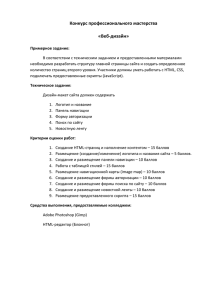
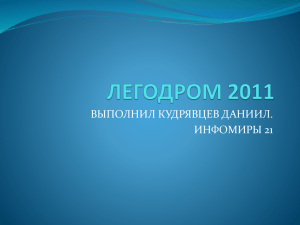
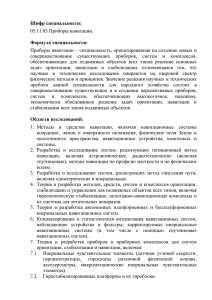
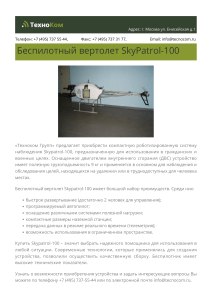
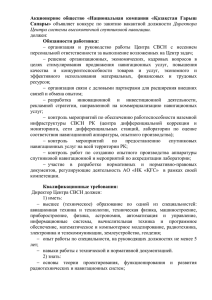
Вовк В.И., Липин А.В., Сарайский Ю.Н. Зональная навигация МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ГОСУДАРСТВЕННАЯ СЛУЖБА ГРАЖДАНСКОЙ АВИАЦИИ АКАДЕМИЯ ГРАЖДАНСКОЙ АВИАЦИИ Вовк В.И., Липин А.В., Сарайский Ю.Н. Зональная навигация Учебное пособие Санкт-Петербург 2004 Ш В71(03) УДК 629.7.052.001 (0.75.3) Вовк В.И., Липин А.В., Сарайский Ю.Н. ЗОНАЛЬНАЯ НАВИГАЦИЯ. Учебное пособие Издание второе, исправленное Утверждено Учебно-методическим объединением качестве учебного пособия для вузов гражданской авиации по образованию в области аэронавигации в Рекомендовано Департаментом летных стандартов Государственной службы гражданской авиации Министерства транспорта России для подготовки к полетам с применением точной зональной навигации (P-RNAV) Рецензенты Костылев А.Г., Сафро Б.Д. Изложены принципы зональной навигации (RNAV) и основные положения по выполнению полетов в регионах, где применяются требования к RNA V. Рассмотрены вопросы, касающиеся требуемых навигационных характеристик (RNP) и осуществления точной зональной навигации (РRNAV). Содержит рекомендации по подготовке воздушных судов и эксплуатантов гражданской авиации России к полетам в системе P-RNAV в Европейском регионе. В Приложении приведены необходимые нормативные материалы, содержащие вопросы зональной навигации. Учебное пособие предназначено для студентов, обучающихся по специальностям «Летная эксплуатация воздушных судов» и «Аэронавигационное обслуживание». Может быть использовано членами летных экипажей и персоналом органов ОВД. Ничто из данной документации не может быть скопировано, перефотографировано или перенесено на какой-либо электронный носитель или машиночитаемую форму без предварительного письменного разрешения издателя. Copyright 2004. Акционерное общество Центр Автоматизированного Обучения. 196210, С.-Петербург, ул. Пилотов, 38. Телефон: (812) 104 1896; FAX: (812) 104 1896. E-mail: cecltd@mail.wplus.net Все права защищены. Второе издание отпечатано в С.-Петербурге, Российская Федерация. Опубликованный материал проверен со всей тщательностью. Однако издатель допускает наличие в нем неточностей вследствие ошибок оператора или аппаратуры. Издатель не берет на себя ответственность за возможный ущерб или потери, связанные с использованием такого материала. 5001000000-01 93В(03) - 04 ISBN 5-88856-102-9 ______________________________________________________________________ 01.04.2004 АО Центр автоматизированного обучения. Заказ 001.04 - 200 экз. WINWORD: ЗОН НАВИГАЦИЯ Оглавление Стр. Введение.....................................................................................................................................5 Термины......................................................................................................................................7 Аббревиатуры............................................................................................................................9 1. Принципы зональной навигации.............................................................................................12 1.1. Зональная навигация ..................................................................................................................12 1.2. Бортовое оборудование RNAV ...................................................................................................15 1.3. Требуемые навигационные характеристики ...............................................................................19 1.4. Типы RNP.....................................................................................................................................21 1.5. Требования к воздушному пространству ....................................................................................23 1.6. Требования к воздушным судам и членам летного экипажа .....................................................23 1.7. Базовая зональная навигация.....................................................................................................25 1.8. Точная зональная навигация ......................................................................................................25 1.9. Зональная навигация с установленными типами RNP...............................................................27 1.9.1. Концепция удерживания..............................................................................................................27 1.9.2. Характеристика требований RNP RNAV.....................................................................................30 1.10. Эксплуатационные характеристики GNSS, как одного из основных датчиков RNP-RNAV....................................................................................................................33 1.11. Три статуса бортовых навигационных систем.................................................................. .........34 1.12. Точки пути и фиксированные точки в системе RNAV....................................................... .........37 1.13. Типы маневров RNAV в районе аэродрома...................................................................... .........40 1.13.1. Указатели окончания траекторий ................................................................................................40 1.13.2. Особенности прохождения точек пути........................................................................................43 1.14. Процедуры маневрирования.......................................................................................................46 1.14.1. Зона ожидания.............................................................................................................................46 1.14.2. Процедуры вылета ......................................................................................................................48 1.14.3. Процедуры прибытия и захода на посадку.................................................................................49 1.14.4. Закрытые и открытые маршруты прибытия................................................................................53 1.14.5. Переходные участки....................................................................................................................56 1.14.6. Заход на посадку с вертикальным наведением..........................................................................56 1.15. Критерии учета препятствий захода на посадку и вылета............................................... .........62 1.16. Критерии учета препятствий при полете по маршруту .................................................... .........63 1.17. Изменение чувствительности индикатора боковых отклонений...................................... .........64 2. Функциональные дополнения GNSS ......................................................................................66 2.1. Основные недостатки GNSS .......................................................................................................66 2.2. Типы функционального дополнения GNSS ................................................................................66 3 2.2.1. Бортовые функциональные дополнения ....................................................................................66 2.2.2. Оценка эксплуатантом готовности системы GPS как одного из датчиков оборудования RNAV....................................................................................................................70 2.2.3. Наземные функциональные дополнения....................................................................................72 2.2.4. Спутниковые системы функционального дополнения ...............................................................73 3. Описание процедур RNAV в документах аэронавигационной информации и базах данных ...................................................................................................77 4. Фразеология радиообмена при выполнении процедур RNAV................................... ........83 5. Общая концепция системы CNS/ATM В ЕВРОПЕЙСКОМ РЕГИОНЕ ....................................84 Литература...................................................................................................................................................94 ПРИЛОЖЕНИЕ. Нормативные документы, содержащие вопросы зональной навигации .................................................................................................................................95 1. Некоторые положения документа JAA TGL10 .................................................................... .......95 2. Распоряжение Минтранса РФ по вопросу P-RNAV ....................................................................111 4 ВВЕДЕНИЕ Любой человек, причастный к навигации, на протяжении последних десяти лет был свидетелем изменений в области аэронавигации, произведенной глобальной навигационной спутниковой системой. В настоящее время воздушное судно может следовать в любой пункт без использования наземных навигационных средств наведения. С появлением спутниковой системы навигация качественно изменилась она стала более точной. Однако навигация является лишь одной из составляющих общего процесса выполнения полетов. И в этой связи ее необходимо рассматривать в общей концепции - связь, навигация, наблюдение и организация воздушного движения, - разработанной ИКАО в 80-х годах прошлого столетия. Разработанная ИКАО концепция навигации будущего базируется на зональной навигации. Принцип зональной навигации позволяет воздушному судну выполнять полет по любой желаемой траектории и тем самым реализовать преимущества повышенной точности навигации в совершенствовании структуры воздушного пространства, что влечет за собой упрощение обслуживания воздушного движения, а самое главное - сокращение расходов эксплуатантов воздушных судов. Важно отметить и тот факт, что применение зональной навигации существенно повлияло и на технологию работы членов летного экипажа, что обусловило появление новых навигационных процедур. В первую очередь, это проявилось в правилах эксплуатации спутниковых навигационных систем (СНС). С одной стороны, с установкой СНС на борту воздушных судов процесс навигации существенно упростился, а с другой - некорректная эксплуатация таких систем (например, ошибочный ввод координат пункта маршрута) может существенно повлиять на точность навигации, а, следовательно, и на безопасность полета. Можно привести примеры, когда ошибочный ввод кодификатора пункта маршрута приводил к уклонению самолетов. И в этой связи четкое выполнение процедур перекрестных проверок позволит избежать непреднамеренного ошибочного ввода координат и наименований пунктов маршрутов. 5 Появление новых типов схем захода на посадку и вылета также требует от членов летного экипажа знания правил построения таких схем и специфики их выполнения. К сожалению, отсутствие учебных пособий по особенностям выполнения полетов с применением метода RNAV не способствует качественной реализации всех преимуществ данного способа навигации. В этой связи авторы надеются, что данное учебное пособие позволит: - летному составу глубже понять нюансы зональной навигации; - диспетчерскому составу органов ОВД более осознано представлять дей- ствия летных экипажей ВС и пользоваться преимуществами применения RNAV; - будуш,им пилотам, штурманам и диспетчерам ОВД осознать, что зональная навигация это то, что их ожидает по окончании учебного заведения. Касаясь структуры учебного пособия, необходимо отметить, что авторы стремились осветить вопросы не только зональной навигации, но и дать читателю представление о развитии концепции: связь, навигация, наблюдение и организация воздушного движения в Европейском воздушном пространстве, в котором после 2006 странства. года Кроме планируется того, внедрение учитывая, что Единого европейского некоторые воздушного нормативные положения пропо подготовке воздушных судов и эксплуатантов гражданской авиации России к полетам в системе точной зональной навигации P-RNAV в Европейском регионе содержат материал по практическому применению авторы посчитали необходимым дать их в Приложении. 6 для членов летного экипажа, ТЕРМИНЫ С внедрением в авиационную практику зональной навигации и концепции требуемых навигационных характеристик, авиационный лексикон обогатился многими новыми терминами, которые изначально были сформулированы на английском языке - международном языке аэронавигации. Соответствующие им русские термины лишь недавно стали использоваться в отечественной литературе и их еще нельзя считать устоявшимися. К сожалению, также и переводы определений соответствующих понятий, приведенные в документах ИКАО, не всегда выполнены удачно, что затрудняет уяснение их содержания. Тем не менее, в нижеследующем перечне термины и их определения приведены в той формулировке, в какой они содержатся в переводах на русский язык в документах ИКАО, RTCA, JAA и т.д. Более подробно содержание большинства этих терминов обсуждается в тексте учебного пособия. Поместив аббревиатуры в начале учебного пособия, авторы преследовали цель не загромождать изложение материала расшифровкой каждый раз, когда они упоминаются по тексту. Величина (дистанция) удерживания - расстояние от планируемого местонахождения, в пределах которого воздушные суда будут находиться в течение как минимум 95% общего полетного времени (см. также термин "предел удерживания") [1]. Вертикальная навигация - метод навигации, который позволяет воздушному судну выполнять полеты по вертикальным профилям с использованием датчика высоты, внешнего сигнала заданной траектории или их комбинации [2]. Готовность (Availability) - показатель способности системы обеспечивать надлежащее обслуживание в пределах установленной зоны действия. Определяется в виде интервала времени, в течение которого система должна использоваться для навигации [3]. Зона действия радионавигационной системы - площадь поверхности или объем пространства, в пределах которых мощность сигналов является достаточной для того, чтобы пользователь мог определить местоположение с установленным уровнем точности. Зона действия зависит от геометрии системы, уровней мощности сигналов, атмосферных шумов и прочих факторов, влияющих на прием сигналов [3]. Зональная навигация RNAV - метод навигации, который ному судну выполнять полет по любой желаемой траектории [1]. позволяет воздуш- Круговая зона защищенности (CPA) - круговая зона защищенного воздушного пространства с центром в желаемом местоположением ВС [1]. Примечание. Круговая зона защищенности определяется типом RNP и возможностями вмешательства органов ОВД (связь и наблюдение). Навигационное наведение — расчет команд управления для выдерживания намеченной линии пути от текущего местоположения ВС к новому местоположению [3]. Навигация — способ наведения воздушного судна для выполнения полета от одного известного местоположения к другому известному местоположению [3]. 7 Непрерывность обслуживания (Continuity of function) — способность всей системы функционировать без непредсказуемых прерываний во время выполнения намеченного полета [2]. Оборудование RNAV - комплекс навигационного оборудования, используемого для обеспечения наведения RNAV [4]. Общая погрешность системы (Total System Error - TSE) - в боковом измерении представляет собой сочетание погрешности навигационной системы, погрешности расчета RNAV, погрешности системы отображения и погрешности техники пилотирования [3] Погрешность техники пилотирования (Flight Technical Error - FTE) - точность пилотирования ВС, которая измеряется путем сопоставления индикаторного местоположения ВС с индикаторным заданным или намеченным местоположением. Эта погрешность не включает грубые ошибки [3]. Предел удерживания - зона вокруг желаемого местоположения ВС, определенного бортовой навигационной системой, внутри которой находится ВС с вероятностью 99,99% (см. также термин "величина удерживания") [1]. Примечание. Предел удерживания включает RNP, целостность и непрерывность удерживания, но не включает возможность вмешательства органов ОВД. Система управления полетом (Flight Management System - FMS) - комплексная система, которая включает в себя бортовой датчик, приемник и вычислитель с базами навигационных данных и данных о летно-технических характеристиках ВС и выдает данные о характеристиках и наведении RNAV на дисплей и для ввода в автоматическую систему управления полетом [3]. Точность использования системы - сочетание погрешности навигационного датчика, погрешности бортового приемника, погрешности отображения и погрешности, обусловленной техникой пилотирования. Также называется точностью выдерживания навигационных характеристик [3]. Точность выдерживания навигационных характеристик - общая погрешность системы (TSE), допускаемая в боковом и продольном измерениях. TSE в каждом измерении не должна превышать норм для установленного типа RNP в течение 95% полетного времени на любом участке одного полета [1]. Точность - степень Точность радионавигации системы и указывается как: соответствия расчетного и измеренного местоположения. обычно выражается статистической мерой погрешности 1) прогнозируемая - точность фических или геодезических координат; местоположения относительно земных геогра- 2) повторяемая - точность, с которой пользователь может возвратиться в местоположение, координаты которого были измерены в предшествующий момент времени той же навигационной системой; 3) относительная - точность, с которой пользователь может определить одно местоположение относительно другого местоположения независимо от любой погрешности определения соответствующих истинных местоположений [3]. Требуемые навигационные характеристики RNP - показатель точности выдерживания навигационных характеристик, необходимых для выполнения полетов в пределах установленного воздушного пространства [1]. Целостность (Integrity) - способность системы своевременно выдавать пользователям предупреждения в тех случаях, когда система не должна использоваться для навигации [3]. 8 Baro-VNAV - метод навигации, при котором навигационная система выдает пилоту вычисленное вертикальное наведение относительно установленного угла траектории в вертикальной плоскости с номинальным значением 3°. АББРЕВИАТУРЫ ASM Air Space Management Организация воздушного пространства ATS Air Traffic Service Обслуживание воздушного движения ATFM Air Traffic Flow Management Организация потоков воздушного движения CNS/ATM Communication Navigation Surveillance /Air Traffic Management Связь, навигация, наблюдение/обслуживание воздушного движения МЕТ Meteorology Метеорологическое обеспечение AAIM Aircraft Autonomous Integrity Monitoring Airborne Based Augmentation System Aircraft Communications Addressing and Reporting System Автономный контроль целостности на борту ВС Бортовая система функционального дополнения Система связи воздушных судов для адресации и передачи сообщений ACAS Airborne Collision Avoidance System Бортовая система предупреждения столкновения (европейское название) ADS Automatic Dependent Surveillance Автоматическое зависимое наблюдение (АЗН) ADS-B ADS Broadcast АЗН-В - АЗН в режиме радиовещания AFTN Aeronautical Fixed Telecommunications Network Сеть авиационной фиксированной электросвязи AIS Aeronautical Information Service AMSS Aeronautical Mobile Satellite System Обеспечение аэронавигационной информацией Подвижная (бортовая) система спутниковой связи APV Vertical path angle Угол траектории в вертикальной плоскости ATN Aeronautical Telecommunications Network Телекоммуникационная сеть авиационной связи ABAS ACARS A-SMGCS Advanced Surface Movement Guidance and Control System Усовершенствованная система контроля и управления наземным движением (в аэропортах) CPDLC Controller Pilot Data Link Communications Линия передачи данных между пилотом и диспетчером (цифровая связь) CDI Course Deviation Indicator Индикатор отклонения от линии заданного пути CNS Communication, Navigation and Surveillance Связь, навигация и наблюдение DER Departure End Runway Выходной торец ВПП 9 (E)HIS (Electronic) Horizontal Situation Indicator (Электронный) индикатор горизонтальной обстановки FAA Federal Aviation Authority Федеральные авиационные власти (США) FANS Future Air Navigation Systems (ICАО Panel) Специальный комитет ИКАО по будущим аэронавигационным системам ' FAVVP Final Approach Waypoint Обозначение FAP в зональной навигации FDE Fault Detection and Exclusion Выявление и исключение неисправности FMS Flight Management System Система управления полетом FTE Flight Technical Error Погрешность пилотирования GBAS Ground Based Augmentation System Наземная система функционального дополнения GNSS Global Navigation Satellite Systern Глобальная спутниковая навигационная система GPS Global Positioning System Система глобального определения местоположения IAVVP Initial Approach Waypoint Обозначение IAP в зональной навигации INS Inertia! Navigation System Инерциальная навигационная система ISO-OSI Международная организация по стандартизации - взаимодействие открытых систем JAA Join Aviation Authority LAAS Local Area Augmentation Sуstem Объединенные авиационные власти (государств ЕС) Дополнительная система с локальной зоной действия МЕА Minimum Enroute Altitude Минимальная абсолютная высота МEL Minimum equipment list Перечень минимального оборудования OPS Operations Выполнение полетов (наземное движение ВС) MASPS Minimum Aircraft System Performance Specification Технические требования к. минимальным характеристикам бортовых систем ВС MEL Minimum Equipment List Перечень минимального (требуемого) оборудования МОС Minirnun Obstacle Clearance Минимальный запас высоты (над препятствием) Mode S Mode Select Transponder (А, С & S) Ответчик, работающий в форматах А, С и S PDOP Position Dilution of Precision Снижение точности определения местоположения RA Resolution Advisory Разрешение угрозы RAIM Receiver Autonomous Integrity Monitoring Автономный контроль целостности приемника RIAP RNAV Initial Approach Ргосеdure. Процедура захода на посадку RNAV до FAF 10 RNAV Area Navigation Зональная навигация RCP Required Communication Performаnсе Требуемые характеристики связи RNP Required Navigation Performаnсе Требуемые навигационные характеристики RSP Required Surveillance Performаnсе Требуемые характеристики наблюдения RTA Required Time of Arrival Заданное время прибытия RTSP Required Total System Performance Требуемые характеристики всей системы CNS/ATM RTCA Requirements and Technical Concepts for Aviation Технические концепции и требования в авиации RVSM Reduced Vertical Separation Minima Сокращенные минимумы вертикального эшелонирования SBAS Satellite Bаsеd Augmentation System Спутниковая система функционального дополнения SOPs Standard Operation Procedures Стандартные навигационные процедуры SSR Secondary Surveillance Radar Вторичный радиолокатор TCAS Traffic Alert Collision Avoidance Система предупреждения столкновения System TMA Terminal Control Area Район аэродрома/аэроузла TNAV Time Navigation Зональная навигация по времени TSE Total System Error Общая погрешность системы TSO Technical Standard Order Распоряжение на технический стандарт VDL VHF Digital Link Линия передачи цифровых данных в УКВ диапазоне VNAV WAAS Vertical Navigation Wide Area Augmentation System Вертикальная навигация Дополнительная система с широкой зоной действия WGS-84 Wold Geodetic System 1984 Всемирная геодезическая система 1984 г. WPT Точка пути Way point ГЛОНАСС Глобальная навигационная спутниковая система КПП Комбинированный пилотажный прибор КС ПНО Комплексная система пилотажно-навигационного оборудования ОВД Обслуживание воздушного движения ПИП Пилотажно-навигационный прибор ПУИ Пульт управления и индикации РК Руководство по качеству РТС Радиотехническая система РТО Руководство по техническому обслуживанию 11 1. ПРИНЦИПЫ ЗОНАЛЬНОЙ НАВИГАЦИИ 1.1. Зональная навигация В зарубежной практике на протяжении многих десятилетий маршруты полетов ВС строились таким образом, чтобы они проходили через наземные радиомаяки как правило, радиомаяки VOR. Поскольку полет выполнялся «на» или «от» радиомаяка, бортовое оборудование (аналог отечественного КУРС МП) непосредственно определяло и индицировало на указателях типа ПНП (CDI или HIS) сторону и величину углового уклонения ВС. Это позволяло пилоту легко сохранять линию заданного пути, удерживая планку в центре прибора. Наличие у летного экипажа в любой момент времени информации об отклонении от заданной траектории получило название навигационного наведения (guidance). Наведение практически на каждом участке маршрута и схемы маневрирования в районе аэродрома давно стало необходимым и само собой разумеющимся условием осуществления аэронавигации в большинстве стран мира. Возрастание интенсивности воздушного движения к середине 80-х годов привело к тому, что обычных трасс, проходящих через радиомаяки, во многих регионах уже было недостаточно для обеспечения требуемой пропускной способности воздушного пространства. Стала обсуждаться возможность полетов по произвольным траекториям, не обязательно проходящим через радиомаяки. Для обеспечения таких полетов на борту ВС необходимо: 1) получать информацию о текущем местоположении ВС; 2) представлять информацию для пилота в виде отклонения от заданной траектории (обеспечить наведение). Решение первой из этих задач первоначально основывалось на использовании угломерно-дальномерной системы, образованной радиомаяками VOR/DME, и позволяющей непрерывно измерять пеленг и дальность ВС. Для решения второй задачи необходимо было иметь бортовой вычислитель, способный непрерывно рассчитывать по пеленгу и дальности линейное боковое уклонение и оставшееся расстояние, то есть преобразовывать полярные координаты в частноортодромические. Именно в этот период времени в бортовые навигационные системы стала интенсивно внедряться только что появившаяся компьютерная техника, что оказалось очень кстати для решения этой задачи. Такая навигация по маршрутам, не проходящим через радиомаяки, получила название «зональной навигации» (area navigation, RNAV), поскольку ее осуществление было возможно только при нахождении ВС в пределах зоны действия (range, area) радиомаяка. Впоследствии для определения местоположения ВС стали использоваться и другие средства: инерциальные системы счисления координат, разностно-дальномерные и спутниковые системы. Несмотря на то, что теперь уже не было необходимости находиться в определенной «зоне», сам термин «зональная навигация» сохранился. История развития зональной навигации отразилась в том, каким образом давалось определение этого понятия в документах ИКАО. Если первоначально подразумевались только полеты в пределах зоны действия радиомаяков, то с появлением возможности автономного счисления пути понятие RNAV было расширено, и в первом издании документа [1] его определение давалось уже следующим образом: «Зональная навигация - метод навигации, позволяющий воздушным судам выполнять полет по любой желаемой траектории в пределах действия радиомаяч- 12 ных навигационных средств или в пределах, определяемых возможностями автономных средств или их комбинацией». Однако это определение оказалось излишне подробным. Поскольку такая навигация может осуществляться как в пределах зоны действия маяков, так и вне ее, то зачем вообще упоминать об этом в определении? И уже второе издание этого же документа приводит определение в ныне существующем виде: «зональная навигация — метод навигации, который позволяет воздушному судну выполнять полет по. любой желаемой траектории». Можно обратить внимание, что в этом кратком определении отсутствует в явном виде один из ключевых элементов RNAV - необходимость наведения по этой желаемой траектории. Из-за этого у российского пилота, впервые встретившегося с данным понятием, может возникнуть недоумение: а разве я без всякой зональной навигации не могу летать, как желаю? Но для зарубежных летчиков никакой неясности нет. Для них необходимость наведения является нормой - что за навигация без наведения? В определении ИКАО зональная навигация названа «методом» навигации. Повидимому, это не совсем корректно. Ведь для осуществления RNAV могут использоваться самые разные методы навигации, способы определения местоположения ВС. Они могут быть основаны на использовании радиотехнических систем, систем счисления пути или, в перспективе, на каких-то иных принципах. Для сущности зональной навигации это безразлично. Да и не может «навигация» быть «методом навигации», то есть способом осуществления самой себя. Зональная навигация не метод, а разновидность навигации, которая отличается от обычной лишь двумя чертами: возможностью задания произвольных траекторий и обеспечением наведения при полете по ним. Поэтому более точное определение RNAV могло бы выглядеть следующим образом: «зональная навигация - навигация с использованием технических средств, обеспечивающих наведение при полете по любой желаемой траектории». Оборудование, обеспечивающее возможность такой навигации, стали называть «оборудованием зональной навигации» или «оборудованием RNAV». Оно должно автоматически определять местоположение ВС по одному или нескольким навигационным датчикам и вычислять расстояние вдоль линии пути, боковое отклонение, время полета до выбранного пункта, а также обеспечить непрерывную индикацию отклонения на приборе типа ПНП или КПП, то есть обеспечить собственно наведение. Сама же траектория задается, как правило, геодезическими координатами (широтой и долготой) нескольких ее точек, называемых точками пути (waypoints). Для отечественной аэронавигации принципы зональной навигации не являются чем-то абсолютно новым. Ведь в нашей стране, в отличие от зарубежной практики, воздушные трассы часто проходят через такие поворотные пункты маршрута, в которых не установлены никакие навигационные средства. Наведение при этом обычно отсутствует, и поэтому выдерживание ЛЗП в этом случае является более сложной для летных экипажей задачей. Это одна из причин наличия на борту ВС штурмана как члена экипажа. Но в некоторых случаях обеспечивалось и наведение по произвольным линиям пути. Элементы зональной навигации в СССР впервые были реализованы в начале 60-х годов с появлением радиотехнической системы ближней навигации (РСБН). Наличие на борту в составе этой системы блока управления счетно-решающего прибора (БУ СРП) позволяло выполнять полет по линии пути, не проходящей через радиомаяк. При этом вертикальная планка прибора КПП показывала пилоту, с какой стороны находится ЛЗП, то есть осуществлялось наведение. Правда, точность, обеспечиваемая аналоговым вычислителем СРП, была не очень высока, да и не все самолеты имели такое оборудование. К тому же отсутствовало сплошное перекры- 13 тие зон радиомаяков на территории страны, а полеты разрешалось выполнять только по установленным воздушным трассам. Поэтому в те годы такой подход к навигации не получил широкого распространения, но по существу это и была RNAV. Траектория планируемого полета может быть задана не только в горизонтальной плоскости в виде маршрута, но и в вертикальной - путем задания высот пролета точек пути, углов или градиентов наклона траектории. Кроме того, может быть задана пространственно-временная траектория, когда для некоторых точек задано время их пролета. В соответствии с размерностью (Dimension) «пространства», в котором осуществляется наведение, зональную навигацию разделяют на три вида: - 2D-RNAV - двухмерная RNAV в горизонтальной плоскости - LNAV (Lateral Navigation). Иногда, используя дословный перевод, ее называют боковой навигацией, поскольку наведение осуществляется только по боковому уклонению; - 3D-RNAV - трехмерная RNAV в горизонтальной и вертикальной плоскостях. Для навигации в вертикальной плоскости испопьзуется аббревиатура VNAV (Vertical Navigation); - 4D-RNAV - четырехмерная RNAV в горизонтальной и вертикальной плоскостях плюс решение задачи регулирования скорости полета для прохождения пунктов маршрута или прибытия на аэродром в заданное время. Зональная навигация по времени сокращенно обозначается TNAV (буква Т от слова Time). Проблема внедрения зональной навигации состоит не просто в том, чтобы обеспечить полет по произвольной траектории, а в том, чтобы точность ее выдерживания соответствовала установленным в данном регионе требованиям. В современной аэронавигации эти требования устанавливаются в виде так называемых требуемых навигационных характеристик (RNP Required Navigation Performance). Поэтому вопросы зональной навигации оказались тесно переплетены с проблемами RNP. Настолько тесно, что ныне эти два круга вопросов оказались объединенными в одном документе ИКАО. Ранее концепция RNAV и требования к ней содержались в документе ИКАО «Руководство по зональной навигации». В настоящее время он прекратил свое существование, но весь его материал вошел в «Руководство по требуемым навигационным характеристикам RNP» [1]. Теперь RNP рассматривается как инструмент технического и нормативного регулирования полетов с применением RNAV. В зависимости от жесткости требований к точности выдерживания заданной траектории, а также от характера функциональных требований к бортовому оборудованию, широко используются следующие обозначения типов RNAV: - B-RNAV (Basic RNAV) - основная (базовая) зональная навигация; - P-RNAV (Precision RNAV) - точная зональная навигация; - RNP-RNAV - зональная навигация с требуемыми навигационными характеристиками. В чем именно заключаются требования к каждому из этих типов навигации, будет рассказано ниже. RNAV рассматривается ИКАО как основной вид навигации будущего, поскольку она обладает целым рядом неоспоримых преимуществ перед навигацией обычной, традиционной: 1. Полеты становятся более безопасными за счет повышения точности навигации. Это связано с тем, что при введении RNAV в каком-пибо регионе одновременно вводятся и требования к точности (в виде RNP). 2. Увеличивается пропускная способность и эффективность использования воздушного пространства как на маршрутах, так и в районах аэродромов. Это происходит с одной стороны за счет увеличения количества маршрутов в данном объеме воздушного пространства (теперь они не обязательно должны проходить через радиомаяки), а с другой - за счет уменьшения интервалов бокового 14 диомаяки), а с другой - за счет уменьшения интервалов бокового эшелонирования, которое оказывается теперь возможным, поскольку точность навигации стала выше. 3. Появляется возможность сделать структуру маршрутов динамичной, легко меняющейся в зависимости от обстановки. При этом могут быть учтены интересы как гражданской, так и государственной авиации. Гибкость RNAV позволяет избежать скопления ВС в определенных участках воздушного пространства, серьезных уплотнений маршрутов и появления «воздушных пробок». 4. Маршруты можно устанавливать более короткими, что приводит к экономии авиатоплива и уменьшению летного времени. 5. При наличии наведения летный экипаж более наглядно представляет себе навигационную ситуацию, что позволяет избежать неправильных решений и ошибок. 6. Уменьшается нагрузка как пилота, так и диспетчера за счет возможности отказаться от радиолокационного наведения (векторения), осуществляемого диспетчером в районе аэродрома. 7. Оказывается возможным сократить количество наземных навигационных средств. При применении методов RNAV должны быть выполнены следующие обязательные условия: - если оборудование RNAV использует сигналы наземных или спутниковых средств, то оно должно устойчиво принимать эти сигналы на всем протяжении полета по маршруту или маневрирования в районе аэродрома; - координаты точек пути (WPT - waypoints) должны определяться и публиковаться в АИП государств во Всемирной геодезической системе координат WGS-84 и с требуемой точностью, разрешением и целостностью: - оборудование RNAV должно быть сертифицировано для выполнения полета по маршруту и в районе аэродрома; - летный экипаж должен иметь допуск к выполнению полетов по маршрутам RNAV и в районе аэродрома. 