mnogokriterialnaya-model-otsenki-i-vybora-avtomaticheski-upravlyaemyh-transportnyh-sredstv-agv-dlya-skladov
реклама

ЛОГИСТИКА
УДК 658.286.2-52:658.78
https://doi.org/10.18503/2222-9396-2019-9-1-4-20
МНОГОКРИТЕРИАЛЬНАЯ МОДЕЛЬ ОЦЕНКИ И ВЫБОРА
АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫХ ТРАНСПОРТНЫХ
СРЕДСТВ (AGV) ДЛЯ СКЛАДОВ
Стойчич Мирко1, Стевич Желько1, Николич Андрей1, Божичкович Здравко1
1
Восточно-Сараевский университет, Факультет транспорта и организации перевозок, г. Добой, Босния и Герцеговина
Аннотация
Для повышения эффективности транспортировки и складирования грузов в настоящее время используется комплекс
транспортных и погрузочно-разгрузочных средств и устройств. Ключевую роль в автоматизации складов играет особый вид
транспортных средств – автоматически управляемые транспортные средства (AGV – Automatic Guided Vehicles). Основными
преимуществами использования AGV являются: снижение затрат на оплату труда складских рабочих; повышение надёжности, безопасности и производительности погрузочно-разгрузочных и транспортно-складских работ; повышение сохранности
грузов; возможность автоматизации управления работой всего транспортно-складского комплекса. Решать задачу выбора модели AGV авторами предлагается с использованием разработанной и представленной в статье гибридной FUCOM-EDAS модели. Методом FUCOM (Full Consistency Method – метод полной согласованности) производится расчёт значений весовых
коэффициентов альтернатив, а методом EDAS (The Evaluation based on Distance from Average Solution – оценка отклонения от
среднего решения) – выбор наилучшей альтернативы. Представлен пример выбора AGV из девяти моделей по семи критериям. Оценка чувствительности полученных результатов и разработанной модели производилась методами WASPAS
(Weighted Aggregated Sum Product Assessment – метод совокупной взвешенной суммы), SAW (Simple Additive Weighting –
метод простого аддитивного взвешивания), MABAC (Multi-Attributive Border Approximation Area Comparison – метод сравнения многокритериальных разграниченных областей) и ARAS (Additive Ratio Assessment – метод оценки аддитивного отношения). Для двух из рассмотренных альтернатив были получены одинаковые результаты для всех четырёх методов оценки
устойчивости. Показана методики выбора приоритетной альтернативы (альтернатива A5 в представленном примере).
Ключевые слова: автоматически-управляемые транспортные средства, AGV, FUCOM, EDAS, транспортные и погрузочноразгрузочные средства, WASPAS, SAW, MABAC, ARAS.
1. Введение*
Активное развитие логистики в настоящее время
связано с широким распространением информационно-коммуникационных технологий, в частности, для
автоматической идентификации грузов, отслеживания
транспортных средств с использованием навигационных система, автоматического управления транспортными средствами и т.д. Одной из областей, в которых
ярко проявляются эти тенденции, является транспортно-складская система. Современные технологии
позволяют полностью автоматизировать работу складов, включая процессы получения, отправки, размещения, внутренней транспортировки, упаковки, грузов.
Для выполнения погрузочно-разгрузочных и
транспортно-складских работ используется широкий
комплекс средств и устройств. Укрупнённо этот комплекс подразделяется на четыре категории: устройства
для хранения грузов (полки, стеллажи, штабели); автоматизированные системы (системы размещения и поиска грузов, конвейеры, роботизированные системы
перемещения грузов, автоматически управляемые
транспортные средства); погрузчики; оборудование
для навалочных грузов (бункеры, элеваторы, конвейеры) [1].
Основными целями применения новых технологий
на складах является экономия затрат трудовых и материальных ресурсов, что способствует снижению цены
конечного продукта [2]. Выбор оборудования для выполнения погрузочно-разгрузочных работ является
сложной задачей, поскольку необходимо учитывать
множество ограничений, противоречивых критериев,
фактор неопределённости, а также производить выбор
из большого количества конкретных моделей оборудования [3].
Существуют различные методы выбора оптимального состава оборудования, большинство из которых
основано на так называемых методах многокритериального принятия решений (multi-criteria decision-making) и методах нечёткой логики (fuzzy logic) [4,5]. В работе [6] была разработана экспертная система для выбора оптимального оборудования для внутрискладских перевозок. Способ комбинирования методов нечётких множеств, аналитической иерархии (МАИ) с
методом PROMETHEE представлен в работе [7]. МАИ
позволяет создавать многоуровневую структуру критериев выбора [8]. Интеграция МАИ и экспертных систем предложена в работе [9], в которой представлена
система MHESA (Material Handling Equipment Selection
Advisor – экспертная система по выбору оборудования
для погрузочно-разгрузочных работ). Гибридный ме-
Стойчич М., Стевич Ж., Николич А., Божичкович З., 2019.
4
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
Многокритериальная модель оценки и выбора автоматически …
тод, основанный на комбинировании экспертной системы с методами нечёткой логики и генетическими
алгоритмами, представлен в [10].
Ключевую роль в автоматизации складов играет
особый вид транспортных средств – автоматически
управляемые транспортные средства (AGV – Automatic Guided Vehicles). Основными преимуществами
использования AGV являются: снижение затрат на
оплату труда складских рабочих; повышение надёжности, безопасности и производительности погрузочноразгрузочных и транспортно-складских работ; повышение сохранности грузов; возможность автоматизации управления работой всего транспортно-складского комплекса.
В настоящей статье представлена методика оценки
и выбора AGV для складов на основе использования
гибридной FUCOM-EDAS модели. Насколько нам известно, в настоящее время отсутствуют исследования
в области комбинирования методов FUCOM (Full Consistency Method – метод полной согласованности) и
EDAS (The Evaluation based on Distance from Average
Solution – оценка отклонения от среднего решения) для
решения задачи оценки и выбора AGV для складов.
Материал статьи организован следующим образом. Во втором разделе представлено подробное описание используемых в работе методов. Показано, что
метод FUCOM используется для расчёта весовых коэффициентов критериев, а метод EDAS – для определения наилучшего решения. В третьем разделе анализируются типы AGV, а также приводится описание их
основных функций. Четвёртый раздел содержит описание разработанной методики выбора AGV и пример её
применения для девяти альтернатив – конкретных моделей AGV. Выбор осуществлялся по семи критериям,
которые наиболее часто используются на практике при
выборе этих транспортных средств. В пятом разделе
представлены результаты анализа чувствительности
полученных результатов с использованием методов
WASPAS (Weighted Aggregated Sum Product Assessment – метод совокупной взвешенной суммы), SAW
(Simple Additive Weighting - метод простого аддитивного взвешивания), MABAC (Multi-Attributive Border
Approximation Area Comparison – метод сравнения
мультикритериальных разграниченных областей) и
ARAS (Additive Ratio Assessment – метод оценки аддитивного отношения). В заключении представлены выводы о достоинствах представленного комбинированного метода.
2. Методы исследования
Применение многокритериальных методов принятия решений позволяет выбирать рациональные стратегии, оптимизировать логистические и транспортные
процессы, обосновывать разнообразные управленческие решения. Примеры использования различных
многокритериальных методов для решения разнообразных задач в области производства, транспорта, логистики, информационных технологий и т.д. представлены в работах [11–16].
В настоящей статье представлена комбинация
Стойчич М., Стевич Ж., Николич А., Божичкович З.
двух методов: метод FUCOM используется для расчёта
весовых коэффициентов критериев; метод EDAS – для
выбора наилучшего из потенциальных решений. Для
оценки чувствительности полученных результатов и
разработанной
модели
использованы
методы
WASPAS, SAW, MABAC и ARAS.
2.1 Метод FUCOM
Метод FUCOM был разработан Pamučar, Stević и
Sremac [17] для определения весов критериев. По мнению авторов, этот метод превосходит метод аналитической иерархии (МАИ) и метод BWM (Best Worst
Method – «лучший худший способ»). FUCOM предоставляет возможность проверить модель, рассчитав
размер ошибки для полученных векторов веса критериев, определив степень согласованности. В моделях
BWM [18] и МАИ [19] при определении весов критериев имеется избыточность из-за парного сравнения.
Такая избыточность не позволяет адекватно отразить
ошибки в суждениях экспертов. Процедура метода
FUCOM устраняет эту проблему. Данная процедура
получения весовых коэффициентов критериев включает в себя следующие этапы.
Этап 1. Ранжирование предварительно отобранных критериев С = {C1, C2, …, Cn}. Ранжирование выполняется в соответствии со значимостью критериев,
начиная с критерия, который, как ожидается, будет
иметь самый высокий весовой коэффициент, до критерия наименьшей значимости
(1)
C j (1) > C j (2) > ... > C j ( k ) .
Этап 2. Сравнение ранжированных критериев и
определение сравнительного приоритета (φk/(k+1), k=1,2
…, n, где k – ранг критериев) критериев оценки
(2)
Φ = ϕ1/ 2 , ϕ 2/3 ,..., ϕ k /( k +1) .
(
)
Этап 3. Вычисление окончательных значений весовых коэффициентов критериев оценки (w1, w2,…, wn)T.
Эти значения должны удовлетворять следующим двум
условиям:
а) соотношение весовых коэффициентов должно
быть равно сравнительному приоритету критериев
φk/(k+1), определённых этапе 2, то есть выполняется следующее условие
wk
= ϕ k /( k +1) ;
wk +1
(3)
б) окончательные значения весовых коэффициентов должны удовлетворять условию математической
транзитивности, то есть φk/(k+1) φ(k+1)/(k+2) = φk/(k+2). С
учётом выражения (3) и φ(k+1)/(k+2) = w(k+1)/w(k+2) получаем
wk
w
wk
.
⊗ k +1 =
wk +1 wk + 2 wk + 2
Таким образом, получаем другое условие, которому должны удовлетворять конечные значения весовых коэффициентов критериев оценки
wk
=
ϕk /( k +1) ⊗ ϕ( k +1)/( k + 2) .
wk + 2
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
(4)
5
ЛОГИСТИКА
Окончательно модель определения значений весовых коэффициентов критериев оценки запишется следующим образом
min χ ,
при условиях :
w j (k )
w j ( k +1)
w j (k )
w j ( k + 2)
n
∑ w=
j =1
j
Для критериев «выгода» элементы матриц (9, 10)
рассчитываются по формулам
PDAij =
NDAij =
− ϕk /( k +1) =∀
χ , j,
− ϕk /( k +1) ⊗ ϕ( k +1)/( k + 2) =
χ , ∀j ,
(5)
1, ∀j ,
w j ≥ 0, ∀j.
