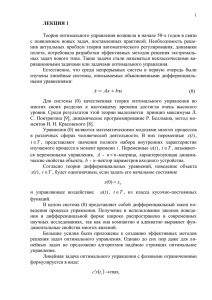
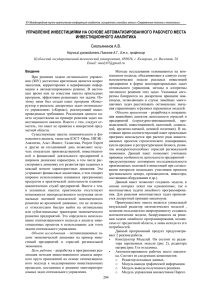
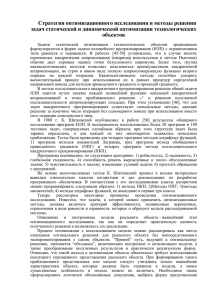
4.1 Модель задачи линейного программирования и универсальный метод ее решения 4.2 Коэффициенты прямых и полных материальных производственных затрат 4.3 Метод динамического программирования. Принцип оптимальности Беллмана. уравнение Беллмана 4.4 Задачи условной и безусловной оптимизации. Методы их решения 4.5 Метод Лагранжа решения оптимизационных задач 4.6 Производственно-технологическая схема производства 5.1 Задача оптимального управления развитием экономики Предлагается оценивать развитие экономики объемом валового продукта X . Чем больше будет валового продукта X , судя по производственно-технологической схеме экономики (см. рис. 2.7), тем больше его пойдет на производственное потребление W , тем больше будет конечного продукта Y , а следовательно, увеличатся и непроизводственное потребление С , и валовые капитальные вложения I . Последнее будет способствовать через чистые капитальные вложения V росту ОПФ и, в итоге, опятьтаки валового продукта X . Воспользуемся приведенными зависимостей валового продукта X . (2.4) соотношениями для представления Валовый продукт X разделяется на производственное потребление W и конечный продукт Y : X W Y . Производственное потребление W выражается через валовый продукт X с помощью коэффициента прямых материальных затрат a : W a X . Тогда X a X Y . Конечный продукт Y разделяется на валовые капитальные вложения I и непроизводственное потребление С : YIC. Подставляя это выражение, получаем: X a X I C . Для упрощения будем рассматривать так называемую открытую модель Леонтьева, в которой не учитываются амортизационные отчисления A, составляющие совместно с чистыми капитальными вложениями V валовые капитальные вложения I: I A V. Тогда валовые капитальные вложения I пропорциональны приросту валового продукта X с коэффициентом приростной фондоемкости b: Подставляя эту зависимость, получаем: После элементарных преобразований дифференциального уравнения: итоговое выражение примет вид В этом уравнении устанавливается связь во времени t между валовым продуктом как функцией времени Xt и непроизводственным потреблением также как функцией времени Ct . Если функция валового продукта Xt устанавливает состояние развития экономики, то тогда функция непроизводственного потребления Ct может служить управлением развития экономики. Исходя из этого, может быть сформулирована постановка задачи оптимального управления развитием экономики. Суть этой задачи сводится к тому, что необходимо выбрать вид функции непроизводственного потребления Ct , устанавливающей его объем в каждый момент времени, которая бы определяла вид функции валового продукта Xt , характеризующей развитие экономики. Указанный выбор должен соответствовать критерию оптимальности управления развитием экономики. Установим промежуток времени (период) управления от начального момента времени t0 по конечный момент времени t1 : Будем характеризовать состояние функцией валового продукта Xt , а управление - функцией непроизводственного потребления Ct Зададим начальное состояние валового продукта X(t0) и пределы возможного управления непроизводственным потреблением: Используя результаты предыдущих рассуждений, опишем связь состояния и управления так называемым уравнением движений В качестве критерия оптимальности состояния за счет использования оптимального управления выберем следующий максимизируемый показатель: По существу это целевая функция задачи оптимизации, аргументами которой служат функции состояния - валового продукта Xt и управления - непроизводственного потребления Ct . Поэтому она называется целевым функционалом. Целевой функционал включает два слагаемых. Первое слагаемое состоит из суммарного (интеграл) дисконтированного непроизводственного потребления за весь период управления: В этом слагаемом дисконтирования . - взвешиваемая функция дисконтирования с коэффициентом Второе слагаемое, называемое терминальным членом целевого функционала, состоит из величины объема выпуска валового продукта X(t1) в конечный момент времени t1 периода управления. Весовые коэффициенты и определяют приоритеты непроизводственного потребления и валового продукта: 