1.2. Бортовое оборудование RNAV Для реализации принципа зональной навигации на борту ВС должны решаться следующие задачи: - определение текущего местоположения ВС; - хранение информации о маршруте полета, по которому должно осуществляться наведение, - определение отклонения от ЛЗП, оставшегося расстояния и других, необходимых для навигации параметров; - индикация отклонения на приборной панели пилотов и, при необходимости передача этого отклонения в автопилот. В соответствии с положениями [1], в качестве источников информации о местоположении могут использоваться угломерная система VOR, дальномерная система DME, разностно-дальномерная система LORAN-C, инерциальная навигационная система (ИНС), глобальная спутниковая навигационная система GNSS. Дадим краткую характеристику различных способов определения местоположения, обеспечиваемых перечисленными системами, расположив их в порядке возрастания точности. VOR/DME. Это самый старый из способов, применяемых в RNAV. В принципе, он заключается в преобразовании бортовым компьютером пеленга и дальности от радиомаяка в линейное боковое уклонение от ЛЗП, оставшееся расстояние и расчете на их основе всех других необходимых для RNAV элементов. В наиболее простых видах оборудования, обеспечивающих такой способ, радиомаяк как бы «смещается» в точку пути, на которую следует ВС, и осуществляется наведение на этот мнимый радиомаяк. Местоположение точек пути задается в этом случае не геодезическими 15 координатами, а пеленгом и дальностью от VOR. При этом оборудование должно давать возможность ввода не менее трех точек пути. Невысокая точность данного способа определения координат связана в основном с азимутальным каналом системы, то есть с VOR. В любых угломерных системах линейная погрешность определения местоположения возрастает пропорционально удалению от радиомаяка. В соответствии с данными, приведенными в [19], суммарная средняя квадратическая погрешность определения пеленга по VOR, учитывающая погрешности бортового и наземного оборудования, составляет порядка 1°-2°. Это значение ограничивает максимально допустимую дальность использования радиомаяка, которая зависит, конечно, и от требований к точности навигации в данном районе. Эта дальность может меняться от 20 до 100 м. миль (соответственно для RNP 0.3 и RNP 2). LORAN-C Это импульсно-фазовая разностно-дальномерная радионавигационная система, первоначально предназначаемая для судовождения, но широко используемая и в авиации. Станции этой системы объединены в цепочки из-3-5 станций, обслуживающих большой район и работающих совместно по синхронизированному графику излучения. Максимальная дальность действия системы составляет обычно до 1000 м. миль. Советский аналог данной системы - РСДН-10 (Радиотехническая система дальней навигации). Бортовое оборудование, работающее с этой системой, например отечественный «КВИТОК» (А-723), обеспечивает определение и индикацию геодезических координат (широты и долготы), ввод маршрута полета, определение уклонения и расчет многих других навигационных параметров. В принципе LORAN-C (РСДН-10) обладает неплохой точностью (погрешность определения линии положения порядка 0,5 км), но имеет и недостатки. Она подвержена влиянию как естественных, так и искусственных помех. Изменение проводимости поверхности Земли, атмосферные помехи, низкочастотные излучения линий электропередач и прочие факторы могут непредсказуемо понизить точность системы. К тому же, отказ даже одного из передатчиков цепочки приведет к прекращению обслуживания всего региона. Поэтому использование LORAN-C для RNAV будет ограничено районами с хорошими характеристиками приема сигнала поверхностной волны. Использование же этой системы как основного источника информации в условиях повышенных требований RNP RNAV и, тем более, в системе CNS/ATM не предполагается. ИНС. Инерциальные навигационные системы являются автономными системами определения местоположения ВС на основе счисления координат. Измеренные акселерометрами ускорения ВС по трем осям координат интегрируются цифровым вычислителем, что дает возможность получить координаты места ВС и всю другую необходимую для навигации информацию. В традиционных ИНС акселерометры устанавливают на стабилизированной по азимуту и вертикали гироплатформе. В современных ИНС платформа отсутствует, акселерометры жестко связаны с ВС, а их угловая ориентация определяется по сигналам лазерных датчиков угловых скоростей (на отечественном авиационном сленге их называют «лазерными гироскопами», что, по сути, конечно, неправильно). Общей чертой любой системы счисления пути является возрастание погрешностей определения координат с увеличением продолжительности полета, поэтому их и характеризуют величиной «ухода» счисленного места самолета от фактического за час полета. В «Руководстве по требуемым навигационным характеристикам» приведено значение этой величины, равное 1,5 – 2 м. мили за час, но современные бесплатформенные ИНС обеспечивают и более высокую точность. Так, по экспериментальным данным, полученным в АО «Аэрофлот» на самолетах Ил-96-300, на которых установлена американская ИНС «Litton-90-100», средняя квадратическая радиальная погрешность определения места самолета этими системами имеет порядок 0,5 м. миль в час. 16 Тем не менее, по причине возрастания погрешностей ИНС не могут использоваться в качестве оборудования RNAV без периодической коррекции счисленных координат по другим средствам (СНС, DME и т.д.). На борту ВС обычно устанавливается три одинаковых комплекта ИНС, что позволяет повысить точность и надежность навигации. Для повышения функциональной надежности системы и увеличения возможной продолжительности полета до очередной коррекции координат в современных навигационных комплексах используются различные алгоритмы комплексной обработки информации - от простого осреднения координат, выданных тремя идентичными ИНС, до сложных алгоритмов оптимальной фильтрации. Следует отметить, что в настоящее время роль систем счисления пути в навигационных комплексах меняется на прямо противоположную. На протяжении долгого времени они использовались как основное средство, позволяющее непрерывно определять координаты, а другие средства использовались только для коррекции. Теперь же, с появлением СНС, которые также практически непрерывно выдают гораздо более точные координаты, системы счисления пути уже стали играть роль вспомогательного средства, которое используется для контроля спутниковой информации, а также для определения места ВС в те непродолжительные промежутки времени, когда целостность СНС не обеспечивается. Такой подход реализован при разработке отечественной навигационной интегрированной системы НСИ-2000, а также в некоторых других зарубежных и российских навигационных системах. Наличие в составе навигационного комплекса ИНС, СНС и цифрового вычислителя полностью обеспечивает решение всех задач RNAV, включая ввод и сохранение маршрута полета, наведение по линии пути. DME/DME. Дальномерный способ определения координат (по дальностям до двух радиомаяков DME) обеспечивает более высокую точность определения местоположения, чем угломерно-дальномерный. Это обусловлено достаточно высокой точностью измерения дальностей и сравнительно медленным возрастанием погрешностей по мере увеличения самой дальности. Так, вблизи радиомаяка средняя квадратическая погрешность измерения дальности составляет около 0,1 м. мили, а на удалении 140 м. миль имеет порядок 1,8 м. мили. Для определения местоположения дальномерным способом ВС должно находиться одновременно в зонах действия двух радиомаяков. Над территорией Европы и США это условие, как правило, с избытком обеспечивается, поэтому способ «DME/DME» рассматривается ИКАО как один из основных методов RNAV в континентальных районах наряду с методами спутниковой навигации. GNSS. К глобальным спутниковым навигационным системам относят действующие в настоящее время американскую GPS Navstar (чаще на нее ссылаются просто как на GPS) и отечественную ГЛОНАСС. Планируется внедрение и других спутниковых систем. GNSS основаны на псевдодальномерном способе определения координат. Значение средней квадратической погрешности измерения дальности, которое [19] рекомендует использовать для оценки соответствия RNP RNAV, составляет 33 метра (по более поздним источникам см. табл. 1.4). Наряду с высокой точностью, приемо-индикаторы СНС обеспечивают решение практически всех задач, которые необходимы для RNAV. Это делает GNSS основной системой, на которой базируется зональная навигация в настоящее время и, тем более, в будущем при внедрении CNS/ATM. Для обеспечения наведения по информации от перечисленных датчиков необходимо рассчитать отклонение от заданной траектории и другие требуемые для RNAV параметры. С этой целью могут использоваться либо вычислители (компьютеры), входящие в состав бортового оборудования самих навигационных систем (GNSS, LORAN-С, ИНС), либо вычислитель бортовой системы управления полетом (FMS). 17 Индикация отклонения от заданной траектории также может осуществляться на индикаторах самих систем либо выведена на приборную доску пилота - указатели типа ПНП. Оборудование RNAV должно иметь связь с автопилотом или, по крайней мере, допускать возможность такой связи. «Руководство по требуемым навигационным характеристикам» [1] определяет функциональные требования к оборудованию зональной навигации. Это означает, что не предъявляются требования установить какие-либо системы конкретного типа или принципа действия, а просто требуется, чтобы выполнялись определенные функции, решались необходимые задачи. Функции, выполняемые оборудованием RNAV, разделены на обязательные и желательные. Обязательные функции: 1 Индикация координат текущего места ВС (в виде широты и долготы либо пеленга и дальности до выбранной точки пути). 2 Выбор или ввод пилотом требуемого плана полета (маршрута) с пульта управления и индикации. 3 Хранение аэронавигационных данных в объеме, достаточном для выполнения активного плана полета, а также возможность в любой момент изменять данные плана полета в любой его части. 4. Возможность в полете работать с планом полета (составлять, проверять, изменять), не оказывая влияния на наведение по линии пути: а) выполнение измененного плана полета только с санкции летного экипажа; б) возможность формирования и проверки альтернативного плана полета, не отключая активный план; в) возможность формирования плана хотя бы одним из следующих способов: - путем ввода обозначений маршрутов; - выбором точек пути из базы данных; - путем ввода точек пути пользователя, задавая их широтой и долготой, пеленгом и дальностью, либо другим способом. 5. Возможность формирования планов полетов сопряжением маршрутов или участков маршрутов. 6. Обеспечение возможности контроля и корректировки отображаемого на индикаторах места ВС. 7 . Обеспечение возможности автоматической смены участков маршрута и выполнения разворотов с учетом ЛУР, а также возможности вручную изменять очередность пролета точек пути (в частности, для полета в обратном направлении). 8. Индикация на ПУИ бокового отклонение от ЛЗП. 9. Индикация на ПУИ времени полета до точек пути. 10. Возможность выполнять маневры и выдерживать следующие типы траекторий: - выполнение полета от текущего места прямо на заданную точку (Direct-To или GOTO); - выполнение полета со смещением (OFFSET, РТК) на заданную величину, то есть полета по параллельной ЛЗП. При этом должна обеспечиваться четкая индикация того, что включен режим смещения. 11. Аннулирование предыдущих коррекций места по РТС. 12. Выдерживание схемы ожидания с применением RNAV. 13. Предоставление летному экипажу информации о степени точности и надежности текущих координат путем индикации коэффициента точности (например, HDOP) или величины отклонения вычисленного местоположения от полученного с помощью датчиков. 14. Использование системы геодезических координат WGS-84. 15. Обеспечение индикации отказов оборудования. 18 Для воздушного пространства с высокой интенсивностью движения может потребоваться выполнение следующих желательных функций: 1) формирование сигналов для автопилота и командного пилотажного прибора; 2) отображение трехмерных и четырехмерных данных о местоположении; 3) индикация фактического путевого угла; 4) обеспечение не менее 10 активных точек пути на маршруте; 5) обеспечение не менее 20 активных точек в районе аэродрома; 6) предупреждение о приближении к точке пути путем визуальной сигнализации; 7) обеспечение автоматического выбора навигационных средств, проверки целостности навигационной системы, а также целесообразности перехода на ручное управление или повторного выбора; 8) соблюдение требований к характеристикам разворотов; 9) индикация информации о несоблюдении требуемой точности навигации, а также необходимой информации об отказе системы, включая ее датчики. Эти перечисленные в [1] обязательные и желательные функции могут быть конкретизированы при введении зональной навигации в том или ином регионе. 1.3. Требуемые навигационные характеристики Концепция требуемых навигационных характеристик (RNP) является подходом к установлению требований к точности и надежности аэронавигации в том или ином регионе. Идея, лежащая в основе этого подхода, впервые была реализована в регионе Северной Атлантики при введении там минимальных навигационных требований (МНТ) или, что то же самое, MNPS (Minimum Navigation Performance Specifications). В связи с введением в этом регионе сокращенных норм бокового эшелонирования были установлены требования к точности навигации всех ВС, выполняющих попеты в воздушном пространстве MNPS. Эти требования устанавливались в виде средней квадратической погрешности определения места ВС, а также в виде той доли общего времени полета, в течение которой боковое уклонение ВС находилось в требуемых пределах. Например, одно из требований заключалось в том, чтобы за пределами полосы ±30 м. миль ВС находилось не дольше, чем 1 час на 2000 часов полета (точное значение 5,3-10– 4). При этом не требовалось обязательно устанавливать навигационные системы определенного вида - ИНС, приемники РНС «ОМЕGА» или СНС, хотя именно они и использовапись для полетов в этом регионе. Главное - обеспечить требования к траектории полета, а каким именно путем - дело эксплуатанта (авиакомпании). Такой подход, когда требования предъявляются не в форме необходимости установки на борту конкретного вида оборудования, а в виде допустимых пределов отклонений и соответствующих им вероятностей, оказался достаточно продуктивным. Он удобен всем участникам авиационного процесса. Органам ОВД - потому, что они теперь уверены: в их зоне ответственности выполняют полеты только ВС с характеристиками не хуже требуемых. Производителям навигационного оборудования - потому, что для них теперь задана требуемая точность выпускаемых навигационных систем. И авиакомпаниям, летным экипажам определены необходимые ориентиры: какие устанавливать бортовые системы, каков должен быть уровень подготовки экипажей, какие должны быть разработаны навигационные процедуры. Дальнейшее развитие этот подход и получил в концепции RNP, которая была разработана в 1987 г. комиссией ИКАО по будущим навигационным системам (FANSC) и затем развивалась Группой экспертов по рассмотрению общей концепции эшелонирования. 19 RNP, установленные в том или ином районе (области воздушного пространства), характеризуются своим типом (RNP type), который и определяет требуемую точность аэронавигации в этом районе. Как известно, точность навигации характеризуется величиной погрешности выдерживания заданной траектории, которая в [1] называется общей погрешностью системы (TSE - Total System Error). Погрешности рассматриваются отдельно по боковой и продольной координатам. По боковой координате, то есть в направлении, перпендикулярном ЛЗП, TSE представляет собой расстояние между фактическим местоположением ВС и линией заданного пути в навигационной системе. Она включает в себя следующие составляющие: 1. Погрешность навигационной системы. Она характеризует точность датчиков, используемых для определения координат, и включает в себя, в свою очередь, погрешности наземного и бортового оборудования, а также внешние погрешности, возникающие, например, при распространении радиоволн в пространстве. 2. Погрешность вычисления данных RNAV. Возникает при преобразовании информации от датчиков в информацию об отклонении от заданной траектории. Например, пеленга и дальности - в линейное боковое уклонение. 3. Погрешность системы индикации. Возникает при отображении на индикаторах информации, необходимой для наведения: отклонения планки прибора типа ПНП, местоположения ВС на синтезированной карте дисплея и т.п. Сюда же включаются погрешности задания траектории, возникающие, например, из-за неточного определения или округления координат точек пути. 4. Погрешность пилотирования (FTE, Flight Technical Error). Это расстояние между местоположением ВС, которое пилот видит на индикаторе, и заданным местоположением (ЛЗП) на этом же индикаторе. Это единственная составляющая TSE, которую экипаж может непосредственно наблюдать. По продольной координате (вдоль ЛЗП) TSE представляет собой разность между отображенным на индикаторе расстоянием ВС до точки-пути и фактическим расстоянием до этой точки. Она включает в себя почти те же составляющие, что и по боковой координате, - погрешности навигационной системы, вычисления данных и индикации. Отсутствует лишь погрешность пилотирования. Ведь поскольку нет заданного местоположения по продольной координате в данный момент времени, то нельзя и определить отклонение от него. Но, конечно, ситуация изменится с введением TNAV; Тип RNP обозначается числом, которое представляет собой выраженную в морских милях так называемую величину удерживания (containment value), определяющую допустимые отклонения. Понятно, что поскольку все составляющие TSE являются случайными, невозможно требовать стопроцентного выдерживания коридора шириной плюс-минус величину удерживания. Поэтому сущность предъявляемых конкретным типом RNP требований к точности навигации заключается в том, что в течение 95% полетного времени на любом участке одного попета TSE не должна превышать величину удерживания в каждом измерении (и по боковой, и по продольной координатам). Иначе говоря, численное значение типа RNP обозначает допустимую TSE, выраженную для горизонтальной навигации (LNAV) в морских милях. Например, для RNP 4 линейное боковое уклонение от ЛЗП, а также погрешность отображения оставшегося расстояния до точки пути не должны превышать 4 м. мили в течение не менее 95% времени полета. Здесь число 4 является величиной удерживания и обозначает тип RNP. Значение «95% времени», соответствующее вероятности нахождения ВС в пределах коридора, равной 0,95, выбрано потому, что для многих видов законов распределения случайных погрешностей (в частности, для нормального закона и за- 20 кона Лапласа) это значение вероятности примерно соответствует удвоенной средней квадратической погрешности («сигме»). Это означает, что, например, для RNP 4 средняя квадратическая погрешность выдерживания ЛЗП должна составлять 2 м. мили. Если бы было выбрано другое значение вероятности, пришлось бы оговаривать еще и вид распределения. Необходимо отметить, что ранее, в первом издании Руководства [1], величина удерживания рассматривалась как допустимая радиальная погрешность - расстояние между фактическим и заданным местоположением ВС. Но это оказалось неудобным пр/ оценке точности навигации в отдельности по каждой координате, тем более, что и составляющие погрешности по разным координатам несколько различаются. К тому же, «заданного местоположения» вовсе не существует, если не задана пространственно-временная траектория полета. «Руководство по требуемым навигационным характеристикам RNP», разработанное ИКАО, пока еще, в данном издании, не формулирует требований к точности по высоте и времени, не устанавливает для них классификацию типов RNP. Но, как будет показано ниже, такие требования уже устанавливаются другими международными организациями. С практической точки зрения важно знать допускаемую погрешность пилотирования (FTE). Иногда в литературе, пользуясь дословным, но не точным! переводом с английского, ее называют погрешностью техники пилотирования Это может вызвать неправильные ассоциации, поскольку техникой пилотирования обычно называют совокупность приемов управления самолетом, искусство пилота. В данном же случае FTE характеризует не мастерство отдельного пилота или отклонение от принятой «техники пилотирования», а просто те возможности, которые обеспечивает данный способ управления ВС, то есть пилотирования. Как уже отмечалось, FTE характеризует отклонения индицируемого местоположения ВС, возникающие при различных способах управления самолетом - ручном (штурвальном), директорном или автоматическом, - от также отображаемой на приборах заданной траектории полета. В документе [1] приводится таблица предполагаемых значений FTE для LNAV, которые используются при анализе составляющих TSE (табл. 1.1). Таблица 1.1 Предполагаемые значения FTE (при вероятности 95%) Этап полета Океанические маршруты (треки) Континентальные маршруты TМA (вылет и прибытие) Заход на посадку Режим управления: ручной директорный автоматический м. мили км м. мили км м. мили км 2.0 3.7 0.5 0.93 0.25 0.463 1.0 1.85 0.5 0.93 0.25 0.463 1.0 1.85 0.5 0.93 0.25 0.463 0.5 0.93 0.25 0.463 0.125 0.231 1.4. Типы RNP Типы RNP подразделяются на маршрутные, аэроузловые и аэродромные. ИКАО определила в качестве основных (стандартных) типы RNP, которые представлены в табл. 1.2, приведенной в [1]. Тип RNP1 предусматривается для обеспечения наиболее эффективных полетов по маршрутам ОВД и в аэроузловой зоне при использовании наиболее точной информации о месте ВС, а также для применения методов зональной навигации, позволяющих получить наибольшую гибкость при организации и изменении маршрутов осуществлении в режиме реального времени необходимых корректировок в со- 21 ответствии с потребностями структуры воздушного пространства. Этот тип RNP предусматривает наиболее эффективное обеспечение полетов, использование Правил полетов и организации воздушного пространства при переходе от полета в районе аэродрома к полету по маршруту ОВД и в обратном порядке, т.е. при выполнении SID и STAR. Таблица 1.2 Маршрутные типы RNP Величина удерживания в морских милях в километрах 1 ±1 ±1.85 Тип RNP 4 10 12.6 ±4 ±10 ±12.6 ±7.4 ±18.5 ±23.3 20 ±20 ±37.0 Тип RNP4 предназначается для маршрутов ОВД, основанных на ограниченном расстоянии между навигационными средствами. Этот тип RNP обычно используется в воздушном пространстве, расположенном над континентом. Устанавливая им точность аэронавигации соответствует требуемой точности на обычных маршрутах, задаваемых VOR, которая использовалась и до введения концепции RNP. Тип PNP10 предусматривается для сокращения минимумов бокового и продольного эшелонирования. Он повышает эксплуатационную эффективность в океаническом воздушном пространстве и районах, где возможности использования наземных навигационных средств ограничены. Тип RNP12.6 обеспечивает ограниченную оптимизацию маршрутов в районах с пониженным уровнем обеспечения навигационными средствами. Численное значение величины удерживания соответствует удвоенной средней квадратической погрешности определения места ВС, являющейся одним из параметров MNPS в Северной Атлантике. Тип RNP20 характеризует минимальные возможности по точности определения МВС, которые считаются приемлемыми для обеспечения полетов по маршрутам ОВД любым ВС в любом контролируемом воздушном пространстве в любое время. Он как бы соответствует такой плохой точности, что еще меньшую требуемую точность нет смысла устанавливать. Широко используются и нестандартные типы, то есть не перечисленные в [1]. В районах выполнения полетов воздушными судами, точность навигации которых превышает требования RNP4 и в которых для контроля воздушного движения используются средства независимого радиолокационного наблюдения, может использоваться ширина коридора ±5 км (±2.7 м. миль), т.е. значение типа RNP 2.7. Следует отметить, что в СССР данное значение ширины коридора ± 5 км в Московской воздушной зоне и некоторых других аэродромных зонах было установлено еще до введения концепции RNP. В США для полетов по трассам также применяется нестандартный тип RNP 2. Типы RNP, применяемые для захода на посадку, будут рассмотрены в п. 1.9. Тип RNP1 должен вводится поэтапно в связи с тем, что некоторым эксплуатантам придется вложить средства в новое оборудование. Такое положение явилось основой для введения P-RNAV в Европе как промежуточного шага на пути к RNP 1. Зональная навигация вводится в том или ином регионе одновременно с установлением определенного типа RNP. Если этот тип является нестандартным либо функциональные требования к RNAV чем-то отличаются от приведенных в [1], то такая зональная навигация может получить собственное название, например, B-RNAV, B-RNAV+, B-RNAV++, P-RNAV и т.п. 22 1.5. Требования к воздушному пространству RNP определяют характеристики навигации в определенном воздушном пространстве и влияют как на организацию самого воздушного пространства, так и на воздушное судно. Типы RNP, методы и оборудование RNAV в разных регионах мира внедряются единообразно и согласовано. Для этого в региональных отделениях ИКАО и государствах созданы соответствующие группы экспертов и уполномоченных специалистов. Эксплуатанты взаимодействуют с ними по вопросам оборудования ВС, подготовки экипажей и освоения эксплуатационных процедур RNAV. Типы RNP для определенных районов, объемов воздушного пространства в определенном диапазоне высот, для маршрутов или процедур в районе аэродрома устанавливаются либо соответствующим государством, либо региональным аэронавигационным соглашением. Конкретный тип RNP вводится в зависимости от ряда факторов: инфраструктуры средств связи, наличия наземных радиомаяков и радиолокационного наблюдения, насыщенности воздушного пространства, характера местности, расположения препятствий, особых зон и др. RNP могут применяться с момента взлета и до посадки. При этом на различных этапах попета могут применяться различные типы RNP. Как правило, для захода на посадку и ухода на второй круг применяются «строгие» RNP, для вылета и прибытия -- более «мягкие», а на маршруте – совсем «мягкие» RNP с минимальным набором функциональных требований. В АИП государств описываются характеристики и требования к воздушному пространству при применении RNP на маршрутах или в определенных районах и публикуются фиксированные, резервные маршруты и районы применения RNP. Фиксированный маршрут RNP - постоянный опубпикованный маршрут RNP с возможными ограничениями по времени использования и высотам пролета. Маршрут начинается и заканчивается пунктами донесения. Вдоль маршрута устанавливаются точки пути. Резервный маршрут RNP - опубликованный маршрут ограниченного по времени применения (часы, дни, сезоны). Район RNP - некоторый район, объем воздушного пространства или любое воздушное пространство установленных размеров, где применяется RNP. В таких районах может планироваться и выполняться полет по произвольным линиям пути в течение установленных периодов времени и/или в пределах указанных диапазонов эшелонов полета. Для увеличения пропускной способности воздушного пространства органы ОВД могут давать указание о выполнении полета со смещением относительно фиксированного маршрута и таким образом использовать RNAV как инструмент ОВД. В свою очередь летный экипаж должен уведомлять орган ОВД об аварийной ситуации (отказ оборудования, неблагоприятные метеоусловия), которая влияет на возможность обеспечения точности навигации, а также сообщить о своих намерениях, согласовать план действий и получить измененное диспетчерское разрешение. 16. Требования к воздушным судам и членам летного экипажа Воздушные суда, сертифицированные по менее строгим типам RNP, не будут допускаться в воздушное пространство с более строгими типами RNP. Воздушные суда, сертифицированные по более строгим типам RNP, могут без ограничений летать в воздушном пространстве с менее строгими типами RNP, за ис- 23 ключением случаев, когда тип используемой навигационной системы не соответствует требованиям выполнения полета в данном районе. Например, сертифицированное по RNP1 оборудование RNAV, работающее в режиме VOR/DME или DME/DME, не может использоваться для полета в Северной Атлантике с RNP12.6, поскольку в океане такие маяки отсутствуют. Кроме самого значения типа RNP, как правило, оговаривается конкретный тип оборудования или датчиков, которые должны применяться в обеспечении этого типа RNP. Эксплуатационные и функциональные требования к оборудованию RNAV обязательны для всех ВС, выполняющих полеты в пространстве с установленным типом RNP. Оборудование каждого ВС может быть значительно лучше и эффективней, чем это предписано, но в целом оно должно соответствовать минимальным требованиям. предписанным в [1], либо региональными или государственными документами, в которых определены не менее жесткие требования, чем в [1]. Воздушное судно должен быть оборудовано сертифицированной системой RNAV, соответствующей требованиям одного или нескольких типов RNP. Как уже упоминалось, к простейшим системам RNAV относятся вычислительные системы, использующие сигналы маяков VOR/DME или двух DME, преобразующие полярные координаты в географические и решающие простые навигационные задачи. Основной их недостаток - ограниченная зона действия и невысокая точность, связанная с возможностями маяков VOR. К системам, использующим внешние навигационные средства, относятся бортовые приемники GNSS. Основное их преимущество - глобальная зона действия и высокая точность. Недостаток - слабая помехозащищенность и связанная с этим недостаточная непрерывность обслуживания. Иными словами, высокая вероятность потери сигналов спутников в связи с промышленными или искусственными помехами. К автономным системам RNAV относятся инерциальные системы (ИНС), которые определяют крен, тангаж, истинный курс, географическое место (включая геометрическую высоту) и вектор скорости ВС. Основное преимущество ИНС - полная автономность. Основные недостатки дороговизна и сложность, требующая корректной эксплуатации, а также уже отмечавшееся снижение точности работы с течением времени и, как следствие, необходимость коррекции счисленных координат. К комплексным (мультисенсорным) системам RNAV относятся FMS. FMS обобщенное название бортовых систем управления полетом, включающих в себя бортовые датчики, приемники, вычислители, базы навигационных данных и данных о характеристиках ВС. FMS выдает данные о положении ВС и команды на управление траекторией полета на дисплеи и в автопилот (систему траекторного управления). Некоторые FMS контролируют и регулируют расход топлива, управляя режимами работы двигателей и решают задачи оптимизации полета по различным критериям. Иными словами, пользуясь отечественной терминологией, FMS выпопняет функции навигационного комплекса с возможностью оптимизации полета. С позиции навигации, FMS обладает меньшими недостатками по сравнению с другим навигационным оборудованием по определению места ВС, в то же время стоимость FMS может составлять до 25% стоимости небольшого ВС, и, кроме того, следует учитывать дороговизну баз данных FMS - Nav Data Base. Мультисенсорный принцип FMS обеспечивает необходимую точность и надежность навигации на всех этапах полета. Однако следует помнить, что безопасность навигации с использованием FMS обеспечивается строгой эксплуатационной дисциплиной (соблюдением стандартных эксплуатационных процедур – SOPs) и качеством используемой базы данных. 24 В качестве примера в Приложении приведены нормативные требования, предъявляемые к ВС для полетов в условиях P-RNAV, Безопасная и точная зональная навигация невозможна без обеспечения необходимого уровня подготовки членов летного экипажа. Полномочные органы государства в области авиации несут ответственность за обеспечение надлежащей подготовки как летных экипажей, так и диспетчеров ОВД к производству полетов в условиях RNP. Они должны предусматривать проведение семинаров по RNP в целях содействия их внедрению в пределах государства или региона. Программы подготовки членов летных экипажей включаются в часть D Руководства по производству полетов эксплуатанта и в соответствующие документы учебных центров. Следует убедиться в том, что в результате подготовки члены летных экипажей: - имеют общие понятия о применении RNP; - имеют четкое представление об оборудовании, включая его ограничения; - ознакомились с эксплуатационными правилами и процедурами; - осознают необходимость уведомлять органы ОВД о тех случаях, когда точность навигационного оборудования вызывает сомнения; - знают порядок действий в чрезвычайной обстановке. Требования нормативных документов к подготовке членов летных экипажей приведены в Приложении. 1.7. Базовая зональная навигация Базовая или основная (Basic) зональная навигация (B-RNAV) была введена по инициативе Евроконтроля в регионе Западной Европы 29 января 1998 г. Требования к точности навигации соответствуют RNP 5, то есть ВС должно в течение 95% времени попета находиться в пределах ± 5 м. миль от линии заданного пути. Евроконтролем определены некоторые функциональные и эксплуатационные требования к оборудованию B-RNAV. Для достижения RNP5 возможно использование различных датчиков навигационной информации, а именно: - двух маяков DME (режим DME/DME); - одного маяка VOR/DME, расположенного не далее 62 м. миль от ВС; - одной инерциальной системы с коррекцией по радионавигационной или спутниковым системам: - одного приемника GPS. соответствующего требованиям, представленным в [10, 17]. Введение B-RNAV позволило обеспечить использование имеющегося навигационного оборудования без изменения существующей структуры маршрутов ОВД в регионе Западной Европы. Опыт выполнения полетов в регионе действия B-RNAV показал, что процесс навигации существенно упростился, а точность повысилась. 1.8. Точная зональная навигация К точной (Precision) зональной навигации (P-RNAV) относится зональная навигация, в которой действуют требования к точности, соответствующие типу RNP1, и некоторые функциональные требования к оборудованию RNAV, но при этом не требуется соблюдение всех остальных "классических" аспектов RNP согласно [1]. Применение P-RNAV обусловлено возможностью повышения точности навигации, а, следовательно, и пропускной способности воздушного пространства в аэроузловых зонах (ТМА) с интенсивным воздушным движением. 