PDAij =
х11
х
21
х31
=
X =
хij
nm
хn1
х12
х22
х32
хn 2
х1m
х2 m
х3m ,
хnm
(6)
где хij – значение i-й альтернативы согласно j-му критерию.
Этап 3: Расчёт средних значений критериев
(7)
AV = AV j ,
1m
где
i =n
AV j =
∑X
i =1
n
ij
.
(8)
Этап 4. Расчёт значений элементов матрицы положительных расстояний от среднего (PDA – the Positive
Distance from Average) и отрицательных расстояний от
среднего (NDA – the Negative Distance from Average) в
зависимости от цели критериев (выгода или затраты)
согласно следующим формулам:
(9)
PDA = PDAij ,
nm
NDA = NDAij
6
nm
.
(10)
(
),
(11)
),
(12)
),
(13)
),
(14)
max 0, ( AV j − X ij )
AV j
(
max 0, ( AV j − X ij )
AV j
(
max 0, ( X ij − AV j )
AV j
где PDAij и NDAij – соответственно, положительное и
отрицательное расстояние i-й альтернативы от среднего значения j-го критерия.
Этап 5. Расчёт взвешенных значений PDA и NDA
для всех альтернатив по формулам
j =m
SPi = ∑ w j PDAij ,
2.2 Метод EDAS
Метод EDAS был разработан Keshavarz Ghorabaee
и др. [20] и применялся для решения задачи многокритериальной классификации запасов. Метод состоит из
следующих этапов.
Этап 1: Выбор наиболее важных критериев, которые описывают альтернативы.
Этап 2: Формирование исходной матрицы принятия решений
AV j
а для критерия «затраты» по формулам
NDAij =
В результате решения модели (5) получаются значения критериев оценки (w1, w2,…, wn)T и величины отклонения от полной согласованности ( χ ) полученных
результатов.
(
max 0, ( X ij − AV j )
(15)
j =1
j =m
SN i = ∑ w j NDAij ,
(16)
j =1
где wj – вес j-го критерия.
Этап 6. Нормализация значений SP и SN для всех
альтернатив согласно следующим выражениям
SPi
,
max i ( SPi )
SN i
.
NSN i = 1 −
max i ( SN i )
NSPi =
(17)
(18)
Этап 7. Расчёт балльных оценок (AS – the Appraisal
Score) для всех альтернатив по формуле
=
ASi
1
( NSPi + NSNi ) ,
2
(19)
где 0 ≤ ASi ≤ 1.
Этап 8. Ранжирование альтернатив в порядке
уменьшения значений оценочного балла (AS). Альтернатива с самым высоким значением AS является лучшим выбором среди потенциальных альтернатив.
3. Автоматически управляемые транспортные
средства
К автоматически управляемым транспортным
средствам часто относят грузовые транспортные средства с автономным приводом, имеющие собственный
источник энергии и оборудованные грузозахватными
устройствами. Согласно другим определениям, транспортными средствами с автоматическим управлением,
обозначаемые аббревиатурой AGV, являются беспилотные наземные транспортные средства с компьютерным управлением и, чаще всего, с электрическим питанием от батарей. Важно подчеркнуть, что эти транс-
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
Многокритериальная модель оценки и выбора автоматически …
портные средства не имеют водителей, то есть они могут функционировать без операторов. Эффективность
применения таких средств обычно обосновывается
возможностью сокращения до 75% затрат на заработную плату по сравнению с неавтоматизированными
процессами.
Начало использования транспортных средств с автоматическим управлением связано с достижением
американской компании Barrett Vehicle Systems, которая в 1954 году впервые смогла автоматизировать
авто-буксировщик, движение которого регулировалось механически проводом, расположенным над
транспортным средством. В последующем разработки
в этой области осуществлялись в Германии компаниями Jungheinrich и Wagner (1963 год). С 1970 года автоматически управляемые транспортные средства используются в больницах [21].
Системы AGV включают в себя транспортные
средства, систему управления и дополнительное оборудование. Современные наземные транспортные
средства управляются встроенными в них микропроцессорами. В большинстве случаев работа AGV координируется системой управления, которая решает различные задачи координации и оптимизации: распределяет заказы на перевозку; отслеживает транспортные
средства и перевозимые ими грузы; регулирует потоки
автоматически управляемых транспортных средств на
складах в соответствии с различными приоритетами
[22].
3.1 Типы автоматически управляемых
транспортных средств
Системы AGV обеспечивают высокую степень
гибкости и автоматизации при транспортировке грузов, зачастую не требуют внесения существенных изменений в конструкцию существующих погрузочноразгрузочных и транспортных средств. Грузоподъёмность AGV варьируется от 1 кг до 100 т. По этому признаку мы различаем следующие типы AGV:
• тягачи (towing vehicles);
• транспортёры штучных грузов (unit load vehicles);
• тележки (pallet trucks);
• вилочные погрузчики (forklift trucks);
• транспортные средства специального назначения
(special-purpose vehicles).
Тягачи были первыми автоматизированными
транспортными средствами и остаются самыми популярным типом AGV в настоящее время. Они имеют
грузоподъёмность от 4 до 25 т и могут транспортировать несколько прицепов. Тягачи обычно применяются
для обеспечения внешних перевозок склада, а также
для работы в зоне погрузки и выгрузки грузов.
Транспортёры штучных грузов – тип транспортного средства для перевозки грузов на платформе, которая обеспечивает как подъем груза, так и его горизонтальное перемещение на ней для погрузки или выгрузки конвейерами различного типа. Транспортёры
используются для транспортировки на короткие расстояния и обеспечивают высокую скорость грузопо-
Стойчич М., Стевич Ж., Николич А., Божичкович З.
тока. Благодаря возможности автоматического подключения к конвейерам, автоматизированным системам хранения и поиска грузов (AS/RS – Automated
Storage and Retrieval System) они часто интегрируются
в существующие системы автоматизации складов или
производственных линий.
Автоматические тележки предназначены для
транспортировки грузов на поддонах, как правило, на
небольшие расстояния внутри склада. Перемещение
поддона происходит путём его подъёма не небольшую
высоту над уровнем пола. Загрузка тележек может осуществляться двумя способами – автоматически, с использованием средств позиционирования груза на тележке или вручную.
Вилочные погрузчики с автоматическим управлением являются новейшим типом AGV. По внешнему
виду и функциям они похожи на традиционные вилочные погрузчики. В дополнение к транспортировке погрузчики обеспечивают подъем пакетированных грузов на большую, по сравнению с тележками, высоту.
Это делает пригодным использование погрузчиков в
складских системах, где требуется полная автоматизация и большая гибкость в соединении с другими автоматизированными подсистемами. Новейшая тенденция развития автоматически управляемых вилочных
погрузчиков заключается в полной автоматизации операций транспортирования, размещения грузов на
складе, а также погрузки и выгрузки грузов с внешнего
транспорта.
Транспортные средства специального назначения
с автоматическим управлением – это автомобили для
перевозки тяжеловесных (весом до 65 тонн) и негабаритных грузов.
3.2 Основные функции автоматически
управляемых транспортных средств
Для того чтобы системы автоматически управляемых транспортных средств функционировали на
складе, где они установлены, и без труда выполняли
свои задачи, важно, чтобы они имели возможность выполнять несколько основных функций, таких как:
• навигация (guidance);
• маршрутизация (routing);
• управление потоком транспортных средств (traffic
management);
• перегрузка (load transfer);
• управление системой AGV (system management).
Навигация AGV может осуществляться на основе
двух принципов – «заданная траектория» и «свободное
движение». Движение по заданной траектории может
осуществляться с использованием механических, индуктивных и оптических устройств. Обеспечение движения AGV по произвольной траектории осуществляется с использованием лазерного наведения.
Функция маршрутизации AGV обеспечивает движение транспортных средств по оптимальному маршруту по всей территории склада. Функция маршрутизации реализуется двумя методами. Первый «метод
выбора частоты» (frequency selection method) предпо-
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
7
ЛОГИСТИКА
лагает следование транспортного средства по маршруту, задаваемому сигналом определённой частоты.
Различные маршруты движения по складу формируются сигналами разных генераторов. Второй метод –
«метод выбора с переключением» (selection method
with a switch) основан на периодическом включении
или выключении сигналов, определяющих различные
маршруты движения.
Управление потоком транспортных средств – это
функция системы AGV, обеспечивающая движение
транспортных средств без столкновений, особенно в
условиях увеличения плотности транспортного потока. Существует три типа управления потоком транспортных средств: «контроль зоны» (zone control) – контролируемая территория разбивается на фиксированные зоны, в каждой из которых может находиться не
более одного транспортного средства; сенсорный контроль (sensor control) – транспортные средства оборудуются датчиками столкновения; комбинаторный контроль (combinatorial control) – комбинация контроля
первых двух типов.
Перегрузка в системе AGV может производиться
вручную, путём автоматического соединения (разъединения) с другими погрузочно-разгрузочными средствами и устройствами, а также с использованием
средств и устройств горизонтального, вертикального и
горизонтально-вертикального перемещения грузов.
Управление системой AGV обеспечивает диспетчеризацию транспортных средств, а также мониторинг
функционирования всей системы.
4. Выбор автоматически управляемых
транспортных средств
Для выбора AGV в исследовании использовались
два метода: метод FUCOM для определения весовых
коэффициентов критериев оценки и метод EDAS для
определения наилучшего решения. Выбор осуществлялся среди девяти альтернатив (девяти моделей AGV)
с использованием семи критериев.
4.1 Разработка многокритериальной модели
В расчётном примере покупатель AGV оценивает
ограниченный набор альтернатив, используя следующие семь критериев: C1 – размеры; C2 – минимальная
высота подъёма; C3 – цена; C4 – грузоподъёмность; C5
– ёмкость аккумуляторной батареи; C6 – максимальная
высота подъёма; C7 – скорость. В табл. 1 представлен
перечень моделей выбираемых вилочных погрузчиков
и значения критериев для каждой модели.
Таблица 1
Исходная матрица принятия решений
Альтернативы
A1
A2
A3
A4
A5
A6
A7
A8
A9
C1, мм
AGV OKDD16
1480x896x825
AGV OKDD16-III
1480x896x825
AGV OKDD20
1480x896x825
EFORK CDD10-25
2120x850x1830
OKAVGV OK-FDuX-JX-II 1480x896x825
AMA MLF1500AGV
1975x796x3493
EFORK YF-JG01 1098
2500x1100x2500
HICTRL HAS16
2125x1160x2450
HICTRL HAR18
2455x2630x2100
4.2 Расчёт веса критериев с использованием
метода FUCOM
Расчёт веса методом FUCOM в примере производится для семи критериев: C1 – размеры (min); C2 –
минимальная высота подъёма (min); C3 – цена (min);
C4 – грузоподъёмность (max); C5 – ёмкость аккумулятора (max); C6 – максимальная высота подъёма (max);
C7 – скорость (max). Первые три критерия относятся к
типу критериев «затраты», а остальные четыре – «выгода».
