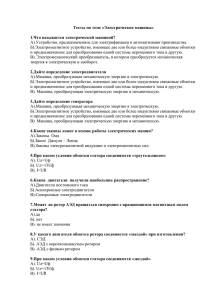
Содержание СОДЕРЖАНИЕ ........................................................................................................... 3 ВВЕДЕНИЕ .................................................................................................................. 4 1 ОПРЕДЕЛЕНИЕ ГЛАВНЫХ РАЗМЕРОВ ЭЛЕКТРОДВИГАТЕЛЯ ................. 5 2 РАСЧЕТ ОБМОТКИ, ПАЗА И ЯРМА СТАТОРА ............................................... 7 3 РАСЧЕТ ОБМОТКИ, ПАЗА И ЯРМА РОТОРА ................................................ 14 4 РАСЧЕТ МАГНИТНОЙ ЦЕПИ АСИНХРОННОЙ МАШИНЫ ....................... 17 5 ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ АСИНХРОННОЙ МАШИНЫ ДЛЯ РАБОЧЕГО РЕЖИМА .............................................................................................. 20 6 РАСЧЕТ ПОСТОЯННЫХ ПОТЕРЬ МОЩНОСТИ ........................................... 26 7 РАБОЧИЕ ХАРАКТЕРИСТИКИ АД ................................................................... 31 8 ПУСКОВЫЕ ХАРАКТЕРИСТИКИ АД .............................................................. 33 9 ТЕПЛОВОЙ РАСЧЕТЫ ........................................................................................ 38 ЗАКЛЮЧЕНИЕ ......................................................................................................... 43 СПИСОК ЛИТЕРАТУРЫ......................................................................................... 44 3 Введение Целью данного курсового проектирования является расширение и закрепление знаний по курсу “ Электрические машины”, овладение современными методами расчёта и конструирования электрических машин (в данном курсовом проекте – двигателя серии 4А200L2У3), приобретение навыков пользования справочной литературой, что потребуется в процессе работы на производстве при пересчёте обмоток электрических машин на другое напряжение или при ремонте машин. Асинхронные двигатели являются основными преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов, используемых во всех отраслях народного хозяйства. Уже в настоящее время асинхронные двигатели потребляют более 40 % вырабатываемой в стране электроэнергии, на их изготовление расходуется большое количество дефицитных материалов: обмоточной меди, изоляции, электротехнической стали и других, а затраты на обслуживание и ремонт асинхронных двигателей в эксплуатации составляют более 5 % затрат на ремонт и обслуживание всего установленного оборудования. Поэтому создание серий высокоэкономичных и надёжных асинхронных двигателей является важнейшей народнохозяйственной задачей, а правильный выбор двигателей, их эксплуатация и высококачественный ремонт играют первоочередную роль в экономии материальных и трудовых ресурсов в нашей стране [1]. 4 1 Определение главных размеров электродвигателя Принимаем высоту оси вращения двигателя h=200 мм. Принимаем наружный диаметр сердечника статора DН1=322 мм. Внутренний диаметр сердечника статора: D1 0,61 D H1 4 0,61 322 4 192,42 мм Принимаем коэффициент k H 0,98 . Принимаем предварительное значение КПД η 0,91 Расчетная мощность P k н P2 0,98 22 10 3 29,61 Вт ' cos 0,91 0,8 Принимаем предварительную линейную нагрузку: А=350*1,1=385 А/см. Принимаем предварительную индукцию в зазоре [1]: B 0,77 0,96 0,74 Тл . Принимаем предварительное значение обмоточного коэффициента: 1 0,79 . kОБ Расчетная длина сердечника статора l1 8, 62 107 P 8, 62 107 29610 307,9 мм 1 192, 422 750 385 0, 74 0, 79 D12 n1 A1 Bδ kОБ Принимаем конструктивную длину сердечника статора: l1 105 мм . 5 Отношение длины сердечника к его диаметру [1] (1.5…..2): λ l1 307.9 1, 6 D1 192, 42 Условие выполняется. Принимаем марку стали – 2013. Принимаем толщину листа 0,5 мм. Принимаем вид изолирования листов – оксидирование [1]. Принимаем коэффициент заполнения стали kC=0,97. Количество пазов сердечника статора z1 2 p m1 q1 8 1 3 3 72 Принимаем марку стали – 2013. Принимаем толщину листа 0,5 мм. Принимаем вид изолирования листов – оксидирование. Принимаем коэффициент заполнения стали kC=0,97. Принимаем сердечник ротора без скоса пазов. Принимаем воздушный зазор между статором и ротором 1 мм . Наружный диаметр сердечника ротора: D H 2 D1 2 192 2 1 190 мм Внутренний диаметр листов ротора: D 2 0,23 D H1 0,23 322 74 мм Принимаем длину сердечника ротора l 2 равную длине сердечника статора, l 2 l1 105 мм . Принимаем количество пазов сердечника ротора z 2 22 . 