25 В документе [2] определен целый набор функциональных и эксплуатационных требований к оборудованию P-RNAV и бортовой базе аэронавигационных данных. Для достижения требуемой для P-RNAV точности возможно использование следующих типов датчиков навигационных сигналов: - GPS без каких либо функциональных дополнений; - двух DME или одного VOR/DME, расположенных в определенных местах ТМА. Использование инерциальных систем возможно только в течение нескольких минут после взлета или очередной коррекции по VOR/DME, DME/DME или GPS. В основном ИНС выполняет роль инерциальной поддержки оборудования RNAV для повышения ее готовности и непрерывности обслуживания. Но эти важные характеристики классических RNP для Европейской P-RNAV не являются обязательными, и это является главным отличием P-RNAV от RNP1. Поэтому решающего значения для сертификации оборудования по P-RNAV его инерциальная составляющая не имеет. При введении в ТМА процедур P-RNAV авиационные власти государств и соответствующие службы ОрВД (ASM) должны гарантировать, что: 1) все процедуры P-RNAV в этой ТМА: – не противоречат техническим положениям ИКАО, представленным в Doc. 8168 [12]; – разработаны в соответствии с обязательными требованиями Евроконтроля [131; – учитывают функциональные и технические характеристики систем P-RNAV, предписанные в документе [13]; – учитывают, что использование вертикальной навигации VNAV для P-RNAV не является обязательным и что возможно использование обычных методов вертикального наведения; – опубликованы так, что на схемах процедур P-RNAV указаны радианы, пеленги и дальности от наземных маяков до точек пути, используемых в процедурах, чтобы летный экипаж мог дополнительно контролировать пролет этих точек по наземным РТС, 2) все точки пути траектории P-RNAV заданы в системе координат WGS-84; 3) полномочный орган ОрВД (ASM) подтвердил, что построение процедуры и навигационная инфраструктура (наземные РТС) обеспечивают ее адекватное выполнение на всех участках. При этом учитываются летно-технические характеристики категорий ВС, для которых эта процедура предназначена. Иногда такие процедуры облетываются на специальном самолете с участием уполномоченных лиц ОрЕЗД; 4) если процедура позволяет выбирать источник навигационного сигнала (например, GNSS, DME/DME или VOR/DME), то применяются критерии учета препятствий для таких средств, которые обеспечивают наихудшую точность навигации; 5) включены в АИП и указаны на применяемых картах навигационные средства, обязательные для использования при выполнении данной процедуры, а также средства, которые не должны использоваться летным экипажем в системе RNAV (наиболее часто это касается маяков VOR/DME); 6) осуществляется мониторинг навигационных сигналов GNSS, DME, VOR, требуемых для выполнения данной процедуры. Если какая-либо система определена как обязательная для использования, а она не работает, то выпускается соответствующий NОТАМ; 7) для процедур, предполагающих использование в качестве датчика только систему GNSS, учитывается риск потери сигналов спутников или прерывания RAIM, а, следовательно, и потери статуса P-RNAV сразу у группы ВС. Как правило, такой 26 риск компенсируется установкой одного маяка DME или VOR/DME для поддержки всех процедур P-RNAV в этой ТМА; 8) для избежания серьезной опасности в случае отказа оборудования P-RNAV при полете по траекториям, которые пролегают ниже применяемой MSA, или когда не обеспечен радиолокационный контроль полета, в АИП внесено требование о необходимости иметь на борту двойной комплект оборудования P-RNAV. В некоторых случаях авиационным властям потребуется изменить воздушное законодательство для того, чтобы придать юридическую силу заключениям специалистов ОрВД о необходимости иметь два комплекта оборудования P-RNAV, 9) если радиолокатор определен как средство, применяемое диспетчером в нештатных ситуациях (например, при отказе бортового оборудования RNAV), его технические характеристики подтверждены полномочными органами, а требование о радиолокационном обслуживании предписано в АИП; 10) в АИП опубликована фразеология "пилот-диспетчер", применяемая при выполнении полетов P-RNAV; 11) навигационные средства, не соответствующие Приложению 10 ИКАО [17] (например, TACAN), исключены из АИП. 1.9. Зональная навигация с установленными типами RNP 1.9.1. Концепция удерживания ИКАО является не единственной международной организацией, занимающейся вопросами установления и выполнения требований к точности аэронавигации, внедрения в авиационную практику научных разработок и передового опыта обеспечения безопасности полетов. Занимаются этим EUROCONTROL, RTCA и ряд других организаций. Важный вклад в развитие концепций RNAV и RNP вносит RTCA (Radio Technical Commission for Aeronautical - Радиотехническая комиссия по аэронавтике). Это некоммерческая международная организация, членами которой являются авиакомпании, государственные ведомства разных стран, производители авионики и поставщики аэронавигационной информации. Образованные RTCA комиссии ведут работу по различным направлениям деятельности и выпускают документы, которые обобщают мировой опыт в обпасти авиации, учитывают перспективы и тенденции ее развития. Рекомендации RTCA, хотя и именуются стандартами, формально не имеют статуса международного или национального стандарта. Но их часто берут за основу правительственные органы разных стран для создания своих национальных стандартов (например, TSO - Technical Standard Order, принятые в США). В то время как членами ИКАО являются государства в лице их официальных представителей, в работе комиссий RTCA участвуют непосредственно участники практической авиационной деятельности (инженеры, летчики, ученые и т.д.) - все заинтересованные стороны. Вследствие этого документы RTCA более близки к потребностям сегодняшней практики, являются более оперативными, а иногда и более глубокими. Как правило, со временем основные положения документов RTCA проникают и в документы ИКАО. Важной составляющей CNS/ATM, необходимой для эффективного функционирования авиационной транспортной системы, является обеспечение точной аэронавигации ВС. Требуемая точность полета обеспечивается с помощью навигационных систем, Но эти системы должны быть не только точными, но и надежными, обеспечивать необходимую непрерывность обслуживания, обладать целым рядом других качеств. В связи с этим одна из комиссий RTCA разработала минимальные стандарты, на характеристики авиационных систем (MASPS), необходимые для зональ- 27 ной навигации в условиях RNP. Эти стандарты содержатся в документе [19]. Они дополняют и расширяют требования Руководства [1] таким образом, чтобы бортовые навигационные системы обеспечивали выполнение требований будущей системы CNS/ATM. Чтобы отличать расширенные требования RTCA от обычных требований RNP, приведенных в Руководстве [1], для них введено обозначение RNP RNAV. Поэтому, если ВС удовлетворяет требованиям RNP RNAV, то оно удовлетворяет и требованиям RNP такого же типа. Обратное, конечно, вовсе не обязательно. Новыми элементами в RNP RNAV являются введение концепции удерживания (Containment Concept), а также установление требований к точности зональной навигации по высоте (VNAV) и времени. Рассмотрим эти понятия несколько более подробно. В соответствии с [1] требования к точности предъявляются в виде RNP, установленных в том или ином регионе, и определяются величиной удерживания (containment value) Как уже отмечалось, это половина ширины коридора, в пределах которого ВС должно находиться не менее 95% времени полета. В концепции RNP RNAV дополнительно вводятся понятия предела удерживания, района удерживания, целостности удерживания, непрерывности удерживания. Применительно к боковой координате предел удерживания (containment limit) устанавливается равным удвоенному значению величины удерживания, соответствующей типу RNP. Например, для RNP4 предел удерживания составит 8 м. миль, поэтому не следует путать эти две величины с похожими названиями. Если величина удерживания соответствует двум «сигмам», то предел удерживания - четырем. Коридор шириной плюс-минус предел удерживания относительно ЛЗП является районом удерживания (containment region) применительно к боковой координате. Аналогично вводится понятие района удерживания в горизонтальной плоскости (в виде окружности) и по вертикали, образуя, таким образом, сферу. С помощью предела удерживания (обозначим его величину для удобства через С) вводятся два новых важных понятия - целостность и непрерывность удерживания. Целостность удерживания (containment integrity) - мера уверенности в оцененном системой местоположении ВС, выраженная как вероятность того, что навигационная система выявит и предупредит о ситуации, при которой общая погрешность системы (TSE) превышает предел удерживания (С), Необходимо сделать несколько замечаний в отношении терминов, использованных в данном определении. Сам термин «целостность», который уже широко используется применительно не только к навигационным системам, но и к аэронавигационным данным, является не вполне удачным переводом английского термина «integrity». Одно из значений у него действительно «целостность, неразделенность на части», но применительно к данному контексту более адекватными являются другие оттенки его значения, отражающие такие свойства как «честность, справедливость, порядочность» и т.д. То есть «integrity» - это свойство навигационной системы давать правильную, достоверную информацию. И никакого отношения к целостности как неразделенности на части, «неразрушенности» системы оно не имеет. В приведенном определении под «оцененным» (estimated) системой местоположением ВС понимаются координаты либо непосредственно измеренные датчиками (VOR/DME, GNSS и т.п.), либо полученные путем комплексной обработки информации от нескольких датчиков, прошедшие алгоритмы контроля достоверности и фильтрации. В последнем случае, благодаря избыточности информации, удается не только отсеять недостоверные данные (например, от отказавшего датчика), но также повысить точность определения местоположения и, что особенно важно, оценить степень этой точности, предупредить летный экипаж, если она не соответствует требуемой. 28 Целостность системы обеспечена, если выполнено одно из следующих усло- вий: - уклонение ВС меньше предела удерживания (TSE<C); - при уклонении ВС на величину большую предела удерживания (TSE>C) система выдает об этом предупреждение летному экипажу. Поскольку используемая системой информация содержит случайные погрешности, выявить отклонение со стопроцентной надежностью невозможно. Поэтому целостность удерживания целесообразно измерять вероятностью этого события, отнесенной к часу полета. Но эта вероятность очень близка к единице, записывать ее с большим количеством девяток (например, Р=0,99999) неудобно, поэтому на практике используют вероятность противоположного события, характеризующего нарушение целостности, то есть 1 - Р. Таким образом, целостность удерживания характеризуют вероятностью того, что в течение часа полета произойдет уклонение за предел удерживания (TSE>C), а система не выдаст предупреждение летному экипажу о таком уклонении. То есть имеется в виду вероятность того, что произошли одновременно два события: ВС уклонилось, а система этого не выявила. Чем эта вероятность меньше, тем система лучше (целостность выше). RTCA определила, что данная вероятность должна быть не больше 10 -5, то есть 1/100000. Необходимо правильно понимать, что эта навигационная характеристика (целостность удерживания) касается не только самого уклонения ВС за предел удерживания С, но и способности системы выявить это отклонение, если оно произойдет. Иными словами, если ВС летит настолько неточно, что все время уклоняется за предел С, но система каждый раз информирует об этом летный экипаж, то целостность обеспечена. Но при этом, конечно, не будет обеспечена 95-процентная продолжительность полета в границах величины удерживания. В то же время, гипотетически можно представить себе такую слишком «бдительную» навигационную систему, которая очень часто предупреждает экипаж об уклонении за предел С. Неважно почему - то ли уклонение действительно имеет место, то ли происходит ложное срабатывание этой системы. Сюда же относят случай, когда система вообще не может определить местоположение или из-за ее полного отказа, что обычно легко выявляется летным экипажем, или из-за нахождения ВС вне зоны действия наземных радиомаяков или спутников, о чем, как правило, предупреждает сама система. Чтобы ограничить вероятность такого события вводится еще одна характеристика - непрерывность удерживания. Непрерывность удерживания (containment continuity) - это способность системы удовлетворять требованиям целостности удерживания без непредусмотренных перерывов (nonscheduled interruptions). Под такими «непредусмотренными перерывами» понимается одна из следующих ситуаций: - полная потеря системой навигационной способности (ее отказ); - частичная потеря навигационной способности, при которой система ее выявила и информирует летный экипаж, что она не может обеспечить выполнение требований RNP RNAV; - ложное информирование летного экипажа о неспособности системы обеспечить выполнение требований RNP RNAV. Иными словами, непрерывность удерживания нарушена, если система предупредила об уклонении за предел С (неважно, действительно это уклонение произошло или нет) либо вообще не может определить местоположение. RTCA установила, что вероятность возникновения такой ситуации за час полета не должна превышать 10-4, то есть 1/10000, - это и есть мера непрерывности удерживания. Таким образом, совместно Руководство по RNP [1] и MASPS [19] определяют следующие навигационные характеристики для LNAV: 29 – величину удерживания, нормирующую отклонения ВС от ЛЗП (95% времени полета в пределах этой величины); – предел удерживания (удвоенная величина удерживания); – целостность удерживания, ограничивающую вероятность необнаруженного системой уклонения за предел удерживания (не более 10 -5); – непрерывность удерживания, ограничивающую вероятность выдачи сообщения (правильного или ложного) об уклонении за предел удерживания или функционального отказа системы (не более 10 -4). Для вертикальной навигации (VNAV) документом [19] впервые вводятся характеристики требуемой точности. Они касаются только этапов горизонтального полета и снижения. Траектории набора высоты в документе пока не рассматриваются, поскольку они слишком различаются для разных типов ВС. Устанавливается предел отклонения по вертикали VPPL (Vertical Path Performance Limit). Его значение составляет от 150 до 260 футов и зависит от диапазона высот, в котором выполняется полет (чем больше высота, тем больше VPPL), и от того, выполняется горизонтальный полет или снижение. VPPL в некотором смысле аналогичен величине удерживания, применяемой для боковой координаты. Но применительно к вертикальной плоскости этот предел не должен быть нарушен на протяжении не менее 99,7% времени полета. Это значение говорит о том, что при нормальном распределении погрешностей VPPL равен утроенной средней квадратическjй погрешности выдерживания высоты. Требования целостности и непрерывности удерживания для VNAV не устанавливаются, но вероятность невыявленной системой потери навигационной способности VNAV должна быть не менее 10 -3. Нормируются в RNP RNAV и погрешности продольной навигации (по времени). Погрешность расчета времени пролета пункта не должна превышать 1% оставшегося времени полета до него. Если же система имеет функцию управления временем прилета в пункт (ТОАС - Time of Arrival Control), то в 95% случаев погрешность не должна превышать 30 с. Вышеизложенные требования к навигационным системам, содержащиеся в [19 ], сражают точку зрения мирового сообщества в лице RTCA на проблему обеспечения точности навигации в условиях RNP RNAV. 1.9.2. Характеристика требований RNP RNAV Разумеется, работа по развитию концепции RNP RNAV ведется не только RTCA, но и ИКАО. Одна группа экспертов ИКАО по пролету препятствий (ОСР) разрабатывает критерии для процедур RNP RNAV, а другая группа по вопросам эшелонирования (RGCSP) - критерии по эшелонированию полетов RNP RNAV [4]. По результатам работы этих групп разработаны критерии построения схем захода на посадку для RNP0.3 и интервалы эшелонирования на маршрутах с RNP4. Для обеспечения точных заходов и посадок с использованием RNAV точность навигации в вертикальном плане тоже должна быть включена в RNP. В результате спектр типов R.NP для захода на посадку стал занимать диапазон от RNP1 до RNP 0.003/Z, где число Z. выражает требование к точности вертикального наведения, выраженное в футах. Планируемые типы RNP для захода на посадку представлены в табл. 1.3. Сертификацию по RNP1 имеют навигационные системы (FMS), которые зарубежная промышленность начала производить с 1990 г. 30 Воздушные суда выпуска 1998 г. и позднее могут претендовать на сертификацию по RNP0.03/125 и даже ниже. Однако пока отсутствуют процедуры такой сертификации. Первые публикации процедур RNP RNAV в Европе ожидаются не ранее 2005 г., а обязательной такая навигация станет с 2010 г. RNP задаются требованиями четырех основных параметров: 1) точность RNAV; 2) обеспечение целостности навигации при использовании оборудования RNAV; 3) готовность оборудования RNAV для навигации; 4) непрерывность навигации при использовании оборудования RNAV. Таблица 1.3 Планируемые типы RNP для захода на посадку Тип RNP Требуемая точность(95% вероятность), м. миля/фут 0.003/z ± 0.003/ z 0.01/15 ± 0.01/15 0.02/40 ± 0.02/40 0.03/50 ± 0.03/50 0.3/125 ± 0.3/125 0.3 ± 0.3 0.5 ± 0.5 1 ± 1.0 Описание Для заходов на посадку, посадок, торможения, руления по CAT III: ILS, MLS и GNSS/GBAS Для заходов на посадку по CAT II с ВПР до 30 м: ILS. MLS и GNSS/GBAS Для заходов на посадку по CAT I с ВПР до 60 м: ILS, MLS и GNSS/GBAS или SBAS Для заходов на посадку RNAV/VNAV с поддержкой SBAS Для заходов на посадку RNAV/VNAV с поддержкой SBAS или Baro-VNAV Начальный и промежуточный участки захода, вылеты Начальный и промежуточный участки захода, вылеты. Применяет в тех случаях, когда RNP0.3 не может быть обеспечен из-за недостаточной инфраструктуры, a RNP1 не достаточно из-за высоких препятствий STAR, начальный и промежуточный участки захода на посадку, вылеты Кроме точности любой тип RNP включает критерии целостности, готовности и непрерывности обслуживания. Эти критерии имеют математические описания и выражаются численным значением. Численные значения критериев разные для маршрутов и районов аэродромов (ТМА), а что касается заходов на посадку, то учитывается еще и тип захода на посадку. При сертификации систем применяются чисто математические способы оценки всех составляющих RNP, которые не учитывают возможные ограничения на использование навигационных систем - датчиков. Поэтому на эксплуатанта возлагается обязанность самостоятельно оценивать целостность, готовность и непрерывность обслуживания перед выполнением полета, учитывая текущую информацию о состоянии навигационных систем (NOTAM по радиосредствам, специальные извещения о состоянии GPS) и применяемых специальных средств прогнозирования. Например, для оценки готовности системы GPS, как датчика оборудования RNAV, установлена процедура RAIM-прогнозирования, позволяющая определить возмож- 31 ность использования системы GPS в заданном месте в заданное время. Примеры такой оценки приведены далее. Самым “готовым" и "непрерывным" датчиком RNAV является инерциальный датчик, который готов и непрерывно работает всегда, если его включить и корректно выставить. Но у этого типа датчиков существуют проблемы с другими составляющими RNP - точность работы и целостность, особенно при длительных полетах. Проблем с точностью у датчика GPS нет, но есть проблемы с готовностью и непрерывностью обслуживания. По этой причине для полетов по приборам с использованием GPS обязательно надо иметь как минимум RAIM (лучше FDE), а для заходов на посадку в сложных метеоусловиях - системы функционального дополнения WAAS/LAAS, которые кроме повышения точности, доводят характеристики готовности и непрерывности обслуживания до установленных соответствующим RNP значений. Основные особенности B-RNAV и P-RNAV заключаются в том, что, кроме показателя точности в 5 и 1 м. Милю, из всего набора характеристик RNP оговариваются как обязательные только некоторые из них. Основных цифры целостности, готовности и непрерывности, обязательных для RNP-RNAV, достигать не требуется, поскольку безопасность применения зональной навигации B-RNAV и P-RNAV обеспечивается развитой инфраструктурой ОВД и возможностью экипажа использовать обычные навигационные средства при отказе системы RNAV. Что касается безопасности заходов на посадку в режиме RNAV, например по GPS, то, как дополнительная мера безопасности, применяется требование иметь запасной аэродром с обычными средствами захода - ILS, VOR, DME. Особенностью RNP-RNAV является то, что необходимо соблюдать все требования установленного типа RNP не только по точности, но и по целостности, готовности и непрерывности обслуживания. Основная цель введения RNP - обеспечение ОВД в каком либо районе воздушного пространства. RNP устанавливаются государствами в зависимости от интенсивности воздушного движения, сложности маршрутов полетов и с учетом всей инфраструктуры CNS. В районах и на маршрутах RNP органы ОВД обязаны следить за точностью навигации и, при необходимости, корректировать траекторию полета ВС. Поэтому невозможно вводить строгие RNP в районах, где не обеспечено адекватное наблюдение за воздушной обстановкой и качественная связь с воздушным судном. Развитие систем связи, наблюдения, средств стратегического и оперативного планирования полетов должно опережать темпы введения строгих RNP, что прослеживается в Европе. В этой связи эксплуатанты должны направлять усилия не только на повышение точности навигации, но и на модернизацию всего комплекса оборудования ВС для того, чтобы вписаться в опережающее развитие систем связи и наблюдения. Эксплуатант не получит разрешение на полеты в районах будущих RNP, не имея требуемых в этих районах систем связи и наблюдения. Для производства полетов в условиях RNP в п. 6.1.18 документа [1] говорится, что используемое навигационное оборудование выбирается эксплуатантом. Основное условие заключается в том, чтобы это оборудование обеспечивало уровень точности выдерживания навигационных характеристик, установленный для каждого конкретного типа RNP. При этом необходимо учитывать следующие аспекты: 1) эксплуатанты должны получить соответствующее разрешение от своих государств; 2) до получения разрешения эксплуатант должен представить государственному органу ГА подтверждение того, что данный тип оборудования соответствует установленным требованиям; 32 3) эксплуатант вносит в эксплуатационную документацию (РЛЭ ВС, РТО, РПП, РК и т.д.) ограничения и условия, навигационные процедуры для штатных и нештатных ситуаций, прописывает правила обновления баз данных, технического обслуживания, утверждает программы и проводит подготовку летного и технического персонала; 4) государствам следует установить соответствующие административные процедуры с тем, чтобы исключить перегруженность своих служб выдачи разрешений и свести к минимуму расходы эксплуатантов. 1.10. Эксплуатационные характеристики GNSS, как одного из основных датчиков RNP-RNAV Точность, Требования к характеристикам GNSS определены с учетом различных типов RNP, в том числе для выполнения двух типов захода на посадку и посадки с наведением по вертикали: RNP 0.3/125 (AVP-I) и RNP 0.03/50 (AVP-II). Очень важной эксплуатационной характеристикой GNSS, как основного датчика RNP-RNAV, является точность. В данном контексте точность характеризуется погрешностью определения местоположения с помощью GNSS. Для целей аэронавигации принято указывать величину погрешности, соответствующую 95-процентной вероятности, то есть равную удвоенной средней квадратической погрешности (две «сигмы»). Собственная точность космического сегмента систем GPS и ГЛОНАСС меняется во времени. Орбитальное движение спутников, возмущения атмосферы и многие другие факторы приводят к появлению ошибок определения местоположения, значения которых могут меняться на интервале в несколько часов. Поэтому точность навигационных источников GPS и ГЛОНАСС определяется как две «сигмы» для каждого конкретного измерения, а не на заданном интервале времени измерений. Величина критерия снижения точности местоположения (PDOP) зависит от геометрического фактора, т.е. углов пересечений линий положений. Как правило, PDOP колеблется от 0.8 до 10. Считается, что при PDOP≤6 обеспечивается высокая точность определения позиции ВС. Используя сведения из альманаха, компьютер в аппаратуре потребителя непрерывно вычисляет критерий PDOP, определяя лучшую четверку из всех видимых спутников для определения местоположения. В табл. 1.4 приведены точности навигационных источников GPS и ГЛОНАСС при их использовании без функциональных дополнений WAAS/LAAS [20]. Таблица 1.4 Точность навигационных источников GPS и ГЛОНАСС, 2 σ (Р = 95%) Параметры Точность определения: 1) местоположения в плане, м: – стандартное обслуживание при PDOP < 6 – канала "стандартная точность" 2) по вертикали, м: – стандартное обслуживание при PDOP < 6 – канала "стандартная точность" 3) скорости, м/с GPS ГЛОНАСС ≤ 13 28 ≤77 60 0,2 0,15 Из табл. 1.4 видно, что точности GPS и ГЛОНАСС для навигации на маршруте и в районе аэродрома вполне достаточно. Но ее явно не хватает для точных заходов на посадку. Использование системы функционального дополнения WAAS/LAAS позволит довести точность до требуемых значений. 33 Целостность. Очень важным при использовании GNSS является своевременное получение информации, когда система не должна использоваться для навигации. Собственно GNSS не выдает сигналов о том, насколько достоверна информация со спутника, по которой определяются координаты ВС. Эта забота возложена на потребителя. Наличие функции бортового оборудования RAIM и более совершенной FDE позволяет обеспечить такой контроль. Кроме этого, системы функционального дополнения WAAS/LAAS будут выдавать необходимый сигнал потребителям. Готовность. В связи с тем, что во время полета возможны перерывы в приеме сигналов GPS готовность системы не может быть 100%. Правительство США гарантирует, что готовность системы GPS к использованию в любой точке земного пространства соответствует вероятности 0,95. Это приемлемо для полета по маршруту, но недопустимо мало для захода на посадку. Повысить готовность возможно с помощью комплексирования бортовых навигационных систем и/или развертыванием систем функциональных дополнений WAAS/LAAS. Непрерывность обслуживания - вероятность того, что обслуживание, предоставляемое навигационной системой, будет обеспечиваться в течение некоего этапа полета при условии, что оно обеспечивалось в его начале. В зависимости от типа захода принимаются следующие показатели: Вид захода на посадку Неточный Точный Целостность 1 – 10 -5(за час) 1- 3.5 10 -7 (на операцию) Непрерывность 1 – 10 -4 (за час) 1 - 8x10 -6 (в любые 15 с) Пример, Выражение 1 – 10 -5 в обычной записи соответствует: т.е. в течение одного часа с вероятностью 0.99999 навигационная система должна быть способной выдавать пользователю своевременное предупреждение, когда ее нельзя использовать для целей навигации. Непрерывность в обслуживании применительно к использованию GNSS состоит из готовности космического сегмента и готовности бортового оборудования. В связи с тем. что для GPS они невысоки (не выше 0,95), путь повышения готовности использования - мультисенсорные системы и/или WAAS/LAAS. В табл. 1.5 сведены требования к точности, целостности, готовности и непрерывности обслуживания GNSS, которые должны быть достигнуты при ее использовании в качестве датчика оборудования RNAV для различных типов RNP. 1.11. Три статуса бортовых навигационных систем Существует три уровня требований к бортовым навигационным системам в зависимости от того, в каком статусе они используются: самодостаточной, основной или дополнительной навигационной системы. Самодостаточнае навигационная система – система, разрешенная для данной процедуры или для данного этапа полета, которая в течение всего времени выполнения процедуры или данного этапа полета удовлетворяет всем четырем требованиям к навигационным характеристикам RNP: точности, целостности, эксплуатационной готовности и непрерывности обслуживания. 34 Примечание. Это определение не исключает наличия на борту других навигационных систем. Система, являющаяся самодостаточным навигационным средством, может иметь один датчик или несколько навигационных датчиков (мультисенсорная система). Основная навигационная система - система, одобренная для данного полета или его этапа, которая удовлетворяет требованиям точности и целостности, но может не удовлетворять требованиям по эксплуатационной готовности и непрерывности обслуживания, Безопасность ее применения достигается за счет разрешения полетов только в определенные периоды времени и при соответствующих процедурных ограничениях. Примечание. Безопасность использования основной навигационной системы обеспечивается не только процедурными ограничениями, но, очень часто, также и требованием иметь дополнительные навигационные системы, которые включаются и используются при отказе основной. Например, требования B-RNAV: приемо-индикатор СНС + приемник VOR/DME. Дополнительная навигационная система - система, которая должна использоваться в сочетании с системой, являющейся самодостаточным навигационным средством. Для получения одобрения для ее применения на данном этапе полета требуется, чтобы на борту ВС была другая система, являющаяся для рассматриваемого этапа самодостаточным навигационным средством. Дополнительная навигационная система должна удовлетворять требованиям точности и целостности во время выполнения данной процедуры или на данном этапе полета, а вопросы эксплуатационной готовности и непрерывности обслуживания при этом не рассматриваются. Примечание. Система, утвержденная как дополнительное навигационное средство с одним датчиком или мультисенсорная, во время выполнения полета при удовлетворении требований точности и целостности может быть использована без всякой перекрестной проверки (сравнения) с самодостаточным средством. Мало того, самодостаточная система может включаться и использоваться тогда, когда дополнительная система значительно снизила точность работы или имеет! признаки отказа. Самодостаточными системами могут считаться только мультисенсорные FMS, которые могут удовлетворять всем четырем критериям RNP. Правда, пока не для всех типов RNP и не на всех этапах полета. В будущей RNP-RNAV используемые навигационные системы должны быть самодостаточными. При выполнении полетов в системе B-RNAV к наиболее распространенной основной системе можно отнести приемоиндикатор (ПИ) СНС, отвечающий требованиям ТСО С129. Важным моментом использования основных систем является то, что такие понятия, как "комплексное самолетовождение", с позиции точности навигации здесь не применяются. Поскольку применение дублирующих систем, таких как, например НВУ-БЗ, ДИСС-013-134, VOR или АРК, не будут соответствовать предписанной точности навигации в районе действия RNAV. При этом в случае отказа основной системы выполняются "аварийные процедуры при отказе навигационной системы" и производятся соответствующие доклады диспетчеру ОВД. В отношении дополнительных систем можно сказать, что для России очень непривычен подход ИКАО к такому статусу навигационной системы для осуществления навигации. При полетах в воздушном пространстве России (до введения RNAV) ПИ СНС используется только как дополнительная навигационная система, а не как ос- 36 новная. В этой связи, если, например, не будет использовано штатное навигационное вычислительное устройство типа НВУ – БЗ или ДИСС-013-134, то это будет воспринято, как не комплексное использование средств навигации. Но при этом необходимо отметить, что системы типа НВУ – БЗ или ДИСС-013-134 при осуществлении навигации с применением RNP не могут быть отнесены к самодостаточным навигационным системам по той причине, что они не удовлетворяют всем четырем требованиям к навигационным характеристикам: точности, целостности, эксплуатационной готовности и непрерывности обслуживания. 1.12. Точки пути и фиксированные точки в системе RNAV ИКАО в Приложении 11 [11] и в Doc 8168 [12] определяет термин Waypoint (WPT, WP, W/P) как термин, применяемый для описания маршрутов и процедур зональной навигации. В Приложении 11 определен также термин 'significant point', используемый для описания географического положения пункта, используемого в структуре маршрутов и заданных траекториях полета. Поэтому любой WPT является одновременно и 'significant point'. Во множестве других документах ИКАО, FAA, JAA, Евроконтроля и АИПах государств WPT описывается как фиксированная точка - FIX, особенно в описании процедур захода на посадку, где в основном используются термины initial approach fix (IAF), intermediate fix (IF), final approach fix (FAF) missed approach point (MAPt) и missed approach holding fix (MAHF). Для избежания путаницы экспертами ИКАО принято решение продолжать использование терминов IAF, IF, FAF, MAPt и MAHF как в обычной, так и в зональной навигации. Такое решение принято в ноябре 2002 г. на 13 совещании экспертов ИКАО по пролету препятствий. В этой связи в документах по зональной навигации могут встретиться следующие аббревиатуры точек пути процедуры захода на посадку: IAWP - точка начала захода на посадку (IAF); IWP - точка пути промежуточного этапа захода на посадку (IF); FAWP - точка пути конечного этапа захода на посадку (FAF); MAWP - точка ухода на второй круг (MAPt); MHWP - конечная точка после ухода на второй круг с зоной ожидания (MAHF). В аэропортах Европы все WPT в районе аэродрома подразделяются на стратегические - 'strategic waypoint' и тактические - 'tactical waypoint'. Strategic waypoint - либо это очень важные для ОВД пункты, которые должны легко запоминаться и ясно отображаться на любом типе дисплея, либо это "активирующие'' пункты, при прохождении которых бортовые системы безречевой связи генерируют сообщения органу ОВД об их прохождении. Такие пункты обычно являются частью процедур SID/STAR. Tactical waypoint - пункты конкретной процедуры захода на посадку, а также промежуточные пункты процедур SID/STAR, которые не являются стратегическими и служат для стыковки участков процедуры, для тактических нужд диспетчера ОВД при организации движения в ТМА и т.д. WPT устанавливаются во всех важных точках процедуры - при изменении заданного путевого угла (ЗПУ), высоты, скорости. Однако для описания условий выполнения элемента процедуры (например, "разворот после пересечения высоты 1200 футов") WPT, как правило, не устанавливается, а в описании процедуры применяется символ "1200'+". Все географические координаты точек пути должны публиковаться в WGS-84. Конечная ответственность за их точность и целостность возлагается на государства. 37 WPT определяются с точностью не менее: -для торцов ВПП и MAPt - 0.01' (30 см); -для всех других WPT - 0.1' (3 м). В России на конец 2003 г. переход на WGS-84 не осуществлен. По правилам прохождения WP подразделяются на два типа: Fly-by и Fly-over (см. рис. 1.1). Развороты в WP выполняются при полете по маршруту с креном 20°. При разработке схем захода на посадку и вылета в соответствии с [12] предусматриваются следующие крены: - 25° при заходе на посадку; - при выполнении процедуры вылета и ухода на второй круг (Missed Approach) на схемах, основанных на RNAV - 15°, а на RNP RNAV - 20°. При разработке схем маневрирования предполагается, что время достижения заданного крена будет осуществлено в течение 6 с (3 с - реакция пилота и 3 с - время установления крена). Рис. 1.1. Разворот в точке Fly-by и Fly-over Кроме того, для схем, основанных на RNP RNAV, в точках пути Fly-by и Fly-over возможно предписание на выполнение контролируемого разворота - разворота в поле ветра с постоянным радиусом, а не с учетом спирали разворота. Спираль разворота образуется при развороте ВС под влиянием ветра, т.к. во время разворота радиус разворота относительно земли не является постоянной величиной. В некоторых случаях, исходя из конкретной структуры воздушного пространства и наличия препятствий в районе аэродрома, разработчики схем маневрирования могут использовать и иные значения кренов. В этой связи необходимо обращать внимание на предписанные значения кренов, опубликованные на картах (схемах). Необходимо отметить, что после пролета WP типа Fly-over очень часто предусматривается выход на линию пути под углом 30°. При этом линией пути является участок, соединяющий точку WP Fly-over и последующую точку пути (см. рис. 1.1). 38 Кодификаторы точек пути для одного и того же местоположения должны быть одинаковыми - на картах в АИП, в сборниках АНИ, бортовых базах данных систем RNAV и на дисплее у диспетчера. При осуществлении зональной навигации с типом RNP1: - WPT извлекается из базы данных и определяется по ее названию (если точка имеет кодификатор) или по ее географическим координатам; - разрешение и точность хранения координат WPT соответствует RNP; - в план полета может включаться не менее 10-ти WPTs. Для RNP4, 10, 12,6 и 20: - достаточно иметь азимут и дальность (А/Д) от другой WPT или использовать другие средства для ее определения (широта/долгота, А/Д от наземного маяка и т.д.); - разрешение и точность координат WPT совместима с RNP; - в план полета может включаться не менее 4 WPTs как из базы данных, так и записанных вручную. Для кодификаторов точек пути применяется стандартная система наименований WPT - 5 Letter Name Code (5LNC). Пример: ВЕВЕТ. ASUGA - стратегические WPT в ТМА и на маршруте; НК601, НК642 - тактические WPT процедур RNAV в ТМА (IAP, SID, STAR). Координаты точек пути в ТМА какого-либо аэродрома публикуются в соответствующих разделах АИП в виде таблиц в алфавитном порядке. В табл. 1.6 в качестве примера приведены данные из АИП Финляндии для аэропорта Хельсинки. Таблица 1.6 Пример списка точек пути WAYPOINTS FOR RNAV PROCEDURES ВЕВЕТ 60 14 18.92N 024 46 37.17E ESUGA 60 14 22.25N 024 44 34.96E НК601 60 14 49.79N 025 03 10.19E ………. ………………………………. НК642 60 14 48.08N 024 37 21.43E VEPES 60 27 24.00N 024 34 50.00E В настоящее время точки пути, совмещенные с наземными маяками VOR/DME/NDB, именуются в соответствии с позывными данного маяка. Как правило, это две - три буквы, которые и индицируются на дисплеях в кабине летного экипажа и диспетчера ОВД. Это не соответствует стандартной системе и со временем такие точки будут переименованы согласно 5LNC. Оборудование RNAV может создавать собственные точки, которые будут видны на дисплее, но которых нет в АИПах, на картах фирмы Jeppesen и на дисплеях диспетчеров ОВД. Эти точки называются 'computer navigation-fixes'. Они создаются при активации из базы данных "наложенных" процедур SID, STAR и GPS-OVERLAY Approach. Система их наименования всегда описывается в Руководстве пользователя оборудования RNAV. Следующий пример такой системы наименований точек в оборудовании Trimble 2000 Approach Plus: RW25L - торец ВПП 25L; MA25L -- точка ухода на второй круг, как правило за 0,5 NM от RW25L; D160F - точка на радиале 160° и удалении 6 м. миль от маяка VOR/DME; 39 CF25L точка в створе ВПП 25L, публикуется на картах фирмы Jeppesen в виде [CF25L]; FF25L - FAWP при заходе на ВПП 25L; N25НР -HWP (Holding Fix) над NDB при заходе на ВПП 25. При маневрировании по этим точкам летный экипаж не должен использовать их названия при ведении радиосвязи с диспетчером ОВД. После окончательного перехода на процедуры RNAV и изъятия из АИП и баз данных навигационных систем "наложенных" процедур типа GPS-OVERLAY Approach, потребность в 'computer navigation-fixes' отпадет, т.