Этап 1. Лица, принимающие решения, проводят
ранжирование критериев на основе консенсуса: C4 =
C7 > C1 > C3 > C6 > C5 > C2.
Этап 2. Попарное сравнение лицами, принимающими решения, критериев, проранжированных на первом этапе. Сравнение проводится с критерием C4, имеющим наивысший ранг. Для сравнения используется
шакала [1,9]. В результате определяются приоритеты
8
C2, мм
85
85
85
80
85
100
80
80
80
Критерии
C3, $
C4, кг
90000
1600
90000
1600
90000
2000
75000
1000
90000
2500
65000
1500
110000 2000
85000
1600
85000
1800
C5, А∙ч
240
240
260
210
240
240
210
240
315
C6, мм
3000
4500
2500
2050
2050
3900
3000
3000
3000
C7, км/ч
5
5
5
5.8
5
5.8
5.8
3
3
критериев ( ϖ C j ( k ) ) для всех рассматриваемых критериев (табл. 2).
Приоритет
ϖC
j(k )
Приоритеты критериев
Критерии
C4 C7 C1
C3
C6
1
1
1.5
1.9
2.6
Таблица 2
C5
2.9
C2
3.1
На основании полученных приоритетов критериев
рассчитываются сравнительные приоритеты критериев φc4/c7 = 1/1 = 1, φc7/c1 = 1.5/1 = 1.5, φc1/c3 = 1.9/1.5 =
1.27, φc3/c6 = 2.6/1.9 = 1.37, φc6/c5 = 2.9/2.6 = 1.11, φc5/c2 =
3.1/2.9 = 1.07.
Этап 3. Проверка окончательных значений весовых коэффициентов условиям (3) и (4).
Для условия (3): w4/w7 = 1, w7/w1 = 1.5, w1/w3 = 1.27,
w3/w6 = 1.37, w6/w5 = 1.11, w5/w2 = 1.07.
Для условия (4): w4/w1 = 1∙1.5 = 1.5, w7/w3 = 1.5∙1.27
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
Многокритериальная модель оценки и выбора автоматически …
Стойчич М., Стевич Ж., Николич А., Божичкович З.
= 1.91, w1/w6 = 1.27∙1.37 = 1.74, w3/w5 = 1.37∙1.11 = 1.52,
w6/w2 = 1.11∙1.07 = 1.19.
С учётом выражения (5) получаем модель определения значений весовых коэффициентов критериев
оценки
min χ ,
нием 0.236. После них следует первый критерий (размеры) со значением 0.157. За ними следуют третий
(цена) – 0.124, шестой (максимальная высота подъёма)
– 0.091, пятый (ёмкость аккумуляторной батареи) –
0.081 и второй (минимальная высота подъёма) – 0.076
критерии.
w4
w7
w1
1.5 χ ,
−1 χ ,
−=
− 1.27
= χ,
=
w1
w3
w7
w3 − 1.37 = χ , w6 − 1.11 = χ , w5 − 1.07 = χ ,
w6
w5
w2
w
w4
w1
− 1.5= χ , 7 − 1.91= χ ,
− 1.74= χ ,
w
w
w
3
6
1
w3 − 1.52 = χ w6 − 1.19 = χ ,
w5
w2
7
w= 1, w ≥ 0, ∀j.
j
j
∑
j =1
4.3 Оценка и ранжирование альтернатив
с использованием метода EDAS
В результате решения данной модели получаем
значения весовых коэффициентов: w1 = 0.157, w2 =
0.076, w3 = 0.124, w4 = 0.236, w5 = 0.081, w6 = 0.091, w7
= 0.236, а значение величины отклонения от полной согласованности (Deviation from Full Consistency – DFC)
результатов составляет χ = 0.0013 или 13%. Полученное значений DFC свидетельствует об объективности
полученных результатов, что позволяет сделать вывод
о применимости метода FUCOM для решения рассматриваемой задачи.
Кроме того, метод FUCOM, на основании значений веса критериев, позволяет сделать вывод о важности этих критериев. В представленном примере наиболее важными критериями являются четвёртый (грузоподъёмность) и седьмой (скорость) критерии со значе-
Критерии
C1
C2
C3
C4
C5
C6
C7
Критерии
C1
C2
C3
C4
C5
C6
C7
A1
1
85
90000
1600
240
3000
5
A1
1
85
90000
1600
240
3000
5
A2
1
85
90000
1600
240
4500
5
A2
1
85
90000
1600
240
4500
5
A3
1
85
90000
2000
260
2500
5
Метод EDAS позволяет определить наилучшее решение проблемы.
Этап 1. На первом этапе выбираются наиболее
важные критерии оценки альтернативных решений.
Для рассматриваемого примера эти критерии такие же,
как и при использовании метода FUCOM: C1 – размеры; C2 – минимальная высота подъёма; C3 – цена;
C4 – грузоподъёмность; C5 – ёмкость аккумуляторной
батареи; C6 – максимальная высота подъёма; C7 – скорость.
Этап 2. Построение исходной матрицы принятия
решений согласно выражению (6). В табл. 3 представлена исходная матрица принятия решений для альтернатив (табл. 1).
Этап 3. Расчёт средних значений критериев по
формулам (7, 8). Результаты расчёта представлены в
табл. 4.
Этап 4. Расчёт положительных (PDA) и отрицательных (NDA) расстояний значений матрицы (табл. 4)
от средних значений, в соответствии с целями критериев по формулам (9-14). Результаты расчётов представлены в табл. 5 и 6.
Этап 5. Расчёт значений взвешенных сумм PDA и
NDA для всех альтернатив по формулам (15, 16). Результаты расчёта взвешенных матриц PDA и NDA
представлены в табл. 7 и 8.
Исходная матрица принятия решений
Альтернативы
A3
A4
A5
A6
A7
1
3
1
5
7
85
80
85
100
80
90000
75000
90000
65000
110000
2000
1000
2500
1500
2000
260
210
240
240
210
2500
2500
2050
3900
3000
5
5.8
5
5.8
5.8
Средние значения критериев
Альтернативы
A4
A5
A6
A7
A8
3
1
5
7
5
80
85
100
80
80
75000 90000 65000 110000 85000
1000
2500
1500
2000
1600
210
240
240
210
240
2500
2050
3900
3000
3000
5.8
5
5.8
5.8
3
Таблица 3
A8
5
80
85000
1600
240
3000
3
A9
7
80
85000
1800
315
3000
3
Цель
MIN
MIN
MIN
MAX
MAX
MAX
MAX
Таблица 4
A9
7
80
85000
1800
315
3000
3
Цель
MIN
MIN
MIN
MAX
MAX
MAX
MAX
AVj
Wj
0.157
84.44
0.076
86666.67 0.124
1733.33 0.236
243.89 0.081
3050.00 0.091
4.82
0.236
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
9
ЛОГИСТИКА
Критерии
C1
C2
C3
C4
C5
C6
C7
Критерии
C1
C2
C3
C4
C5
C6
C7
Критерии
C1
C2
C3
C4
C5
C6
C7
SPi
Критерии
C1
C2
C3
C4
C5
C6
C7
SNi
A1
0.710
0.000
0.000
0.000
0.000
0.000
0.037
Положительные расстояния (PDA) значений альтернатив от среднего
Альтернативы
A2
A3
A4
A5
A6
A7
A8
0.710
0.710
0.129
0.710
0.000
0.000
0.000
0.000
0.000
0.053
0.000
0.000
0.053
0.053
0.000
0.000
0.135
0.000
0.250
0.000
0.019
0.000
0.154
0.000
0.442
0.000
0.154
0.000
0.000
0.066
0.000
0.000
0.000
0.000
0.000
0.475
0.000
0.000
0.000
0.279
0.000
0.000
0.037
0.037
0.203
0.037
0.203
0.203
0.000
A1
0.000
0.007
0.038
0.077
0.016
0.016
0.000
Отрицательные расстояния (NDA) значений альтернатив от среднего
Альтернативы
A2
A3
A4
A5
A6
A7
A8
0000
0.000
0.000
0.000
0.452
1.032
0.452
0.007
0.007
0.000
0.007
0.184
0.000
0.000
0.038
0.038
0.000
0.038
0.000
0.269
0.000
0.077
0.000
0.423
0.000
0.135
0.000
0.077
0.016
0.000
0.139
0.016
0.016
0.139
0.016
0.000
0.180
0.180
0.328
0.000
0.016
0.016
0.000
0.000
0.000
0.000
0.000
0.000
0.378
A1
0.111
0.000
0.000
0.000
0.000
0.000
0.009
0.120
A2
0.111
0.000
0.000
0.000
0.000
0.043
0.009
0.163
Матрица взвешенных значений PDA
Альтернативы
A3
A4
A5
A6
A7
0.111
0.020
0.111
0.000
0.000
0.000
0.004
0.000
0.000
0.004
0.000
0.017
0.000
0.031
0.000
0.036
0.000
0.104
0.000
0.036
0.005
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.025
0.000
0.009
0.048
0.009
0.048
0.048
0.162
0.089
0.225
0.104
0.088
A2
0.000
0.001
0.005
0.018
0.001
0.000
0.000
0.025
Матрица взвешенных значений NDA
Альтернативы
A3
A4
A5
A6
A7
0.000
0.000
0.000
0.071
0.162
0.001
0.000
0.001
0.014
0.000
0.005
0.000
0.005
0.000
0.033
0.000
0.100
0.000
0.032
0.000
0.000
0.011
0.001
0.001
0.011
0.016
0.016
0.030
0.000
0.001
0.000
0.000
0.000
0.000
0.000
0.022
0.128
0.036
0.118
0.208
A1
0.000
0.001
0.005
0.018
0.001
0.001
0.000
0.026
Этап 6. Нормализация значений SP и SN для всех
альтернатив в соответствии с формулами (17, 18).
Значения, полученные для NSPi: 0.535; 0.728;
0.721; 0.396; 1.000; 0.464; 0.393; 0.028; 0.174.
Значения, полученные для NSNi: 00.896; 0.902;
0.914; 0.495; 0.856; 0.553; 0.176; 0.284; 0.000.