1. Целевой функционал выражается числовым значением, которое максимизируется за счет выбора соответствующего вида функции управления - непроизводственного потребления Ct и получаемого при этом с помощью уравнения движения вида функции состояния - валового продукта Xt Таким образом, постановка задачи оптимального управления развитием экономики сводится к установлению периода управления (начального и конечного моментов времени), к определению, что будет являться состоянием (валовый продукт) и управлением (непроизводственное потребление), к заданию начального состояния (объема валового продукта в начальный момент времени периода управления) и пределов изменения управления (минимального и максимального объемов непроизводственного потребления), к аналитическому описанию связи (уравнения движения) состояния (валового продукта) и управления (непроизводственного потребления), и наконец, к выбору показателя оптимальности (целевого функционала). Поставленная задача оптимального управления развитием экономики является математической моделью развития экономики. 5.2 Модель развития экономики: магистральная теория W I A V I Исходя из соотношений поставленной выше задачи оптимального управления развитием экономики, уменьшение значения непроизводственного потребления Ct способствует увеличению значения валового продукта Xt . Однако низкий уровень непроизводственного потребления Ct приводит к снижению прироста валового продукта Xt . Это объясняется, например, недостаточностью подготовки трудовых ресурсов L , которая способствует увеличению коэффициента приростной фондоемкости b , и в итоге, неудовлетворительной эффективности валовых капитальных вложений I . Таким образом, на определенном уровне развития экономики существует некоторая постоянная величина непроизводственного потребления Ct Const , обеспечивающая приемлемый прирост валового продукта Xt , и такое управление развитием экономики в этом периоде времени близко к оптимальному. Полученные соотношения на данном периоде времени называются магистралью. Магистрали предшествует период времени и заканчивается она периодом времени, в которых величина непроизводственного потребления Ct находится на низком уровне, что соответствует оптимальному управлению в эти периоды. Сошлемся на образное представление сути магистрали и магистрального функционирования экономики [10], поясняющее это название. Допустим, что мы находимся в начальном пункте и нам нужно на автомобиле переехать в конечный пункт. Неподалеку от начального и конечного пунктов проходит автотрасса - аналог в данном случае магистрали. Мы оптимальным образом от начального пункта по местной дороге доезжаем до автотрассы, далее въезжаем на магистраль и едем по ней до местной дороги, ближайшей к конечному пункту, после чего съезжаем с магистрали и по местной дороге добираемся до конечного пункта. Эта интерпретация дает интуитивное представление об оптимальном развитии экономики. 5.3 Задача оптимального управления распределением капитальных вложений Вернемся к рассмотрению производственно-технологической схемы экономики (см. рис. 2.7). По этой схеме рост ОПФ Kt происходит за счет валовых капитальных вложений It (инвестиций). Причем часть этих инвестиций представляет собой амортизационные отчисления At : It AtVt где At Kt , - коэффициент амортизации. А чистые капитальные вложения Vt пропорциональны приросту ОПФ Kt : Последнее соотношение учитывает естественную постепенность ввода в действие инвестиций. В совокупности все эти соотношения представляют следующую зависимость: Полученное дифференциальное уравнение описывает связь между ОПФ Kt и инвестициями (валовыми капитальными вложениями) It . Если теперь считать ОПФ Kt состоянием, а валовые капитальные вложения It - управлением, то можно сформулировать постановку задачи оптимального управления распределением валовых капитальных вложений. Пусть интервал времени управления t0 t t1 будет продолжительностью от начального момента времени t0 по конечный момент времени t1 . Состояние описывается функцией ОПФ Kt , а управление - функцией валовых капитальных вложений It . Тогда начальное состояние представляет собой величину K(t0) , а допустимое управление ограничивается минимальной Imin и максимальной Imax величинами возможных валовых капитальных вложений It : В качестве уравнения движения (связь состояния - ОПФ Kt и управления - валовых капитальных вложений It ) будем использовать выведенное выше соотношение: Целевой функционал (целевая функция от функции управления и от функции состояния) представим в виде: где и - весовые коэффициенты, 1 , устанавливающие приоритеты требований, составляющих цель управления. Экономический смысл представленного целевого функционала раскрывается при рассмотрении следующих крайних случаев: - при 1 и 0 целевой функционал отражает минимизацию суммарного (интеграл) расходования инвестиций, т.