к. все точки будут именоваться в единой системе. Символы различных WPT, применяемые в публикациях ИКАО и АИП, даны в табл. 17. 1.13. Типы маневров RNAV в районе аэродрома 1.13.1. Указатели окончания траекторий При разработке структуры воздушного пространства с позиции заданных траекторий полета воздушных судов используются только два типа участков маршрутов: прямолинейная траектория или криволинейная между определенными точками. Использование указанных типов маршрутов позволяет: - обеспечить программирование (кодирование) заданных траекторий полета в базах данных и вычислителях оборудования RNAV; - создать надежные, повторяемые и предсказуемые траектории. Корпорацией ARINC была разработана концепция "Path Termination" (Указатель окончания траектории), которая любую процедуру при полете по маршруту в районе аэродрома (SID, STAR, IAP) разбивает на отдельные участки 23-х типов, каждый из которых однозначно определен с помощью признака "Path Terminator". Большинство навигационных систем RNAV реализуют, как правило, только часть из 23-х 'Path Terminators', но и для P-RNAV требуется далеко не весь их перечень. Таблица 1.7 Символы точек пути Path Terminator образуется из двух заглавных букв - первая характеризует заданную траекторию полета, а вторая показывает, где или как кончается данный участок траектории полета. В табл. 1.8 представлен принцип кодирования типов участков окончания траекторий в соответствии с ARINC 424. 40 Далее рассмотрены только те участки траекторий из Path Terminators, которые требуются и рекомендуются при выполнении полетов P-RNAV согласно [13]. Требуется выполнять маневры и выдерживать следующие типы траекторий: - IF - выход на точку из любого текущего места ВС; - TF - полет по линии пути, соединяющей две последовательные точки ЛЗП; - CF - полет на точку с заданным путевым углом; - FA - полет от точки с заданным путевым углом до достижения заданной высоты; - DF - полет от текущего места ВС прямо на точку без заданного путевого угла. Таблица 1.8 Принцип кодирования типов участков окончания траекторий Первый символ 1 А С D F Н Наименование Применяемое кодирование траектории 2 3 Constant DME arc AF Course to CA, CD, CF, CI, CR Computed track DF Course from fix to FA, FC, FD, FM Второй символ 4 A С D F HA, HF, HM 1 I Holding pattern terminating at Initial Fix IF M Р Procedure PI-CF R R Т V Наименование Применяемое кодирование траектории 5 6 Altitude CA, FA, HA, VA Distance FC DME distance CD, FD, VD Fix AF, CF,DF,HF, IF, TF, RF Next leg PI-CF, VI Manual termination Radial termination FM, HM, VM CR, VR. Constant Radius RF Track between TF Heading to VA, VD, VI, VM, VR Примечание. Жирным наклонным применяемые при использовании RNAV. шрифтом выделены участки траекторий, Рекомендуется выполнять маневры и выдерживать следующие типы траекторий: - НМ - полет по процедуре ожидания до ее принудительной (ручной) отмены; - НА - полет по процедуре ожидания с отменой при достижении заданной высоты; - HF - полет по процедуре ожидания с отменой над Holding Fix после одного круга; - RF - полет с заданным радиусом относительно заданной точки. Описание кодированных точек и типов траекторий для зональной навигации РRNAV и RNP-RNAV в соответствии с ARINC 424 дано в табл. 1.9. Остальные 14 участков траекторий не применяются в процедурах P-RNAV и RNP-RNAV. 41 * ) Пример применения данного типа траектории. При полете между WP А и В диспетчер ОВД дал указание следовать на WPT В. После активирования WP В пилот нажал клавишу GO-TO (DIRECT ТО). В момент нажатия клавиши бортовой компьютер вычислил параметры новой линии заданного пути, которая и является дугой большого круга. 1.13.2. Особенности прохождения точек пути Тип участка между двумя точками Fly-over всегда определяется типом окончания траектории TF. При расчете схем вылета, захода на посадку и ухода на повторный заход на оснозе RNAV и RNP-RNAV WPs размещают таким образом, чтобы расстояние S между ними было не меньше минимальной длины стабилизации L. В свою очередь L зависит от типа последовательности точек Fly-over и Fly-by, значения крена и скорости полета (рис. 1.2). Выход на новую ЛЗП после пролета точки Fly-over осуществляется под углом 30° к ЛЗП из расчета, чтобы к точке пути подойти с заданным путевым углом участка. Расстояние S (см. рис. 1.2) зависит от участка схемы захода на посадку или ухода на повторный заход и находится в пределах 0.8 - 1.4 км (для ВС кат. А - меньшее значение, для кат. D - большее). Разработчиками процедур P-RNAV и RNP RNAV рассчитываются траектории полетов, представленные далее. Точки пути типа Fly-over на схемах вылета, прибытия и захода на посадку устанавливаются только по необходимости для обеспечения безопасного пролета препятствий, по шумовым критериям или из-за сложной структуры воздушного пространства в районе аэродрома. 43 На схемах в районе аэродрома после прохождения точки Fly-over возможны только три типа участков - DF (Direct to fix), TF (Track to fix), CF (Course to fix). Информация об указателе окончания траекторий публикуется в АИП. Однако и по картам Jeppesen можно определить указатель окончания траектории: если на участке схемы опубликован ЗПУ - это TF или CF, а если участок схемы обозначен точками пути без ЗПУ - это DF. 1. Траектория Fly-over - TF устанавливается в случае, когда после прохождения Fly-over требуется выход на новую линию пути, при этом угол выхода не менее 30°. Защищенное воздушное пространство для учета препятствий рассчитывается из предположения, что ВС будет выходить на осевую линию следующего участка с углом выхода не менее 30° (см. рис. 1.3). 2. Траектория Fly-over - DF обычно устанавливается на схемах вылета, что позволяет более плавно разворачиваться для полета на следующую точку пути. При этом выход на новую линию пути не обязателен, поскольку защищенное воздушное пространство учета препятствий вокруг такой траектории расширено (рис. 1.4). 3. Траектория Fly-over - CF устанавливается на схемах RNAV-ILS, когда в завершении процедуры RNAV после пролета точки Fly-over выполняется разворот для выхода в створ курсового маяка ILS с углом выхода 30°. 4. Тип участка RF - разворот с фиксированным радиусом. Тип участка RF может устанавливаться в сложной структуре воздушного пространства и требует точного выдерживания траектории полета, особенно при больших углах разворота. А кроме того, использование данного типа участка позволяет уменьшить область учета препятствий по сравнению с использованием разворотов в точках Fly-by и Fly-over. Данный тип участка устанавливается в схемах захода на посадку и схемах вылета, основанных на RNP-RNAV. 44 Назначение RF - переход с одного участка схемы на другой по предписанной криволинейной траектории, поэтому RF рассматривается как отдельный участок схемы, имеющий три точки пути: начальная RF, конечная RF и точка, от которой задается радиус разворота. Эта точка называется "центр разворота" (рис. 1.5). Защищенное воздушное пространство вокруг RF построено из условия, что ВС будет регулировать крен при развороте таким образом, чтобы с учетом влияния ветра выдерживать заданный радиус разворота. По этой причине невозможно опубликовать заданный крен для RF, поскольку он зависит от сложившейся обстановки скорости полета и воздействия ветра. 45 Предполагается также, что ВС начинает создавать крен для разворота еще до прохождения точки начала RF. То же и в конце RF - вывод из крена начинается до конечной точки RF. По сути, точки начала и конца RF являются точками Flyby. 1.14. Процедуры маневрирования 1.14.1. Зона ожидания Зона ожидания (30), основанная на RNP-RNAV (рис. 1.6), определяется: 1) точкой пути ожидания, координаты которой выражены в системе WGS-84; 2) направлением разворота после прохождения Holding WPT (Fix); 3) минимальной и максимальной высотой полета с дискретностью 100 футов или 50 м; 4) максимальной приборной скоростью полета в зоне ожидания; 5) путевым углом линии пути приближения относительно истинного меридиана с точностью до десятой доли градуса; 6) длиной (d1) линии пути приближения с точностью до десятой доли мили; 7) шириной зоны ожидания (d2), зависящей от радиуса разворота; 8) значением RNP (d3); 9) расстоянием d4, используемым при построении защитного предела при входе с сектора 4, d4 = 0.35 • d2; 10) увеличенным значением RNP при выполнении разворота: d5 = 1.4 • RPN; 11) шириной буферной зоны (d6), которая определяется по большему числу из RNP + 3.7 км или 9.3 км. 46 Процедура ожидания RNP-RNAV задается, кроме прочего, указателями окончания траектории, которые определяют, когда будет отменен режим ожидания в FMS: 1) HF - 'holding to a fix' - вход, один полный круг и отмена ожидания над Holding Fix. Процедура применяется на схемах захода на посадку типа course reversal; 2) HM - 'holding to a manual termination' - вход на заданной высоте и с заданной скоростью, полет в режиме ожидания до принудительной отмены экипажем. Применяется в основном в конце процедуры missed approach; 3) НА - 'holding to an altitude' - вход и ожидание, как правило, со снижением, с отменой режима после того, как будет достигнута заданная высота и самолет, завершив круг, пройдет над точкой Holding Fix. Выход из ожидания HF и НА будет производиться автоматически, при этом FMS будет обеспечивать траекторию полета Fly-by Holding Fix TF next WPT. Предполагается, что ВС, оборудованное системой RNP-RNAV, сможет оставаться с вероятностью 95% в пределах схемы 30. На рис. 1.6 данная область ограничена пунктирной линией. Точка пути, на которой основана ЗО, в зависимости от сектора входа может быть Fly-by или Fly-over. Ширина 30 определяется радиусом разворота с учетом следующих углов крена: для эшелонов полета менее FL245 - 23°, для больших эшелонов - 15°. При полете в 30 управление ВС должно осуществляться в автоматическом режиме с учетом парирования влияния ветра на угол сноса на прямолинейных участках и изменением угла крена во время разворота. 1.14.2. Процедуры вылета Процедуры вылета с использованием RNAV, по сравнению с обычными, позволяют: - создавать траектории полета с соблюдением принципа наведения на каждом отрезке с учетом высокой точности их выдерживания; - значительно снижать шумовое воздействие на критичные к шуму районы за счет более точного выдерживания траекторий полета, установленных с учетом обхода таких районов. Данные процедуры вылета имеют следующие особенности построения: 1) в RNAV SID, как и в обычных SID, предполагается маневрирование с кренами 15°, a RNP-RNAV SID-20е; 2) точка первого разворота устанавливается на продолжении оси ВПП не ближе рубежа, на котором достигается высота 400 футов (120 м) относительно выходного торца ВПП (DER). Такая высота при нормированном градиенте набора 3,3% достигается на удалении 1.9 м. миль за торцом DER. При большем градиенте набора (PDG) эта точка приближается к DER; 3) в траекториях полета не предусматриваются углы разворотов более 120°. В процедурах RNP-RNAV развороты на углы более 90° могут задаваться заданным радиусом разворота, т.е. заданием типа участка терминатором RF; 4) для безопасного пролета препятствий применяются в основном ограничения по высоте (заданные условия набора) и только в крайних случаях с целью уменьшения зоны учета препятствий могут устанавливаться ограничения по скорости полета; 5) участки полета с заданным курсом и участки векторения не устанавливаются, поскольку их невозможно программировать (кодировать) в оборудовании RNAV. Однако это не препятствует использованию диспетчером векторения или полету на любую заданную диспетчером точку; 6) процедуры RNAV SID заканчиваются в точке пути, используемой в структуре маршрутов. Если такой точки не существует либо она расположена слишком далеко. RNAV SID содержит тактическую точку, в которой достигается безопасная высота 48 полета по маршруту, после чего дается предписание (например, DF, CF или TF) для выхода на точку пути нужного маршрута. Очень важным моментом при вылете является выполнение первого разворота. Рассмотрим четыре возможных маневра и защищаемое пространство вокруг установленных траекторий полета (рис. 1.9 - 1.12). На рис. 1.9 - 1.12 штриховкой показаны дополнительный зоны учета препятствий, в которых запас высоты над препятствием (МОС) уменьшается от установленного значения до нуля. Маневр conditional transition (рис. 1.12) предписывается, когда разворот осуществляется по достижению заданной высоты. В этом случае невозможно установить первую точку пути SID. Предполагается, что разворот может быть начат как при достижении определенной высоты не менее 120 м/400 фут и не ранее 600 м от начала ВПП, так и за DER. Такие маневры программируются (кодируются) в оборудовании уровня FMS. При использовании автономных приемников GNSS класса А потребуется вмешательство членов летного экипажа в его работу, а именно, включение задачи ПРЯМО НА (DF) после выполнения первого разворота. На рис. 1.13 представлена схема RNAV SID аэродрома Хельсинки. Выполнение данного SID возможно при условии наличия на борту ВС оборудования P-RNAV, получающего информацию от двух маяков DME или GNSS. В базе данных опубликованные SID должны иметь кодификаторы, которые даны в квадратных скобках. В описании SID указана структура участков для каждого SID. 1.14.3. Процедуры прибытия и захода на посадку 1.14.3.1. Общие положения Внедрение процедур прибытия и захода на посадку с использованием метода зональной навигации позволит принести выгоды как ОВД, так и авиакомпаниям. Однако эти процедуры в настоящее время обладают одним недостатком - они уменьшают гибкость использования воздушного пространства и свободу действий диспетчеров ОВД в воздушном пространстве с интенсивным воздушным движением. Поэтому диспетчеры в часы пик с целью увеличения пропускной способности часто предпочитают векторить все ВС, независимо от наличия процедур RNAV и навигационных возможностей прибывающих ВС. Им не хватает времени и навыков регулировать "смешанное" воздушное движение, когда одно ВС выполняет схему P-RNAV и летит по заданной траектории, а другое ВС, не имеющее допуска к P-RNAV, должно заводиться на посадку векторением. Именно по этой причине в ряде аэропортов Западной Европы ожидается введение ограничений на "смешанное" воздушное движение. Это означает, что в таких аэропортах разрешение на P-RNAV может быть обязательным в определенные дни и часы его работы, и именно в эти дни и часы процедуры P-RNAV и RNP-RNAV будут применяться в полную силу. Преимущества процедур прибытия и захода на посадку с использованием метода зональной навигации заключаются в следующем: - при снижении по оптимальным траекториям возможен полет с задросселированными двигателями вплоть до входа в глиссаду; - при снижении с задросселированными двигателями уменьшается шумовое и эмиссионное воздействие на окружающую среду; - снижается нагрузка на пилотов и диспетчеров, особенно по ведению связи. 49 Главной особенностью таких процедур является то, что начало и конец каждого участка схемы (STAR, Initial, Intermediate, Final, Missed Approach) задаются фиксированными точками пути - IAF, IF, FAF, MAPt, MAHP. Построение процедур RNAV STAR & Approach имеет следующие особенности: - маневрирование осуществляется с кренами 25° на всех этапах прибытия и захода на посадку, при уходе на второй круг в схемах RNAV - 15°, RNP-RNAV - 20°; - как правило, обеспечивается непрерывность траектории полета от точки схода с трассы до MAPt и, далее, при уходе на второй повторный заход, до МАНР. Однако, при определенных обстоятельствах, могут применяться "Открытые маршруты прибытия" - "Open STAR" (см, далее); - используются различные наименования для STAR в зависимости от имен точек их начала и различий в траектории полета; - в тех местах, где различные STAR накладываются друг на друга, путевые углы, расстояния и заданные высоты этих STAR совпадают; - точки MAPt и МАНР являются точками Fly-over; - все остальные точки пути RNAV STAR & Approach и RNP-RNAV Approach являются точками Fly-by, в том числе и при применении разворотов с заданным радиусом RF; - для безопасного пролета препятствий применяются в основном ограничения по высоте (заданные условия снижения) и только в крайних случаях, дополнительно, ограничения по скорости полета; - в вертикальном плане предписываются в основном диапазоне высот, а не конкретные заданные высоты, что особенно важно для процедур с применением ВагоVNAV; - в траекториях полета не предусматриваются углы разворотов более 120°. В процедурах RNP-RNAV развороты на углы более 90° выполняются с заданным радиусом, т.е. RF; - участки полета с заданным курсом не устанавливаются, поскольку их невозможно программировать (кодировать) в оборудовании RNAV; - любой STAR не может заканчиваться в начале конечного участка захода на посадку (Downwind Leg), поскольку это приводит к необходимости полета с заданным курсом, что в процедурах RNAV не допускается. 51 1.14.3.2. Процедуры типа 'Y' и ‘Т’ С вводом 12-й поправки в [12], ИКАО внедрило концепцию Terminal Area Approach (ТАА) - аэроузловой район подхода, который позволяет производить заход на посадку в режиме зональной навигации с использованием приемников базовой GNSS для навигации в районе аэродрома без привязки к наземным радиосредствам. Концепция ТАА базируется на двух типах процедур, в горизонтальном плане напоминающих латинские буквы ‘Y’ и ‘Т’ (рис. 1.14). Применение этих двух типов процедур позволяет сконструировать схемы захода на посадку с любых направлений, которые в ряде случаях не требуют сложных маневров типа Course Reversal, Все точки пути, за исключением MAPt, являются точками Fly-by. Участки схемы Intermediate, Final и Missed Approach находятся на продолжении оси ВПП. На рис. 1.16 дана схема захода на посадку типа "Т". При конструировании процедуры заход на посадку в режиме зональной навигации с использованием приемников базовой GNSS для навигации в районе аэродрома без привязки к наземным радиосредствам рассчитывается не MSA, a Terminal Arrival Altitude (ТАА) - абсолютная высота прибытия в район аэродрома. Данная абсолютная высота определяется в радиусе 25 м. миль (46 км) относительно точки IAF по секторам процедуры типа "Y" (рис. 1.15) или "Т" (рис. 1.16). В зависимости от препятствий в районе аэродрома абсолютная высота прибытия может определяться и в большем радиусе. Минимальный запас высоты над препятствием в секторе составляет 300 м (984 футов). Terminal Arrival Altitude рассчитывается для стандартной атмосферы и представляется на картах (схемах) в виде пиктограмм (см. рис 1.16). Каждая зона ТАА окружена буферной зоной шириной 5 м. миль (9 км). Если в пределах буферной зоны высота препятствия превышает самое высокое препятствие а пределах зоны ТАА, то минимальная абсолютная высота рассчитывается на основе самого высокого превышения в буферной зоне, к которому добавляется запас высоты 300 м (934 футов), а итоговое значение округляется до ближайшего числа, кратного 50 м (100 футам). В зависимости от расположения препятствия сектора могут быть поделены на сегменты (рис. 1.16). 1.14.4. Закрытые и открытые маршруты прибытия Маршруты прибытия RNAV STAR делятся на два типа: Closed and Open RNAV STARs - закрытые и открытые стандартные маршруты прибытия. Закрытые STAR имеют замкнутую траекторию полета и заканчиваются в точке IF на посадочной прямой. На рис. 1.17 это точка SD022. Такие STAR позволяют выполнять полет по самым оптимальным траекториям с постоянным градиентом снижения и задросселированными двигателями. Однако, в ТМА с интенсивным движением существует вероятность того, что при выходе на конечный участок захода на посадку с разных направлений ВС могут опасно сближаться друг с другом. Поэтому закрытые STAR, как правило, вводятся в районах аэропортов с низкой плотностью движения. Векторение здесь не предполагается, но инструментом диспетчерского регулирования является возможность выдачи указания или разрешения следовать на одну из тактических точек STAR (на рис. 1.17 показано стрелками). Данный ‘’растянутый’’ закрытый STAR содержит много тактических точек, которые установлены для того, чтобы, если позволяет обстановка и самолет снизился на определенную высоту и погасил скорость, диспетчер ОВД мог сократить маршрут полета путем перенацеливания ВС на одну из таких точек. Полет по полному STAR, т.е. по всем его точкам, выполняется в редких случаях, например при сбоях в ОВД, при ожидании или при потере связи. 53 Открытые STAR применяются в ТМА с интенсивным воздушным движением, суть которых в том, что они заканчиваются (прерываются) до выхода ВС на конечный участок захода на посадку. Применение открытых STAR обусловлено необходимостью "плавного" перехода к сплошной зональной навигации на основе RNPRNAV. На рис. 1.18 STAR со стороны TWIGG заканчивается в точке SD428. Далее линия пути не задана, STAR "открыт", т.е. не замкнут на точку ALBAR, расположенную в створе ВПП. Для вывода ВС на посадочную прямую возможно векторение. Как исключение, если позволяет воздушная обстановка, диспетчер может дать указание летному экипажу самостоятельно выходить на точку ALBAR и далее заходить на посадку на ВПП 27С. Такие открытые STAR с переходом на векторение применяются особенно часто при заходах на посадку на параллельные полосы. На рис. 1.18 STAR со стороны HOLGA, BULFA и JUREN является закрытым, т.к. они замкнуты на точку ALBAR, являющуюся IF для захода на посадку на полосу 27С. При подходе с этих направлений возможен полет без векторения. Однако для целей обеспечения эшелонирования воздушных судов диспетчер ОВД может прервать полет ВС по закрытому STAR и применить векторение. 1.14.5. Переходные участки Внедрение метода RNAV позволило разработчикам расширить возможности по конструированию схем захода на посадку и тем самым оптимизировать использование воздушного пространства. При разработке традиционных траекторий захода на посадку после окончания STAR в точке IAF начинается схема захода на посадку. Схема захода на посадку, исходя из концепции ИКАО, изложенной в [12], включает в себя три участка: начальный (Initial), промежуточный (Intermediate) и конечный (Final). Причем начальный участок строится в виде прямолинейного отрезка в предположении, что он начинается в точке, в которой расположено радиосредство наведения. Однако, при наличии на борту ВС оборудования RNAV, использование наведения позволяет начальный участок конструировать из нескольких прямолинейных участков. В том случае, когда начальный участок состоит из нескольких участков, траектория полета от точки IAF до точки IF называется TRANSITION - переходный участок. В качестве примера дана карта RNAV STAR для аэродрома Женева (рис. 1.19), из которой видно, что от IAF LIRKO до IF BELKA и VOR/DME ST PREX полет происходит по TRANSITION GINIG 3N и GINIG ЗА. В отношении критериев расчета минимальной высоты полета на участке TRANSITION необходимо отметить, что ширина зоны учета препятствий зависит от типа применяемого RNP и имеет постоянную ширину. Запас высоты над максимальным препятствием в зоне учета препятствий - аналогичный начальному участку (Initial) традиционной схемы захода на посадку, составляет 300 м (984 фута) в основной зоне и уменьшается до нуля на краю дополнительных зон. 1.14.6. Заход на посадку с вертикальным наведением Важной составляющей зональной навигации является заход на посадку в режиме зональной навигации с вертикальным наведением по данным барометрическо- го датчика высоты (Baro-VNAV Approach). Более полное наименование данного вида захода на посадку - Approach and landing operation with Vertical guidance. 56 Обеспечиваемое с помощью бортового компьютера вертикальное наведение основывается на барометрической высоте и удалении от порога ВПП и определяется в виде угла траектории в вертикальной плоскости - VPA (Vertical path angle) от высоты точки вертикальной траектории, расположенной над рабочим порогом ВПП - RDH (Reference datum height). При наличии отклонения от заданного угла снижения на конечном участке захода на посадку это отклонение индицируется на приборе пилота в виде планки глиссады 'Like ILS’ По текущему отклонению от заданной траектории рассчитывается управляющий сигнал по выдерживанию заданной вертикальной траектории автопилотом. Процедуры Ваrо-VNAV не входят в P-RNAV, поскольку охватывают только конечный участок захода на посадку и уход на второй круг. Внедрение схемы захода на посадку методом Baro-VNAV является перспективным по следующим причинам: - данный вид захода на посадку относится к точному заходу на посадку, т.к. обеспечивается наведение по высоте (непрерывный угол снижения) на конечном участке; - не требуются наземные дорогостоящие средства, формирующие глиссаду; -- не требуется дорогостоящее бортовое средство, принимающее сигналы глиссадного радиомаяка. Для выполнения процедуры Baro-VNAV должны быть соблюдены следующие условия: - навигационная система должна быть сертифицирована по RNP 0.3 или выше; -- барометрические датчики и вычислители профилей снижения должны быть сертифицированы для применения при заходе на посадку; - база данных навигационной системы должна содержать следующие необходимые элементы: точки пути, угол снижения с точностью до 0.01° и заданные высоты; - летный экипаж должен пройти подготовку и иметь допуск к выполнению данного вида захода на посадку. При разработке схемы захода на посадку методом Baro-VNAV, с целью учета температурной поправки барометрического высотомера, угол траектории в вертикальной плоскости определяется для минимальной температуры самого холодного месяца на аэродроме по данным за 5 лет, увеличенной в меньшую сторону с кратностью 5°, или температуры -15°С, в зависимости от того, что меньше. Если во время захода на посадку фактическая температура на аэродроме меньше той, которая использовалась при расчете схемы, то заход на посадку не разрешается (см. рис 1.20). Недостатком данного способа захода на посадку является возможная крутая траектория снижения при фактической высокой положительной температуре на аэродроме. 60 1.15. Критерии учета препятствий захода на посадку и вылета Схемы захода на посадку с использованием RNAV на основе базовых приемников -GNSS строятся на основе определенных критериев, которые не свойственны традиционным схемам. В табл. 1.11 представлены основные характеристики базовых приемников GNSS, допуски на технику пилотирования и значение полуширины зон учета препятствий ( 1 2 W), которые используются в качестве критериев при построении схем захода на посадку и вылета для самолетов; в таблице 1.12 - для схем захода на посадку в соответствии с RNP1 [12]. Таблица 1.11 Полные допуски системы и значения полуширины зон учета препятствий для базовых приемников GNSS Параметр Точность навигационной системы *, м Допуск на выдачу предупреждения, связанного с RAIM *, км Время выдачи предупреждения, с Допуск на технику пилотирования в поперечном направлении - FTT (2σ). км Порог срабатывания сигнализации контроля целостности АТТ, км Продольное отклонение отлинии пути -- ХТТ (2σ), (ХТТ = ATT + FTT), км Значение полуширины зоны, км Точки пути схемы захода на посадку и вылета IAWP IAWP IWP FAWP MAWP WP участка ухода S> S< на второй круг 55 км 55 км или схемы вылета 230 230 230 230 230 230 3.70 1.85 1.85 0.56 0.56 1.85 30 10 10 10 10 10 3.70 0.93 0.93 0.56 0.37 0.93 3.70 1.90 1.90 0.56 0.56 1.85 7.40 2.80 2.80 1.10 0.93 2.80 14.80 9.30 9.30 3.70 1.85 9.30 S - радиальное расстояние от КТА. *) Включает все допуски на. вычисления в системе RNAV: - собственная точность космического сегмента (13 - 100 м); - допуск, обусловленный бортовой системой приема; - допуск, связанный с вычислениями в системе; - точность геодезических координат точек пути. Таблица 1.12 Значения полуширины зон учета препятствий для RNP1 Участок захода на посадку Начальный Промежуточный Конечный Уход на второй круг Полуширины зоны, км 4.63 4.63 4.07 4.26 62 В схеме захода на посадку минимальный запас высоты над препятствием (МОС) в основной зоне составляет: - начальный участок - 300 м (1000 фут); - промежуточный участок - 150 м (500 фут); - конечный участок - 75 м (245 фут); - участок ухода на второй круг: начальный - 30 м (100 фут), конечный - 50 м (165 фут), В дополнительных зонах значение МОС уменьшается от указанного значения до нуля. 1.16. Критерии учета препятствий при полете по маршруту Для маршрутов RNAV, основанных на RNP участков, значение полуширины зоны ( 2 W) учета препятствий (рис. 1.21) определяется как: 1 1 2 W – 2RNP + 2, м. миль, В табл 1.13 дано значение зоны учета препятствий для маршрутов с типом RNP4, 2 и 1. Значение RNP 4 2 1 Ширина зоны учета препятствий половина ( 1 2 W) полная (W) км м. миля км м. миля 18.5 10 37.0 20 11.1 6 22.2 12 7.4 4 14.8 8 Защитные зоны учета препятствий, связанные с разворотом в точке пути Fly-by, строятся с учетом параметров разворота и влияния ветра во время разворота. Для маршрутов с типом RNP1 развороты должны производиться с фиксированным радиусом (RF), равным 28 км (15 м. миль) на FL190 и ниже, 41.7 км (22,5 м. миль) на FL200 и выше. Конфигурация защитной зоны учета препятствий имеет сложный вид. На рис. 1.22 показана зона учета препятствий только в одном направлении. 63 Значение минимального запаса высоты над препятствием (МОС), подлежащим применению в основной зоне при выполнении полета по ППП, составляет 600 м (2000 фут) над районами возвышенностей или в горных районах и 300 м (1000 фут) в других районах. В дополнительных зонах значение МОС составляет половинное значение МОС основной зоны. Фирма Jeppesen на картах ENROUTE (H/L) для региона Аляски с 23 августа 200З г. стала публиковать минимальную абсолютную высоту - МЕА GPS. Данная высота наносится на участках маршрутов, на которых отсутствует возможность приема сигналов наземных маяков VOR или рабочая область которых в горных районах имеет ограниченную дальность. Рядом со значением опубликованной минимальной абсолютной высоты присутствует буква G, пример: 4500G. Ширина зоны учета препятствий соответствует RNP2 (см. табл. 1.13). При рельефе местности 5000 футов и более МОС в основной зоне - 2000 футов, при меньшей высоте рельефа местности - 1000 футов. В дополнительных зонах значение МОС уменьшается от указанных значений до нуля. 1.17. Изменение чувствительности индикатора боковых отклонений В системах RNAV индикация отклонения от заданной линии пути в поперечном направлении индицируется при помощи вертикальной планки на приборе ПНП. При этом цена деления шкалы в километрах или морских милях может устанавливаться вручную или автоматически. При выполнении полетов в районах действия RNAV важное значение имеет правильное использование чувствительности ПНП, т.е. установка цены деления крайнего отклонения вертикальной планки. Использование завышенной чувствительности влечет к необоснованному реагированию на точное выдерживание линии заданного пути. К примеру, при полете по маршруту в случае установки отклонения вертикальной планки в крайнее положение на 1 км цена одного деления составит 0.2 км. Стремление пилота при ручном пилотировании выдерживать вертикальную планку в центре потребует от него усилий в технике пилотирования. В этой связи целесообразно придерживаться рекомендованных значений установки чувствительности ПНП. При полете по маршруту рекомендуется устанавливать чувствительность ± 3.7 км (2 м. мили), при этом цена одного деления на шкале ПНП (CDI) будет соответствовать 0.74 км (0.4 м. мили). 64 При подлете к аэродрому за 56 км (30 м. миль) от контрольной точки аэродрома при включении режима захода на посадку базовый приемник GNSS переключается на чувствительность ПНП (CDI) ±1.9 км, при этом предел срабатывания сигнализации RAIM устанавливается ± 1.9 км. По достижении расстояния до FAWP 3.7 км предел чувствительности ПНП (CDI) и RAIM плавно меняется и в FAWP устанавливается ± 0.6 км, соответствующий заходу на посадку. При этом ВС, по крайне мере за 3.7 км до FAWP, должно находиться с посадочным путевым углом и с отклонением от линии пути не более ± 0.6 км. При уходе на повторный заход после пролета точки MAWP чувствительность ПНП (CDI) изменяется автоматически на ± 1.9 км. 65 2. ФУНКЦИОНАЛЬНЫЕ ДОПОЛНЕНИЯ GNSS 2.1. Основные недостатки GNSS Опыт эксплуатации систем GPS и ГЛОНАСС, как основы GNSS, показал, что этим системам свойственны следующие недостатки: - чувствительность к умышленным (иногда их называют террористическими), промышленным и атмосферным помехам; - блокировка сигнала при затенении антенны элементами конструкции воздушного судна во время выполнения маневра; - недостаточная точность при использовании для целей точного захода на посадку. Указанные недостатки GNSS могут быть устранены при использовании функциональных дополнений GNSS, основное назначение которых - повышение точности, целостности, готовности и непрерывности обслуживания GNSS. 2.2. Типы функционального дополнения GNSS Для преодоления свойственных системам GNSS ограничений и недостатков системы GPS и ГЛОНАСС должны использоваться с различного рода функциональными дополнениями. Существуют три типа функциональных дополнений: бортовые, наземные и спутниковые. Бортовые функциональные дополнения подразделяются на автономный контроль целостности приемника (RAIM) или автономный контроль целостности на борту ВС (AAIM). Наземные функциональные дополнения (GBAS) с локальной зоной действия в пределах до 37 км (20 м. миль) представляют собой контрольные устройства, размещаемые в аэропорту или в районе аэропорта, в котором планируется выполнение захода на посадку по категориям I - III. Наряду с локальной зоной действия, GBAS могут быть и с более расширенной зоной действия. Примером такой GBAS является Австралийская наземная региональная система дополнения (GRAS), которая охватывает территории Австралии и Новой Зеландии. Спутниковые функциональные дополнения (SBAS). Наземные функциональные дополнения не позволяют охватить все этапы полета и в этой связи для охвата обширных районов в дополнение к космическим сегментам GPS и ГЛОНАСС используются спутниковые системы, позволяющие передавать дополнительную информацию. 2.2.1. Бортовые функциональные дополнения Требования к бортовым функциональным дополнениям изложены в TSO С129 [10], которые многими государствами приняты практически полностью. Основополагающим положением TSO С129 является наличие в бортовом оборудовании СНС функции RAIM. Выполнение требований TSO-C129 является достаточным для использования СНС как дополнительного навигационного средства при 66 выполнении полетов по маршрутам, в районе аэродрома и при выполнении заходов на посадку по схемам неточного захода. Оборудование, сертифицированное по техническому стандарту TSO С129, делится на классы: А В, С Знание классов оборудования необходимо для практических целей, т.