Этап 7. Расчёт бальной оценки (AS) для всех альтернатив по формуле (19). Значения рассчитанных оценок AS: A1 = 0.716; A2 = 0.815; A3 = 0.817; A4 = 0.446;
10
Таблица 5
A9
0.000
0.053
0.019
0.038
0.292
0.000
0.000
Wj
0.157
0.076
0.124
0.236
0.081
0.091
0.236
Таблица 6
A9
1.032
0.000
0.000
0.000
0.000
0.016
0.378
Wj
0.157
0.076
0.124
0.236
0.081
0.091
0.236
Таблица 7
A8
0.000
0.004
0.002
0.000
0.000
0.000
0.000
0.006
A9
0.000
0.004
0.002
0.009
0.024
0.000
0.000
0.039
maxi(SPi)
0.225
Таблица 8
A8
0.071
0.000
0.000
0.018
0.001
0.001
0.089
0.181
A9
0.162
0.000
0.000
0.000
0.000
0.001
0.089
0.253
maxi(SNi)
0.253
A5 = 0.928; A6 = 0.499; A7 = 0.284; A8 = 0.156; A9 =
0.097.
Этап 8. В результате ранжирования альтернатив в
порядке уменьшения значения оценочного балла (AS)
получается следующий приоритет альтернатив: A5 →
A3 → A2 → A1 → A6 → A4 → A7 → A8 → A9. Таким
образом, альтернатива А5, соответствующая погрузчику OKAVGV OK-FDuX-JX-II, является лучшим решением.
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
Многокритериальная модель оценки и выбора автоматически …
5. Анализ чувствительности
Реализация представленной процедуры анализа
альтернатив при наличии нескольких критериев позволяет по-новому подходить к принятию решений в различных областях. Многокритериальный выбор предполагает наличие набора доступных альтернатив и нескольких критериев. Каждый критерий выбора характеризуется определённым весом. Интуитивно понятно,
что больший вес подразумевает большую значимость
критерия. Анализ чувствительности результатов многокритериального выбора позволяет, с другой стороны, взглянуть на проблему принятия решений, вводя
дополнительное условие критичности критериев.
«Критичность» позволяет учитывать влияние изменения значимости критериев на принимаемое решение.
Другими словами, может оказаться, что критерии, характеризующиеся малым весом, могут оказаться кри-
Стойчич М., Стевич Ж., Николич А., Божичкович З.
тическими в определённых ситуациях, то есть стать решающими в процессе принятия решения. Таким образом, анализ чувствительности позволяет получить
представление о ситуациях, которые до этого игнорировались, повысит эффективность процесса многокритериального выбора, и, в итоге, к принятию наилучшего решения. В этой статье применяются четыре метода анализа чувствительности: WASPAS (Weighted
Aggregated Sum Product Assessment – метод совокупной взвешенной суммы) [23]; SAW (Simple Additive
Weighting – метод простого аддитивного взвешивания)
[24]; MABAC (Multi-Attributive Border Approximation
Area Comparison – метод сравнения мультикритериальных разграниченных областей) [25]; ARAS
(Additive Ratio Assessment – метод оценки аддитивного
отношения) [26]. Результат ранжирования альтернатив
с использованием перечисленных методов представлен в табл. 9.
Таблица 9
Результаты ранжирования альтернатив с использованием различных методов оценки чувствительности
Методы анализа чувствительности
Альтернативы
WASPAS
SAW
MABAC
ARAS
Оценка
Ранг
Оценка
Ранг
Оценка
Ранг
Оценка
Ранг
A1
0.789
0.795
0.078
0.796
4
4
4
4
A2
0.819
0.825
0.134
0.829
3
3
3
3
A3
0.823
0.828
0.138
0.830
2
2
2
2
A4
0.641
0.671
0.017
0.639
7
7
6
7
A5
0.851
0.861
0.184
0.864
1
1
1
1
A6
0.694
0.734
0.070
0.702
5
5
5
5
A7
0.661
0.711
-0.008
0.677
6
6
7
6
A8
0.572
0.598
-0.162
0.576
9
9
9
9
A9
0.585
0.627
-0.125
0.603
8
8
8
8
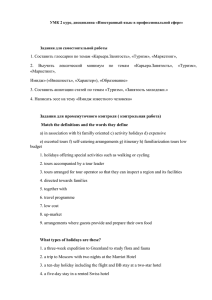
На рис. 1 графически показаны ранги альтернатив
по результатам расчётов каждым из четырёх используемых методов анализа чувствительности. Как видно из
рисунка, лучшим вариантом является альтернатива A5,
следом за ней в рейтинге следует альтернатива A3.
значению оценки по всем четырём методам.
Остальные альтернативы имеют более низкие значения оценок и имеют меньший рейтинг. По результатам оценки всеми методами третья, четвёртая и пятая
позиции заняты, соответственно, альтернативами A2,
A1 и A6. Шестую позицию занимают альтернативы A7
по результатам оценки методами WASPAS, SAW и
ARAS и A4 – методом MABAC. Седьмая позиция – A4
(WASPAS, SAW и ARAS) и A7 (MABAC). Восьмая позиция – A9 по всем методам. Последнюю девятую позицию занимает альтернатива А8.
6. Заключение
Рис. 1. Результаты анализа чувствительности
гибридной FUCOM-EDAS модели
Из табл. 9 видно, что эти две альтернативы являются лучшими, поскольку они получили близкие по
Складирование как сложная функциональная подсистема логистики предполагает наличие множества
вариантов управленческих решений. Это особенно актуально для ряда стран Восточной и Юго-Восточной
Европы, в частности, для Боснии и Герцеговины, поскольку, по сравнению с экономически развитыми Западными странами, здесь наблюдается недостаточно
широкое распространение современных технологий. В
статье исследуется проблема повышения уровня автоматизации складов на основе выбора оптимальной модели оптимального автоматически управляемого
транспортного средства – AGV. Использование AGV
позволяет значительно повысить эффективность
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
11
ЛОГИСТИКА
складских работ, а, следовательно, и всей цепочки поставок, снизить себестоимость конечной продукции, в
первую очередь, в результате затрат на электроэнергию.
Методы принятия многокритериальных решений
широко применяются для решения различных задач, в
том числе, для оптимизации работы транспортноскладских систем. Научная новизна настоящего исследования заключается в разработке гибридной модели
FUCOM-EDAS принятия решения в условиях наличия
множества критериев. Показана эффективность метода
FUCOM для определения весовых коэффициентов
критериев, заключающаяся в объективности и согласованности получаемых результатов. Ранжирование альтернатив (модели автоматически управляемых вилочных погрузчиков) осуществлялось с использованием
метода EDAS.
Оценка чувствительности полученных результатов, выполненная четырьмя различными методами, показала адекватность представленного гибридного
FUCOM-EDAS метода.
11.
12.
13.
14.
15.
16.
17.
Список литературы
1.
Fanisam M.BN., Dewa B., Ayush M., Yogesh M., Harshal M. Material handling equipment // International Journal of Recent Scientific Research.
2018, vol. 9, no. 2, pp. 24083–24085.
2. Kay M. G. Material Handling Equipment. Available at: https://people.engr.ncsu.edu/kay/Material_Handling_Equipment.pdf.
3. Park Y.-B. ICMESE: Intelligent consultant system for material handling
equipment selection and evaluation // Journal of Manufacturing Systems.
1996, vol. 15, no. 5, pp. 325–333. doi: 10.1016/0278-6125(96)84195-1.
4. Onut S., Kara S. S., Mert S. Selecting the suitable material handling equipment in the presence of vagueness // The International Journal of Advanced
Manufacturing Technology. 2009, vol. 44, 7-8, pp. 818–828. doi:
10.1007/s00170-008-1897-3.
5. Kulak O. A decision support system for fuzzy multi-attribute selection of material handling equipments // Expert Systems with Applications. 2005, vol.
29, no. 2, pp. 310–319. doi: 10.1016/j.eswa.2005.04.004.
6. Fisher E. L., Farber J. B., Kay M. G. Mathes: An expert system for material
handling equipment selection // Engineering Costs and Production Economics. 1988, vol. 14, no. 4, pp. 297–310. doi: 10.1016/0167-188X(88)900341.
7. Tuzkaya G., Gülsün B., Kahraman C., Özgen D. An integrated fuzzy multicriteria decision making methodology for material handling equipment selection problem and an application // Expert Systems with Applications.
2010, vol. 37, no. 4, pp. 2853–2863. doi: 10.1016/j.eswa.2009.09.004.
8. Chakraborty S., Banik D. Design of a material handling equipment selection
model using analytic hierarchy process // The International Journal of Advanced Manufacturing Technology. 2006, vol. 28, 11-12, pp. 1237–1245.
doi: 10.1007/s00170-004-2467-y.
9. Chan F.T.S. Design of material handling equipment selection system: an
integration of expert system with analytic hierarchy process approach // Integrated Manufacturing Systems. 2002, vol. 13, no. 1, pp. 58–68. doi:
10.1108/09576060210411512.
10. Mirhosseyni S. H. L., Webb P. A Hybrid Fuzzy Knowledge-Based Expert
18.
19.
20.
21.
22.
23.
24.
25.
26.
System and Genetic Algorithm for efficient selection and assignment of Material Handling Equipment // Expert Systems with Applications. 2009, vol.
36, no. 9, pp. 11875–11887. doi: 10.1016/j.eswa.2009.04.014.
Stević Ž., Pamučar D., Vasiljević M., Stojić G., Korica S. Novel Integrated
Multi-Criteria Model for Supplier Selection: Case Study Construction Company // Symmetry. 2017, vol. 9, no. 11, p. 279. doi: 10.3390/sym9110279.
Vasiljevic M., Fazlollahtabar H., Stević Ž., Vesković S. A rough multicriteria
approach for evaluation of the supplier criteria in automotive industry // Decision Making: Applications in Management and Engineering. 2018, vol. 1,
no. 1, pp. 82–96. doi: 10.31181/dmame180182v.
Zavadskas E. K., Stević Ž., TANACKOV I., PRENTKOVSKIS O. A Novel
Multicriteria Approach – Rough Step-Wise Weight Assessment Ratio Analysis Method (R-SWARA) and Its Application in Logistics // Studies in Informatics and Control. 2018, vol. 27, no. 1. doi: 10.24846/v27i1y201810.
Radović D., Stević Ž., Pamučar D., Zavadskas E., Badi I., Antuchevičiene
J., Turskis Z. Measuring Performance in Transportation Companies in Developing Countries: A Novel Rough ARAS Model // Symmetry. 2018, vol.
10, no. 10, p. 434. doi: 10.3390/sym10100434.
Nunić Z. Evaluation and selection of the PVC carpentry manufacturer using
the FUCOM-MABAC model // Operational Research in Engineering Sciences: Theory and Applications. 2019, vol. 1, no. 1, pp. 13–28. doi:
10.31181/oresta19012010113n.
Stanujkić D., Karabašević D. An extension of the WASPAS method for decision-making problems with intuitionistic fuzzy numbers: a case of website
evaluation // Operational Research in Engineering Sciences: Theory and
Applications. 2019, vol. 1, no. 1, pp. 29–39. doi:
10.31181/oresta19012010129s.
