующем режиме, контроль состояния стрелочных замков. Так же стрелочный объектный контроллер позволяет получить информацию о состоянии контактов, подключенных к платам ССМ и MOT1 данного контроллера. Стрелочный объектный контроллер может состоять из платы ССМ и одной, либо двух плат МОТ1. Релейный объектный контроллер позволяет включить в централизацию различные реле, применяемые на ж.д., а также позволяет получить информацию о состоянии контактов реле, при помощи безопасных контактных входов. Он позволяет ставить под ток и обесточивать реле, в зависимости от приказа дежурного по станции, а так же служит интерфейсом между центральным компьютером и напольными объектами (реле). Релейный объектный контроллер может состоять из одной платы ССМ, а так же из одной платы ССМ, одной двух или трех плат SRC. Объектный контроллер не неответственного ввода/вывода обеспечивает управление выходным напряжением для схем и устройств, не предъявляющих специальных требований по безопасности. Типичными примерами различного применения этого тина котроллеров является построение систем обогрева и обдува стрелок. Таким образом, в зависимости от контролируемых и управляемых объектов электрической централизации, объектный контроллер будет укомплектован следующими платами. Плата ССМ. Безопасным процессорным ядром для каждого объектного контроллера является плата Контроллера и Проверки Контактов (СCМ), которая построена на основе микроконтроллера. Плата ССМ содержит четыре канала безопасной проверки состояния контактов (на пример для определения состояния путевых реле), шесть не ответственных выходов, и два не ответственных входа. Плата СОМ. Плата Связи и Модемов (СОМ) управляет внешними связевыми интерфейсами: модемное соединение с петлей связи с CIS, однонаправленный интерфейс RS-232 для подключения анализатора протокола и двунаправленный интерфейс RS-232 для подключения оборудования РСМ модуляции или персонального компьютера для целей диагностики работы системы. Каждая плата СОМ оборудована выключателем питания. Две платы СОМ вместе с платой ОСТ образуют CCU. Плата LMP. Плата Управления Лампами (LMP) используется для управления светофорами и световыми индикаторами. Один объектный контроллер может управлять двенадцатью нитями ламп, как максимум, сгруппированных в шесть независимых физических объектов (используется одна плата ССМ и две платы LMP). Каждая плата LMP содержит два специализированных выхода для управления стоповыми огнями и четыре выхода для управления разрешающими огнями. Плата МОТ1. Плата Управления Мотором типа 1 ( M ОТ 1 ) используется для управления моторами стрелочных приводов переменною тока. Один объектный контроллер может управлять одиночной стрелкой использующей до четырех приводов (одна плата ССМ и одна плата M OT1 ) или с п а р е н н ы м и стрелками, содержащими до двух приводов каждая (одна плата ССМ и две платы М О Т1 ) . Приведенные данные основываются на предположении, что механизм выключения является частью стрелочного привода и электрическая нагрузка находится внутри предопределенного диапазона. В противном случае, емкость по управлению уменьшается на половину или даже более, в зависимости от характеристик нагрузки. Плата ОСТ. Плата Распределения Питания (ОСТ), обеспечивает распределение питания (24 В постоянного тока), поступающего от источника питания для всех объектных контроллеров установленных в одной полке. Две платы ОСТ могут быть соединены между собой для обеспечения расширения канала связи концентратор – объектные контроллеры, что обеспечит подключение к одному концентратору до восьми объектных контроллеров, установленных в двух полках. Каждая плата ОСТ имеет четыре выключателя питания, которые предназначены для включения питания соответствующих