к. на картах (схемах) могут быть указаны ограничения по использованию конкретного класса оборудования (см. на рис. 1.13 примечание 6). Класс А - оборудование, сочетающее в себе навигационный датчик, определяющий трехмерные координаты ВС: широту ( ), долготу ( ), высоту (h), время (UTC) и вектор путевой скорости (W), а также навигационный вычислитель, решающий навигационные задачи и имеющий ряд сервисных и справочных функций. Это самый распространенный класс оборудования СНС, которое устанавливается на ВС, не имеющих бортовых навигационных комплексов последнего поколения (КС ПНО, FMS). Для гарантирования целостности в приемник встраивается устройство, обладающее функцией автономного контроля целостности в приемнике (RAIM) (см. далее). Оборудование класса А имеет подклассы; А1 и А2. Оборудование подкласса А1 одобрено для маршрутного полета, полета в зоне аэропорта и для неточного захода на посадку. Оборудование подкласса А2 одобрено для маршрутного полета и полета в зоне аэродрома. Поскольку оборудование СНС класса А является также и оборудованием зональной навигации, то к нему применяются такие же требования, как и к аппаратуре зональной навигации. Класс В - оборудование, состоящее из навигационного датчика и устройства передачи данных: h, UTC, W в бортовые навигационные комплексы (КС ПНО, FMS). Оборудование класса В можно рассматривать как один из датчиков многофункциональных навигационных систем, в которых происходит или коррекция координат по данным от СНС, или счисление координат по получаемой от СНС информации, и в которых происходит решение всех навигационных и сервисных задач на более высоком уровне, определяемом возможностями этих систем, как правило, большими, чем у оборудования класса А. Оборудование класса В имеет подклассы: В1, В2, ВЗ, В4. В оборудовании подклассов В1 и В2 предусмотрен RAIM. Оборудование подкласса В1 позволяет выполнять маршрутный полет, полет в зоне аэродрома и неточный заход на посадку, а В2 - полет по маршруту и в зоне аэродрома. В оборудовании подклассов ВЗ и В4 датчики объединены, чтобы на уровне ВС обеспечить контроль целостности, эквивалентный тому, который обеспечивает RAIM. Оборудование подкласса ВЗ позволяет выполнять маршрутный полет, полет в зоне аэродрома и неточный заход на посадку, а В4 - полет по маршруту и в зоне аэродрома. Класс С - оборудование кпасса С, как и класса В, является датчиком для бортовых навигационных комплексов, обеспечивающих автоматический и директорный режим выполнения полета. Взаимодействие с бортовым комплексом всегда двустороннее с целью поддержки всех алгоритмов работы оборудования СНС в процессе обработки информации от спутников. Таким образом, оборудование класса С "встроено" в комплексные системы пилотажно-навигационного оборудования (КС ПНО, FMS) и является его составной частью. В силу этого и ряда других факторов оборудование класса С считается более надежным, чем классов А и В. Это оборудование, как правило, не имеет своих органов управления и индикации, а обращение к СНС, управление оборудованием СНС класса С производится через многофункциональные пульты. Оборудование СНС класса С взаимодействует не только с навигационным оборудованием ВС. Как датчик параметров полета ( h, UTC, W), оно используется в системах TCAS, ADS, дисплеях навигационной обстановки, ответчиках режима S и других. Оборудование класса С делится на подклассы: С1, С2, СЗ, С4. Подклассы С1÷С4 соответствуют подклассам ВТ÷В4. 67 В табл. 2.1 перечислены требования TSO С129 к рассмотренным выше классам оборудования. Таблица 2.1 Инерциальная Район полета: Класс Налисистема, обеснеточный оборучие океани- континенаэропечивающая заход дования RAIM ческий тальный узел функцию RAIM на посадку Класс А - GPS-датчик и навигационный вычислитель А1 + + + + + + А2 + + + нет Класс В - GPS-датчик с возможностями интегрирования в навигационной системе (т.е. КС ПНО (FMS), многофункциональная навигационная система) В1 + + + + + В2 + + + + нет ВЗ + + + + + В4 + + + + нет Класс С - GPS-датчик с возможностями интегрирования в навигационной системе (как в классе В), которая обеспечивает расширенные возможности автоматического и директорного режима полета и уменьшение навигационных ошибок С1 + + + + + С2 + + + + нет СЗ + + + + + С4 + + + + нет Примечание. Знаком "+" указано наличие и возможность. Функция RAIM. Бортовое оборудование СНС класса А, В и С имеет функцию наблюдения за достоверностью информации, получаемой от спутников. Ее назначение: - своевременно обнаружить неустойчиво работающий спутник и исключить его из обработки для навигационных определений; - рассчитать текущую ошибку определения координат и, сравнивая расчетное значение с максимально допустимой на данном этапе полета, предупредить летный экипаж о выходе расчетной ошибки за предельные значения; - определить геометрию спутников в заданной точке, в заданное время и предупреждать экипаж о том, что требуемая точность и надежность навигации по СНС в этой точке не будут обеспечены, выдавать сообщение об отказе СНС в целом и невозможности ее использования для навигации. Для решения этих задач бортовое оборудование СНС должно иметь функцию RAIM или ее эквивалент (AAIM). Обеспечение этой функции достигается обработкой сигналов, как минимум, одного дополнительного спутника. Такой алгоритм реализован в оборудовании класса А1, А2, В1, В2, С1, С2, и он заключается в том, что в целях RAIM производятся несколько независимых определений, результаты которых сравниваются между собой. По результатам этих расчетов определяется четыре устойчиво работающих спутника и по этим "отфильтрованным" спутникам производится определение навигационных параметров (φ, λ, h). При этом "фильтрующие" расчеты при работе RAiM не используются для навигационных расчетов. Но если функция RAIM отфильтровала один из 5-ти видимых спутников, то RAIM перестает работать, о чем информируется летный экипаж ВС. Воспринимать такую информацию следует так: навигационные расчеты продолжают выполняться, но они никак не контролируются и нужно быть очень внимательным. Как правило, при пропадании RAIM должны быть предусмотрены специальные навигационные процедуры. 68 Если бортовым оборудованием СНС принимается информация 6 и более спутников, то RAIM после исключения из обработки одного спутника и подключения другого продолжает работать и контролировать надежность навигационных определений. Автономный контроль целостности на борту ВС. Альтернативным способом контроля достоверности информации, получаемой от СНС, является сравнение этой информации с навигационной информацией, получаемой от других навигационных систем, таких как ИНС, LORAN-C, DME. Такой способ реализован в аппаратуре подкласса ВЗ, B4, СЗ, С4 и называется "эквивалент RAIM" или AAIM. Этот способ имеет только одно преимущество по сравнению с RAIM - нет необходимости обрабатывать сигналы от одного дополнительного спутника, что позволяет продолжать навигационные определения с гарантией их достоверности при видимости только 4-х спутников. Использование информации о барометрической высоте при стыковке оборудования СНС с датчиком высоты производится в целях: - "согласования" навигационных определений, что существенно ускоряет процедуры математической фильтрации; - "поддержки" RAIM, когда барометрическая высота используется как сфера положения только для алгоритма RAIM и только в тех случаях, когда нет возможности осуществить RAIM по пятому спутнику (т.е. обрабатываются сигналы только от 4-х спутников); - "поддержки" навигационных определений, когда барометрическая высота используется как сфера положения в режиме "Approach" (при вводе давления QNH) и при условии, что видимых спутников не хватает для работы оборудования в режиме "3D", т.е. при видимости 3-х спутников. При этом, как только в обработку включается 4-й спутник, навигационные определения (<р, Л, h, UTC, W) производятся по этим 4-м спутникам, а барометрическая высота поддерживает RAIM и выполняет функцию сглаживания. Стыковка оборудования СНС с высотомером носит рекомендательный характер при использовании СНС как дополнительного навигационного средства. Но с переходом СНС в статус основного и самодостаточного средства навигации такая стыковка является обязательной в целях снижения вероятности прерывания RAIM. Соблюдение требований TSO С129 является обязательным для бортового оборудования СНС, устанавливаемого на воздушных судах, выполняющих полеты по ППП. Исключение составляет применение не сертифицированных по TSO приемников СНС при выполнении полетов по ПВП, когда соблюдаются все правила и процедуры их выполнения, а оборудование СНС используется для обеспечения навигации в районах, где наземные навигационные средства отсутствуют или ненадежны. Каких-либо требований к не сертифицированной аппаратуре не предъявляется, т.к. ее использование ограничено строгим выполнением установленных правил и процедур ПВП, такой способ использования приемников СНС считается "вспомогательным" и не влияет ни на ПВП, ни на процедуры при выполнении визуальных полетов. При использования оборудования СНС в качестве основного навигационного средства, в дополнение к требованиям TSO С129 применяются наземные (GBAS) и спутниковые функциональные дополнения (SBAS). В наземных и спутниковых функциональных дополнениях важное место отводится повышению точности определения места ВС путем дифференциального метода корректировки спутникового сигнала. 69 2.2.2, Оценка эксплуатантом готовности системы GPS как датчика оборудования RNAV В связи с тем, что GPS не обладает 100% готовностью, перед выполнением полета необходимо осуществить оценку эксплуатационной готовности GPS. На рис. 2.1 приводятся результаты оценки готовности применения автономного GPS-приемника без барометрической поддержки (для усложнения задачи), выполненного на сайте ecacnav.com с использованием программы AUGUR В начале выясняется STATUS системы GPS на заданную дату и период времени, В представленном заключении задавались: дата - 15 июля 2003 года, период времени - 24 часа. Графический вид рис. 2.1 показывает, что на указанный период в системе будут в работе 27 спутников (Num Sats), что для полетов по B-RNAV процедуру RAIMпрогноз выполнять не требуется, поскольку линия Num Sats превышает линии для автономных GPS-приемников Un-Aided (без бароподдержки) и Baro-Aided (с бароподдержкой). В том случае если на графике линия Num Sats "провалится'' ниже линий UnAided или Baro-Aided, то для полета по маршруту необходимо выполнить процедуру RАIМ - прогнозирования. Для получения RAIM-прогноза при полете по конкретному маршруту необходимо задать дату, аэродром вылета, время вылета, пункты маршрута, истекшее время 70 прохождения пунктов по маршруту, аэродром посадки и истекшее время посадки. На рис. 2.2 дано заключение RAIM-прогноза для маршрута Хельсинки (EFNK) - Париж (LFPG), проходящему через пункты маршрута CDA, BSN; вылет 15.07.03 в 09.00 UTC, время полета 135 мин (t пол) В заключении видно, что RAIM будет обеспечиваться на всем протяжении полета, даже если вылет состоится на 15 мин (At) раньше или позже 09.00 UTC. Положительное заключение RAIM прогноза говорит от том, что контроль целостности будет обеспечен, следовательно, готовность системы также положительная. Рис. 2.2. Заключение RAIM-прогноза для маршрута Хельсинки - Париж В случае, если планируется заход на посадку в режиме зональной навигации с использованием датчика GPS, то выполняется отдельный RAIM прогноз, поскольку пороги RAIM для захода на посадку значительно меньше, чем на маршруте и в ТМА (см. табл. 2.2). Таблица 2.2 Пороги срабатывания RAIM Этап полета По маршруту В районе аэродрома Заход на посадку Значение допуска км м. мили 3.7 2.0 1.9 1.0 0.6 0.3 На рис. 2.3 приводится пример RAIM-прогноза для аэродромов: Париж (LFPG), Хельсинки (EI-HK) и Франкфурт (EDDF), дата/время: 15 июля 2003, 04:54 UTC на промежуток времени +24 ч для угла маски относительно горизонта +5°. В заключении, например, видно, что на указанную дату неточный заход на посадку (NPA) во Франкфурте в районе 08:54, в Хельсинки - 22:30 с автономной GPS без бароподдержки, а в Париже - 23:15 с бароподдержкой планировать нельзя, т.к. не будет обеспечен RAIM. 71 2.2.3. Наземные функциональные дополнения Дифференциальный метод. Суть дифференциального метода корректировки спутникового сигнала основана на относительном постоянстве значительной части погрешности СНС как во времени, так и в пространстве. Реализация дифференциального метода возможна при наличии двух приемоиндикаторов. один из которых находится на земле, а другой - на борту ВС. Геодезические координаты наземного приемо-индикатора (именуемого контрольной станцией) в выбранной системе координат в WGS-84 или ПЗ-90 известны с высокой точностью. Точность определения координат контрольной станции должна быть не ниже: по широте и долготе 5 см, по высоте относительно поверхности эллипсоида 0.5 м. Контрольная станция принимает сигналы спутников и определяет текущие координаты, которые в дальнейшем сравниваются с координатами привязки контрольной станции. По результатам сравнения определяются поправки в координаты для данного района и для текущего момента времени. Полученные поправки передаются потребителям по специальной линии радиосвязи (см. рис. 2.4). Данный метод приема сигнала относится к дифференциальному режиму работы СНС (Differential GNSS - DGNSS, Local Area Differential GNSS - LADGNSS) и позволяет повысить не только точность определения местоположения ВС, но и целостность сигнала. Кроме существенного улучшения точности GNSS, дифференциальный метод позволяет существенно повысить целостность навигационной информации. Дифференциальный метод используется как в наземных, так и в спутниковых функциональных дополнениях GNSS. Наличие наземной системы функционального дополнения (GBAS) позволяет обеспечить все виды захода на посадку, вылета и маневрирование на рабочих площадях аэродрома: ВПП, рулежные дорожки, перрон. 72 GBAS включает в себя наземные и бортовые подсистемы. Наземная подсистема с помощью ОВЧ-передачи цифровых данных передает в бортовую подсистему корректирующие поправки к координатам и сведения о целостности сигналов спутников GNSS. GBAS выполняет следующие функции: 1) обеспечение поправок к псевдодальности; 2) обеспечение данных для конечного этапа захода на посадку; 3) прогнозирование данных об эксплуатационной готовности дальномерного источника; и 4) обеспечение контроля целостности источника дальномерных измерений GNSS. В том случае, когда наземная система функционального дополнения предназначена для обслуживания только в районе аэродрома, такая система имеет локальную зону действия и именуется «дополнительная система с локальной зоной действия» (Local Area Augmentation System - LAAS). В наземных системах функционального допопнения LAAS станция слежения размещается в аэропорту или вблизи него. Сигналы такой системы принимаются ВС в окрестности аэропорта на расстоянии порядка 37 км. На рис. 2.5 представлена рабочая область LAAS при условии расположения передающих антенн в непосредственней близости от ВПП. 2.2.4. Спутниковые системы функционального дополнения В спутниковых системах функционального дополнения (SBAS) представляется информация о целостности, дополнительные сигналы дальности и дифференциальная информация, что вместе взятое обеспечивает все виды полетов, в том числе и точные заходы на посадку AVP-I и AVP-II. 73 SBAS состоит из трех отдельных сегментов: - наземная инфраструктура; - спутники SBAS; - бортовые приемники SBAS. Наземная инфраструктура включает сеть станций слежения и обработки, которые принимают данные от геостационарных спутников, рассчитывают целостность, поправки и дальномерную информацию, формирующие сигнал в пространстве спутниковых систем функционального дополнения. Спутники SBAS ретранслируют этот сигнал от наземной инфраструктуры на бортовые приемники SBAS, которые определяют информацию о координатах и времени от основной орбитальной системы GNSS и геостационарных спутников SBAS. Бортовые приемники SBAS получают дальномерную информацию и поправки и используют эти данные для определения целостности и уточнения измеренного местоположения ВС. Предполагается использование трех широкозонных (спутниковых) систем функционального дополнения: - американская WAAS (Wide Area Augmentation System); - европейская EGNOS (European Geostationary Navigation Overlay System); - японская MSAS (Multi-Fuirictional Satellite EJased Augmentation System) Космические сегменты SBAS включают в себя геостационарные спутники, расположенные на орбитах в плоскости экватора на высоте порядка 36000 км. Наименование спутников и их размещение на орбите (по состоянию на конец 2002 г.) дано в табл. 2.3. Наземные сегменты спутниковых систем функционального дополнения США WAAS включают (по состоянию на конец 2002 г.): - 25 широкозонных контрольных станций, предназначенных для контроля и наблюдения за состоянием навигационного поля; 74 - 2 широкозонные главные станции управления, предназначенные для обработки данных мониторинга; - 6 наземных станций передачи данных космическому сегменту и распределительную сеть информационного обмена и связи. Таблица 2.3 Перечень геостационарных спутников Компоненты Космический сегмент Количество спутников Наименование спутников Размещение по долготе Спутниковые системы функционального дополнения WAAS EGNOS MSAS MSAT-1 INMARSAT-III INMARSAT-III MSAT-2* ARTEMIS 2 2+1 2 POR AOR-W AOR-E ARTEMIS IOR-E MSAT-1 178°Е 54°W 15.5°W 21.4°E 64.5° E 140° E *) Информация отсутствует. Перечисленные станции объединены в единую сеть линиями передачи и обработки данных. Рабочая область - от Мексиканского залива до южной части Канады и Аляска с Алеутскими островами. После окончания проекта по расширению WAAS планируется увеличить количество контрольных станций до 48, головных - до 6, передачи данных - до 16, а количество геостационарных спутников до 8. В качестве примера на рис. 1,20 представлена схема точного захода на посадку в аэропорту NORMAN (штат OKLAHOMA, USA) с использованием спутниковых систем функционального дополнения WAAS. Спутниковая система функционального дополнения EGNOS разрабатывается по инициативе государств Европейского сообщества. Использование EGNOS улучшит сервис космических сегментов GPS/ГЛОНАСС в Европейском воздушном пространстве. EGNOS способен передавать навигационный GPS-подобный сигнал, что эквивалентно увеличению числа спутников в созвездиях GPS/ГЛОНАСС. Кроме того, спутники EGNOS транслируют сигнал дифференциальной коррекции, а также сообщения о целостности системы, что делает возможным их использование для точного захода на посадку. Архитектура EGNOS включает: - космический сегмент GPS/ГЛОНАСС и три активных геостационарных спутника. После запуска Европейской спутниковой системы Galileo архитектура EGNOS расширится; - 33 опорные станции, расположенные во всей зоне обслуживания; - 4 главных центра управления, расположенные в Великобритании (Шенвик), Германии (Лангене), Испании (Торриконе) и Италии (Кьямпино); - 7 наземных навигационных станций, находящихся в Великобритании, Германии, Испании, Италии, Португалии и Франции. Зона обслуживания - Восточная часть Атлантического океана, Европа, Средиземноморье, Северное море. Планируется расширение зоны обслуживания с включением районов Африки, Среднего Востока, СНГ, Южной Америки. Система EGNOS была испытана в конце весны 2003 г., а 06 июня 2003 г. была открыта первая станция в Лангене. Полное введение системы в эксплуатацию планируется к 01 января 2006 г. Предполагаемая точность определения координат в плане 3 м, а по высоте - 5 м. 75 MSAS включает: - 4 опорные станции мониторинга, расположенные в Японии; - 2 станции мониторинга и измерения дальности, расположенные в Австралии и на Гавайях; - 2 станции управления, расположенные в Японии; - сетевую систему связи. Рабочая область - Восточная и Юго-Восточная Азия, Западная часть Тихого океана, Северная часть Австралии. С выводом на орбиту MSAT-2 рабочая область расширится. Применение GNSS совместно с функциональными дополнениями позволяет выполнять операции с учетом соответствующего типа RNP, указанные в табл. 2.4. Таблица 2.4 Функциональные дополнения GNNS и типы операций Операции/этап полета Тип RNP RNP 1 и выше Начальный или промежу- RNP 0.3 точный участок захода на посадку, неточный заход на посадку, вылет Неточный заход на поRNP садку (с наведением в 0.3/125 вертикальной плоскости) Точный заход на RNP посадку по категории I 0.02/40 Полет по маршруту Общая архитектура функционального дополнения ДополниОсновное Самодостаточтельное средство ное средство средство ABAS или ABAS ABAS ABAS+SBAS ABAS или ABAS или ABAS ABAS+ ABAS+SBAS SBAS ABAS ABAS или ABAS+SBAS ABAS или ABAS+SBAS ABAS+SBAS ABAS+GBAS ABAS+GBAS 76 3. ОПИСАНИЕ ПРОЦЕДУР В БАЗАХ ДАННЫХ И ДОКУМЕНТАХ АЭРОНАВИГАЦИОННОЙ ИНФОРМАЦИИ Описание процедур в базах данных и документах аэронавигационной информации существенно отличается. Производителям баз данных требуется детальное описание и подробности всей процедуры для того, чтобы "закодировать" (зашифровать) ее таким образом, чтобы оборудование RNAV ее "понимало", обрабатывало и выдавало необходимую информацию летному экипажу и в автопилот. В то же время, летному экипажу требуется информация в виде карт (схем), содержащих только то, что необходимо для выполнения полета. Карты должны быть четкими, легко читаемыми при любой освещенности кабины и, самое главное, информация на карте должна быть адекватной информации, представляемой на дисплеях оборудования RNAV.Очень важно, чтобы структура и деятельность коммерческих производителей аэронавигационной информации соответствовала определенным стандартам, а именно EUROCAE ED76/RTCA DO-200A. Форма представления данных должна учитывать потребности всех возможных потребителей. Например, для программистов баз данных очень важно указание координат, указание окончания траекторий, путевых углов и расстояний с требуемой точностью и разрешением. В то же время, для летных экипажей более важным является графическое представление всей процедуры в целом. Производитель баз данных на основе информации, имеющейся в АИПах государcтв - Фирма JEPPESEN, LIDO (отделение авиакомпании Lufthansa по поддержанию баз данных), ФГУП ЦАИ ГА, - создают базы данных в формате ARINC 424. Данный формат был разработан в 1973 г. американской корпорацией Aeronautical Radio, Inc. На момент написания книги действовала 16-я версия данного формата. Для удешевления стоимости приобретения баз данных они создаются по регионам мира в соответствит с делением ИКАО (рис. 3.1). База данных включает информацию о: - аэропортах с длиной ВПП 2000 фт. (660 м) и более; - маршрутах STAR; - переходных маршрутах (TRANSITION); - заходе на посадку; - маршрутах SID; - радиосредствах VOR (VOR/DME), NDB, ILS, MLS; - точках пересечений; - минимальных высотах полета; - информационных сообщениях о контролируемом пространстве и частоты радиосвязи; - зонах ограниченного использования воздушного пространства; - оперативных пунктах маршрута; - магнитном склонении (в диапазоне широт 70°N - 60°S). 77 При осуществлении зональной навигации с типом RNP-1: - необходимо иметь встроенную базу данных, охватывающую район предстоящего полета с учетом возможности ухода на запасной аэродром; - целостность базы данных должна быть гарантирована; - летный экипаж должен иметь возможность убедиться в том, что база данных загружена правильно; - летный экипаж должен получить информацию о сроке действия базы данных; - разрешение информации должно соответствовать RNP. Для RNP4, 10, 12,6 и 20 использование базы данных не является обязательным, но если она используется, к ней предъявляются требования такие же, как и при RNP-1. Касаясь информации, публикуемой на картах (схемах), необходимо отметить следующее. Если публикуемая процедура требует сертификации ВС по RNP-RNAV, P-RNAV или B-RNAV, это напрямую указывается в ее описании. Для RNP-RNAV всегда указываются численные значения RNP. Кроме этого, карта с зональной процедурой имеет следующую специальную "маркировку", которая означает: - RNAV - процедура может выполняться с использованием оборудования RNAV, работающего от датчиков DME/DME, Basic GNSS или VOR/DME; - RNAV (DME/DME or GNSS) - процедура может выполняться с использованием оборудования RNAV, работающего от датчиков DME/DME или GNSS; - RNAV(DME/DME) - процедура может выполняться с использованием оборудования RNAV, работающего только от датчиков DME/DME; - RNAV(GNSS) - процедура может выполняться с использованием оборудования RNAV, работающего только от датчиков GNSS; - RNAV(DME/DME or GNSS except Class A) - процедура может выполняться с использованием оборудования RNAV, работающего только от датчиков DME/DME или GNSS класса В или С. Примечание. С вводом в действие функциональных дополнений GNSS соответствующие процедуры будут иметь маркировку "ABAS" "SBAS". Полное описание процедуры RNAV предусматривает: - текстуальное описание: - табличное оформление; - графическое представление. Карты (схемы) для летных экипажей содержат: - расстояния между пунктами с точностью до 0,1 м. мили; - значения радиала с точностью в 1° и удаления с точностью 0,1 м. мили до определенных маяков VOR/DME. по которым, если требуется, осуществляется контроль точности работы системы RNAV; - все точки пути процедуры с их кодификаторами; - все радиосредства с частотами и позывными, связанные с данной процедурой; - заданные высоты/зшепоны с дискретностью 100' и скорости IAS в узлах; - путевые углы, от магнитного меридиана с точностью до 1°, а от истинного меридиана с точностью 0.1° [13]. Примечание. Общих требований в отношении публикации ЗПУ не установлено, однако, для участков с указателем окончания траекторий типа TF, CF и т.п., когда линия пути задана путевым углом, его значение публикуется на карте. 79 Заданные высоты и эшелоны на картах указываются следующим образом: Процедуры маневрирования рассчитываются для истинных скоростей, пересчитанных с учетом температуры воздуха, увеличенной в большинстве случаев на 15° относительно стандартной атмосферы, для соответствующей абсолютной высоты маневрирования исходя из приборных скоростей (IAS), указанных в табл. 3.1. В том случае, когда при построении процедуры маневрирования использовалось другое значение IAS, оно публикуется на карте (схеме). Таблица 3.1 Скорости маневрирования, узел [UNNNNNCD] - код дополнительных условий. В коде применяются следующие буквы, цифры и символы: U: А - Altitude AMSL (QNH), F - Flight Level, К - IAS in knots, M - magnetic, T true; NNNNN: - заданное число от 000 до 99999; С: + 'at or above', - 'at or below', пробел - 'at'; D (направление разворота): L - Turn Left, R - Turn Right. Если задано несколько условий, то их коды разделяются точкой с запятой (;). Пример. [А800+; М047; R] - набор до 800' и выше с ЗМПУ 047°, разворот вправо. Пример использования сокращенных текстовых описаний процедур дан в табл. 3.2. Пример представления SID в табличной формы дан в табл. 3.3, захода на посадку и ухода на второй круг - в табл. 3.4. Таблица 3.2 81 Таблица 3.3 Пример кодирования SID в табличной форме Fix Bearing/ Course Path Turn Recommended Range Identifier Flyto Altitude Speed Limit Terminator (Waypoint Over Navaid ° M (° T) Direction Navaid Name) FA RW20 201 (203.3) 400 LUM DF FOKSI R TF PF213 T 345 (346.8) +5000 ОКЕ 330/30 CF TARTO 254 (256.1) +FL100 250 ОКЕ - Vertical Angle - Navigation Performance P-RNAV P-RNAV P-RNAVI B-RNAVI Таблица 3.4 Пример кодирования ухода на второй круг в табличной форме Fix Fly Path Identifier Terminator (Waypoint Over Name) IF TF TF TF FA DF SUSER CV023 CV024 RW35L RW35L SUSER Y Y Vertical Angle/ Course Turn Recommended Threshold Altitude Speed Limit Navaid ° M (° T) Direction Crossing Height +5000 250 LOM 262/29 258 (256.0) 4000 348 (345.8) 2680 150 348 (345.8) 370 -3.0/50 348 (345.8) +770 LOM L +5000 Bearing/ Range to Navaid Navigation Performance RNP 1 RNP 0.3 RNP 0.3 RNP 0.3 RNP 0.3 RNP 1 4. ФРАЗЕОЛОГИЯ РАДИООБМЕНА ПРИ ВЫПОЛНЕНИИ ПРОЦЕДУР RNAV Стандартная фразеология, связанная с RNAV, P-RNAV в RNP RNAV, в полном объеме в документах ИКАО [11, 15, 16] не опубликована. Тем не менее, в разных разделах АИПов некоторых государств публикуется фразеология, которая может применяться диспетчером ОВД и летными экипажами при выполнении процедур RNAV. Вот некоторые из них: С/Р* C P P P Фразеология CONFIRM RNAV (B-RNAV, P-RNAV) APPROVED NEGATIVE RNAV (B-RNAV, P-RNAV) APPROVAL AFFIRM RNAV (B-RNAV, P-RNAV) APPROVAL UNABLE RNAV SID DUE TO RNAV TYPE P C UNABLE RNAV SID CLEARED GEDERN 8 ALFA TRANSITION AND PROFILE C CLEARED GEDERN 8 ALFA TRANSITION С CLEARED DIRECT TO DF274 С CLEARED LAKUT ЗА TRANSITION VIA HK770 DIRECT, RW 04R (first contact) AERO-765 NONRNAV P Содержание фразеологии Запрос на подтверждение допуска к полетам по RNAV (B-RNAV, P-RNAV) Отсутствие допуска RNAV (B-RNAV, РRNAV) Подтверждение допуска RNAV (B-RNAV, P-RNAV) Сообщение диспетчеру DELIVERY при запросе АТС CLEARANCE (ARLANDA) о том, что бортовое оборудование RNAV не сертифицировано по требуемому типу RNP для выполнения SID Сообщение диспетчеру Stockholm Control Разрешено выполнять процедуру GED8A с заданным вертикальным и скоростным режимом Разрешено выполнять процедуру GED8A только в горизонтальном плане, высоты и скорости будут задаваться диспетчером Разрешено следовать на точку DF274 (одну из тактических или стратегических точек процедуры) Разрешено следовать на точку НК770 процедуры LAKUT ЗА (Helsinki) NONRNAV после позывного AERO-765 при первом выходи на связь произносится для информирования диспетчера об отсутствии возможностей RNAV *С - диспетчер, Р - пилот. 83 5. ОБЩАЯ КОНЦЕПЦИЯ СИСТЕМЫ CNS/ATM В ЕВРОПЕЙСКОМ РЕГИОНЕ Внедрение зональной навигации невозможно без совершенствования системы связи, навигации, наблюдения и организации воздушного движения (CNS/ATM). Далее рассмотрено совершенствование CNS/ATM как в целом, так и на примере Европейского региона. В связи с мировым ростом объемов авиаперевозок и наличием успехов в области космических и компьютерных технологий в 1987 г. ИКАО приступила к разработке концепции CNS/ATM. Основная цель концепции CNS/ATM - удовлетворение возрастающих потребностей авиационного сообщества в эффективном использовании воздушного пространства. Основное условие концепции CNS/ATM - сохранение достигнутого и, когда это возможно, повышение уровня безопасности полетов. "Локомотивом" модернизации всей системы аэронавигации в широком смысле этого слова является модернизация ATM в целях повышения гибкости и эффективности использования воздушного пространства и улучшения показателей безопасности и регулярности полетов. Новая организация воздушного движения базируется на основе концепции CNS. Модернизация ATM является обоснованием инвестиций в модернизацию CNS, МЕТ и AIS. Отставание CNS от ATM в принципе недопустимо. Примечание. Европейский регион включает обширные континентальные районы с низкой плотностью движения (Российская Федерация), где имеет место нехватка систем CNS. В некоторых местах радиолокационный контроль отсутствует, а работа диспетчеров основывается на докладах летного экипажа о месте, высоте полета и расчетном времени прохождения очередных пунктов. Это приводит к применению завышенных интервалов эшелонирования, что снижает пропускную способность и эффективность использования воздушного пространства. В таких районах Европейского региона развитие CNS должно опережать модернизацию ATM. Модернизация системы CNS/ATM требует инвестиций государств, международных институтов и авиакомпаний. От преимуществ новой ATM в конечном итоге выиграют все пользователи воздушного пространства и все инвестиции со временем окупятся. Недостатки существующей системы ATM в Европейском регионе следующие: 1) недостаточная гибкость и эффективность использования воздушного пространства из-за большого количества национальных границ сложной конфигурации; 2) в центральной и западной части региона системы ATS находятся на пределе пропускной способности, что приводит к неприемлемому количеству и времени задержек; 3) в других частях региона наличие сегментации при полетах на маршруте и в районе аэропортов препятствует оптимизации ресурсов ATS; 4) отсутствие средств наблюдения (радиолокационного контроля) на больших территориях восточной части региона; 84 5) различия в процедурах ATS и нормах эшелонирования приводят к изменению профилей полета на границах районов полетной информации; 6) отсутствие координации в предоставлении существующих систем CNS, ведущее к дублированию ресурсов и обслуживания; 7) низкое качество средств связи и языковые трудности в восточной части региона. Цели модернизации системы ATM в Европе формулируются следующим образом: 1) поддержание или повышение существующего уровня безопасности полетов; 2) увеличение пропускной способности системы и использование всех ресурсов ATM для удовлетворения спроса на авиаперевозки; 3) динамичное использование предпочтительных для пользователя трехмерных и четырехмерных траекторий полета; 4) предоставление равных возможностей на полеты всех типов ВС; 5) повышение эффективности системы в части предоставления аэронавигационной и метеорологической информации пользователям; 6) расширение навигационных возможностей ВС, позволяющих совершенствовать схемы вылета и захода на посадку; 7) более активное участие пользователей в процессах принятия решения при ATM, включая диалог компьютеров "воздух - земля" при согласовании параметров полета; 8) создание в максимально возможной степени сплошного и просто устроенного воздушного пространства, одинаково понятного и доступного для всех пользователей; 9) организация воздушного пространства в соответствии с правилами и процедурами, применяемыми в ATM; 10) корректировка расписаний в целях создания эффективных потоков движения и оптимизации нагрузки аэропортов, сведение к минимуму задержек вылета и времени полета в зоне ожидания; 11) интеграция элементов МЕТ и AIS в будущую систему ATM с целью повышения эффективности ATM и предоставления пользователям информации в реальном времени; 12) совершенствование стратегического планирования ATS в целях предотвращения возникновения конфликтных ситуаций и повышение тактической маневренности системы ATS при разрешении конфликтных ситуаций. Направления модернизации ATM, требующие модернизации CNS, следую- щие: 1) повышение уровня и эффективности обмена данными между эксплуатантами, воздушными судами и органами ATS (ATN с использованием VDL, AMSS, CPDLC, ACARS); 2) расширение функции наблюдения путем использования информации о местоположении воздушных судов, получаемой от бортовых систем (ADS, ADS-B для целей ATS); 3) расширение возможностей наземных систем обработки данных, что позволит: - повысить точность навигации в четырех измерениях (GBAS, 4D RNP); 85 - более активно применять предпочтительные для авиакомпаний профили полета на всех этапах полета (RNAV, VNAV, TNAV); - расширить возможности обнаружения конфликтных ситуаций в полете (ADS) и на земле (A-SMGCS), автоматической передачи рекомендаций экипажу по предотвращению столкновений (типа RA TCAS) и быстрой адаптации к меняющейся воздушной обстановке (повышение уровня Mode S). Выполненные и текущие проекты плана модернизации ATM в Европе: TCAS OPS - обязательность использования бортовых систем TCAS; RVSM - сокращенный минимум вертикального эшелонирования; 8.33 - введена сетка частот 8.33 кГц; URD - документ о требованиях пользователя ATM. Основные направления совершенствования связи в Европейском регио- не: 1) ведена сетка частот с дискретностью 8,33 кГц, что позволило использовать большее количества каналов речевой связи и обмена данными в УКВ диапазоне; 2) получен первый опыт использования AMSS для обмена данными и речевой связи в некоторых частях региона; 3) в районах с высокой плотностью движения планируется введение линии передачи данных с использованием ответчика Mode S; 4) начало использования ATN для обмена цифровыми данными по разнотипным линиям связи "земля - земля" и "воздух - земля" между летными экипажами, диспетчерами ОВД, эксплуатантами, службами аэропортов и т.д. Существующая наземная система связи (сеть авиационной фиксированной электросвязи AFTN) является ограниченной с точки зрения пропускной способности, целостности данных, способности обрабатывать различные формы цифровых сообщений и осуществлять обмен данными. Предусмотрена эволюция этой системы в полномасштабную сеть авиационной электросвязи ATN, в основу которой положена модель взаимосвязи открытых систем Международной организации по стандартизации (ISO-OSI). Сеть ATN состоит из множества "подсетей". Пользователь получает доступ к ATN через одну или несколько подсетей, которые соединены трассировщиками ATN. Трассировщики ATN могут быть подвижными (бортовыми) или фиксированными (наземными). Трассировщик ATN находит адресат через подсети с помощью установленных пользователем параметров связи. Пользователям оконечными системами не требуется информация о зоне действия и процедурах связи в той или иной подсети. Внедрение новых технологий согласно ARINC 622 для цифровых систем передачи данных, например, систем связи воздушных судов для адресации и передачи сообщений (ACARS), может принести значительные выгоды для ATM. В нескольких государствах начата работа по внедрению наземных средств ATS, основанных на ARINC 622 и позволяющих уже на раннем этапе использовать бортовые комплекты CNS. Однако, в планах внедрения признается, что целью является полномасштабный переход на ATN, а применение технических требований ARINC 622 - это лишь промежуточный этап, призванный обеспечить скорейшее получение выгод от уже существующих технологий в сфере CNS/ATM. Дальнейшая модернизации связи в Европе предусматривает внедрение: ODIAC - эксплуатационные требования для обмена данными ATM "воздух земля"; 86 Link 2000 + - линии передачи данных "воздух - земля" (2 VDL и ATN); ASTERIX - универсальная система обмена радиолокационной информацией AT-S; PETAL II - предварительные испытания линии передачи данных "воздух - земля"; WACS - беспроводная система связи между службами аэропорта; Mode S - использование информации ответчиков S. Навигация. Для Европейского региона характерно следующее развитие: 1) постепенное расширение применения RNAV: P-RNAV, RNP-RNAV; 2) интенсивное использование GNSS для навигации воздушных судов в дополнение к вычислителям RNAV по VOR, DME, LORAN-C и INS; 3) внедрение Всемирной геодезической системы WGS-84; 4) постепенное снятие с эксплуатации навигационных средств NDB и VOR. Примечание. Ожидается, что средства DME сохранятся в эксплуатации в течение длительного времени для дальномерной поддержки оборудования RNAV на основе GNSS. Дальнейшие направления модернизации навигации в Европе предусматривают: - введение P-RNAV; - создание европейской навигационной службы GNSS - EGNOS; - создание европейской системы GNSS GALILEO. функционального дополнения Наблюдение. Для Европейского региона предполагаются следующие направления развития: - обязательное использование для ATS ответчиков А и С, а в ближайшем будущем Mode S в некоторых узловых диспетчерских районах и районах континентального воздушного пространства с высокой плотностью движения; - использование ADS-B в некоторых частях региона (над Северным морем и в континентальном воздушном пространстве Российской Федерации); - сокращение использования первичных радиолокаторов за пределами ТМА. Системы SSR (при необходимости дополненные Mode S) будут по-прежнему использоваться в узловых диспетчерских районах и в некоторых районах воздушного пространства с высокой плотностью движения. Объем использования первичных радиолокаторов будет уменьшаться. Внедрение линий передачи данных "воздух - земля" наряду с достаточно точными и надежными бортовыми навигационными системами позволяет предоставлять информацию о месте ВС в тех районах, где невозможен радиолокационный контроль полета или необходимы крупные инвестиции для его осуществления. При осуществлении функции ADS в целях ATS с борта ВС по линии передачи данных автоматически передается информация, полученная от бортовых навигационных систем. Как минимум, эта информация содержит данные о местоположении в четырех измерениях. По мере необходимости может предоставляться и дополнительная информация (вектор скорости, курс, крен, тангаж, активный план полета). 