Pamučar D., Stević Ž., Sremac S. A New Model for Determining Weight
Coefficients of Criteria in MCDM Models: Full Consistency Method
(FUCOM) // Symmetry. 2018, vol. 10, no. 9, p. 393. doi:
10.3390/sym10090393.
Rezaei J. Best-worst multi-criteria decision-making method // Omega. 2015,
vol. 53, pp. 49–57. doi: 10.1016/j.omega.2014.11.009.
Saaty T. L. The analytic hierarchy process: planning, priority setting, resource allocation. New York, London: McGraw-Hill International Book Co.
1980.
Keshavarz Ghorabaee M., Zavadskas E. K., Olfat L. Multi-Criteria Inventory
Classification Using a New Method of Evaluation Based on Distance from
Average Solution (EDAS) // Informatica. 2015, vol. 26, no. 3, pp. 435–451.
doi: 10.15388/Informatica.2015.57.
Galović J. Sustavi automatski vođenih vozila: Završni Rad [Automatic
Guided Vehicles: Undergraduate thesis]. Zagreb: University of Zagreb.
2015. 80 p.
Gudelj А., Krčum M., Coric М. Modelling and multiobjective optimization for
automated guided vehicles at container terminals // 35th Conference on
Transportation Systems with International Participation Automation in transportation. 2015, Zagreb: KoREMA.
Zavadskas E. K., Turskis Z., Antucheviciene J. Optimization of Weighted
Aggregated Sum Product Assessment // Electronics and Electrical Engineering. 2012, vol. 122, no. 6. doi: 10.5755/J01.EEE.122.6.1810.
MacCrimmon K.R. Decision making among multiple-attribute alternatives: a
survey and consolidated approach. Santa Monica, California: The RAND
Corporation. 1968. 63 p.
Pamučar D., Ćirović G. The selection of transport and handling resources
in logistics centers using Multi-Attributive Border Approximation area Comparison (MABAC) // Expert Systems with Applications. 2015, vol. 42, no. 6,
pp. 3016–3028. doi: 10.1016/j.eswa.2014.11.057.
Zavadskas E. K., Turskis Z. A new additive ratio assessment (ARAS)
method in multicriteria decision‐making // Technological and Economic Development of Economy. 2010, vol. 16, no. 2, pp. 159–172. doi:
10.3846/tede.2010.10.
Материал поступил в редакцию 19.12.2018
Стойчич М., Стевич Ж., Николич А., Божичкович З. Многокритериальная модель оценки и выбора автоматически управляемых
транспортных средств (AGV) для складов // Современные проблемы транспортного комплекса России. 2019. Т.9. №1. С. 4-20
12
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
A multi-criteria model for evaluation and selection of AGV’s in a warehouse …
Stojčić M., Stević Ž., Nikolić A., Božičković Z.
THE PAPER IN ENGLISH
UDC 658.286.2-52:658.78
https://doi.org/10.18503/2222-9396-2019-9-1-4-20
A MULTI-CRITERIA MODEL FOR EVALUATION AND SELECTION
OF AGV’S IN A WAREHOUSE
Stojčić Mirko1, Stević Željko1, Nikolić Andrej1, Božičković Zdravko1
1
University of East Sarajevo, Faculty of Transport and Traffic Engineering, Doboj, Bosnia and Herzegovina
Abstract
A set of tools, devices, applications aimed at facilitating the handling of material and products in a warehouse, but also between,
for example, a warehouse and a plant, represent Material Handling Equipment. The important type of material handling equipment is
automatic guided vehicles (AGV) which play a key role in warehouse automation. The advantages set by AGVs in the warehouse
automation process are reducing staff costs and labor costs, increased reliability and productivity, reduced damage of goods, improved
security, managing and controlling a complete system, etc. In the paper, a hybrid FUCOM-EDAS model is applied to select an AGV
vehicle. The FUCOM method is used to determine weight coefficients, and EDAS to obtain the best solution. The selection is based
on nine AGV vehicles and seven criteria. To evaluate the stability of the obtained results and the applied model, the assessment and
ranking of alternatives is performed by WASPAS, SAW, MABAC and ARAS methods. Preliminary results show that two alternatives
are best, since the same results were obtained by all four methods, with priority given to the alternative A5.
Keywords: AGVs, FUCOM method, EDAS method, Material Handling Equipment, WASPAS, SAW, MABAC, ARAS.
1. Introduction*
Currently, logistics has been constantly facing new
challenges and changing faster than in any other period of
time. The most obvious change is the increased application
of a new technologies, especially information and communication technologies. Its application and role are visible
on every step such as electronic identification of packages,
satellite tracking of vehicles, automatic guided vehicles,
etc. One of the areas affected by new logistics trends is a
warehousing subsystem. From the history, warehouses
have faced many changes, i.e. various technologies have
been implemented in warehouses, depending on when each
of them was active. Currently, we are witnessing that warehouses could be fully automated. Many technological processes in a warehouse have been automated, from receiving
and dispatch, internal transportation, packaging, commissioning, etc. A set of tools, devices, applications aimed at
facilitating the handling of material and products in a warehouse, but also between, for example, a warehouse and a
plant, represent Material Handling Equipment. The most
general listed equipment consists of four basic categories
such as storage and handling equipment, engineered systems, industrial trucks, equipment for bulk material handling [1]. The main aim of applying new technologies for
the mentioned purpose is to save in energy and work force,
which also significantly reduce the price of the final product [2]. The selection and configuration of equipment for
carrying out material handling tasks is very sophisticated
since there are numerous limitations, opposing criteria, uncertainty, a wide range of equipment, etc. [3]. There are
various methods for selecting optimal equipment, and most
of them are based on multi-criteria decision-making along
with intelligent solutions such as fuzzy logic [4,5]. In the
paper [6], an expert system was developed to select the optimum equipment for delivering the materials within a factory. In [7] combined fuzzy sets, the Analytic Network Process and PROMETHEE method. The AHP method creates
a hierarchical structure by forming levels and sublevels [8].
The integration of the AHP method and expert systems was
proposed in [9], within the MHESA (Material Handling
Equipment Selection Advisor) system. A hybrid method
that involves the application of expert systems, fuzzy logic
and genetic algorithms was presented in [10].
The important type of material handling equipment is
automatic guided vehicles (AGV) which play a key role in
warehouse automation. The advantages set by AGVs in the
warehouse automation process are reducing staff costs and
labor costs, increased reliability and productivity, reduced
damage of goods, improved security, managing and controlling a complete system, etc.
The main purpose of this paper is to evaluate and select
an appropriate AGV for performing operations in the warehouse system by using a hybrid FUCOM-EDAS model. To
the best of our knowledge, there is no studies in the combination of FUCOM-EDAS methods to study the evaluation and selection of AGVs in a warehouse.
The rest of the paper is organized as follows. The first
part contains introduction. The second section lies in the
detailed review of the methods used in the work, which is
the FUCOM method for obtaining weight coefficients and
the EDAS method for obtaining the best solution of the set
model. In the third section, the types of AGVs are analyzed. The basic functions of these vehicles are also described in detail. In the fourth section, the selection of
AGVs is performed based on nine alternatives, i.e. nine automatic guided forklift trucks and seven criteria that are
most commonly used in the selection and implementation
Stojčić M., Stević Ž., Nikolić A., Božičković Z., 2019.
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
13
LOGISTICS
of these vehicles into a warehouse system. In the fifth section, a sensitivity analysis is performed using WASPAS,
SAW, MABAC and ARAS methods. Finally, certain conclusions are given.
2. Methods
By applying multi-criteria decision-making methods,
it is possible to select appropriate strategies, rationalize
certain logistic and other processes, and make appropriate
decisions that have an impact on the operations of companies or their subsystems, as evidenced by the following
studies [11–16].
This paper proposes the application of two methods the
FUCOM method for obtaining weight coefficients and
EDAS method for obtaining the best of potential solutions.
Additionally, within the stability evaluation of the obtained
results and the applied model, the assessment and ranking
of alternatives are performed using WASPAS, SAW,
MABAC and ARAS method.
2.1 The FUCOM method
The FUCOM method was developed by Pamučar, Stević and Sremac [17] for determining the weights of criteria.
According to the authors, this new method is better than
AHP (Analytical Hierarchy Process) and BWM (Best
Worst Method).
FUCOM provides a possibility to validate the model
by calculating the error size for obtained weight vectors, by
determining the degree of consistency. On the other hand,
in other models for determining the weights of criteria, the
BWM [18] and the AHP [19] model, redundancy in pairwise comparison appears which makes them less susceptible to errors in judgment, while the methodological procedure of FUCOM eliminates that problem.
We aim to present the procedure for obtaining weight
coefficients of criteria by applying FUCOM.
Step 1. In this step, the criteria from the predefined set
of the evaluation criteria С = {C1, C2, …, Cn} are ranked.
The ranking is performed according to the significance of
the criteria, i.e. starting from the criterion which is expected to have the highest weight coefficient to the criterion of the least significance:
(1)
C j (1) > C j (2) > ... > C j ( k ) .
Step 2. In this step, a comparison of the ranked criteria
is carried out and the comparative priority (φk/(k+1), k=1,2
…, n, where k represents the rank of the criteria) of the
evaluation criteria is determined
(2)
Φ = ϕ1/ 2 , ϕ 2/3 ,..., ϕ k /( k +1) .
(
)
Step 3. In this step, the final values of the weight coefficients of the evaluation criteria (w1, w2,…, wn)T are calculated. The final values of the weight coefficients should satisfy the following two conditions:
a) The ratio of the weight coefficients is equal to the
comparative priority among the observed criteria φk/(k+1)
defined in Step 2, i.e. the following condition is met:
wk
= ϕ k /( k +1) ;
wk +1
(3)
b) In addition to Condition (3), the final values of the
14
weight coefficients should satisfy the condition of mathematical transitivity, i.e. φk/(k+1) φ(k+1)/(k+2) = φk/(k+2).
wk
= ϕ k /( k +1) and φ(k+1)/(k+2) = w(k+1)/w(k+2) ,
wk +1
Since
wk
w
wk
is obtained.
⊗ k +1 =
wk +1 wk + 2 wk + 2
Thus, another condition that the final values of the
weight coefficients of the evaluation criteria need to meet
is obtained, namely:
wk
=
ϕk /( k +1) ⊗ ϕ( k +1)/( k + 2) .
wk + 2
(4)
Based on the defined settings, the final model for determining the final values of the weight coefficients of the
evaluation criteria can be defined.
min χ ,
s.t.
w j (k )
w j ( k +1)
w j (k )
w j ( k + 2)
n
∑ w=
j =1
j
− ϕ k /( k +1) =∀
χ , j,
− ϕ k /( k +1) ⊗ ϕ( k +1)/( k + 2) =
χ , ∀j ,
(5)
1, ∀j ,
w j ≥ 0, ∀j.