объектных контроллеров, установленных в данной полке. Данные выключатели используются в процессе обслуживания системы. Плата SRC. Плата Безопасного Управления Реле (SRC) обеспечивает активацию/отключение реле безопасным образом. Один объектный контроллер может управлять 12 выходами, как максимум (одна плата ССМ и три платы SRC), п р и этом каждая плата SRC содержит 4 выхода. Типичным примером использования плат SRC является построение интерфейсов с существующими релейными системами типа автоблокировки или переездной сигнализации. Подсистема логических зависимостей Подсистема диагностики Диалоговая подсистема Компьютер централизации Рабочее место дежурного электромеханника Автоматизированное рабочее место дежурного по станции Концентраторы 1 1 2 2 8 15 Объектные контроллеры Станционные объекты Подсистема управления и контроля состояния объектов Рис. 2. Структурная схема МПЦ Ebilock-950 ON Платанастройки 1 2 3 4 5 6 ON 1 2 3 4 5 6 43 42 41 40 39 38 P2 21 20 19 18 17 16 9 30 1 22 P2 61 32 3 24 26 7 Платанастройки ON 1 2 3 4 5 6 В ...К..-37 В ...К..-38 В ... ... Реле 43 42 41 40 39 38 P2 21 20 19 18 17 16 5 61 32 15 P2 1 1 .. К..-2 FU-6,3 51-424 MOT1 2 36 В ...К..-40 В ... ... ...К..-41 В Реле Реле ...К..-42 . В ...К..-4 Н ...К..-5 Н ...К..-6 Н ...К..-7 Н ...К..-14 В ...К..-15 В ...К..-16 В ...К..-17 В 6 ... ... Реле ... ... ... ... - .. К..-3 FU-6,3 Н ...К..-8 19 15 P4 24 31 21 61 42 32 22 12 43 33 23 13 44 34 24 14 + 45 35 25 15 46 36 26 16 ...К..-9 41 2 41 34 26 2 БДР 13 35 P4 4 . . Л7 Л6 Л5 Л4 Реле ... . . . ... 13 28 2 .. .. ...К..-49 30 .. К..-1 FU-6,3 .. .. 9 1 Реле .. Тип жгута 3NSS0034400011 28 ON В ...К..-36 .. 51-420 CCM 1 2 3 4 5 6 ...К..-35 Н ...К..-10 Л3 37 21 ...К..-11 61 3 17 ...К..-13 Л1 Н ...К..-12 33 БК 4 2 1 Тип жгута 3NSS0034450011 МСТ БК Л2 43 Электропривод стрелки 13 39 28 26 7 Платанастройки 1 2 3 4 5 6 1 2 3 4 5 6 ON ON 43 42 41 40 39 38 P2 21 20 19 18 17 16 5 61 32 15 P2 36 ...К..-22 Н ...К..-23 Н Л7 Л6 Л5 ...К..-24 Н Л4 ...К..-21 Н ...К..-31 В ...К..-32 В ... ...К..-33 В Реле ...К..-34 В ... ... Реле ... ... ... 9 - 30 .. К..-18 FU-6,3 1 .. К..-19 FU-6,3 1 1 .. К..-20 FU-6,3 51-431 MOT1 2 28 2 19 2 24 Н ...К..-25 + 15 P4 31 21 61 42 32 22 12 43 33 23 13 44 34 24 14 45 35 25 15 46 36 26 16 ...К..-26 41 26 2 41 34 35 P4 4 БДР 13 13 6 ... ... Н ...К..-27 Л3 37 21 61 3 Н ...К..-29 Л1 1 33 17 39 ...К..-30 Тип жгута 3NSS0034450011 Схема подключения стрелочного ОК. МСТ БК Л2 ...К..-28 43 БК 4 2 Электропривод стрелки .. Плата настройки 9 43 42 41 40 39 38 P2 21 20 19 18 17 16 ON 1 2 3 4 5 6 ON 1 2 3 4 5 6 30 1 64К22-22 В 64К22-23 В 64К22-24 В 64К22-25 22 В ... ... Реле ... Реле ... ... ... ... ... 11 32 3 24 В 64К22-27 В 64К22-28 В 64К22-29 В ... ... Реле ... Реле ... ... ... ... P2 64-256 CCM 64К22-26 13 34 5 64К22-30 В 64К22-31 В 64К22-32 В 64К22-33 26 В ... ... ... Реле ... Реле ... ... ... ... 64К22-34 15 36 7 64К22-35 В 64К22-36 В 64К22-37 28 В ... Плата настройки 1 2 3 4 5 6 ON 1 2 3 4 5 6 1 К22-1 FU-2 2 1 К22-2 FU-2 2 20 64-260 LMP P4 34 Реле ... ... ... ... ... Н К 1 4 64К22-7 Н РК 2 1 3 3 64К22-8 Н ОК 2 4 64К22-9 Н 1Ж 1 4 2 1 3 3 2 4 1 4 2 3 64К22-5 42 43 42 41 40 39 38 P2 21 20 19 18 17 16 ... Реле ... Тип жгута 11 ON ... В 64К22-6 39 18 37 64К22-10 15 13 64К22-11 Н Р1Ж 64К22-12 Н О1Ж 64К22-16 Н Б Тип жгута 22 32 10 10 31 6 К22-3 К22-4 27 P2 29 8 8 29 Плата настройки 42 1 1 2 3 4 5 6 1 2 3 4 5 6 ON ON К22-13 FU-2 2 43 42 41 40 39 38 P2 21 20 19 18 17 16 20 64-265 LMP P4 34 64К22-17 39 A9 18 Н 2Ж 1 4 64К22-20 Н Р2Ж 2 1 3 3 64К22-21 Н ОБ2Ж 2 4 64К22-18 37 64К22-19 15 13 Светофор Н 32 10 К22-14 К22-15 6 27 A3/A4 10 31 Тип жгута 23 P2 29 A1/A2 8 8 AA/AB 29 A9 Светофор Н Тр-ры СТ-5 Лампы ЖЛС12-25+25 Схема подключения сигнального ОК.