87 Данные ADS будут использоваться автоматизированными системами ATS для предоставления информации диспетчеру ОВД. Помимо районов, в которых единственным видом информации о движении являются донесения пилотов о местоположении, ADS будет полезным, и в районах с высокой плотностью движения, где ADS можно использовать в качестве дополнительной и/или резервной по отношению к SSR. Кроме того, при определенных обстоятельствах этот вид обслуживания в будущем может даже заменять вторичный радиолокатор. Планируемые проекты по модернизации наблюдения в некоторых Европейских государствах: ARTAS - система слежения и наблюдения ATM; Mode S - использование сигналов ответчиков S: ADS - автоматическое зависимое наблюдение; ADS-B - автоматическое зависимое наблюдение в режиме вещания. Основные положения Европейской аэронавигационной региональной стратегии вкпючают следующее: 1) принимая во внимание, что: Глобальный план ИКАО по системам CMS/ATM призван обеспечить повышение безопасности, пропускной способности, эффективности и экономичности полетов; - Европейская региональная аэронавигационная стратегия обеспечивает общую унифицированную и интегрированную основу, которая позволит реализовать в период с 2000 по 2015 год эволюцию европейских аэронавигационных систем в соответствии с Глобальным планом ИКАО; - национальные планы государств по выполнению обязательств по внедрению аэронавигационных систем должны соответствовать Европейской региональной аэронавигационной стратегии и связанному с ней Региональному плану перехода к CMS/ATM; 2) учитывая: - существующая европейская аэронавигационная система с ее недостатками в техническом, эксплуатационном и экономическом плане, несмотря на уже проведенные мероприятия по усовершенствованию, не способна справиться с растущей потребностью в пропускной способности, особенно в западной части региона (к 2015 году объемы воздушного движения в Европейском регионе более чем удвоятся по сравнению с 1997 г.); - необходимость оснащения воздушных судов новым электронным оборудованием определяется заблаговременно в процессе подробных консультаций с пользователями и на основе требований к безопасности полетов; - существует потребность в программе поэтапного внедрения, которая обеспечит получение важного опыта эксплуатации новых систем на как можно более раннем этапе; - существует необходимость в скорейшей реализации преимуществ как для пользователей, так и для провайдеров новых систем; - существует глобальный рост спроса на спектр радиочастот, используемых для целей гражданской авиации; Европейская аэронавигационная стратегия предусматривает: - повышение уровня безопасности полетов, увеличение пропускной способности воздушного пространства, рост эксплуатационной эффективности, повышение 88 эффективности использования радиочастотного спектра и эффективное использование уже имеющихся и нарождающихся технологий CNS/ATM; - внедрение единых и более строгих стандартов, правил и практики (процедур) безопасного выполнения и обслуживания полетов; - организацию воздушного пространства, как непрерывной среды "от перрона до перрона", а также рентабельных скоординированных служб ATM, отвечающих потребностям пользователей и структурно связанных с их деятельностью; - деление Европейского региона ИКАО на 9 однородных районов с разной интенсивностью и сложностью воздушного движения и с разными потребностями и возможностями модернизации системы. Внедрение Регионального плана перехода к системам CNS/ATM в этих 9-ти однородных районах будет происходить с различными темпами и инфрастуктурой; Примечание. Согласно Европейскому плану, различные регионы и даже воздушные трассы России входят в 6 из 9-ти однородных районов, но с пометкой "подлежит определению". Такие же пометки из 49 стран региона имеют Украина, Туркменистан и Казахстан. - решение вопросов перехода между однородными районами внутри Европейского региона, а также между другими регионами ИКАО; - балансировку инфраструктуры системы (согласование технических требований и сроков внедрения элементов CNS/ATM, процедуры, обучение персонала, сертификация); - стимулирование скорейшего внедрения новых систем в районах с менее развитой инфраструктурой, избегая крупных капиталовложений в действующие в этих районах системы, основанные на старых технологиях и не имеющие перспектив в будущем. Организации, контролирующие внедрение CNS/ATM в Европе: - EANPG - группа аэронавигационного планирования Европейского отделения ИКАО -- общее управление внедрением Европейского аэронавигационного плана, координация программ и деятельности 49-ти государств региона, других организаций и групп с целью соблюдения всеми участниками рамок Глобального плана, целостности и совместимости систем CNS/ATM; - ЕСАС (ЕКГА) - Европейская конференция гражданской авиации - аэронавигационное планирование в рамках соответствующей географической зоны и компетенции; - ЕВРОКОНТРОЛЬ - Европейская организация по безопасности аэронавигации - процессы планирования и внедрения в западной части региона, координация коллективных действий западных государств; - JAA -- Объединенная авиационная администрация Европы - стандарты, правила сертификации, инструктивные указания по аспектам, связанным с CNS/ATM и затрагивающим деятельность авиакомпаний; - ARINC - Европейское отделение - непосредственное внедрение некоторых систем и части инфраструктуры CNS/ATM по поручению ИКАО, ЕКГА, Евроконтроля; - GATE -- подгруппа EANPG - модернизация и обеспечение согласованного планирования при внедрении систем CNS/ATM в восточной части Европейского региона ИКАО, включая Среднюю Азию. Россия входит в GATE и участвует в ее работе ; 89 - ANT - Airspace Management and Navigation Team - Группа Евроконтроля, занимающаяся организацией воздушного пространства и развитием навигации в Европейском регионе в соответствии с политикой и программами ЕСАС и Евроконтроля. Имеет специальный сайт www.ecacnav.com и отдел по взаимодействию с эксплуатантами - AMN USC. Планы и программы внедрения CNS/ATM в Европе. 1. Глобальный аэронавигационный план применительно к системам CNS/ATM, ИКАО, 1998 г. - обновленный и доработанный вариант "скоординированного на глобальном уровне плана перехода к системам CNS/ATM ИКАО", подготовленного FANS в октябре 1993 года. 2. "Стратегия ATM 2000 +" - включает цели и принципы "высокого уровня" в вопросах модернизации ATM Европы до 2015 года (разработана ЕКГА, январь 2000 г.). 3. Региональный "План перехода к системам CNS/ATM в Европейском регионе ИКАО. Версия V1.1", EANPG, октябрь 2002 г. - детальный рабочий документ, согласованный с Глобальным Планом и "Стратегией ATM 2000 +". 4. ЕАТМР - Европейская программа организации воздушного движения, Евроконтроль - планирование по отдельным аспектам аэронавигации для западной части Европейского региона. 5. ECIP - Европейский план конвергенции и внедрения - основания и рамки согласованных совместных действий государств - членов ЕКГА, участвующих в Европейской программе организации воздушного движения (ЕАТМР), по реализации целей высокого уровня, принципов и эксплуатационных усовершенствований, содержащихся в документе "Стратегия ATM 2000+". 6 CIP - Конвергенция и внедрение, Евроконтроль - подробная информация о процессах согласования и интеграции применительно к государствам ЕКГА. 7 GATE SAP - документ по стратегическому планированию ATM в восточной части Европейского региона ИКАО, вкпючая Среднюю Азию. 8. Программа и план модернизации навигации в странах ЕКГА - рабочие документы группы ANT Евроконтроля по вопросам концепции, стратегии, планов развития и освоения новых навигационных технологий и процедур в рамках внедрения CNS/ATM в странах ЕКГА и в обеспечение духа и буквы европейской "Стратегия ATM 2000 +". 9. Государственные ппаны перехода к системам CNS/ATM. Большинство государств, в том числе и Россия, утвердили и опубликовали эти планы в своей стране. В частности, в России Постановлением Правительства РФ от от 5 декабря 2001 г. № 848 утверждена Федеральная целевая программа "Модернизация транспортной системы России" (2002 - 2010 гг.), (www.gsga.ru раздел ОрВД). Частью этой Федеральной программы является Подпрограмма "Единая система организации воздушного движения", в главе 3 которой определены цели, задачи, сроки и этапы реализации Подпрограммы. Сроки и этапы реализации Подпрограммы. "Подпрограмма рассчитана на период 2002-2010 г.г. и предусматривает два этапа. Первый этап (2002-2005 гг.): обоснование и переход от существующей ЕС ОрВД к Федеральной аэронавигационной системе России, разработка нормативноправового, технического, организационного и экономического аспектов создания национальной перспективной системы организации воздушного движения. 90 Второй этап (2006-2010 г.г.): внедрение воздушного движения и систем СNS/ATM. передовых технологий организации Примечание. Обязательства России перед ИКАО включены в Европейский региональный план перехода к системам CNS/ATM и опубликованы на английском и русском языках. В частности, переход России на WGS 84 запланирован на конец 2003 года (на момент издания книги переход не начат), а начало использования ADS-B в ОВД России - 1 октября 2005 г. Стратегия развития навигации в странах ЕКГА. Глазные стратегические направления развития навигации: 1) переход на методы зональной навигации с различными типами RNP во всем воздушном пространстве всех стран ЕКГА; 2) внедрение концепции свободного полета ' free routes/flight'; 3) обеспечение права выполнять полеты на самолетах с меньшими навигационными характеристиками до тех пор, пока это возможно; 4) внедрение методов 4D RNAV для обеспечения перехода к организации ATM "от перрона до перрона" к 2015 году; 5) предоставление информации о местоположении и навигационных данных с точностью и в форматах, требуемых для обеспечения различных систем инфраструктуры СNS/ATM. 6) целенаправленное развитие спутниковой и рационализация наземной поддерживающей инфраструктуры, обеспечивающей переход на навигацию по GNSS на всех этапах полета в соответствии с рекомендациями ИКАО. Учитывая технические, правовые и временные аспекты тотального перехода на GNSS, наличие традиционных средств радионавигации в обозримом будущем будет необходимым, для подстраховки при использовании спутниковой навигации. Временная шкала стратегии разделена на три временных фазы, согласующихся с другими стратегиями Евроконтроля: - краткосрочная - 2000-2005 гг.; - среднесрочная - 2005-2010 гг.; --долгосрочная - 2010-2015 гг. и далее. В краткосрочной фазе (до 2005 г.) развитие навигации будет сфокусировано на зоне аэродрома (ТМА) и основываться на существующих навигационных возможностях и инфраструктуре. Это наименее затратный период для авиакомпаний, поскольку планируется повышение эффективности эксплуатации имеющегося оборудования самолетов. Однако результат от такого развития навигации может быть ограничен существующими возможностями ATM и их способностью обслуживать "смешанные" полеты RNAV + Non RNAV с различными навигационными возможностями воздушных судов. В среднесрочной фазе (2005 - 2010 гг.) развитие будет основано на более передовых навигационных возможностях воздушных судов для повышения вместимости воздушного пространства. Вначале навигационная инфраструктура будет рассчитана на "смешанные" полеты RNAV + Non RNAV, но со временем в целях унификации процедур ОВД возможно введение обязательных требований P-RNAV или RNP RNAV в районах с плотным движением ВС. Эта фаза развития относится к мало- и среднезатратному периоду для авиакомпаний. В долгосрочной фазе (2010-2015 гг. и далее) ожидается, что эксплуатационная концепция будет построена на четырехмерной зональной навигации 4D RNP-RNAV с различными типами RNP для разных районов и этапов попета. Это высоко- 91 затратный период для авиакомпаний, поскольку потребуется дорогостоящее новое оборудование и его обслуживание. Конкретные проекты в области навигации в Европе даны в табл. 5.1. Таблица 5.1 Введение P-RNAV в ТМА Европейских аэропортов На 30-м совещании группы Евроконтроля ATN 25-27 февраля 2003 г. принято решение о внедрении в ТМА основных аэропортов ЕКГА с ноября 2004 г. (крайний срок - апрель 2005 г.) RNAV SID, RNAV STAR и RNAV IAP (от IAP до FAP), построенных по критериям зональной навигации. При этом, если траектория полета по таким процедурам пролегает: 1) выше MSA и обеспечивается запас высоты над препятствиями в соответствии с критериями полета по маршруту, то для их выполнения достаточно иметь оборудование и разрешение на полеты B-RNAV; 2) ниже MSA либо запас высоты над препятствиями не соответствует критериями полета по маршруту, то для их выполнения требуется иметь оборудование и разрешение на полеты P-RNAV. 92 Евроконтроль рассматривает P-RNAV как важную, но промежуточную и краткосрочную ступень на пути к будущему введению требований RNP-RNAV. При этом внедрение P-RNAV не должно расцениваться как обязательное требование для выполнения полетов в Европейских ТМА. Эксплуатантам, не имеющим соответствующего оборудования на воздушных судах и разрешений, будет предоставлена возможность продолжать полеты, тем более, что в части ТМА Европы может вообще не требоваться RNAV. Однако следует учитывать, что после введения новых процедур RNAV возможно введение ограничений на "смешанные" полеты RNAV - Non RNAV для обеспечения пропускной способности и единообразия процедур ATS в ТМА с интенсивным воздушным движением. Часть процедур RNAV в ряде Европейских аэропортах уже требуют P-RNAV (например - Хельсинки), в то же время ожидается существенное увеличение количества таких процедур еще до ноября 2004 г. Государства и органы ОВД, планирующие расширение процедур P-RNAV в своих ТМА, намерены выпускать соответствующие циркуляры аэронавигационной информации. 93 Литература 1. Руководство по требуемым навигационным характеристикам. Doc 9613, Монреаль, ИКАО, изд. 2. 1999. 2. JAA Administrative & Guidance Material, Section One: General Part 3: Temporary Guidance Leaflets LEAFLET № 10: AIRWORTHINESS AND OPERATIONAL APPROVAL FOR PRECISION RNAV OPERATIONS IN DESIGNATED EUROPEAN AIRSPACE (JAA TGL10). (Одобрение (подтверждение) технических характеристик оборудования ВС и эксплуатационных процедур для выполнения полетов в режиме точной зональной навигации в специально обозначенных районах воздушного пространства Европы). 3. RTCA, inc. Document No. RTCA/DO-208, "Minimum Operational Performance Standards for Airborne Supplemental Navigation Equipment Using Gloioal Positioning System (GPS)," dated July 1991. 4. Review of the General Concept of Separation Panel, RGCSP/9-WP25 Appendix A to Report on Agenda Item 2, Proposed amendment to Annex 11. 1998. 5. Area Navigation Equipment Operational Requirements and Functional Requirements, Doc 003-93, EUROCONTROL. 6. Required Navigational Performance (RNP) Instrument Approach Procedure Construction, Order 8260.RNP. FAA, USA. 2002. 7. Доклад особого специализированного совещания по связи и производству полетов (SP COM/OPS/95). Doc 9650 Монреаль, ИКАО. 1995. 8. О введении в действие Рекомендаций по подготовке воздушных судов и эксплуатантов гражданской авиации России к полетам в системе точной зональной навигации P-RNAV в Европейском регионе по требованиям RNP1. Распоряжение № НА-21-р от 04.02.2003, Минтранс РФ, М. 9. Руководство по требуемым навигационным характеристикам. Doc 9613, изд.1, Монреаль, ИКАО, 1994. 10. TSO С 129 - Airborne Supplemental Navigation Equipment Using Global Positioning System (GPS) - 10 December 1992. USA, Washington, 1993. 11. Приложение 11. Обслуживание воздушного движения. 13-е изд., вкл. поправку 40. Монреаль, ИКАО, 2001. 12. Производство полетов воздушных судов. Том 2. Правила производства полетов. Doc 8168, вкл. поправку 12. Монреаль, ИКАО. 1993. 13. Guidance Materia! for Design of Terminal Procedures for Area Navigation (DME/DME, B-GNSS, Baro-VNAV & RNP-RNAV. 14. Navigation System Data Base. ARINC Specification 424. 15. Дополнительные региональные правила. Doc 7030, вкл. поправку 203. Монреаль, ИКАО. 1987. 16. ATM - Организация воздушного движения, Doc 4444, изд. 14-е, Монреаль, ИКАО, 2001. 17. Приложение 10. Авиационная электросвязь. Т.I (Радионавигационные средства). 5-е изд., Монреаль, ИКАО, 1996, вкл. поправку 77. 18. EUROCAE ED 75. Minimum Aviation System Performance Standards (MASPS) for Required Navigation Performance for RNP Area Navigation. 19. Minimum Aviation System Performance Standards: Required Navigation Performance for Area Navigation. RTCA DO 236A/EUROCAE ED-75. 20. GLOBAL POSITIONING SYSTEM. Standard Positioning Service. Performance Standard. Department of Defense USA. Washington. DC 20301-6000, October. 2001. 94 Приложение НОРМАТИВНЫЕ ДОКУМЕНТЫ, СОДЕРЖАЩИЕ ВОПРОСЫ ЗОНАЛЬНОЙ НАВИГАЦИИ 1. НЕКОТОРЫЕ ПОЛОЖЕНИЯ ДОКУМЕНТА JAA TGL10 Материал документа [2] относится к введению зональной навигации в рамках европейской Air Traffic Management Programme (EATMP) и должен применяться с учетом Doc 003-93 Евроконтроля [5], разделами: Оборудование зональной навигации. Функциональные требования и эксплуатационные требования. Инструктивные указания документа [2] соответствуют публикациям Евроконтроля [5] в отношении функциональных и эксплуатационных требований, а также принципам разработки: зональных процедур в районе аэродрома, основанных на DME/DME и GNSS. Эксплуатант может использовать и другие способы (методы) подтверждения соответствия при условии, что они соответствуют основным положениям документа [2] и утверждены полномочным органом государства. Инструктивные положения включают технические и эксплуатационные критерии для навигационных систем P-RNAV. Эти положения оговаривают основные сертификационные позиции, включая функциональные требования, точность, целостность, непрерывность обслуживания, условия и ограничения при эксплуатации. Положения документа [2] применяются для выполнения процедур P-RNAV в районе аэродрома и, если государство приняло соответствующее решение, для навигации на маршруте. В рамках этого документа процедуры P-RNAV включают в себя выполнение схем вылета, прибытия и захода на посадку до точки начала конечного участка захода на посадку (FAWP). Защита от препятствий при выполнении процедур P-RNAV вплоть до точки FAWP строится на основании предпосылки, что ВС по точности навигации соответствует требованиям P-RNAV. При этом необходимо учитывать, что точность навигации, требуемая в конце промежуточного участка захода на посадку, соответствует значению конечного участка захода на посадку. Конечный участок захода на посадку, а именно от FAWP до торца ВПП, и соответствующий маневр ухода на второй крут рассмотрены в документах [6, 12, 13], в которых также рассмотрена и концепция RNP-RNAV. Процедуры ожидания в ближайшем будущем предполагается выполнять обычным способом. Применение P-RNAV касается требований в отношении точности выдерживания заданных линий положения и не оговаривает всех прочих аспектов требуемых навигационных характеристик (RNP), концепция которых опубликована в документах [ 1 ,7]. В [2] оговариваются эксплуатационные аспекты вертикальной навигации, но не даются сертификационные критерии для таких систем, поскольку способность системы решать задачи вертикальной навигация не является обязательной для системы P-RNAV. Системы и процедуры, ранее сертифицированные по B-RNAV, должны быть подвергнуты анализу с целью определить - требуются или нет дополнительные действия для сертификации по P-RNAV. Далее дан перевод текста раздела 5 документа [2]. 95 5. Описание навигационных систем P-RNAV 5.1. Навигация в горизонтальной плоскости 5.1.1. Для навигации в горизонтальной плоскости бортовое оборудование RNAV позволяет выполнять предписанные инструкции и выдерживать маршрут из точек пути, хранящихся в бортовой базе данных. 5.1.2. В рамках настоящего Материала выполнение полета P-RNAV предусматривает использование такого оборудования RNAV, которое автоматически определяет горизонтальные координаты ВС по следующим навигационным датчикам (без каких-либо приоритетов и последовательности): 1) дальномерное оборудование, работающее по двум и более наземным маякам (DME/DME); 2) высокочастотное угломерно-дальномерное оборудование, работающее по совмещенному маяку VOR/DME, если такой маяк определен как удовлетворяющий требованиям для выполнения данной процедуры; 3) глобальная навигационная спутниковая система (GNSS); 4) инерциальные навигационные системы (INS или 1RS) с автоматической коррекцией от подходящей радионавигационной системы. ПРЕДУПРЕЖДЕНИЯ: 1) LORAN-C не может быть навигационным датчиком для выполнения процедур в районе аэродрома; 2) маяк TACAN может включаться в бортовую базу данных и использоваться совместно с маяком DME при условии, что он соответствует Стандартам Приложения 10 ИКАО и включен в АИП; 3 ) термин GNSS означает систему GPS (Министерства обороны США) с барометрической поддержкой работы и функцией RAIM либо GPS с бортовой системой функционального дополнения ABAS или спутниковой системой функционального дополнения SBAS, например, EGNOS (см. также JAA TGL 3 версия 1, Приложение А, пункты 2.4 и 2.5); 4) ограничения на использование инерциальных данных в целях определения координат во время коротких периодов времени, когда невозможно производить коррекцию по радионавигационным системам, подробно приводятся в п. 8.4. 5.1.3. Вычислитель системы рассчитывает такие навигационные параметры, как пеленг к расстояние от текущего места до пункта маршрута (WPT), положение относительно линии заданного пути, выводит на индикацию и в системы управления информацию и сигналы, позволяющие выдерживать заданную траекторию полета. 5.2. Вертикальная навигация Настоящим Материалом не устанавливаются сертификационные критерии для систем вертикальной навигации, поскольку она не является обязательной для P-RNAV. Перевод текста разделов 6 и 7 дан с небольшими сокращениями. 6. Технические характеристики бортовых систем Р- RNAV 6.1. Точность Точность выдерживания траектории бортовой системой P-RNAV в горизонтальной плоскости в течение 95% летного времени должна быть не менее ±1.0 м. мили. 96 Точность выдерживания линии заданного пути зависит от ошибки навигационной системы (суммы ошибки в расчете заданной траектории, ошибки определения координат и ошибки при выводе информации на индикацию) и погрешности пилотирования - FTE. Это соответствует требованию поточности RNP-1 и RNP-1 RNAV. 6.2. Целостность В отношении самой бортовой системы: вероятность одновременного появления на индикаторах обоих пилотов опасно ложной навигационной информации или ошибочного положения относительно заданной траектории должна быть исключена. В контексте выполнения процедур P-RNAV в районе аэродрома термин опасно должен интерпретироваться как появление ложной или ошибочной навигационной информации без своевременного предупреждения летного экипажа либо, если таких предупреждений нет, ложность или ошибочность которой летный экипаж может не распознать. Понятие исключена является смягченным вариантом действующего понятия категорически исключена, используемого в документах JAA в отношении выполнения процедур вылета, прибытия и захода на посадку. Такой подход при разработке процедур P-RNAV является консервативным, но он соответствует принципам построения процедур PANS-OPS, критериям эшелонирования PANS-RAC и не повышает существующий сегодня уровень рисков при использовании воздушного пространства. Понятие категорически исключена будет применяться в отношении конечного участка точного захода на посадку, т.е. от FAWP до точки ухода на второй круг (MAP). Возможности систем, сертифицированных по RNP, превышают требуемые для выполнение полетов P-RNAV. Такие системы обеспечивают более высокий уровень встроенного контроля целостности навигационной информации и обеспечивают летному экипажу возможность контролировать расчетную погрешность определения координат, что придает ему уверенность в точности работы системы. 6.3. Непрерывность обслуживания В отношении самой бортовой системы должно быть подтверждено, что: (a) вероятность потери всей навигационной информации должна быть исключена; (b) вероятность невосстанавливаемой потери всех навигационных функций и возможности ведения связи должна быть категорически исключена. ПРЕДУПРЕЖДЕНИЕ. В дополнение к требованиям к оборудованию' ВС для полетов по ППП согласно JAR-OPS 1, Sub-part L требуется как минимум одна система зональной навигации. 7. Функциональные критерии к системам P-RNAV 7.1. Обязательные функции № Описание функции 1 Индикаторы боковых отклонений (CDI, HSI), табло "TO/FROM" табло отказов, используемые в качестве основных приборов для навигации, вписывания в ЛЗП при выполнении разворотов, определения состояния оборудования (отказы, режимы, целостность информации) должны быть в поле зрения пилота при его взгляде "по полету". Ориентация горизонтальной планки навигационного прибора должна производиться автоматически по рассчитанному в вычислителе RNAV значению заданного путевого угла. Масштаб индикатора боковых отклонений должен соответствовать этапу полета и может управляться как программно вычислителем, так и по значениям (RNP), получен– 97 № 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Описание функции ным из навигационной базы данных. Масштаб индикатора должен быть понятен, экипажу либо его текущее значение экипаж может легко узнать. Для P-RNAV приемлемым считается масштаб отклонений планки горизонтального положения ВС относительно ЛЗП ± 1 м. миля (крайние положения). Приемлемой альтернативой этим требованиям является наличие навигационного дисплея, хорошо видимого летным экипажем, с подходящим масштабом отображения и дающего адекватное представление о боковых уклонениях. Управление масштабом такого дисплея может производиться вручную. Возможность непрерывного отображения на одном из основных приборов активного управления, используемых пилотом, рассчитанных вычислителем RNAV значений заданного путевого угла и бокового уклонения относительно ЛЗП Для экипажа из двух пилотов - возможность пилота, не управляющего ВС, контролировать положение ВС относительно ЛЗП База данных, содержащая действующую навигационную информацию, официально опубликованную для гражданской авиации, должна обновляться в соответствии с циклом AIRAC, и из нее должны активизироваться процедуры RNAV. Хранящиеся данные должны иметь разрешение, соответствующее требованиям по точности выдерживания заданных траекторий. База данных должна быть защищена от возможного изменения пользователем. Летный экипаж должен иметь возможность проверять срок действия базы данных Летный экипаж должен иметь возможность проверять хранящуюся в базе данных процедуру вплоть до координат каждого WPT и навигационного средства Процедура из базы данных должна активизироваться целиком - одновременно все точки в их последовательности В поле зрения пилота либо на легко доступной и хорошо видимой странице дисплея должна быть обеспечена возможность контроля используемого типа датчика и параметр, позволяющий определить точность системы в данный момент Индикация имени пункта наведения должна быть либо в поле зрения пилота, либо на легко доступной и хорошо видимой странице дисплея Индикация пеленга и расстояния до пункта наведения должны быть в поле зрения пилота. Когда это практически невозможно, эти данные должны выводиться на легко доступную и хорошо видимую страницу дисплея Индикация путевой скорости и времени полета до пункта наведения должны быть либо в поде зрения пилота либо на легко доступной и хорошо видимой странице дисплея Согласно эксплуатационным процедурам, когда это требуется для контроля точности, на дисплее отражается индикация численного значения бокового отклонения с дискретностью 0.1 м. Мили. Осуществляется автоматическая настройка на маяки VOR и DME, используемые системой для определения координат, и возможность блокирования автоматической настройки (деселекции) экипажем Осуществляется автоматический выбор системой RNAV оптимальных датчиков, тесты встроенного контроля, контроль целостности и возможность ручного управления этими функциями Выполнение полета "ПРЯМО-НА" Автоматическая смена участков маршрута и соответствующая индикация для экипажа 98 17 18 19 20 21 Описание функции Возможность выполнять маневры в соответствии с процедурами из базы данных, включая развороты типа "Fly-by" и "Fly-over". Возможность выполнять маневры и выдерживать следующие типы траекторий согласно АRINС 424: - Initial Fix (IF) - выход в точку начала захода на посадку; - Track between Two Fixes (TF) - полет по линии, соединяющей две точки; - Course to a Fix (CF) - полет на заданную точку с заданным путевым углом; - Course from a Fix to an Altitude (FA) - полет от заданной точки с заданным путевым углом до достижения заданной высоты; - Direct to a Fix (DF) - полет от текущего места прямо на заданную точку Индикация отказа системы RNAV, включая отказ соответствующих датчиков, должна быть в поле зрения пилота Для мультисенсорных систем RNAV: автоматический переход на резервный датчик при отказе основного. Примечание. Это не ограничивает, возможности ручного выбора навигационного датчика Индикация навигационной информации от дублирующих систем в целях перекрестного контроля работы основной системы 7.2. Рекомендуемые функции № Описание функций 1 Режим "полет по параллельному маршруту (РТК)" со смещением как минимум до ± 20 м. миль и с дискретностью задания смещения - 1 м. миля. Режим такого полета должен четко индицироваться. При этом система должна выдавать навигационные параметры (отклонение и оставшееся расстояние) относительно смещенной линии пути и смещенного пункта наведения. Режим не должен сохраняться при замене маршрута и после прохождения точки начала захода на посадку, не должен создавать неприемлемую геометрию траектории полета. До прохождения конца смещенного участка экипажу должна выдаваться заблаговременная информация таким образом, чтобы он мог успеть вернуться к исходному маршруту. После включения режима смещения он должен сохраняться при полете вдоль основного маршрута до тех пор, пока не будет отмен автоматически либо экипажем - ручной отменой самого режима или включением задачи "ПРЯМО-НА" 2 Связь системы RNAV с автопилотом или директорным режимом управления ВС с четкой индикацией включения такой связи 3 Режим вертикальной навигации с использованием барометрической высоты 4 Для систем RNAV, работающих от датчиков DME/DME и с поддержкой от IRS, возможность выставки (коррекция) координат по торцу ВПП перед взлетом и возможность вводить величину смещения от торца в случае, когда взлет производится не от начала ВПП Индикация режима системы RNAV должна быть в поле зрения пилота 6 Выполнение следующих маневров согласно ARINC 424: - HM - Holding Pattern to a Manual Termination - ожидание с принудительной (ручной) отменой; 99 Oписание функций - НА Holding Pattern to an Altitude - ожидание с отменой при достижении заданной высоты: - HF - Holding Pattern to a Fix - ожидание с отменой над точкой ожидания после одного круга; - RF - Constant Radius to a Fix - полет с заданным радиусом относительно заданной точки. Тип маневра RF характерен для систем RNP-RNAV, в то время как другие типы маневров могут встречаться и в других системах RNAV. 8. Способы подтверждения соответствия технических характеристик (Перевод дан с небольшими комментариями) 8.1. Основные положения Оценка характеристик конкретного оборудования, установленного на борту ВС, и подтверждение их соответствия требованиям настоящего раздела должны производиться, по мере возможности, одновременно с анализом эксплуатационных процедур, разработанных в соответствии с Разделом 10 "Эксплуатационные критерии", принимая во внимание процедуры как при штатных, так и при нештатных ситуациях. 8.1.1. Новое или доработанное оборудование, установленное на ВС При подтверждении соответствия настоящему Материалу следует учитывать следующие специальные положения: 1) эксплуатант представляет в уполномоченный орган доказательную документацию, в которой указывается, каким образом соблюдаются требования настоящего Материала. Документация должна быть основана на Плане, предварительно согласованном с уполномоченным органом. В этом Плане должны быть указаны данные, которые эксплуатант представляет для. сертификации, включая, при необходимости, описание навигационных систем и подтверждение выполнения мероприятий, предписанных нижеследующими пунктами; 2) соответствие техническим требованиям может быть подтверждено непосредственно сертификацией оборудования, анализом безопасности применения системы, подтверждением безопасного уровня соответствующего программного обеспечения, анализом технических характеристик и совокупностью наземных и летных испытаний. В дополнение к заявке на сертификацию предоставляется конструкторская документация в той части, которая подтверждает соблюдение основных положений и критериев Разделов 6 и 7 настоящего Материала: 3) непосредственно эксплуатация системы RNAV и организация индикации в кабине пилотов управляющих сигналов по горизонтальной и вертикальной навигации должны быть оценены на предмет минимизации вероятности ошибок летного экипажа, В частности, при выходе на посадочную прямую должна быть обеспечена возможность одновременно контролировать индикаторы системы RNAV и ILS; 4) сценарии действий при отказах навигационных датчиков и системы RNAV оцениваются на предмет обеспечения возможности перехода на традиционные средства навигации и что при этом не возникнет путаницы с коммутацией индикаторов (например, VOR № 2 на HSI № 1) и, как следствие, ошибочное восприятие информации летным экипажем. Такая оценка должна учитывать также и возможные отказы переключателей и коммутаторов; 5) оцениваются связи системы RNAV с автопилотом и системой директорного режима управления ВС, а также обеспеченность летного экипажа четкой и однозначной индикацией о включении и отключении этих режимов и отказах системы RNAV; 100 6) должно быть продемонстрировано, что возможно выполнение всех видов маневров, предписанных Разделом 7 табл. 1 п. 18 и табл. 2 п. 6 (если реализованы), и, по возможности, без вмешательства летного экипажа, т.е. без необходимости выключать, вручную выставлять заданный путевой угол и повторно включать режим RNAV. 8.1.2. Штатное оборудование (доработка оборудования ВС не потребовалась) Эксплуатант представляет в уполномоченный орган доказательную документацию, в которой указывается, каким образом соблюдаются критерии настоящего Материала при использовании штатного оборудования. Соответствие может быть подтверждено его инспекцией, во время которой проверяется, что требуемые функции и связи действительно работают. Технические характеристики и критерии целостности согласно Раздела 6 могут подтверждаться ссылками на соответствующие записи в РЛЭ ВС или другие применяемые одобрения и дополняющие их сертификационные данные. При отсутствии в эксплуатационной документации соответствующих подтверждений могут потребоваться дополнительные исследования и испытания. В п. 9.3.3 приводится образец дополнения в РЛЭ ВС, которое может потребоваться в таких случаях. 