By solving the model (5), we obtain the final values of
evaluation criteria (w1, w2,…, wn)T and the degree of consistency ( χ ) of the results obtained.
2.1 The EDAS method
The EDAS method was developed by [20] for the
multi-criteria classification of inventories. The steps of this
method are presented below:
Step 1. Select the most important criteria that describe
alternatives.
Step 2. Form an initial decision-making matrix as
shown:
х11
х
21
х31
=
X =
хij
nm
хn1
х12
х22
х32
хn 2
х1m
х2 m
х3m ,
хnm
(6)
where хij denotes the values of the ith alternative according
to the jth criterion.
Step 3. Determine the average solution according to all
the criteria as shown:
(7)
AV = AV j ,
where
1m
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
A multi-criteria model for evaluation and selection of AGV’s in a warehouse …
3. AGVs
i =n
AV j =
∑X
i =1
ij
n
.
(8)
Step 4. Calculate the positive distance from average
(PDA) and negative distance from average (NDA) matrices
depending on the type of criteria (benefit or cost) according
to the following expressions:
(9)
PDA = PDAij ,
nm
NDA = NDAij
nm
.
If the criterion is of beneficial type,
PDAij =
NDAij =
(
max 0, ( X ij − AV j )
NDAij =
(10)
),
(11)
),
(12)
),
(13)
),
(14)
max 0, ( AV j − X ij )
and if it is a cost criterion,
PDAij =
AV j
(
AV j
(
max 0, ( AV j − X ij )
AV j
(
max 0, ( X ij − AV j )
AV j
where PDAij and NDAij denote the positive and negative
distance of the ith alternative from the average solution in
accordance to the j criterion, respectively.
Step 5. Determine the weighted sum of PDA and NDA
for all alternatives as follows:
j =m
SPi = ∑ w j PDAij ,
(15)
j =1
j =m
SN i = ∑ w j NDAij ,
(16)
j =1
where wj is the weight of jth criterion.
Step 6. Normalization of SP and SN values for all alternatives according to the following expressions:
SPi
,
max i ( SPi )
SN i
.
NSN i = 1 −
max i ( SN i )
NSPi =
(17)
(18)
Step 7. The appraisal score (AS) for all alternatives according to the following expression:
=
ASi
Stojčić M., Stević Ž., Nikolić A., Božičković Z.
1
( NSPi + NSNi ) ,
2
(19)
where 0 ≤ ASi ≤ 1.
Step 8: Rank alternatives according to decreasing values of appraisal score (AS). The alternative with the highest
AS is the best choice among the potential alternatives.
Automatic guided vehicles are defined as self-power
vehicles, with their own energy source and handling devices, intended for the transportation of materials. Another
definition of automatic guided (managed) vehicles, also
known as AGVs, says that these are unmanned ground
transportation vehicles that are computer controlled, most
electrically powered with batteries. It is important to highlight that these vehicles are without drivers, i.e. they can
function without operators, with a special emphasis on the
fact that the costs reduced by worker's salary in non-automated processes are up to about 75% of the cost. The beginning of the use of automatic guided vehicles is linked to
the achievement of the American company Barrett Vehicle
Systems, which in 1954 for the first time managed to automate a single towing vehicle with mechanical guidance, in
a way that a wire was placed above a vehicle. Then, development and further automation moved to Germany, and
since 1963, the first companies were Jungheinrich and
Wagner. Since 1970, automatic guided vehicles (AGVs)
have been involved in material flow processes and in hospitals [21].
The AGV system consists of a vehicle, a control system, and additional necessary equipment. Modern ground
vehicles are controlled by microprocessors built into them,
and most of them are monitored by a control system that
optimizes their work. It generates and distributes orders for
transportation, monitors vehicles with their loads and
serves as a traffic light for movement through a warehouse
based on priorities [22].
3.1 The types of AGVs
The systems of automatic guided vehicles are very interesting and useful since they offer a high degree of flexibility and automation in material transportation. In contrast
to many other material transportation systems, AGV systems rarely require a specific construction to support the
transportation of materials and goods. With the development of AGVs and the application of automation and a high
degree of flexibility, today we distinguish many types of
vehicles in terms of the weight of load they can transport.
Load capacity varies from less than 1 kg to up to 100 t. We
distinguish several types of AGVs:
• towing vehicles;
• unit load vehicles;
• pallet trucks;
• forklift trucks;
• special-purpose vehicles.
Towing vehicles were the first type of those vehicles
and have been used today. They are the oldest and most
popular type of AGVs. They can pull several trailers/wagons and have a capacity ranging from four to 25 tons. They
are usually applied to the transportation of loads to/from a
warehouse (receiving and dispatch zone), and since it refers to large quantities of material, they are mostly used for
loading and unloading the vehicles of external transportation.
Unit load AGV with a loading space is also a type of
vehicle that is used for the transportation of goods loaded
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
15
LOGISTICS
onto a platform on the vehicle and their transfer. These vehicles are also referred to as vehicles of unit loads (pallets,
boxes, individual pieces) and most often they also have automatic load transfer (using a lifting deck, chain, band or
roller conveyor). They are used for transportation at shorter
distances with high flow rates, and due to the ability to automatically connect to conveyors, workstations, devices
and AS/RS systems, they are often integrated into an automated manufacturing or warehousing system.
Automatic guided pallet trucks are designed for the
transportation of palletized materials, loading from the
ground and unloading onto the ground, where pallets are
lifted several centimeters from the ground, thus eliminating
the need for fixed places for the deposition of load units.
Loading of such vehicles can be in two ways: with automatic loading (necessity of correct positioning for loading)
and with manual loading (need for operator's handling the
vehicle when loading).
Automatic guided forklift trucks are the newest type of
AGVs. In their appearance and function, they are similar to
the classic versions of forklifts. In addition to transportation, the ability to transfer palletized material not only at
ground level but also at higher levels makes them suitable
and justified for application into the systems where full automation and greater flexibility in connecting with other
subsystems are required. The latest trend of automatic
guided forklift trucks enables automated delivery, application in warehousing, loading and unloading of goods
into/out of the warehouse, and also enables load transfer
into vehicles of external transportation (trucks, etc.) without manual control. Special-purpose automatic guided vehicles are vehicles for carrying heavy loads up to 65 tons
of irregular shape.
3.2 Main functions of AGVs
In order for the systems of automatic guided vehicles
to function in a warehouse where they are installed and to
carry out their tasks without difficulty, it is essential that
they have the ability to accomplish several basic functions,
such as:
• guidance;
• routing;
• traffic management;
• load transfer;
• system management.
The guidance of AGVs can be divided into two basic
categories, i.e. two basic principles. The first category is
based on the principle of fixed paths. The second category
is based on the principle of free paths. The principles of
guidance that belong to fixed-path guidance are mechanical guidance, inductive guidance, and optical guidance,
while laser guidance is applied for free guidance.
AGVs must have a system for determining the path of
movement, for example, throughout a warehouse where it
has to perform several tasks. This problem is solved with
several different methods. Routing the vehicle is the selection of the route of movement in terms of choosing an optimal route towards a particular destination. There are two
methods of routing automatic guided vehicles: a frequency
selection method and a selection method with a switch.
Traffic management is the ability of a system or vehicle to avoid collisions while maximizing the flow of vehicles and materials. There are three types of traffic management: zone control, sensor control, and combinatorial control.
Load transfer includes the method of loading and unloading, which can be simple or integrated within other
subsystems. There are various methods of load transfer,
some of which are a manual method, a method of automatic
connection and separation, a method of load transfer by
rolling, belt or chain conveyor and a lifting and lowering
method.
Management implies the methods of controlling the
system used for its operation. It can be divided into two
areas: vehicle-dispatch methods and system-monitoring
methods.
4. The selection of AGVs
For the selection of AGVs, two methods was used, the
FUCOM method for determining weight coefficients and
the EDAS method for obtaining the best solution. The selection was based on nine AGVs and seven criteria.
4.1 Forming a multi-criteria model
It has been considered an example in which a purchaser of AGV evaluates the considered alternatives using
the following seven criteria: C1 – dimensions, C2 – minimum lift height, C3 – price, C4 – capacity of AGVs, C5 –
battery capacity of AGVs, C6 – maximum lift height and
C7 – speed of AGVs. Tab. 1 provides an overview of the
alternatives that represent the types of forklift trucks and
values of criteria for each of them.
Table 1
Initial decision-making matrix
Alternatives
A1
A2
A3
A4
A5
A6
A7
A8
A9
16
C1, mm
AGV OKDD16
1480x896x825
AGV OKDD16-III
1480x896x825
AGV OKDD20
1480x896x825
EFORK CDD10-25
2120x850x1830
OKAVGV OK-FDuX-JX-II 1480x896x825
AMA MLF1500AGV
1975x796x3493
EFORK YF-JG01 1098
2500x1100x2500
HICTRL HAS16
2125x1160x2450
HICTRL HAR18
2455x2630x2100
C2, mm
85
85
85
80
85
100
80
80
80
Criteria
C3, $
C4, kg
90000
1600
90000
1600
90000
2000
75000
1000
90000
2500
65000
1500
110000 2000
85000
1600
85000
1800
C5, Ah
240
240
260
210
240
240
210
240
315
C6, mm
3000
4500
2500
2050
2050
3900
3000
3000
3000
C7, km/h
5
5
5
5.8
5
5.8
5.8
3
3
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
A multi-criteria model for evaluation and selection of AGV’s in a warehouse …
4.2 Determining criteria weights using
the FUCOM method
It has been considered an example in which a purchaser of AGV evaluates the considered alternatives using
the following seven criteria: C1 – dimensions (min), C2 –
minimum lift height (min), C3 – price (min), C4 – capacity
of AGVs (max), C5 – battery capacity of AGVs (max), C6
– maximum lift height (max) and C7 – speed of AGVs
(max). The first three criteria belong to cost criteria, while
the other four belong to benefit criteria.
Step 1. In step, the decision-makers perform the ranking of the criteria based on the consensus: C4 = C7 > C1 >
C3 > C6 > C5> C2.
Step 2. In this step, the decision-makers perform a pairwise comparison between the ranked criteria from Step 1.
The comparison is made with respect to the first-ranked C4
criterion. The comparison is based on the scale [1,9]. Thus,
the priorities of criteria ( ϖ C j ( k ) ) for all the criteria ranked
in Step 1 are obtained (Tab. 2).