е. максимально экономного распределения валовых капитальных вложений; - при 0 и 1 целевой функционал (его терминальный член) выражает стремление максимизировать величину ОПФ к концу периода управления. Таким образом, в целевом функционале заложены два противоположных требования, служащих одной и той же цели - оптимальному управлению распределением валовых капитальных вложений It для достижения оптимального состояния ОПФ Kt 5.4 Общий вид задачи оптимального управления Рассмотрев две классические задачи оптимального управления - задачу оптимального управления развитием экономики и задачу оптимального управления распределением валовых капитальных вложений, представим общий вид задачи оптимального управления в экономике. Для этого введем обозначения: xt - состояние экономической системы в момент времени t , ut - управление экономической системой в момент времени t . Тогда в общем виде задача оптимального управления примет вид: - период управления - состояние xt , - управление ut , - начальное состояние x(t0) , - допустимое управление - уравнение движения - целевой функционал Напомним, что в целевом функционале (функции от функций) элемент называется терминальным членом. Решением такой задачи оптимального управления является выбранный вид функции управления ut , для которого на всем периоде управления выполняется условие допустимого управления и по уравнению движения определяется вид функции состояния xt . Тогда оптимальным решением этой задачи будут такие функции управления u*t и состояния x*t , которые являются решением и обеспечивают заданное экстремальное ( max или min ) значение целевого функционала. 5.5 Метод решения задачи оптимального управления Определив выше, что является решением задачи оптимального управления, укажем способ нахождения оптимальной траектории ut (оптимального управления), приводящей к оптимальной траектории xt (оптимальному состоянию). Для этого воспользуемся методом множителей Лагранжа, а затем ниже рассмотрим принцип максимума Понтрягина как необходимое условие, позволяющее выявить неоптимальные траектории. В совокупности комплексным методом решения задачи оптимального управления является так называемый метод Лагранжа-Понтрягина. Рассматривая общий вид задачи оптимального управления, представим уравнение движения в однородном виде Тогда задачу оптимального управления, являющуюся задачей условной оптимизации, можно с помощью метода множителей Лагранжа представить задачей безусловной оптимизации. Для чего введем функцию множителя Лагранжа t и составим функцию Лагранжа из целевого функционала задачи оптимального управления и ее однородного уравнения движения: Оптимальным решением уже такой задачи, кстати, совпадающим с оптимальным решением исходной задачи оптимального управления, является седловая точка , для которой выполняется неравенство: Нахождение оптимального управления ut гарантирует нахождение оптимального состояния xt по уравнению движения. Поэтому ниже рассмотрим условие нахождения оптимального управления ut. 5.6 Принцип максимума Понтрягина Необходимые условия для решения задачи оптимального управления (3.5) дает принцип максимума Понтрягина [7]. Согласно этому принципу седловая точка, точнее, траектория, определяется как решение неравенства: Если - седловая точка, то ut - оптимальное управление, т.е. решение рассматриваемой задачи оптимального управления. Это подтверждается рассмотрением неравенств правого и левого. Правое неравенство: Оно всегда выполняется, т.е. выполняется при любом множителе Лагранжа (t) и t , т.