8.2. Целостность (достоверность) базы данных Процедуры обновления базы данных с циклом AIRAC должны соответствовать стандартам EUROCAE ED-76 / RTCA DO-200A (см. п. 10.6). 8.3. Использование оборудования GPS 8.3.1. Использование GPS для выполнения процедур P-RNAV возможно с использованием оборудования, сертифицированного по FAA TSO-C145 и TSO-146, либо JTSO-C129a/ TSO-C129. Оборудование должно быть класса A1, B1, С1, ВЗ или СЗ и быть доработано для выполнения всех требуемых функций, предписанных в разделе 7, табл. 1 настоящего Материала. . 8.3.2. Если имеется только автономное оборудование GPS, соответствующее JTSOC129a/TSO-C129, то для соблюдения критериев P-RNAV и при заполнении заявки согласно п. 8.1.1 (а) необходимо учесть положения JAA TGL № 3, версия 1, п. 5.4. Комментарий. JAA TGL № 3, версия 1, п. 5.4. формулирует требования к автономному оборудованию GPS для выполнения полетов в системе B-RNAV. Согласно TGL № 3 для B-RNAV требовалась автономная GPS класса А1/2 с высотомерной поддержкой работы, связь GPS с индикаторами типа ПНП (CDI, HIS), автоматическая и ручная регулировка их .масштабов, ориентирование этих приборов по ЗПУ, рассчитанному в GPS, дополнительными табло отказов, прерывания RAIM и приближения к WPT, возможность вводить высоту установки на фюзеляже антенны GPS и некоторые другие особенности. Если бы при сертификации по B-RNAV эти критерии жестко отслеживались, то сегодня для P-RNAV потребовались бы незначительные усилия и затраты, как это и было задумано ЕКГА и Евроконтролем еще до введения B-RNA V. 8.3.3.Для повышения непрерывности обслуживания рекомендуется функция FDE. Комментарий. Функция Fault Detection and Exclusion (FDE) требуется для GPS, используемой для океанической навигации согласно FAA Notice 8110.60. Такую функцию из автономных GPS класса А имеют, например, KLN-900, Trimble 2101 I/O и более мощные ПИ СНС. 101 Для сухопутной навигации во всех регионах мира достаточно иметь RAIM, а функция FDЕ только рекомeндуется. 8.4. Использование инерниальных данных Допускается использование инерниальных систем в качестве датчиков определения координат в течение коротких периодов времени, когда автоматическое определение координат по радионавигационным системам невозможно из-за отказов или прерывания радиосигнала. При отсутствии индикации целостности определения координат эксплуатант должен определить, как долго будет обеспечена требуемая точность при переходе навигационной системы в режим работы только по инерциальным данным. Необходимо рассмотреть как полег непосредственно посте взлета, так и маневрирование в районе аэродрома в целой. При этом может потребоваться отнести такую навигацию к процедурам при нештатных ситуациях. Ограничения могут быть обоснованы на модели допустимого дрейфа платформы и должны быть подтверждены полномочным органом в области летной эксплуатации ВС. 8.5. Совместимость оборудования Разные конфигурации навигационных систем с многовариантными органами управления могут создавать проблемы, связанные с различиями как методов работы с оборудованием, так и форматов отображаемой информации. Такие проблемы могут возникать и при путанице с различными версиями программного обеспечения одного и того же оборудования. Что касается захода на посадку - многовариантность (смешивание) оборудования RNAV недопустима. При установке на борту ВС двух и более навигационных систем необходимо, как минимум, учитывать приведенные ниже принципы совместимости, особенно для таких пилотских кабин, архитектура которых позволяет производить перекрестные подключения (например, когда к дисплею № 1 можно подключить GNSS-2). 1. Ввод данных: если на борту установлены две навигационные системы, то методы ввода данных должны быть совместимы, а алгоритмы решения основных задач - похожи. Любые отличия должны быть исследованы на предмет увеличения рабочей нагрузки на летный экипаж. Если ЛЭ допустил процедурную ошибку (например, при вводе данных, полученных от дублирующей системы, в рабочую систему), то это не должно привести к появлению ложной информации, а ошибка должна быть легко обнаружена и устранена. 2. Масштабирование индикаторов боковых отклонений (двух систем) должно быть синхронным либо об изменении масштабов должны выдаваться предупреждения. 3. Символы дисплеев и индикация режимов работы: не должно быть противоречивых символов и табло (например, один и тот же символ в разных системах не должен использоваться с различным смыслом). Отличия в символах и индикации должны быть исследованы на предмет возможности возникновения путаницы. 4. Логика режимов: режимы взаимодействующего (с навигационной системой) оборудования и его связи с другим оборудованием ВС должны быть совместимы. 5. Отказ оборудования: отказ одной из систем не должен приводить к появлению ложной информации. 6. Отображение данных: отображение основных навигационных параметров должно производиться в одних и тех же единицах измерения и с одинаковыми символами. Любое несоответствие в отображении основных навигационных параметрах (двумя системами) не может быть одобрено (сертифицировано). 7. Различия в базах данных: ввиду возможности конфликта двух баз данных любые отличия в них недопустимы. 102 9. Руководство по летной эксплуатации воздушного судна (Перевод текста дан с небольшими сокращениями) 9.1. Новые или дооборудованные ВС: в РЛЭ ВС вносится, как минимум запись о том, что ВС и его оборудование, в том числе доработанное, сертифицировано по стандартам РRNAV либо имеют возможности RNP-1 или лучше. Ограничиться этим можно при условии, что детальное описание установленной системы и соответствующие инструкции и процедуры ее эксплуатации содержатся в других эксплуатационных или учебных руководствах (У эксплуатантов России это РПП эксплуатанта - часть А, глава 8 "Эксплуатационные процедуры" и часть D "Подготовка персонала"). 9.2. Если в других эксплуатационных или учебных руководствах нет соответствующих материалов, то соответствующие изменения и дополнения по выполнению полетов P-RNAV вносятся в следующие разделы РЛЭ ВС или Pilot's Operating Handbook (что применяется): - ограничения: - процедуры нормальной эксплуатации; - процедуры при нештатных ситуациях; - процедуры в аварийных ситуациях; - летно-технические характеристики. 9.3. Для эксплуатируемых ВС со штатными системами RNAV. но в РЛЭ ВС или Pilot's Operating Handbook которых не указаны или указаны не достаточно четко возможности этих систем, эксплуатант вместо изменений и дополнений, издаваемых конструкторскими бюро, может по согласованию с уполномоченным органом воспользоваться одной из следующих альтернатив: 1) в соответствии с п. 8.1.2 представить доказательную документацию и проект Дополнения (в РЛЭ ВС или Pilot's Operating Handbook), разработанные эксплуатантом в соответствии с указаниями п. 9.1 и в типовом формате, приводимом в Приложении Е; или 2) в соответствии с п. 8.1.2 представить доказательную документацию и предполагаемые дополнения в Эксплуатационные спецификации, которые содержат информацию, аналогичную той, которая обычно содержится в РЛЭ ВС. 9.4. Возможности систем, сертифицированных по RNP, превышают требуемые для выполнения полетов по P-RNAV. Такие системы обеспечивают более высокий уровень встроенного контроля целостности навигационной информации и обеспечивают экипажу возможность контролировать расчетную погрешность определения координат, что придает уверенность экипажу в точности работы системы. Поэтому те положения РЛЭ, в которых указано соответствие систем ВС определенным RNP, могут использоваться для подтверждения соответствия систем RNAV требуемым навигационным характеристикам в каком-либо районе полетов. 10.Эксплуатационные критерии (Текст перевода дан с небольшими сокращениями и комментариями) 10.1. Основные положения 10.1.1. На основе критериев и рекомендаций п. 8.1.1 3) ÷ 5) или 8.1.2 (что применимо) эксплуатант должен произвести анализ своих эксплуатационных процедур (РПП часть А, глава 8, а также соответствующие дополнения в РЛЭ ВС) в нормальных и нештатных си103 туациях на предмет их соответствия конкретному типу оборудования, установленному на его ВС. 10.1.2. Приводимые дальше инструкции могут быть использованы эксплуатантом при разработке своих эксплуатационных процедур для конкретных типов оборудования ВС и районов выполнения полетов. Необходимо помнить, что собственно сертификация технических характеристик сама по себе не является основанием для выполнения полетов в воздушном пространстве, по маршрутам и процедурам в районе аэродрома, где требуется разрешение (approval) P-RNAV. Это разрешение должно быть указано в Сертификате эксплуатанта (или выдано и оформлено в соответствии с национальными правилами Государства). 10.2. Процедуры нормальной эксплуатации I 0.2.1. Подготовка к полету 10.2.1.1. При подготовке к полету необходимо убедиться в том, что навигационная инфраструктура на время предполагаемого полета обеспечит выполнение планируемых процедур зональной навигации, а также традиционную (не зональную) навигацию на случай нештатных ситуаций. Необходимо убедиться в исправности бортового оборудования, которое будет использоваться при полете по планируемому маршруту. Навигационная база данных должна соответствовать региону планируемого полета и должна содержать радионавигационные средства, пункты маршрута, процедуры вылета и прибытия в районе аэродрома назначения и запасных. 10.2.1.2. Если уполномоченный орган по использованию воздушного пространства включил в АИП требование о двойном комплекте оборудования P-RNAV для выполнения каких-либо конкретных процедур в районе аэродрома, то необходимо убедиться в исправности обоих комплектов оборудования P-RNAV. Такие условия будут оговариваться, как правило, для процедур, которые предусматривают снижение ниже безопасной высоты пролета препятствий (MSA) или не обеспечены в достаточной степени радиолокационным контролем для поддержки P-RNAV. Будут учитываться также и опасные особенности какой-либо воздушной зоны и возможность выполнения нештатных процедур на случай потери возможности: P-RNAV 10.2.1.3. Если для обеспечения P-RNAV используется автономное оборудование CPS, то необходимо подтвердить обеспечение RAIM с учетом последней информации US Coastguard о состоянии спутников. Примечание. Прогноз RAIM может быть функцией оборудования при условии, что предусмотрена возможность отведения нерабочих спутников из алгоритмов расчета. Если такой функции в оборудовании нет, то можно воспользоваться услугами специальной службы обеспечения пользователей воздушного пространства, уполномоченной выполнять RAIM-прогнозирование. Комментарий. На сайте "ecacnav.com" имеется программа AUGUR, которая позволяет выполнять RAIM-прогнозирование по маршрутам и аэродромам и многое другое в обеспечение требований этого пункта. 10.2.2. Вылет 10.2.2.1. Экипаж должен убедиться, что база данных бортового оборудования действующая и что начальные координаты ВС введены корректно. Активный план полета должен быть проверен на предмет достоверности: - опубликованного SID; - последовательности пунктов маршрута; - соответствия путевых углов и расстояний; - ограничения высот и скоростей и, когда это, возможно, уточняются типы проходимых пунктов - Fly-by или Fly-over. 104 Если оговорено процедурой, необходимо убедиться в том, что определение координат будет производиться но определенному радионавигационному средству (средствам) либо наоборот - какое-либо средство отведено из обработки. Процедура, извлеченная из базы данных, не должна выполняться, если у летного экипажа есть сомнения в ее достоверности. 10.2.2.2. Не допускается включение точек пользователя, записанных вручную (USER), в процедуры SID, активизированные из базы данных, так как это моясет нарушить целостность процедуры Р-RNАV. Летный экипаж должен быть готов к оперативным изменениям маршрута полета, связанным с векторением или командами диспетчера "ПРЯМО-НА", что может потребовать добавления пунктов, извлеченных из базы данных, в активную процедуру SID. 10.2.2.3. Непосредственно перед взлетом летный экипаж должен убедиться в том, что система RNAV включена, работает корректно и, если требуется, проверить правильность ввода данных аэропорта и ВПП взлета. 10.2.2.4. Если система RNAV, работающая в режиме VOR/DME или DME/DME, не производит автоматическое определение координат в месте начала разбега, то перед взлетом пилот должен вручную ввести координаты торца ВПП или фактического места старта. Это требуется для предотвращения недопустимых или неожиданных для летного экипажа смещений координат в системе RNAV после взлета и начала автоматических определений места. Если используется GNSS, то ее инициализация должна быть закончена до начала разбега, а определяемые по GNSS координаты могут использоваться вместо ручного ввода координат ВПП. 10.2.2.5. По возможности выполнение процедуры P-RNAV должно дополнительно контролироваться по традиционным навигационным средствам (VOR/DME). Когда для навигации используются инерциальные системы, летный экипаж должен контролировать интервалы их автоматической коррекции по радиотехническим средствам и следить за тем. чтобы эти интервалы не превышали установленных ограничений (см. п. 8.4). Все вышеуказанное должно быть предписано в эксплуатационных процедурах, выполняемых летным экипажем. 10.2.2.6. Когда ввод начальных координат согласно п. 10.2.2.4 произвести не удалось, вылет должен выполняться с контролем по традиционным навигационным средствам. В этом случае переход на процедуру P-RNAV должен производиться, когда ВС войдет в зону приема сигналов DME/DME и оборудование RNAV войдет в рабочий режим. Примечание. Когда процедурой вылета предусмотрено, что вначале контроль полета производится по традиционным средствам, то на соответствующих картах будет указываться точка, до прохождения которой экипаж должен перейти на процедуру P-RNAV. Если решение о контроле по традиционным средствам на начальном этапе принимает экипаж; то точка такого перехода на картах не указывается. 10.2.3. Подход 10.2.3.1. До начала выполнения маневра подхода летный экипаж должен убедиться в том, что нужная процедура (STAR, IAP) в системе RNAV активизирована. Перед активизацией (возможно, еще до вылета) процедура из базы данных проверяется на соответствие опубликованным процедурам. Проверяются последовательность пунктов маршрута, соответствие путевых углов и расстояний, ограничения высот и скоростей и типы проходимых пунктов - Fly-by или Fly-over. Если оговорено процедурой, необходимо убедиться в том, что какое-либо средство отведено из алгоритмов определения координат. Процедура, извлеченная из базы данных, не должна выполняться, если у экипажа есть сомнения в ее достоверности. 10.2.3.2. Не допускается включение точек пользователя, записанных вручную (USER), в процедуры STAR и IAP, активизированные из базы данных, так как это может нарушить целостность процедуры P-RNAV. 105 10.2.3.3. Если при нештатных ситуациях потребуется перейти на выполнение традиционной процедуры подхода, то летный экипаж заранее должен выполнить необходимые для этого настройки радиосредств. 10.2.3.4. По возможности выполнение процедуры должно дополнительно контролироваться по традиционным навигационным средствам. В частности, при выполнении процедур RNAV, основанных на VOR/DME, положение относительно опорного маяка должно индицироваться и контролироваться летным экипажем. Позывные опорного маяка должны быть прослушаны. Для контроля систем GNSS считается достаточным отсутствие сигнализации о прерывании RAIM. Примечания. 1. Пример одного их методов контроля. Когда средства индикации позволяют, можно сравнивать радиал и дальность до какого-либо маяка VOR/DME по системе RNAV и по радиотехнической системе, настроенной на этот маяк. 2. В некоторых системах точность работы можно оценить по режиму ее работы или по определенному показателю точности (PDOP, HDOP). 10.2.3.5. Летный экипаж должен быть готов к оперативным изменениям маршрута полета, связанных с векторением или командами диспетчера "ПРЯМО - НА", что может потребовать добавления пунктов, извлеченных из базы данных, в активную процедуру. 10.2.3.6. Несмотря на то, что применение вертикальной навигации для P-RNAV не является обязательным, тем не менее, необходимо просмотреть опубликованные составляющие процедуры в отношении высот и скоростей. 10.3. Процедуры при нештатных ситуациях 10.3.1. Процедуры при нештатных ситуациях должны быть разработаны эксплуатантом и должны включать случаи срабатывания сигнализации при следующих отказах: 1) отказы компонентов системы зональной навигации, включая такие отказы, которые влияют на погрешность пилотирования - FTE (например, отказ автопилота или директорного режима); 2) частичные отказы самой системы зональной навигации; 3) отказ навигационных датчиков; 4) превышение времени ограничения работы системы от инерциальных датчиков. 10.3.2. Летный экипаж должен информировать диспетчера ОВД о любых неполадках в работе системы RNAV, которые влекут снижение навигационных возможностей ниже требуемого уровня, и сообщать ему о принятом решении. 10.3.3. При отказе связи летный экипаж должен продолжать выполнение процедуры RNAV и действовать в соответствии с опубликованной процедурой полета без связи. 10.3.4. При потере возможностей P-RNAV летный экипаж должен задействовать процедуры для нештатных ситуаций и перейти на навигацию с использованием альтернативных навигационных средств, к которым может относиться инерциальная система, оборудование VOR/DME и NDB/ 10.4. Донесения об инцидентах О существенных инцидентах, связанных с полетами ВС, которые влияют или могут повлиять на безопасность полетов RNAV. необходимо составлять донесение в соответствии с JAR-OPS 1.420. Такие случаи могут включать: 1) отказы навигационной системы, приводящие к: 106 a) навигационным ошибкам (например, смещениям на картинке дисплея), не связанным с переходом системы из инерциального режима в режим радионавигации; b) серьезным навигационным ошибкам, вызванным ошибками или некорректным кодированием информации в базе данных; c) неожиданным отклонениям от заданной траектории по горизонтали или вертикали, не связанным с действиями летного экипажа; d) существенным искажениям информации без соответствующей сигнализации об отказе; е) полному или частичному отказу навигационного оборудования; 2) неполадки в работе наземных радионавигационных средств, вызывающие серьезные навигационные ошибки, не связанные с переходом бортовой системы из инерциального режима в режим радионавигации. 10.5. Подготовка летного экипажа Летные экипажи должны пройти специальную подготовку и правила и процедуры выполнения процедур RNAV для вылета и прибытия как при нормальной эксплуатации согласно п. 10.2, так и при нештатных ситуациях согласно п. 10.3 настоящего Материала. По возможности в программы профессиональной подготовки и контроля (теоретические и тренажерные) должны включаться зональные процедуры вылета и прибытия. Эксплуатант должен позаботиться о том, чтобы материал по выполнению полетов P-RNAV был включен в Руководство по подготовке (Training Manual). В него, как минимум, должны быть включены следующие темы: Теория зональной навигации, включая особенности B-RNAV, P-RNAV и RNP-RNAV. Ограничения при выполнении полетов RNAV. Особенности карт, баз данных и индикации на дисплеях, включая систему наименований точек пути RNAV. Основные типы маневров и их обозначения, и наиболее детально следующие: - Course to a Fix (CF) - полет на заданную точку с заданным путевым углом; - Track between Two Fixes (TF) - полет no линии, соединяющей две точки. Точки пути Fly-by и Fly-over. Эксплуатация оборудования RNAV, включая: - извлечение процедуры из базы данных; - управление и контроль за работой датчиков; - оперативное изменение активного плана полета; - обеспечение непрерывности работы; - ввод вспомогательных данных (ветер, высота, V ист., Vy, профиль); - маневрирование в соответствии с процедурой; - режим горизонтальной навигации и техника горизонтального маневрирования; - режим вертикальной навигации и техника вертикального маневрирования; - использование директорного режима, автопилота и автомата тяги на различных участках процедуры. Фразеология RNAV Влияние отказов различных систем ВС (например, двигателя или гидравлики) на выполнение полета RNAV 107 10.6. Целостность базы данных 10.6.1. Навигационная база данных должна поступать от полномочного поставщика, который применяет стандарты EUROCAE ED-76/ RTCA DO-200A в отношении производства аэронавигационных данных. 10.6.2. Еще до получения базы данных от полномочного поставщика эксплуатант должен развернуть собственную систему проверки достоверности базы данных с помощью соответствующих программных средств или утвержденных "ручных" способов. Такая проверка должна производиться до наступления срока начала ее действия и, как минимум, охватывать проверку данных тех точек траекторий, где процедурой предусмотрен полет ниже безопасной высоты пролета препятствий. Такая проверка дополняет все предшествующие проверки, выполняемые Службой аэронавигационной информации, поставщиком баз данных и производителем навигационного оборудования. Цель проверки - выявление любых отличий в базе дачных от опубликованных процедур. Контроль целостности баз данных может производиться полномочной сторонней организацией. 10.6.3. О выявленных неточностях в базе данных необходимо сообщать ее поставщику, а выполнение процедур, которых эти неточности касаются, должно быть запрещено соответствующими указаниями эксплуатаита своим экипажам. 10.6.4. Эксплуатант должен учитывать необходимость продолжения собственного контроля даже тех баз данных, которые поступают от полномочного поставщика. 10.6.5. Для помощи в проверке целостности баз данных могут применяться специальные программные средства. Примечание. На сайте ЕКГА/Евроконтроля в разделе "P-RNAV" опубликована информация о том, что не следует "заставлять" эксплуатантов производить собственный контроль баз данных, получаемых от уполномоченных поставщиков, согласно п. 10.6.1 TGL. Предполагается, что часть эксплуатантов все же может получать базы данных и от других неуполномоченных фирм ("non-approved" supplier). В таких случаях входной контроль проводится в обязательном порядке по алгоритму, приводимому на рис. П. 1. 10.7. Эксплуатационная документация 10.7.1. Руководство по летной эксплуатации ВС и контрольные карты должны быть пересмотрены и дополнены с учетом положений, содержащихся в пп. 9.1 - 9.3, а также эксплуатационных процедур п. 10.2 (при нормальной эксплуатации) и п. 10.3 (при нештатных ситуациях). Эксплуатант должен своевременно внести изменения в свое РПП в части выполнения процедур P-RNAV и системы контроля целостности баз данных. Руководства и контрольные карты должны представляться в уполномоченный орган как часть процесса сертификации. 10.7.2. Эксплуатант должен внести свои предложения по изменениям Перечня минимального оборудования (MEL) в части выполнения полетов P-RNAV. 108 ПРИЛОЖЕНИЕ D к TGL10. ВЕРТИКАЛЬНАЯ НАВИГАЦИЯ 1. Настоящий Материал не устанавливает критерии сертификации систем вертикальной навигации, но приводимые ниже положения позволят более полно понять все навигационные функции систем и отношение VNAV к нормативным позициям настоящего документе.. Летный экипаж должен четко представлятв себе возможности режима вертикальной навигации и/или управления вертикальной скоростью, особенно в контексте обеспечения непрерывного профиля снижения. 2. Для решения задач вертикальной навигации система сравнивает вертикальное положение ВС, определяемое как барометрическая высота, с заданным вертикальным профилем, рассчитанным системой RNAV-VNAV по заданным значениям высот, углов наклона траекторий или профилям полета. Отклонение от заданного профиля полета выводится на следующие типы систем и индикаторов, по которым и осуществляется управление ВС в вертикальном плане: - Vertical Profile Deviation Indicator - индикатор отклонений от вертикального профиля; Vertical Profile Display - дисплей вертикального профиля; Automatic Thrust System - автомат тяги; Flight Director - система директорного управления; Automatic pilot - автопилот. 3. Некоторые системы имеют возможность определять оптимальный профиль набора или снижения в зависимости от летно-технических. характеристик ВС (включая характеристики двигателей), веса, скорости, основных метеорологических параметров, принятой эксплуатантом практики в отношении экономичности полетов и опубликованных значений заданных высот и скоростей для конкретной процедуры вылета/прибытия/захода на посадку. 4. Возможность VNAV не является обязательной для P-RNAV. Конфигурация оборудования кабины пилотов и подготовка экипажа должна позволять выдерживать вертикальный профиль полета, управляя самолетом вручную по традиционным средствам. 5. Если процедура VNAV не опубликована или ее выполнять не требуется, право выбирать вертикальный профиль полета между двумя точками с заданными высотами всегда принадлежит пилоту. Однако обязанность летного экипажа - по возможности обеспечивать оптимальный режим вертикального маневра. При этом он должен определить, каким из возможных методов он обеспечит выход на заданный профиль полета. Но когда требуется выполнить опубликованную процедуру VNAV, летный экипаж должен пилотировать ВС в соответствии с ее заданными вертикальными элементами. 6. GNSS используется только как система горизонтальной навигации и ее использование для вертикальной навигации не является предметом рассмотрения в данном Материале. 7. Детальное описание функциональных и технических требований для VNAV и ее отношение к RNP-RNAV можно найти в документах EUROCAE ED-75A / RTCA DO-236A. 110 2. РАСПОРЯЖЕНИЕ МИНТРАНСА РФ ПО ВОПРОСУ P-RNAV О введении в действие Рекомендаций по подготовке воздушных судов и эксплуатантов гражданской авиации России к полетам в системе точной зональной навигации P-RNAV в Европейском регионе по требованиям RNP1 Распоряжение МТ РФ от 04.02.03 № НА-21-р С целью обеспечения выполнения требований самолетовождения в условиях точной зональной навигации и в соответствии с решением Европейской конференции гражданской авиации об обязательном оснащении воздушных судов оборудованием точной зональной навигации P-RNAV для полетов в отдельных аэроузловых зонах в назначенном воздушном пространстве Европы с марта 2003 г., ПРЕДЛАГАЮ: 1. Ввести в действие Рекомендации по подготовке воздушных судов и эксплуатантов граясданской авиации России к полетам в системе точной зональной навигации P-RNAV в Европейском регионе по требованиям R.NP1 (приложение к настоящему распоряжению). 2. Департаменту поддержания летной годности гражданских воздушных судов и технического развития гражданской авиации совместно с ГосНИИ "Аэронавигация" организовать работы по анализу и оценке соответствия навигационных характеристик эксплуатируемых типов и групп воздушных судов с одинаковым составом навигационного оборудования нормативным требованиям по обеспечению полетов в системе точной зональной навигации P-RNAV и подготовке соответствующих заключений. 3. Начальнику Управления государственного надзора за безопасностью полетов, руководителю Департамента летных стандартов оформлять допуск заявленных эксплуатантами воздушных судов к полетам в системе точной зональной навигации P-RNAV в установленном порядке. 4. Рекомендовать руководителям авиапредприятий, авиакомпаний, эксплуатирующих воздушные суда в Европейском регионе, организовать изучение вводимого документа, обеспечить подготовку воздушных судов и их экипажей к полетам, а также получение допуска для полетов в установленном порядке. 5. Контроль за выполнением настоящего распоряжения возложить на руководителя Департамента поддержания летной годности гражданских воздушных судов и технического развития гражданской авиации. Первый заместитель Министра А.В. Нерадько 111 Данное Приложение авторы представили без каких-либо правок по оформлению и содержанию. Приложение к распоряжению Минтранса России от 04 февраля 2003 г. № НА-21-р РЕКОМЕНДАЦИИ по подготовке воздушных судов и эксплуатантов гражданской авиации России к полетам в системе точной зональной навигации P-RNAV в Европейском регионе по требованиям RNP1 ВВЕДЕНИЕ Основной целью данного Руководства является установление порядка по выполнению основных требований по допуску гражданских воздушных судов России к полетам в системе точной зональной навигации P-RNAV в Европейском регионе при действии нормативов RNP1. В Руководстве также приведены требования к функциям, которые должны быть реализованы бортовой системой P-RNAV, требования к эксплуатации этих систем и их аэронавигационному обеспечен ию. Процедуры точной зональной навигации P-RNAV в районе аэродрома являются дальнейшим: развитием концепции применения зональной навигации в Европейском регионе. Их введение является необходимым промежуточным шагом на пути увеличения пропускной способности воздушного пространства и достижения преимуществ, обусловленных гибкостью задаваемых маршрутов движения ВС. Государства - члены Европейской комиссии по вопросам гражданской авиации (ЕКГА) приняли решение об обязательном оснащении воздушных судов оборудованием точной зональной навигации P-RNAV, навигационная точность которого отвечает требованиям RNP1 для полетов в назначенном воздушном пространстве в Европе, планируемого в отдельных аэроузловых зонах с марта 2003 года. Ожидается, что процедуры P-RNAV будут постепенно заменяться на процедуры RNP-RNAV, введение которых ожидается примерно с 2005 года и которые, в отличие от процедур P-RNAV, будут оговаривать все аспекты требуемых навигационных характеристик (RNP) в соответствии с документами ИКАО 9613 и 9650, а не только требований выдерживания заданных линий положения. Концепция требуемых навигационных характеристик RNP - новый, прогрессивный способ формулирования требований к навигационным характеристикам, которым должно удовлетворять воздушное судно в пределах некоторого района воздушного пространства в течение как минимум 95% времени полета. RNP для маршрутных полетов определяется как "уровенв точности навигации, необходимый в рамках заданного воздушного пространства" и предусматривает возможность использования на воздушном судне различных навигационных систем. При этом должны обеспечиваться требуемые характеристики целостности, непрерывности. Требования RNP должны удовлетворяться также при выполнении полетов в системе зональной навигации RNAV, т.е. при выполнении полетов по любой желаемой линии пути в пределах зоны действия радионавигационных средств или в пределах возможностей автономных средств, или совместного использования этих средств. Настоящий документ содержит как функциональные и эксплуатационные требования, соответствующие публикациям Евроконтроля по принципам разработки зональных процедур в районе аэродрома при их использовании для выполнения процедур P-RNAV, так и основные положения и требования в отношении одобрения технических характеристик систем зональной навигации к их использования для выполнения процедур RNP1-RNAV. 112 При этом в настоящем документе разработаны унифицированные процедуры получения одобрения на выполнение полетов в системе P-RNAV. Уточненные функциональные и эксплуатационные требования в процедурах RNP1-RNAV планируется оформить Приложением к данному документу по завершению разработки соответствующих нормативных документов Евроконтролем, ЕКГА и JAA. Разрешение на выполнение полетов в системе P-RNAV (RNP1 -RNAV) .выдается государством эксплуатакта ВС с подтверждением наличия на ВС оборудования, возможности которого соответствуют RNP1, при этом выполняются соответствующие функциональные и эксплуатационные требования P-RNAV (RNP1-RNAV). Разрешение должно выдаваться каждому отдельному эксплуатанту, а также типу воздушных судов с одинаковым составом навигационного оборудования. 1. ОПРЕДЕЛЕНИЯ Зональная навигация RNAV - метод навигации, который позволяет воздушному судну выполнять полет по любой желаемой линии пути в пределах зоны действия радионавигационных средств или в пределах возможностей автономных средств, или совместного использования этих средств. Зональная навигация RNP1 RNAV- навигация с применением основных средств зональной навигации в соответствии с требованием RNP1, т.е. не менее 95% полетного времени ВС должно находиться в пределах ±1.0 м.мили от заданной линии пути (стандарт EUROCONTROL). Оборудование RNAV - комплекс навигационного оборудования, используемого для обеспечения полетов в системе зональной навигации. Точность - степень соответствия расчетного, измеренного или желаемого местоположения в данный момент от его истинного местоположения. Удерживание - группа взаимосвязанных параметров, используемых для определения характеристик RNP RNAV навигационной системы. Этими параметрами являются целостность, непрерывность и регион удерживания. Целостность удерживания - степень достоверности местоположения, выраженного в виде вероятности того, что система определит и оповестит о состоянии, когда обшая погрешность системы (TSE) больше, чем предел бокового удерживания (удвоенная величина RNP). Целостность удерживания определяется максимальной допустимой вероятностью события, при котором TSE больше предела удерживания и это состояние не выявлено. Непрерывность удерживания - способность всей системы соответствовать требованию целостности удерживания без незапланированных перерывов в предполагаемой работе (полной утраты навигационной способности к RNP RNAV; отказе системы, предупреждающей об утрате навигационной способности к RNP RNAV; ложном оповещении об утрате такой навигационной способности при удовлетворительной работе системы). Регион удерживания - регион с центром на желаемой траектории, на который заданы целостность и непрерывность удерживания.В настоящем документе устанавливаются только требования по удерживанию в поперечном плане, которые определяются боковым пределом удерживания. 2. РЕКОМЕНДУЕМЫЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ВОЗДУШНЫМ СУДАМ ДЛЯ ПОЛЕТОВ В СИСТЕМЕ ТОЧНОЙ ЗОНАЛЬНОЙ НАВИГАЦИИ (P-RNAV) В ЕВРОПЕЙСКОМ РЕГИОНЕ ПРИ ДЕЙСТВИИ НОРМАТИВОВ RNP1 2.