Priority
ϖC
j(k )
Priorities of criteria
Criteria
C4 C7 C1
C3
C6
1
1
1.5
1.9
2.6
Table 2
C5
2.9
C2
3.1
Based on the obtained priorities of the criteria, the
comparative priorities of the criteria are calculated φc4/c7 =
1/1 = 1, φc7/c1 = 1.5/1 = 1.5, φc1/c3 = 1.9/1.5 = 1.27, φc3/c6 =
2.6/1.9 = 1.37, φc6/c5 = 2.9/2.6 = 1.11, φc5/c2 = 3.1/2.9 = 1.07.
Step 3. The final values of the weight coefficients
should meet the following two conditions:
a) The final values of the weight coefficients should
meet Condition (3), i.e. that w4/w7 = 1, w7/w1 = 1.5, w1/w3
= 1.27, w3/w6 = 1.37, w6/w5 = 1.11, w5/w2 = 1.07.
b) In addition to Condition (2), the final values of the
weight coefficients should meet the condition of mathematical transitivity, i.e. that: w4/w1 = 1∙1.5 = 1.5, w7/w3 =
1.5∙1.27 = 1.91, w1/w6 = 1.27∙1.37 = 1.74, w3/w5 =
1.37∙1.11 = 1.52, w6/w2 = 1.11∙1.07 = 1.19.
By applying Expression (5), the final model for determining the weight coefficients can be defined as:
min χ ,
w4
w
w
− 1 χ , 7 −=
= χ,
1.5 χ , 1 − 1.27
=
w
w
w
1
3
7
w3 − 1.37 = χ , w6 − 1.11 = χ , w5 − 1.07 = χ ,
w6
w5
w2
w
w4
w
− 1.5= χ , 7 − 1.91= χ , 1 − 1.74= χ ,
w3
w6
w1
w3 − 1.52 = χ w6 − 1.19 = χ ,
w5
w2
7
w= 1, w ≥ 0, ∀j.
j
j
∑
j =1
By solving this model, the final values of the weight
coefficients are w1 = 0.157, w2 = 0.076, w3 = 0.124, w4 =
Stojčić M., Stević Ž., Nikolić A., Božičković Z.
0.236, w5 = 0.081, w6 = 0.091, w7 = 0.236 and the DFC
(Deviation from Full Consistency) of the results are χ =
0.0013 or 0.13%. The obtained DFC shows the total objectivity of obtained results, which allows the application of
the FUCOM method.
By applying the FUCOM method, the criteria weights
are obtained. The results show that the most important criteria for solving this problem are the fourth and seventh
criterion with a value of 0.236. After that is the first criterion with a value of 0.157. These are followed by the third
criterion with a value of 0.124, the sixth criterion with a
value of 0.091, the fifth criterion with a value of 0.081 and
by the second criterion with a value of 0.076.
4.3 Evaluation and ranking of alternatives by applying
the EDAS method
By applying the EDAS method, the best solution to the
problem is determined, which is explained in detail below.
Step 1. Select the most important criteria that describe
alternatives.
The most important criteria are C1 – dimensions, C2 –
minimum lift height, C3 – price, C4 – vehicle capacity, C5
– vehicle battery capacity, C6 – maximum lift height, C7 –
vehicle speed.
Step 2. Construct the initial decision-making matrix
according to expression (6). Tab. 3 provides the form of
the initial decision-making matrix.
Step 3. Determine the average solution according to all
criteria based on expression (7, 8). Tab. 4 shows the average solutions.
Step 4. Calculate the positive distance from average
(PDA) and the negative distance from average (NDA) matrices in terms of the type of criteria (benefit or cost) according to expressions (9-14). The results are given in Tab.
5 and Tab. 6.
Step 5. Determine the weighted sum of PDA and NDA
for all alternatives according to expressions (15) and (16).
The weighted PDA and NDA matrices are given in Tab. 7
and Tab. 8.
Step 6. Normalization of SP and SN values for all alternatives according to expressions (17) and (18).
The values obtained for NSPi are: 0.535; 0.728; 0.721;
0.396; 1.000; 0.464; 0.393; 0.028; 0.174.
The values obtained for NSNi are: 0.896; 0.902; 0.914;
0.495; 0.856; 0.553; 0.176; 0.284; 0.000.
Step 7. Calculate the appraisal score (AS) for all alternatives according to expression (19). The values obtained
for the appraisal score (AS) are: A1 = 0.716; A2 = 0.815;
A3 = 0.817; A4 = 0.446; A5 = 0.928; A6 = 0.499; A7 =
0.284; A8 = 0.156; A9 = 0.097.
Step 8. Rank the alternatives according to the decreasing values of appraisal score (AS). The alternative with the
highest AS is the best choice among the potential alternatives: A5 → A3 → A2 → A1 → A6 → A4 → A7 → A8
→ A9. Considering the values obtained for the appraisal
score, a ranking according to decreasing values has been
performed and the above expression has been obtained.
The alternative A5 appears as the best solution, i.e. AGV
OKAVGV OK-FDuX-JX-II.
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
17
LOGISTICS
Criteria
A1
1
85
90000
1600
240
3000
5
C1
C2
C3
C4
C5
C6
C7
Criteria
C1
C2
C3
C4
C5
C6
C7
Criteria
C1
C2
C3
C4
C5
C6
C7
Criteria
C1
C2
C3
C4
C5
C6
C7
Criteria
C1
C2
C3
C4
C5
C6
C7
SPi
18
A1
1
85
90000
1600
240
3000
5
A2
1
85
90000
1600
240
4500
5
A2
1
85
90000
1600
240
4500
5
A3
1
85
90000
2000
260
2500
5
The form of the initial decision-making matrix
Alternatives
A3
A4
A5
A6
A7
1
3
1
5
7
85
80
85
100
80
90000
75000
90000
65000
110000
2000
1000
2500
1500
2000
260
210
240
240
210
2500
2500
2050
3900
3000
5
5.8
5
5.8
5.8
The average solutions according to all criteria
Alternatives
A4
A5
A6
A7
A8
A9
3
1
5
7
5
7
80
85
100
80
80
80
75000 90000 65000 110000 85000 85000
1000
2500
1500
2000
1600
1800
210
240
240
210
240
315
2500
2050
3900
3000
3000
3000
5.8
5
5.8
5.8
3
3
Table 3
A8
5
80
85000
1600
240
3000
3
Цель
MIN
MIN
MIN
MAX
MAX
MAX
MAX
A1
0.710
0.000
0.000
0.000
0.000
0.000
0.037
A1
0.000
0.007
0.038
0.077
0.016
0.016
0.000
Negative distances of the ith alternative from the average solution
Alternatives
A2
A3
A4
A5
A6
A7
A8
0000
0.000
0.000
0.000
0.452
1.032
0.452
0.007
0.007
0.000
0.007
0.184
0.000
0.000
0.038
0.038
0.000
0.038
0.000
0.269
0.000
0.077
0.000
0.423
0.000
0.135
0.000
0.077
0.016
0.000
0.139
0.016
0.016
0.139
0.016
0.000
0.180
0.180
0.328
0.000
0.016
0.016
0.000
0.000
0.000
0.000
0.000
0.000
0.378
A1
0.111
0.000
0.000
0.000
0.000
0.000
0.009
0.120
A2
0.111
0.000
0.000
0.000
0.000
0.043
0.009
0.163
A3
0.111
0.000
0.000
0.036
0.005
0.000
0.009
0.162
Goal
MIN
MIN
MIN
MAX
MAX
MAX
MAX
Table 4
Positive distances of the ith alternative from the average solution
Alternatives
A2
A3
A4
A5
A6
A7
A8
0.710
0.710
0.129
0.710
0.000
0.000
0.000
0.000
0.000
0.053
0.000
0.000
0.053
0.053
0.000
0.000
0.135
0.000
0.250
0.000
0.019
0.000
0.154
0.000
0.442
0.000
0.154
0.000
0.000
0.066
0.000
0.000
0.000
0.000
0.000
0.475
0.000
0.000
0.000
0.279
0.000
0.000
0.037
0.037
0.203
0.037
0.203
0.203
0.000
The weighted PDA matrices
Alternatives
A4
A5
A6
0.020
0.111
0.000
0.004
0.000
0.000
0.017
0.000
0.031
0.000
0.104
0.000
0.000
0.000
0.000
0.000
0.000
0.025
0.048
0.009
0.048
0.089
0.225
0.104
A9
7
80
85000
1800
315
3000
3
AVj
Wj
3.44
0.157
84.44
0.076
86666.67 0.124
1733.33 0.236
243.89 0.081
3050.00 0.091
4.82
0.236
Table 5
A9
0.000
0.053
0.019
0.038
0.292
0.000
0.000
Wj
0.157
0.076
0.124
0.236
0.081
0.091
0.236
Table 6
A9
1.032
0.000
0.000
0.000
0.000
0.016
0.378
Wj
0.157
0.076
0.124
0.236
0.081
0.091
0.236
Table 7
A7
0.000
0.004
0.000
0.036
0.000
0.000
0.048
0.088
A8
0.000
0.004
0.002
0.000
0.000
0.000
0.000
0.006
A9
0.000
0.004
0.002
0.009
0.024
0.000
0.000
0.039
maxi(SPi)
0.225
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1
A multi-criteria model for evaluation and selection of AGV’s in a warehouse …
Criteria
C1
C2
C3
C4
C5
C6
C7
SNi
A1
0.000
0.001
0.005
0.018
0.001
0.001
0.000
0.026
A2
0.000
0.001
0.005
0.018
0.001
0.000
0.000
0.025
A3
0.000
0.001
0.005
0.000
0.000
0.016
0.000
0.022
The weighted NDA matrices
Alternatives
A4
A5
A6
0.000
0.000
0.071
0.000
0.001
0.014
0.000
0.005
0.000
0.100
0.000
0.032
0.011
0.001
0.001
0.016
0.030
0.000
0.000
0.000
0.000
0.128
0.036
0.118
Stojčić M., Stević Ž., Nikolić A., Božičković Z.
Table 8
A7
0.162
0.000
0.033
0.000
0.011
0.001
0.000
0.208
A8
0.071
0.000
0.000
0.018
0.001
0.001
0.089
0.181
A9
0.162
0.000
0.000
0.000
0.000
0.001
0.089
0.253
maxi(SNi)
0.253
impact of a change in the significance or value of the criteria on the result of decision-making. Therefore, it is possiThe application of the analysis in multi-criteria deci- ble for the criteria of little significance to be critical in a
sion-making can provide a new perspective on the area of certain situation, i.e. to be decisive in a decision-making
interest. In the field of multi-criteria decision-making, the process. Thus, a sensitivity analysis can provide us a view
best alternative should be determined within a set of avail- of the situations that we have not noticed before. It can furable ones. In such decision-making, a set of evaluation cri- ther result in an analysis that is much more efficient and
teria is used. The criteria are associated with significance, finally in the implementation of a better final solution. In
i.e. weights. Intuitively, a higher weight implies the greater this paper, four methods for a sensitivity analysis are apsignificance of a criterion. A sensitivity analysis provides plied: WASPAS [23], SAW [24], MABAC [25] and ARAS
a new perspective to a decision-making issue, introducing [26], and the ranking of alternatives according to the same
criterion criticality. Regarding criticality, we can imply the methods is given in Tab. 9.
