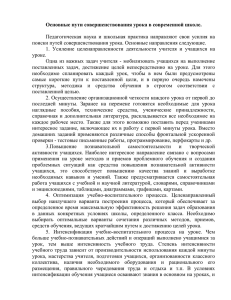
1. Функциональная организация локальных систем управления локальные системы контроля, регулирования и управления (ЛСКРиУ) системы централизованного контроля, регулирования и управления (СЦКРиУ) системы децентрализованного или распределенного управления 2. Классифицирующие признаки локальных систем управления локальные системы контроля, регулирования и управления (ЛСКРиУ) системы централизованного контроля, регулирования и управления (СЦКРиУ) системы децентрализованного или распределенного управления В зависимости от решаемых задач АСУ ТП может иметь различную структуру; выделяют 3 класса АСУ ТП: локальные, централизованные и распределенные системы управления. Локальная система управления используется для управления технологически независимым объектом с компактно расположенным оборудованием, и несложными задачами управления. Примеры локальных систем: системы стабилизации, следящие, программного управления. Основные элементы локальной системы: ТОЭ, датчики, исполнительное устройство и локальный регулятор. В системе обычно предусматриваются элементы ручного управления и связи с оператором. Рис.1 В зависимости от реализации регулятора локальные системы могут быть как аналоговыми так и цифровыми. 1 Централизованная система управления используется для управления сосредоточенным объектом со сложными или разнообразными функциями управления или большим количеством сигналов «вход-выход». В системе есть два уровня: на нижнем уровне находятся объекты управления с датчиками и исполнительными устройствами на верхнем управляющая вычислительная машина (УВМ) и устройство сопряжения с объектом (УСО). УСО преобразует различные по виду сигналы от датчиков (входные сигналы), в цифровой код в формате, определяемом конкретной УВМ. Сформированные УВМ в виде цифрового кода сигналы управляющих воздействий для исполнительных устройств (выходные сигналы) УСО преобразует к одному из стандартных видов. Для контроля над процессом предусмотрен пульт связи с оператором. Все процессы обработки сигналов датчиков и формирование управляющих сигналов для всех контуров управления последовательно исполняет одна и та же УВМ. Она также обеспечивает интерфейс с оператором. Централизованная система имеет два основных недостатка: малая надежность и низкое быстродействие. Система становиться неработоспособной при отказе УВМ или УСО. При большом количестве датчиков и контуров управления существенно увеличивается время основного цикла управляющей программы УВМ. Для устранения этих недостатков применяют следующие решения. Для повышения надежности осуществляется: а) Дублирование основных элементов системы управления: УВМ и УСО; б) Применение супервизорной структуры. Для повышения быстродействия передают часть функций управления на более низкий уровень: а) Применение супервизорной структуры. б) Переход к распределенной многоуровневой системе управления. Рис.2. В супервизорной структуре с верхнего уровня на нижний передаются в цифровом виде значения уставок для регулятора и команды для локального контроллера, а с нижнего уровня на верхний параметры объекта, также в цифровом виде. Непосредственное управление в контуре выполняет локальный контроллер. 2 Распределённая система управления (англ. Distributed Control System, DCS) — система управления технологическим процессом, отличающаяся построением распределённой системы ввода-вывода и децентрализацией обработки данных. Основным отличием РСУ от обычной SCADA-системы является глубокая интеграция средств разработки кода для уровня визуализации и уровня управления. Например, изменение в алгоритме управления процессом автоматически дублируется в программе отображения этого процесса. В РСУ значительную роль играют контуры регулирования (ПИД-регуляторы). Сферы применения РСУ многочисленны: 1. Химия и нефтехимия. 2. Нефтепереработка и нефтедобыча. 3. Газодобыча и газопереработка. 4. Металлургия. 5. Пищевая промышленность: молочная, сахарная, пивная. 