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ Настоящие технические требования к бортовым системам сформулированы на основании следующих УСЛОВИЙ, принятых полномочными органами в области использования воздушного пространства в целях обеспечения безопасного выполнения процедур P-RNAV в Европейском регионе: 113 При этом все процедуры P-RNAV при действии требований RNP1: • отвечают требованиям соответствующих Документов ИКАО; • построены в соответствии с нормативными положениями Документов Евроконтроля; • все маршруты и процедуры построены в системе координат WGS-84; • не влекут обязательного применения вертикальной (зональной) навигации и подтверждают возможность использования традиционных методов вертикального эшелонирования и на опубликованных схемах содержат фиксированные данные (например, пеленг и дальность до радионавигационного средства), по которым экипаж может контролировать прохождение определенных точек процедуры; • полномочным органом в области использования воздушного пространства исследованы, если требуется -- облетаны, и признаны удовлетворительными как построение самой процедуры, так и навигационная инфраструктура (с учетом необходимости использования дополнительных навигационных средств). При этом демонстрируется способность ВС адекватно и. полностью выполнить данную процедуру. • если процедурой предусмотрена возможность выбора датчиков навигационной информации, например, DME/DME, VOR/DME или GNSS, то обеспечение защиты от препятствий должно учитывать наихудшую точность из выбираемых; • если для выполнения конкретной процедуры для достижения требуемой навигационной характеристики необходимо использовать определенное навигационное средство, - это средство должно быть указано в АИП и на соответствующих публикуемых картах (схемах). Если какое-либо навигационное средство не должно использоваться при выполнении данной процедуры - это также публикуется в АИП и на соответствующих картах (схемах); • если какое-либо навигационное средство (включая космический сегмент GNSS) обозначено в АИП и на соответствующих картах (схемах) как обязательное для выполнения данной процедуры P-RNAV, такое средство контролируется и поддерживается исправным. Если такое средство оказывается нерабочим - выпускается соответствующее извещение (NОТАМ) о невозможности выполнения данной процедуры P-RNAV; • для процедур, основанных исключительно на GNSS. полномочным органом в области использования воздушного пространства определен уровень допустимого риска потери различными ВС возможностей P-RNAV из-за отказов спутников или прерывания RAIM. Аналогичная оценка риска выполняется и для различных процедур P-RNAV, поддерживаемых только одним маяком DME: • в АИП указаны опасные особенности какой-либо воздушной зоны, необходимые нештатные процедуры на случай потери различными ВС возможностей P-RNAV, и если это признано необходимым, требование иметь два комплекта оборудования P-RNAV. Такие условия могут оговариваться для конкретных процедур P-RNAV, которые, например, предусматривают снижение ниже безопасной высоты пролета препятствий или не обеспечены в достаточной степени радиолокационным контролем; • когда процедуры при нештатных ситуациях предусматривают радиолокационную поддержку полета, требование о радиолокационном обслуживании указано в АИП, характеристики радиолокатора продемонстрированы и они соответствуют его назначению; • опубликована фразеология радиообмена, применяемая при ввшолнении процедур РRNAV; • радионавигационные средства, не соответствующие Приложению 10 ИКАО (например, TACAN), исключены из АИП. 2.2. ТРЕБОВАНИЯ К ХАРАКТЕРИСТИКАМ ВОЗДУШНЫХ СУДОВ, ОСНАЩЕННЫХ ОБОРУДОВАНИЕМ ТОЧНОЙ СИСТЕМЫ ЗОНАЛЬНОЙ НАВИГАЦИИ P-RNAV В СООТВЕТСТВИИ С ТРЕБОВАНИЯМИ RNP1 2.2.1. Требования к точности При полетах по маршрутам или в аэродромных зонах, обозначенных как маршруты или зоны: только для ВС, оборудованных системами P-RNAV, точность выдерживания траекто- 114 рии в горизонтальной плоскости в течение 95% полетного времени должна быть не ниже ±1.85 км (±1,0 м. миля). Точность выдерживания линии заданного пути в боковом измерении представляет собой сочетание погрешностей навигационной системы (сумма погрешностей в расчете заданной траектории, погрешности определения координат и погрешности вывода информации на индикацию) и погрешности пилотирования FTE. Это соответствует требованию по точности RNP1. Точность выдерживания в продольном измерении представляет собой сочетание погрешности навигационной системы, погрешности программирования и погрешности системы отображения. Для подтверждения соответствия требованию по точности необходимо продемонстрировать, что суммарная погрешность самолетовождения TSE в каждом измерении не должна превышать норм ±1,85 км (±1,0 м. миля) в течение 95% полетного времени на любом участке одного полета: a) истинное местоположение воздушного судна должно быть в пределах 1,85 км (1,0 м. мили) относительно заданной линии пути маршрута полета; и b) истинное расстояние до точек пути должно быть в пределах 1,85 км (1,0 м. мили) от отображаемого расстояния до точек пути. Под суммарной ошибкой самолетовождения (Total System Error - TSE) для маршрутов RNP подразумевается сумма трех составляющих: TSE = РЕЕ + PDE + FТЕ где РЕЕ - ошибка измерения координат (Position Estimation Error), PDE - ошибки программирования маршрута (Path Definition Error), FTE - ошибка пилотирования (Flight Technical Error). 2.2.2. Целостность В отношении самой бортовой системы: вероятность одновременного появления на индикаторах обоих пилотов опасно ложной навигационной информации или ошибочного положения относительно заданной траектории должна быть маловероятной (1 – 10-7 на час полета) . Вероятность того, что общая ошибка самолетовоясдения (TSE) становится больше предела удерживания (удвоенная величина RNP) без распознавания системой или пользователем, должна быть менее (1 - 10-5 на час полета) (для RNP1 RNAV). 2.2.3. Непрерывность обслуживания В отношении самой бортовой системы должно быть подтверждено, что: - потеря всей навигационной информации должна быть маловероятным событием (1 10-7 на час полета), - невосстанавливаемая потеря всех навигационных функций и связи должна быть практически невероятным: событием (1 - 10 -9 на час полета), - вероятность потери текущей способности к RNPl RNAV или того, что сигнализация об этом ложная, должна быть менее (1 - 10-4 на час полета). 2.2.4. Готовность (прогноз целостности) Готовность представляет собой показатель способности системы обеспечивать надлежащее обслуживание в пределах установленной зоны действия и определяется в виде интервала времени, в течение которого система должна использоваться для навигации, в процессе которой предоставляется достоверная навигационная информация летному экипажу, а также в систему автоматического управления полетом воздушного судна в виде управляющих сигналов. Термин "Готовность" относится только к способности системы отвечать всем требованиям к типу RNP1 до входа в зону действия P-RNAV. 115 3. ТРЕБОВАНИЯ К СОСТАВУ НАВИГАЦИОННЫХ СИСТЕМ 3.1. СИСТЕМЫ ЗОНАЛЬНОЙ НАВИГАЦИИ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ 3.1.1. Для навигации в горизонтальной плоскости бортовое оборудование RNAV должно позволять выполнять предписанные инструкции и выдерживать маршрут из точек пути, хранящихся в бортовой базе данных. 3.1.2. В рамках настоящего документа выполнение полета в системе P-RNAV предусматривает использование такого оборудования RNAV, которое автоматически определяет горизонтальные координаты ВС по следующим навигационным датчикам (без каких-либо приоритетов и последовательности): - дальномерное оборудование, работающее по двум и более наземным маякам (DME/DME); - угломерно-дальномерное оборудование, работающее по совмещенному маяку VOR/DME, если такой маяк определен как удовлетворяющий требованиям для данной процедуры; - глобальная навигационная спутниковая система (GNSS); - инерциальные навигационные системы (INS или IRS) с автоматической коррекцией от подходящей радионавигационной системы, инерциальные навигационные системы (INS) с ограничениями, приведенными в разделе 5.4. Примечание. Система GNSS означает: - бортовое оборудование GPS с барометрической поддержкой работы и функцией RAIM, либо оборудование GPS с бортовой системой функционального дополнения ABAS или спутниковой системой функционального дополнения SBAS (EGNOS); - совмещенное бортовое оборудование ГЛОНАСС/GPS, сертифицированное в соответствии с КТ-34-01. 3.1.3. Вычислитель системы рассчитывает такие навигационные параметры, как ЗПУ и расстояние от текущего места до пункта маршрута (WPT), положение относительно линии заданного пути, выводит на индикацию и в системы управления информацию и сигналы, позволяющие выдерживать заданную траекторию полета. 4.2. РЕКОМЕНДУЕМЫЕ ФУНКЦИИ В табл. 4.2. представлены рекомендуемые функции для выполнения полетов P-RNAV. Таблица 4.2 Рекомендуемые функции 116 5. СПОСОБЫ ПОДТВЕРЖДЕНИЯ СООТВЕТСТВИЯ ТЕХНИ ЧЕСКИХ ХАРАКТЕРИСТИК 5.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ Оценка характеристик конкретного оборудования, установленного на борту ВС, и подтверждение их соответствия требованиям настоящего раздела должна производиться, по мере возможности, одновременно с анализом эксплуатационных процедур, разработанных в соответствии с разделом "Эксплуатационные критерии", принимая во внимание процедуры, как при штатных, так и при нештатных ситуациях. Приводимые ниже инструкции по подтверждению соответствия предполагают, что ВС имеет штатное оборудование для полетов по ППП согласно Федеральным авиационным правилам производства полетов гражданских воздушных судов. 5.1.1. Новое или доработанное оборудование, установленное на ВС При подтверждении соответствия настоящему документу следует соблюдать следующие специальные положения: (a) Заявитель представляет в уполномоченный орган доказательную документацию, в которой указывается, каким образом соблюдаются требования настоящего документа. Документация должна быть разработана в соответствии с Планом, предварительно согласованным с ГосНИИАН и АРМАК. В этом Плане должны быть указаны данные, которые должен представить заявитель для сертификации, включая, при необходимости, описание навигационных систем и подтверждение выполнения мероприятий, предписанных нижеследующими пунктами. (b) Соответствие техническим требованиям может быть подтверждено непосредственно сертификацией оборудования, анализом безопасности применения системы, подтверждением безопасного уровня соответствующего программного обеспечения (согласно п. 2.2), анализом технических характеристик и совокупностью наземных и летных испытаний. В дополнение к заявке на сертификацию предоставляется конструкторская документация в той части, которая подтверждает соблюдение основных положений и критериев разделов 2 и 4 настоящего документа. (c) Непосредственно эксплуатация системы RNAV и организация индикации в кабине пилотов управляющих сигналов по горизонтальной и вертикальной навигации должны быть с ценены на предмет минимизации вероятности ошибок экипажа. В частности, при выходе на 117 посадочную прямую должна быть обеспечена возможность одновременно контролировать индикаторы системы RNAV и ILS. (d) Сценарии действий при отказах навигационных датчиков и системы RNAV оцениваются на предмет обеспечения возможности перехода на традиционные средства навигации и что при этом не возникнет путаницы с коммутацией индикаторов (например, VOR № 2 на HSI № 1) и, как следствие, ошибочное восприятие информации экипажем. Такая оценка должна учитывать также и возможные отказы переключателей и коммутаторов. (г) Оцениваются связи системы RNAV с автопилотом и системой директорного режима управления ВС а также обеспеченность экипажа четкой и однозначной индикацией о включении и отключении этих режимов и отказах системы RNAV. (f) Должно быть продемонстрировано, что возможно выполнение всех видов маневров, предписанных разделом 4 табл. 1 п. 18 и табл.2 п.6 (если реализованы), без вмешательства экипажа, т.е. без необходимости выключать, вручную выставлять заданный путевой угол и повторно включать режим RNAV. При этом не должна ограничиваться возможность вмешательства экипажа в работу системы при необходимости. 5.1.2. Штатное оборудование Заявитель представляет в уполномоченный орган доказательную документацию, в которой указывается, каким образом соблюдаются критерии настоящего документа при использовании штатного оборудования. Соответствие может быть подтверждено его инспекцией, во время которой проверяется, что требуемые функции и связи действительно работают. Согласно раздела 2, технические характеристики и критерии целостности могут подтверждаться ссылками на соответствующие записи в РЛЭ ВС или другие применяемые одобрения и дополняющие их сертификационные данные. При отсутствии в эксплуатационной документации соответствующих подтверждений требуется проведение дополнительных исследований и летных испытаний. 5.2. ЦЕЛОСТНОСТЬ (ДОСТОВЕРНОСТЬ) БАЗЫ ДАННЫХ База дачных, в том числе порядок ее обновления, должна быть одобрена уполномоченным органом на основе требований, указанных в EUROCAE ED-76/RTCA DO-200A. 5.3. ИСПОЛЬЗОВАНИЕ ОБОРУДОВАНИЯ GNSS 5.3.1. Использование оборудования GNSS для выполнения процедур P-RNAV возможно, если оно сертифицировано авиационными властями страны разработчика по TSO-C145 и TSO-146, либо JTSO-C129a/ TSO-C129 ( ) или сертифицировано АР МАК по КТ-34-01. Оборудование должно быть класса A1, В1, C1, ВЗ или СЗ и быть доработано для выполнения всех требуемых функций, предписанных в разделе 4, табл. 4.1 настоящего документа. Функция RAIM или ее эквивалент в мультисенсорных системах также должны быть обеспечены. 5.3.2. Автономное оборудование GNSS для соблюдения критериев P-RNAV при заполнении заявки согласно п. 5.1.1 (а) должно отвечать следующим требованиям: а) должно быть сертифицировано по TSO-129a или по TSO-129 и дополнительно по п. п. (а).(З), (xv).( 5 ) и (а).(6) из TSO-129a, или по требованиям АР МАК КТ-34-01; б) при наличии других навигационных систем, кроме автономного оборудования GNSS, должно быть предусмотрено: - наличие селектора навигационных систем; - наличие признака выбранной навигационной системы; - индикация режима выбранной навигационной системы; - выдача управляющих сигналов от выбранной навигационной системы в директорный прибор или автопилот; в) потеря навигационной функции должна индицироваться экипажу; г) отказ данных о введенной в оборудование GNSS высоте должен индицироваться оборудованием GNSS; 118 д) ввод установочных данных в оборудование GNSS (тип эллипсоида, порт ввода/вывода, значения высоты антенны, выбор калибровки внешнего индикатора CDI) не должен выполняться пилотом. Эти данные должны быть приведены в соответствующем руководстве; е) средства контроля и индикации, эксплуатационные процедуры и возможность самолетовождения по данным GNSS должны быть оценены экипажем в ОУЭ. 5.4. ИСПОЛЬЗОВАНИЕ ИНЕРЦИАЛЬНЫХ СИСТЕМ Допускается использование инерциальных систем в качестве датчиков определения координат в течение обоснованных периодов времени, когда автоматическое определение координат по радионавигационным системам невозможно из-за отказов или прерывания радиосигнала. При отсутствии индикации целостности определения координат заявитель должен определить, как долго будет обеспечена требуемая точность при переходе навигационной системы в режим работы только по инерциальным данным. Необходимо рассмотреть как полет непосредственно после взлета, так и маневрирование в районе аэродрома в целом. При этом: может потребоваться отнести такую навигацию к процедурам при нештатных ситуациях. Ограничения могут быть обоснованы на модели допустимого дрейфа платформы. 5.5. СОВМЕСТИМОСТЬ ОБОРУДОВАНИЯ Разные конфигурации навигационных систем с многовариантными органами управления могут создавать проблемы, связанные с различиями как методов работы с оборудованием, так и форматов отображаемой информации. Такие проблемы могут возникать и при путанице с различными версиями программного обеспечения одного и того же оборудования. Что касается захода на посадку - многовариантность (смешивание) оборудования P-RNAV недопустима. При установке на борту ВС двух и более навигационных систем необходимо, как минимум, учитывать приведенные ниже принципы совместимости, особенно для таких пилотских кабин, архитектура которых позволяет производить перекрестные подключения (например, когда к дисплею № 1 можно подключить GNSS-2). (a) Ввод данных: если на борту установлены две навигационные системы, то методы ввода данных должны быть совместимы, а алгоритмы решения основных задач - похожи. Любые отличия должны быть исследованы на предмет увеличения рабочей нагрузки на экипаж. Если экипаж допустил процедурную ошибку (например, при вводе данных, полученных от дублирующей системы, в рабочую систему), то это не должно привести к появлению ложной информации, а ошибка должна быть легко обнаружена и устранена. (b) Масштабирование индикаторов боковых отклонений (двух систем) должно быть синхронным либо об изменении масштабов должны выдаваться предупреждения. (c) Символы дисплеев и индикация режимов работы: не должно быть противоречивых символов и табло (например, один и тот же символ в разных системах не должен использоваться с различным смыслом). Отличия в символах и индикации должны быть исследованы на предмет возможности возникновения путаницы. (d) Логика режимов: режимы взаимодействующего (с навигационной системой) оборудования и его связи с другим оборудованием ВС должны быть совместимы. (e) Отказ оборудования: отказ одной из систем не должен приводить к появлению ложной информации. (f) Отображение данных: отображение основных навигационных параметров должно производиться в одних и тех же единицах измерения и с одинаковыми символами. Любое несоответствие в отображении основных навигационных параметров (двумя системами) не может быть одобрено (сертифицировано). (g) Различия в базах данных: ввиду возможности конфликта двух баз данных любые отличия в них недопустимы. 119 6. РЛЭ ВС 6.1. Новые или дооборудованные ВС: РЛЭ ВС должно, как минимум, содержать приводимую ниже информацию. Ограничиться этим можно при условии, что детальное описание установленной системы и соответствующие инструкции и процедуры ее эксплуатации содержатся в других эксплуатационных или учебных руководствах. (а) Запись о том, что ВС и его оборудование, в том числе доработанное, сертифицировано по стандартам P-RNAV в соответствии с требованиями RNP1, либо имеют возможности лучше RNP1. 6.2. Если в других эксплуатационных руководствах нет соответствующих материалов, то соответствующие изменения и дополнения по выполнению полетов P-RNAV вносятся в следующие разделы РЛЭ ВС: Ограничения; Процедуры нормальной эксплуатации; Процедуры при нештатных ситуациях; Процедуры в аварийных ситуациях; Летно-технические характеристики. 6.3. Для эксплуатируемых BС со штатными системами RNAV, но в РЛЭ ВС или Pilots Operating Handbook которых не указаны или указаны не достаточно четко возможности этих систем, заявитель, вместо изменений и дополнений, издаваемых конструкторскими бюро, может по согласованию с уполномоченным органом воспользоваться одной из следующих альтернатив: (a) В соответствии с п. 5.1.2 представить доказательную документацию и проект Дополнения в РЛЭ ВС, разработанный заявителем в соответствии с указаниями п. 6.1 и в типовом формате. (b) В соответствии с п. 5.1.2 представить доказательную документацию и предполагаемые дополнения в Эксплуатационные Спецификации, которые содержат информацию, аналогичную той, которая обычно содержится в РЛЭ ВС. 6.4. Возможности систем, сертифицированных по P-RNAV, превышают требуемые для выполнения полетов RNAV. Такие системы обеспечивают более высокий уровень встроенного контроля целостности навигационной информации и обеспечивают экипажу возможность контролировать расчетную погрешность определения координат, что придает уверенность экипажу в точности работы системы. Поэтому те положения РЛЭ, в которых указано соответствие систем ВС определенным RNP, могут использоваться для подтверждения соответствия систем RNAV требуемым навигационным характеристикам в каком-либо районе полетов. 7. ЭКСПЛУАТАЦИОННЫЕ КРИТЕРИИ 7.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ 7.1.1. На основе критериев и рекомендаций п. 5.1.1 (c)-f) или 5.1.2 (что применимо) заявитель должен произвести анализ своих эксплуатационных процедур в нормальных и нештатных ситуациях на предмет их соответствия конкретному типу оборудования, установленному на заявляемом ВС. 7.1.2. Приводимые ниже инструкции могут быть использованы заявителем при разработке своих эксплуатационных процедур для конкретных типов оборудования ВС и районов выполнения полетов. Сертификация технических характеристик сама по себе не является основанием для выполнения полетов в воздушном пространстве, по маршрутам и процедурам в районе аэродрома, где требуется разрешение P-RNAV в соответствии с требованиями RNP1. Это разрешение должно быть указано в Сертификате эксплуатанта (или выдано и оформлено в установленном порядке в соответствии с АП-21). 120 7.2. ПРОЦЕДУРЫ НОРМАЛЬНОЙ ЭКСПЛУАТАЦИИ 7.2.1. Подготовка к полету 7.2.1.1. При подготовке к полету необходимо убедиться в том, что навигационная инфраструктура на время предполагаемого полета обеспечит выполнение планируемых процедур зональной навигации, а также традиционную (незональную) навигацию на случай нештатных ситуаций. Необходимо убедиться в исправности бортового оборудования, которое будет использоваться при полете по планируемому маршруту. Навигационная база данных должна соответствовать региону планируемого полета и должна содержать радионавигационные средства, пункты маршрута, процедуры вылета и прибытия в районе аэродрома назначения и запасных. 7.2.1.2. Если уполномоченный орган по использованию воздушного пространства включил в АИП требование о двойном комплекте оборудования P-RNAV для выполнения каких-либо конкретных процедур в районе аэродрома, то необходимо убедиться в исправности обоих комплектов этого оборудования. Такие условия будут оговариваться как правило для процедур, которые предусматривают снижение ниже безопасной высоты пролета препятствий или не обеспечены в достаточной степени радиолокационным контролем для поддержки P-RNAV. Будут учитываться также и опасные особенности какой-либо воздушной зоны, и возможность выполнения нештатных процедур на случай потери возможности РRXAV. 7.2.1.3. Если для обеспечения P-RNAV используется автономное оборудование GPS, то необходимо подтвердить обеспечение RAIM с учетом последней информации US Coastguard о состоянии спутников. Примечание. Прогноз RAIM может быть функцией оборудования при условии, что предусмотрена возможность отведения нерабочих спутников из алгоритмов расчета. Если такой функции в оборудовании нет, то можно воспользоваться услугами специальной службы обеспечения пользователей воздушного простракства, уполномоченной выполнять RAIM-прогнозирование. 7.2.2. Вылет 7.2.2.1. Экипаж должен убедиться, что база данных бортового оборудования - действующая и что начальные координаты ВС введены корректно. Активный план полета должен быть проверен сравнением картографического дисплея (если есть) или MCDU с соответствующими картами, схемами SID или другими используемыми документами аэронавигационной информации. Проверяются последовательность пунктов маршрута, соответствие путевых углов и расстояний, ограничения высот и скоростей и, когда это возможно, уточняются типы проходимых пунктов - Fly-By или Fly-Over. Если оговорено процедурой, необходимо убедиться в том, что определение координат будет производиться по определенному радионавигационному средству (средствам) либо наоборот - какое-либо средство отведено из обработки. Процедура, извлеченная из базы данных, не должна выполняться, если у экипажа есть сомнения в ее достоверности. Предполетный контроль должен, как минимум, состоять из просмотра процедуры по картографическому дисплею, на который выводится вся описанная в данном пункте информация. 7.2.2.2. Не допускается ручное создание экипажем новых пунктов в системе RNAV, так как это может нарушить целостность задействованной процедуры P-RNAV. Экипаж должен быть готов к оперативным изменениям маршрута полета, связанных с векторением или командами диспетчера "ПРЯМО-НА", что может потребовать добавления пунктов из базы данных в активную процедуру. 7.2.2.3. Непосредственно перед взлетом экипаж должен убедиться в том, что система RNAV включена, работает корректно и, если требуется, проверить правильность ввода данных аэропорта и ВПП взлета. 7.2.2.4. Если система не производит автоматическое определение координат в месте начала разбега, то перед взлетом экипаж должен вручную ввести координаты торца ВПП или 121 фактического места старта. Это требуется для предотвращения недопустимых или неожиданных для -экипажа смещений координат в системе RNAV после взлета и начала автоматических определений места. Если используется GNSS, то ее инициализация должна быть закончена до начала разбега, а определяемые по GNSS координаты могут использоваться вместо ручного ввода координат ВПП. 7.2.2.5. По возможности выполнение процедуры должно контролироваться по традиционным навигационным средствам. Когда для навигации используются инерциальные системы, экипаж должен контролировать интервалы их автоматической коррекции по радиотехническим средствам и следить за тем, чтобы эти интервалы не превышали установленных ограничений (см. п. 5.4). Все вышеуказанное должно быть предписано в эксплуатационных процедурах,.выполняемых летным экипажем. 7.2.2.6. Когда ввод начальных координат согласно п. 7.2.2.4 произвести не удалось, вылет должен выполняться с контролем по традиционным навигационным средствам. Переход на процедуру P-RNAV должен производиться тогда, когда ВС войдет в зону приема сигналов DME/DME и оборудование RNAV войдет в рабочий режим. Когда процедурой вылета предусмотрено, что в начале контроль полета производится по традиционным средствам, то на соответствующих картах будет указываться точка, до прохождения которой экипаж должен перейти на процедуру P-RNAV. Если решение о контроле но традиционным средствам на начальном этапе принимает экипаж, то точка такого перехода на картах не указывается. 7.2.3. Подход 7.2.3.1. Еще до начала выполнения маневра подхода экипаж должен убедиться в том, что нужная процедура загружена (в систему RNAV). Активный план полета должен быть проверен сравнением картографического дисплея (если есть) или MCDU с соответствующими картами. Проверяются последовательность пунктов маршрута, соответствие путевых углов и расстояний, ограничения высот и скоростей и, когда это возможно, уточняются типы проходимых пунктов - Fly-by или Fly-over. Если оговорено процедурой, необходимо убедиться в том, что какое-либо средство отведено из алгоритмов определения координат. Процедура, извлеченная из базы данных, не должна выполняться, если у экипажа есть сомнения в ее достоверности. Предполетный контроль должен, как минимум, состоять из просмотра процедуры по картографическому дисплею, на который выводится вся описанная в данном пункте информация. 7.2.3.2. Не допускается ручное создание экипажем новых пунктов в системе RNAV, так как это может нарушить целостность задействованной процедуры P-RNAV. 7.2.3.3. Если при нештатных ситуациях потребуется перейти на выполнение традиционной процедуры подхода, то экипаж заранее должен выполнить необходимые для этого операции. 7.2.3.4. По возможности выполнение процедуры должно контролироваться по традиционным навигационным средствам. В частности, при выполнении процедур RNAV, основанных на VOR/DME, положение относительно опорного маяка должно индицироваться и контролироваться экипажем. Для системы RNAV, не использующей в качестве датчика GNSS, в процессе снижения и до прохождения точки начала захода на посадку необходимо каким-либо приемлемым способом проконтролировать ее работу. Для контроля систем GNSS считается достаточным отсутствие сигнализации о прерывании RAIM. При отрицательных результатах контроля системы должна выполняться традиционная процедура подхода. Примечания: (1) Пример одного их методов контроля: когда средства индикации позволяют сравнивать радиал и дальность до какого-либо маяка VOR/DME по системе RNAV и по радиотехнической системе, настроенной на этот маяк. (2) В некоторых системах точность работы можно определить но режиму ее работы или по определенному показателю точности. 122 (3) Когда на MCDU выводятся только круглые значения расчетной ошибки, не позволяющие определить ее допустимость для процедуры P-RNAV, необходимо применять другие подходящие способы контроля точности системы. 7.2.3.5. Экипаж должен быть готов к оперативным изменениям маршрута полета, связанных с векторением или командами диспетчера "ПРЯМО-НА". Это может потребовать добавления пунктов из базы данных в активную процедуру. Но при этом не допускается редактирование активной процедуры с использованием оперативных пунктов и точек, не содержащихся в базе данных. 7.2.3.6. Необходимо просмотреть опубликованные составляющие процедуры в отношении высот и скоростей, поскольку применение вертикальной навигации не является обязательным. 7.3. ПРОЦЕДУРЫ ПРИ НЕШТАТНЫХ СИТУАЦИЯХ 7.3.1. Процедуры при нештатных ситуациях должны быть разработаны заявителем и должны включать случаи срабатывания сигнализации о следующих отказах: (a) Отказы компонентов системы зональной навигации, включая такие отказы, которые влияют на погрешность пилотирования – FTE (например, отказ автопилота или директорного режима). (b) Частичные отказы самой системы зональной навигации. (c) Отказ навигационных датчиков. (d) Превышение времени ограничения работы системы от инерциальных датчиков. 7.3.2. Экипаж должен информировать диспетчера ОВД о любых неполадках в работе системы RNAV, которые влекут снижение навигационных возможностей ниже требуемого уровня, и сообщать ему о принятом решении. 7.3.3. При отказе связи экипаж должен продолжать выполнение процедуры RNAV и действовать в соответствии с опубликованной процедурой полета без связи. 7.3.4. При потере возможностей P-RNAV экипаж должен задействовать процедуры при нештатных ситуациях и перейти на навигацию с использованием альтернативных навигационных средств, к которым: может относиться и инерциальная система. Альтернативные навигационные средства не обязательно должны быть системами RNAV. 7.4. ДОНЕСЕНИЯ ОБ ИНЦИДЕНТАХ О существенных инцидентах, связанных с полетами ВС, которые влияют или могут повлиять на безопасность полетов RNAV, необходимо составлять донесение в соответствии с JAR-OSP 1.420. Такие случаи могут включать: 7.4.1. Такие отказы навигационной системы при выполнении полета P-RNAV, которые приводят к: а) навигационным ошибкам (например, смещениям на картинке дисплея), не связанным с переходом системы из инерциального режима в режим радионавигации; 5) серьезным навигационным ошибкам, вызванным ошибками или некорректным кодированием информации в базе данных; в) неожиданным отклонениям от заданной траектории по горизонтали или вертикали, не связанными с действиями экипажа; г) существенным искажениям информации без соответствующей сигнализации об отказе; д) полному или частичном отказу навигационного оборудования. 7.4.2. Неполадки в работе наземных радионавигационных средств, вызывающие серьезные навигационные ошибки, не связанные с переходом бортовой системы из инерциального режима в режим радионавигации. 123 7.5. ПОДГОТОВКА ЛЕТНОГО ЭКИПАЖА Летные экипажи должны пройти специальную подготовку и получить инструкции и указания по выполнению процедур RNAV для вылета и прибытия как при нормальной эксплуатации согласно п. 7.2, так и при нештатных ситуациях согласно п. 7.3 настоящего документа. Программы профессиональной подготовки и контроля (теоретические и тренажерные) должны быть согласованы с ГосНИИ АН. Заявитель должен позаботиться с том, чтобы материал по выполнению полетов РRNAV в соответствии с требованиями RNP1 был включен в Руководство по производству полетов. 7.6. ЦЕЛОСТНОСТЬ БАЗЫ ДАННЫХ 7.6.1. Навигационная база данных должна поступать от полномочного поставщика, который, применяет стандарты EUROCAE ED-76/ RTCA DO-200A в отношении производства аэронавигационных данных. 7.6.2. Еще до получения базы данных от полномочного поставщика эксплуатант должен развернуть собственную систему проверки достоверности базы данных с помощью соответствующих программных средств или утвержденных "ручных" способов. Такая проверка должна производиться до наступления срока начала ее действия и, как минимум, охватывать проверку данных в тех точках траекторий, где процедурой предусмотрен полет ниже безопасной высоты пролета препятствий. Такая проверка дополняет все предшествующие проверки, выполняемые Службой Аэронавигационной Информации, поставщиком баз данных и производителем навигационного оборудования. Цель проверки - выявление любых отличий в базе данных от опубликованных процедур. Контроль целостности баз данных может производиться полномочной сторонней организацией. 7.6.3. О выявленных неточностях в базе данных необходимо сообщать ее поставщику, а выполнение процедур, которых эти неточности касаются, должно быть запрещено соответствующими указаниями заявителя своим экипажам. 7.6.4. Заявитель должен учитывать необходимость продолжения собственного контроля даже тех баз данных, которые поступают от полномочного поставщика. 7.7. ЭКСПЛУАТАЦИОННАЯ ДОКУМЕНТАЦИЯ 7.7.1. РЛЭ ВС и контрольные карты должны быть пересмотрены и дополнены с учетом положений, содержащихся в п.п. 5.1, 5.2 и 5.3, а также эксплуатационных процедур п. 6.2 (при нормальной эксплуатации) и п. 6.3 (при нештатных ситуациях). Заявитель должен своевременно внести изменения в свое РПП в части выполнения процедур P-RNAV и системы контроля целостности баз данных. Руководства и контрольные карты должны представляться в уполномоченный орган как часть процесса сертификации. 7.7.2. Заявитель должен внести свои предложения по изменениям Перечня Минимального Оборудования в части выполнения полетов P-RNAV. 8. ПРОЦЕДУРЫ ПОЛУЧЕНИЯ ОДОБРЕНИЯ 8.1. ОДОБРЕНИЕ ТИПА (ГРУППЫ) ВС 8.1.1. Для сертификации ВС, подлежащих сертификации в АР МАК, процедура изложена в АП-21. 8.1.2. Для ВС, аттестованных авиационными властями стран - участников Минского соглашения, процедуры сертификации типа (группы) ВС следующие: 124 - разработчик ВС (Заявитель) подает заявку в ГС ГА Минтранса России на получение соответствия типа (группы) ВС требованиям для полетов в системе точной зональной навигации P-RNAV з Европейском регионе в соответствии с требованиями RNP1. - к заявке прилагается спецификация, которая должна содержать состав систем зональной навигации (СЗН) в горизонтальной плоскости, установленных на ВС, схем связей СЗН, ожидаемые условия эксплуатации к ограничения, в диапазоне которых будет сертифицирован тип (группа) ВС, доказательная документация, подтверждающая соответствие технических характеристик ВС требованиям для выполнения полетов в системе P-RNAV в Европейском регионе (требованиям к точности, целостности, непрерывности обслуживания, обязательным и рекомендуемым функциональным требованиям), эксплуатационная документация, содержащая рекомендации для обеспечения полетов в условиях P--RNAV. Работы по оценке соответствия заявленных типов (групп) ВС проводит ГосНИИ "Аэронавигация". По результатам работ оформляется Заключение, служащее основанием для одобрения типа (группы) ВС ГС ГА Минтранса России. 8.1.3. Для иностранных ВС, сертифицированных АР МАК, допуск типа (группы) осуществляется следующим образом: - АР МАК получает от эксплуатанта ВС (изготовителя) доказательную документацию, подтверждающую выполнение требований для обеспечения полетов в условиях Р- RNAV, бюллетени по доработкам ВС и эксплуатационную документацию, отражающую требования по поддержанию летной годности при полетах в условиях Р- RNAV; - специалисты АР МАК совместно с экспертами ГосНИИ "Аэронавигация" рассматривают вышеуказанную документацию и оформляют Заключение; - АР МАК на основании Заключения принимает решение о допуске к полетам. 8.1.4. Разработчик ВС выпускает эксплуатационный бюллетень (служебную записку) по обеспечению соответствия находящихся в эксплуатации ВС требованиям для полетов в условиях P-RNAV. 8.2. ОДОБРЕНИЕ ЭКЗЕМПЛЯРА ВС И ПОРЯДОК ПОЛУЧЕНИЯ ДОПУСКА К ПОЛЕТАМ 8.2.1. Эксплуатанты, планирующие полеты в условиях P-RNAV: - определяют ВС, предполагаемые к эксплуатации в системе P-RNAV в Европейском регионе; - обращаются в ГС ГА за информацией о типовой сертификации ВС, заявляемых для полетов в условиях P-RNAV; - если имеется одобрение типа (группы), то проводят работы по обеспечению соответствия ВС эксплуатанта нормативным требованиям: (в соответствии с эксплуатационными бюллетенями или служебными записками, введенными в действие ГС ГА), - если одобрение типа (группы) отсутствует, то ГосНИИ "Аэронавигация"по поручению ГС ГА (подготовка доказательной документации, разработка КД и ЭД, дооборудование ВС, проведение необходимых испытаний и др.) оформляет Заключение, служащее основанием для одобрения типа (группы) ВС ГС ГА; - направляют в Отдел сертификации эксплуатантов воздушного транспорта (УСЭ и АОН) ГС ГА в установленном порядке заявку на получение дополнения к Свидетельству эксплуатанта для выполнения полетов в Европейском регионе в условиях P-NAV. К заявке прилагаются: а) в соответствии с бюллетенем (служебной запиской), введенным в действие ГС ГА. Технический Акт о выполнении доработок ВС или Заключение; б) Дополнения к Руководству по производству полетов и Руководствам по летной и технической эксплуатации ВС в части обеспечения полетов в условиях P-RNAV; в) Сведения о прохождении обучения летным или инженерно-техническим составом. 125 8.2.2. ГосНИИ "Аэронавигация" проводит оценку соответствия Эксплуатантов требованиям по обеспечению полетов в условиях P-RNAV в Европейском регионе, для чего: - разрабатывает методики оценки соответствия ВС требованиям P-RNAV и рекомендации по обеспечению соответствия ВС нормативным требованиям; - проводит оценку готовности эксплуатанта и оценку ВС нормативным требованиям; - выдает Заключение по соответствию типа (группы) ВС нормативным требованиям для полетов в условиях P-RNAV (для ВС, не имеющих Сертификата АРМАК). 8.2.3. ГС ГA Минтранса России утверждает: а) нормативные требования по обеспечению полетов в системе точной зональной навигации P-RNAV в Европейском регионе; б) Заключения ГосНИИ "Аэронавигация" по соответствию типа (группы) ВС нормативным требованиям по обеспечению полетов в условиях P-RNAV (одобрение типа (группы) ВС, не имеющих Сертификата АРМАК); з) выдает допуск заявленным экземплярам ВС к полетам. 3.3. ПОЛУЧЕНИЕ РАЗРЕШЕНИЯ НА ПРОИЗВОДСТВО ПОЛЕТОВ ГС ГА: - выдает разрешение на производство полетов в условиях P-RNAV; - оформляет Эксплуатанту дополнение к Свидетельству эксплуатанта; - регистрирует ВС, получившие допуск к полетам в условиях P-RNAV; - осуществляет инспекторский контроль (с привлечением специалистов ГосНИИ "Аэронавигация" за поддержанием летной годности ВС в части соответствия требованиям по обеспечению полетов в условиях Р- RNAV. 126