Table 9
Ranking the alternatives by applying different methods
Methods for a sensitivity analysis
Alternatives
WASPAS
SAW
MABAC
ARAS
Grade
Rank
Grade
Rank
Grade
Rank
Grade
Rank
A1
0.789
0.795
0.078
0.796
4
4
4
4
A2
0.819
0.825
0.134
0.829
3
3
3
3
A3
0.823
0.828
0.138
0.830
2
2
2
2
A4
0.641
0.671
0.017
0.639
7
7
6
7
A5
0.851
0.861
0.184
0.864
1
1
1
1
A6
0.694
0.734
0.070
0.702
5
5
5
5
A7
0.661
0.711
-0.008
0.677
6
6
7
6
A8
0.572
0.598
-0.162
0.576
9
9
9
9
A9
0.585
0.627
-0.125
0.603
8
8
8
8
5. A sensitivity analysis
Figure 1 shows the positions in the ranking of individual alternatives for each of the four methods used in the
sensitivity analysis. As it can be seen in Fig. 1, the bestranked alternative is A5 and then A3. In Tab. 9, it can be
seen that these two alternatives are identified as the best
ones, since they obtain identical results by all four methods, with an advantage being given to alternative A5. By
the calculation, other alternatives have lower values and
are less ranked than the two above mentioned, as can be
seen in the figure. Position 3 is occupied by alternative A2
according to all methods. At position 4, alternative A1 according to all methods. Position 5 is taken by alternatives
A6. Position 6 is occupied by alternatives A7 according to
WASPAS, SAW and ARAS methods, and A4 according to
MABAC method. At position 7, alternatives A4 according
to WASPAS, SAW and ARAS and A7 are ranked according to the MABAC method. Position 8 is taken by alternative A9 to all methods. The last position 9 is taken by alternative A8.
6. Conclusion
Warehousing as a subsystem of logistics is the link in
a chain that offers numerous optimization options. This is
particularly prominent in our region since the application
of modern technologies is not present as it is the case in
western countries. In the paper, an emphasis is put on warehouse automation throughout the selection of an optimum
automatic guided vehicle - AGV. As a component of material handling equipment, AGV is a solution that can
greatly improve the operation process in the warehouse itself, and therefore in the entire supply chain. Their use can
save energy, so that a lower price of a final product can be
expected if they are used in manufacturing plants.
The methods of multi-criteria decision-making are applied daily in the real world, and thus in warehouse systems. The most significant contribution of the paper is reflected in the application of FUCOM-EDAS hybrid model.
In this paper, the FUCOM method has demonstrated its ex-
http://transience.org -————————————————— Modern Problems of Russian Transport Complex. 2019, vol. 9, no.1
19
LOGISTICS
Rank
ceptional capabilities in determining the weight coefficients of criteria where the objectivity and consistency of
the obtained results could be seen.
10.
11.
12.
13.
14.
15.
Methods
Fig. 1. The results of sensitivity analysis
The ranking of the alternatives was performed according to the EDAS method and the best solution was selected,
i.e. the best automatic guided vehicle - a forklift truck. At
the end of the paper, a comparison of different multi-criteria decision-making methods was made for a specific example of the selection of automatic guided vehicles
throughout a sensitivity analysis.
1.
2.
3.
4.
5.
6.
7.
8.
9.
References
Fanisam M.BN., Dewa B., Ayush M., Yogesh M., Harshal M. Material handling equipment // International Journal of Recent Scientific Research.
2018, vol. 9, no. 2, pp. 24083–24085.
Kay M. G. Material Handling Equipment. Available at: https://people.engr.ncsu.edu/kay/Material_Handling_Equipment.pdf.
Park Y.-B. ICMESE: Intelligent consultant system for material handling
equipment selection and evaluation // Journal of Manufacturing Systems.
1996, vol. 15, no. 5, pp. 325–333. doi: 10.1016/0278-6125(96)84195-1.
Onut S., Kara S. S., Mert S. Selecting the suitable material handling equipment in the presence of vagueness // The International Journal of Advanced
Manufacturing Technology. 2009, vol. 44, 7-8, pp. 818–828. doi:
10.1007/s00170-008-1897-3.
Kulak O. A decision support system for fuzzy multi-attribute selection of material handling equipments // Expert Systems with Applications. 2005, vol.
29, no. 2, pp. 310–319. doi: 10.1016/j.eswa.2005.04.004.
Fisher E. L., Farber J. B., Kay M. G. Mathes: An expert system for material
handling equipment selection // Engineering Costs and Production Economics. 1988, vol. 14, no. 4, pp. 297–310. doi: 10.1016/0167-188X(88)900341.
Tuzkaya G., Gülsün B., Kahraman C., Özgen D. An integrated fuzzy multicriteria decision making methodology for material handling equipment selection problem and an application // Expert Systems with Applications.
2010, vol. 37, no. 4, pp. 2853–2863. doi: 10.1016/j.eswa.2009.09.004.
Chakraborty S., Banik D. Design of a material handling equipment selection
model using analytic hierarchy process // The International Journal of Advanced Manufacturing Technology. 2006, vol. 28, 11-12, pp. 1237–1245.
doi: 10.1007/s00170-004-2467-y.
Chan F.T.S. Design of material handling equipment selection system: an
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
integration of expert system with analytic hierarchy process approach // Integrated Manufacturing Systems. 2002, vol. 13, no. 1, pp. 58–68. doi:
10.1108/09576060210411512.
Mirhosseyni S. H. L., Webb P. A Hybrid Fuzzy Knowledge-Based Expert
System and Genetic Algorithm for efficient selection and assignment of Material Handling Equipment // Expert Systems with Applications. 2009, vol.
36, no. 9, pp. 11875–11887. doi: 10.1016/j.eswa.2009.04.014.
Stević Ž., Pamučar D., Vasiljević M., Stojić G., Korica S. Novel Integrated
Multi-Criteria Model for Supplier Selection: Case Study Construction Company // Symmetry. 2017, vol. 9, no. 11, p. 279. doi: 10.3390/sym9110279.
Vasiljevic M., Fazlollahtabar H., Stević Ž., Vesković S. A rough multicriteria
approach for evaluation of the supplier criteria in automotive industry // Decision Making: Applications in Management and Engineering. 2018, vol. 1,
no. 1, pp. 82–96. doi: 10.31181/dmame180182v.
Zavadskas E. K., Stević Ž., TANACKOV I., PRENTKOVSKIS O. A Novel
Multicriteria Approach – Rough Step-Wise Weight Assessment Ratio Analysis Method (R-SWARA) and Its Application in Logistics // Studies in Informatics and Control. 2018, vol. 27, no. 1. doi: 10.24846/v27i1y201810.
Radović D., Stević Ž., Pamučar D., Zavadskas E., Badi I., Antuchevičiene
J., Turskis Z. Measuring Performance in Transportation Companies in Developing Countries: A Novel Rough ARAS Model // Symmetry. 2018, vol.
10, no. 10, p. 434. doi: 10.3390/sym10100434.
Nunić Z. Evaluation and selection of the PVC carpentry manufacturer using
the FUCOM-MABAC model // Operational Research in Engineering Sciences: Theory and Applications. 2019, vol. 1, no. 1, pp. 13–28. doi:
10.31181/oresta19012010113n.
Stanujkić D., Karabašević D. An extension of the WASPAS method for decision-making problems with intuitionistic fuzzy numbers: a case of website
evaluation // Operational Research in Engineering Sciences: Theory and
Applications. 2019, vol. 1, no. 1, pp. 29–39. doi:
10.31181/oresta19012010129s.
Pamučar D., Stević Ž., Sremac S. A New Model for Determining Weight
Coefficients of Criteria in MCDM Models: Full Consistency Method
(FUCOM) // Symmetry. 2018, vol. 10, no. 9, p. 393. doi:
10.3390/sym10090393.
Rezaei J. Best-worst multi-criteria decision-making method // Omega. 2015,
vol. 53, pp. 49–57. doi: 10.1016/j.omega.2014.11.009.
Saaty T. L. The analytic hierarchy process: planning, priority setting, resource allocation. New York, London: McGraw-Hill International Book Co.
1980.
Keshavarz Ghorabaee M., Zavadskas E. K., Olfat L. Multi-Criteria Inventory
Classification Using a New Method of Evaluation Based on Distance from
Average Solution (EDAS) // Informatica. 2015, vol. 26, no. 3, pp. 435–451.
doi: 10.15388/Informatica.2015.57.
Galović J. Sustavi automatski vođenih vozila: Završni Rad [Automatic
Guided Vehicles: Undergraduate thesis]. Zagreb: University of Zagreb.
2015. 80 p.
Gudelj А., Krčum M., Coric М. Modelling and multiobjective optimization for
automated guided vehicles at container terminals // 35th Conference on
Transportation Systems with International Participation Automation in transportation. 2015, Zagreb: KoREMA.
Zavadskas E. K., Turskis Z., Antucheviciene J. Optimization of Weighted
Aggregated Sum Product Assessment // Electronics and Electrical Engineering. 2012, vol. 122, no. 6. doi: 10.5755/J01.EEE.122.6.1810.
MacCrimmon K.R. Decision making among multiple-attribute alternatives: a
survey and consolidated approach. Santa Monica, California: The RAND
Corporation. 1968. 63 p.
Pamučar D., Ćirović G. The selection of transport and handling resources
in logistics centers using Multi-Attributive Border Approximation area Comparison (MABAC) // Expert Systems with Applications. 2015, vol. 42, no. 6,
pp. 3016–3028. doi: 10.1016/j.eswa.2014.11.057.
Zavadskas E. K., Turskis Z. A new additive ratio assessment (ARAS)
method in multicriteria decision‐making // Technological and Economic Development of Economy. 2010, vol. 16, no. 2, pp. 159–172. doi:
10.3846/tede.2010.10.
Received 19/12/2018
Stojčić M., Stević Ž., Nikolić A., Božičković Z. A multi-criteria model for evaluation and selection of AGV’s in a warehouse // Modern
Problems of Russian Transport Complex. 2019, vol.9, no.1, pp. 4-20
20
https://transcience.ru ———————— Современные проблемы транспортного комплекса России. 2019. Т.9. №1