6. Энергоснабжение и т. д. Требования к современной РСУ: 1. Отказоустойчивость и безопасность. 2. Простота разработки и конфигурирования. 3. Поддержка территориально распределённой архитектуры. 4. Единая конфигурационная база данных. 5. Развитый человеко-машинный интерфейс. Классифицирующие признаки ЛСУ функциональная полнота и конструктивная завершенность; территориальная сосредоточенность; 3 условная информационная мощность; наличие интерфейса для интеграции ЛСУ в системы более высокого ранга. Типовые функциональные структуры ЛСУ системы контроля, регулирования и управления промышленной автоматики, объектами которых служат установки, аппараты технологических процессов произвольной природы; регулируемые (управляемые) электроприводы для приведения в действие рабочих (исполнительных) органов технологических объектов; следящие системы для воспроизведения перемещений технических объектов по произвольным ограниченным траекториям и со скоростью в широком диапазоне ее изменения. 3. Назначение локальных систем управления Функциональное назначение ЛСУ Измерение — нахождение значения физических, механических, химических и прочих параметров автоматизируемого объекта управления опытным путем с помощью технических средств. Контроль — установление соответствия между состоянием или свойством объекта и заданной для этого объекта нормой, определяющей качественно возможные различные состояния или свойства объекта. Регулирование — воспроизведение режимных параметров состояния объекта на своих выходах в соответствии с заданной функцией. 4 Управление — изменение состояния объекта с целью достижения желаемого качества его функционирования в эксплуатационных условиях в течение длительного срока работы. Теплоэнергетические величины Электроэнергетические величины Сила тока, I [а] Механические величины Длина, L [м] Физико-химические величины Объемная концентрация вещества В, φ , Напряжение постоянно-го и переменного тока, U [в] Полная (активная) мощность, W [вт] Масса, m [кг] Массовая концентрация вещества В, w Время, t [c] Количество вещества, N [моль] Круговая частота, ω [рад/с] Плоский угол, α, φ, υ [рад] Влажность веществ и Уровень, H [м] Частота, f [гц] Объемный расход жидкости, газа, V Магнитная индукция, В [тл] Угловая скорость, ω [рад/с] Момент сил, М [н∙м] 0 Температура, Т [ С, град.] В 2 Давление, р [н/м ] Перепад давления, Δр 2 [н/м ] 2 Вакуум, р [н/м ] В 3 материалов, А [г/м ] Состав газовых смесей Состав жидкостей и твердых тел 3 [м /с] Массовый расход, M [кг/с] Электрическая проводимость, S [сим] Тепловой поток, Ф [вт] Электричеcкое сопротивление, R [ом] Момент инерции, J 2 [кг∙м ] Динамическая вязкость, μ 2 [н∙с/м ] 4. Типовая структура распределённых систем управления Типовые функциональные структуры ЛСУ системы контроля, регулирования и управления промышленной автоматики, объектами которых служат установки, аппараты технологических процессов произвольной природы; регулируемые (управляемые) электроприводы для приведения в действие рабочих (исполнительных) органов технологических объектов; следящие системы для воспроизведения перемещений технических объектов по произвольным ограниченным траекториям и со скоростью в широком диапазоне ее изменения. Типовая функциональная схема ЛСУ промышленного применения 5 Типовая функциональная схема регулируемого электропривода (РЭП) Типовая функциональная схема следящей системы 6 Дистанционное измерение (передача) значения углового перемещения αз с помощью пары сельсин 7 Системы централизованные контроля, регулирования и управления (СЦКРиУ) Типовая АСУ ТП с супервизорным управлением 8 SCADA-системы 9 Типовые структуры распределенных систем управления 10 Типовая структура распределенных систем управления (окончание) 5. Разработка систем автоматизации на основе Foundation Fieldbus 6. Разработка систем автоматизации на основе PROFIBUS 7. Разработка систем автоматизации на основе HART 11 8. Средства разработки программного обеспечения систем контроля и управления 12