к. на оптимальной траектории выполняется уравнение движения: Следовательно: . Рассмотрим левое неравенство: Из него следует: Поэтому для всех управлений ut , для которых выполняется уравнение движения, выполняется также: т.е. действительно u*t - оптимальное управление (решение) задачи оптимального управления. Таким образом, если - седловая точка, то - оптимальное решение задачи оптимального управления. Поэтому необходимые условия существования седловой точки являются одновременно и необходимыми условиями максимума задачи оптимального управления. Принцип максимума дает лишь необходимые условия оптимальности. Действительно, оптимальная траектория состоит из некоторых участков управляющих траекторий, определенных по этому принципу [7]. 5.7 Синтез оптимального управления Решение поставленной задачи оптимального управления рассматривалось при заданных начальных условиях, в частности, для определенного периода управления: Однако можно потребовать решить задачу оптимального управления для любых начальных условий - в общем случае. Такое общее решение можно будет конкретизировать для любого заданного периода управления. Таким образом, указываются два вида управления: - управление по разомкнутому контуру; - управление по замкнутому контуру (с обратной связью). Оптимальное управление ut по разомкнутому контуру полностью определяется в начальный момент времени t0 , а фазовая траектория оптимального состояния x*t отыскивается по уравнению движения при фиксированных начальных условиях. Оптимальное управление по замкнутому контуру (с обратной связью) определяется как функция текущих фазовых координат состояния xt и времени t , т.е. решение принимается не заранее, а по мере получения информации о текущих фазовых координатах. Задача определения оптимального управления по замкнутому контуру (с обратной связью) называется задачей синтеза. Очевидно, поиск синтеза оптимального управления значительно более трудоемкая процедура по сравнению с решением ut обычной задачи оптимального управления. С математической точки зрения отыскание синтеза оптимального управления сводится к решению нелинейного дифференциального уравнения с частными производными, называемого уравнением Гамильтона-Якоби-Беллмана. 5.8 Построение и расчет параметров сетевого графика комплекса работ Целенаправленную экономическую деятельность можно моделировать с помощью сетевого графика. Рассмотрим определения, связанные с этим понятием. Наглядно граф можно представить как некоторое множество вершин и множество ребер, соединяющих все или некоторые из этих вершин. Если на ребре указано направление связи между вершинами, то оно называется дугой. Если все соединения в графе изображаются дугами, то граф называется ориентированным, или орграфом. Последовательность дуг, в которой конец каждой предыдущей дуги совпадает с началом следующей, называется путем в орграфе. Путь, у которого начальная вершина совпадает с конечной, называется контуром. Контур с одной вершиной - петля. Вершина, из которой дуги только выходят, но не входят, называется истоком. Вершина, в которую дуги только входят, но не выходят, называется стоком. Любой путь от истока к стоку называется полным. Если дугам (ребрам) графа сопоставлены какие-то числовые характеристики, то граф называется взвешенным, а числовые характеристики – весами Вершина xi ("предок") предшествует в графе вершине xj ("потомок"), если существует путь из xi в xj . Граф является упорядоченным, если в нем порядковый номер "предка" всегда меньше порядкового номера "потомка". Графический способ упорядочения графа реализуется по алгоритму Фалкерсона: 1-ый шаг) выделяем вершины, не имеющие "предков", и последовательно нумеруем их в произвольном порядке; 2-ой шаг) мысленно вычеркиваем из графа все вершины, имеющие номера, и дуги, из них выходящие; 3-ий шаг) в получившемся графе повторяем процедуры 1-ого и 2-ого шагов до тех пор, пока все вершины не будут пронумерованы. Граф называется связанным, если две любые его вершины можно соединить путем, в котором не учитывается ориентация дуг. Сетевой график - это связанный упорядоченный взвешенный орграф без контуров (петель). На изображении с помощью сетевого графика основано сетевое планирование и управление (СПУ). Основными понятиями СПУ являются работа и событие. Под работой понимаются действия, связанные с затратами ресурсов и приводящие к определенным результатам. Работы обозначаются на сетевом графике дугами. Под событием понимают результат завершения одной или нескольких работ. События обозначаются на сетевом графике вершинами. Подготовка исходных данных для построения сетевого графика включает: - определение начального и конечного событий; - составление перечня всех событий, следующих за начальным и без которых не может произойти конечное событие; - составление списка работ, соединяющих намеченные события; - определение продолжительности выполнения каждой работы. При построении сетевого графика для СПУ должны учитываться следующие четыре правила: - график должен иметь только одно начальное событие (исток) и только одно конечное событие (сток); - ни одно событие не может произойти до тех пор, пока не будут закончены все входящие в него работы; - ни одна работа, выходящая из какого-либо события, не может начаться до тех пор, пока не произойдет данное событие; - график должен быть упорядоченным. 2.2. Расчет параметров сетевого графика Основными параметрами сетевого графика являются: - критический путь; - резервы времени событий; - резервы времени работ. Критическим называется наиболее продолжительный из полных путей. Критический путь определяет достаточно необходимое время выполнения всех работ, называемое критическим сроком. Работы и события, лежащие на критическом пути, называются критическими. Пример Определение критического пути в сетевом графике: Полные пути и их продолжительности: 1) 1 - 2 - 3 - 4 - 5 2+3+5+6=16; 2) 1 - 2 - 4 - 5 2+9+6=17; критический срок (путь) 3) 1 - 3 - 4 - 5 4+5+6=15. 5.9 Многокритериальные задачи и их оптимальное решение 5.10 Оптимальная чистая стратегия выбора варианта действий Оптимальной стратегией называется такая стратегия игрока I, при которой он не уменьшит своего выигрыша при любом выборе стратегии игроком II, и такая стратегия игрока II, при которой он не увеличит своего проигрыша при любом выборе стратегии игроком I. Выбирая в качестве хода i -ую строку платежной матрицы, игрок I обеспечивает себе выигрыш не менее величины в наихудшем случае, когда игрок II будет стараться минимизировать эту величину. Поэтому игрок I выберет такую i -ую строку, которая обеспечит ему максимальный выигрыш: Игрок II рассуждает аналогично и может наверняка обеспечить себе минимальный проигрыш: Всегда справедливо неравенство: Оптимальные стратегии 0 i и 0 j называются чистыми, если для них выполняются равенства: Величину Величину называют нижней ценой игры. называют верхней ценой игры. Величину v (мю) называют чистой ценой игры, если α β v . Оптимальные чистые стратегии i0 и j0 образуют седловую точку i0;j0) платежной матрицы Am,n . Для седловой точки выполняются условия: т.е. элемент является наименьшим в строке и наибольшим в столбце. Таким образом, если платежная матрица имеет седловую точку, то можно найти оптимальные чистые стратегии игроков. Чистая стратегия i0 игрока I может быть представлена упорядоченным набором m чисел (вектором), в котором все числа равны нулю, кроме числа, стоящего на i0 - ом месте, которое равно единице. Чистая стратегия j0 игрока II может быть представлена упорядоченным набором n чисел (вектором), в котором все числа равны нулю, кроме числа, стоящего на j0 - ом месте, которое равно единице. Пример Рассмотрим игру 3 3 , заданную платежной матрицей: Выбирая в качестве хода какую-нибудь строку платежной матрицы, игрок I обеспечивает себе выигрыш в наихудшем случае не менее величины в столбце, обозначенном "min" : Поэтому игрок I выберет 2-ую строку платежной матрицы, обеспечивающую ему максимальный выигрыш независимо от хода игрока II, который будет стараться минимизировать эту величину: Игрок II рассуждает аналогично и выберет в качестве хода 1-ый столбец: Таким образом, имеется седловая точка платежной матрицы: соответствующая оптимальной чистой стратегии 0 ,1, 0 для игрока I и 1, 0 , 0 для игрока II, при которой игрок I не уменьшит своего выигрыша при любом изменении стратегии игроком II и игрок II не увеличит своего проигрыша при любом изменении стратегии игроком I. 5.11 Оптимальная смешанная стратегия выбора варианта действий 5.12 Нахождение оптимальной смешанной стратеги и . (ДОПОЛНИТЕЛЬНО РЕШЕНИЕ ИГР MxN)