6 2 Расчет обмотки, паза и ярма статора Принимаем двухслойную обмотку с укороченным шагом, укладываемую в трапецеидальные полузакрытые пазы [2]. Коэффициент распределения 0,5 k Р1 q1 sin где 2 0,5 0,9567 12 3 sin 2 600 60 =20 q1 3 Принимаем относительный шаг обмотки 1 0,6 . Шаг полученной обмотки yП1 1 z1 2p 0, 6 72 5, 4 8 Коэффициент укорочения k У1 sin(1 90 0 ) sin( 0,6 90 0 ) 0,809 Обмоточный коэффициент k ОБ1 k Р1k У1 0,9567 0,809 0,774 Предварительное значение магнитного потока Ф B D1 l1 10-6 0, 74 192, 42 105 106 1, 495 102 Вб p 4 Предварительное количество витков в обмотке фазы w1 k Н U1 0,98 220 84 f1 50 2 222 kОБ1 ( ) Ф 222 0, 774 1, 495 10 50 50 Предварительное количество эффективных проводников в пазу 7 N П 1 w1 а1 84 1 4 pq1 45 где a1 1- число параллельных ветвей обмотки статора. Принимаем N П1 4 Уточненное количество витков в обмотке фазы w1 N П 1 p q1 4 4 5 90 а1 1 Уточненное значение магнитного потока w1 1, 495 102 84 Ф Ф 1, 477 102 Вб w1 90 Уточненное значение индукции в воздушном зазоре Bδ B w 1 0,74 84 0,731Тл w1 85 Предварительное значение номинального фазного тока I1 P2 103 22 103 40, 7 А 3 U1 cos 3 380 0,91 0,8 Уточненная линейная нагрузка статора A1 10 N П1 z1 I1 10 4 72 40, 7 343,5 А / см π D1 a1 3,14 192, 42 1 Отклонение полученной линейной нагрузки от предварительно принятой A A1 A1 385 343,5 100 100 9,8 % A1 385 Отклонение не превышает допустимое значение, равное 10%. Принимаем среднее значение магнитной индукции в спинке статора BС1 1,68 Тл . 8 Зубцовое деление по внутреннему диаметру статора [2]: t1 D1 z1 3,14 192, 42 20,14 мм 72 Принимаем среднее значение магнитной индукции в зубцах статора В З1 1,8 Тл . Обмотка статора и паз изображены на рисунке 1. Рисунок 1 – Трапецеидальный полузакрытый паз статора Ширина зубца b З1 t 1 Bδ 20,14 0,731 8,432 мм k c B З1 0,97 1,8 Принимаем bз1=7 мм [1]. Высота спинки статора Ф 10 6 1,477 10 2 10 6 h С1 43,16 мм 2k c l1 BС1 2 0,97 105 1,68 Принимаем h С1 40 мм . Высота паза 9 h П1 D H1 D1 322 192,42 h C1 40 24,8 мм 2 2 Большая ширина паза b1 ( D1 2hП1 ) z1 bЗ1 3,14 (192, 42 2 24,8) 7 18,33 мм 72 Предварительное значение ширины шлица 1 0,3 h 0,3 200 4 мм bШ Меньшая ширина паза b2 ( D1 2hШ 1 bШ 1 ) z1 bЗ1 3,14 (192, 42 2 0,5 4) 72 7 14,33 мм z1 72 3,14 где hШ1 0,5 мм - высота шлица. Проверка правильности определения b1 и b2 исходя из требования bз1 const z1 (b1 b2 ) π (b2 bШ1 ) 2π (hП1 hШ1 ) 0; 72 (18,33 14,33) 3,14 (14,33 4) 2 3,14 (24,8 0,5) 0,105 0 Площадь поперечного сечения паза в штампе b1 b 2 b b Ш1 ( h П1 h Ш 1 2 ) 2 2 18,33 14,33 14,33 4 (24,8 0,5 ) 312,3 мм 2 2 2 S П1 Площадь поперечного сечения паза в свету b1 b 2 b b Ш1 b С ) ( h П1 h Ш 1 2 hc ) 2 2 18,33 14,33 14,33 4 ( 0,2) (24,8 0,5 0,2) 305,26 мм 2 2 2 SП1 ( где b С h C 0,2 мм - припуски на сборку сердечников статора и ротора соответственно по ширине и по высоте. 10 Площадь поперечного сечения корпусной изоляции SИ b и1 (2h П1 b1 b 2 ) 0,4 (2 24,8 18,33 14,33) 32,9 мм 2 где b и1 0,4 мм – среднее значение односторонней толщины корпусной изоляции. Площадь поперечного сечения прокладок между верхней и нижней катушками в пазу, на дне паза и под клином SПР 0,5 b1 0,75 b 2 0,5 18,33 0,75 14,33 19,91 мм 2 Площадь поперечного сечения паза, занимаемая обмоткой SП 1 SП1 SИ SПР 305,26 32,9 19,91 252,45 мм 2 Произведение c(d ) 2 с(d) 2 k П SП 1 0,75 252,45 11,14 мм 2 N П1 17 где kП 0,75 - допускаемый коэффициент заполнения паза для ручной укладки. Принимаем количество элементарных проводов в эффективном c 4 . Диаметр элементарного изолированного провода d k П SП 1 0,75 252,45 1,6686 мм N П1 с 17 4 Диаметр элементарного изолированного провода не должен превышать 1,71 мм при ручной укладке и 1,33 мм при машинной. Данное условие выполняется [3]. Принимаем диаметры элементарного изолированного и неизолированного (d) провода 11 d 1,56 мм d 1,645 Принимаем площадь поперечного сечения провода S 1,911 мм 2 . Уточненный коэффициент заполнения паза N П1 c(d) 2 17 4 1,56 2 kП 0,6555 SП 1 252,45 Значение уточненного коэффициента заполнения паза удовлетворяет условиям ручной укладки и машинной (при машинной укладке допускаемый k П 0,72 ). Уточненная ширина шлица bШ 1 d 2b И 0,4 1,645 2 0,4 0,4 2,845 мм 1 bШ 1. Принимаем b Ш1 bШ1 4 мм , так как bШ Плотность тока в обмотке статора J1 I1 40,7 5,324 А / мм 2 c S a 1 4 1,911 1 Произведение линейной нагрузки на плотность тока A1J1 343,5 5,324 1829 А 2 /(см мм 2 ) Принимаем допустимое значение произведения линейной нагрузки на плотность тока A1J1 2100 А 2 /(см мм 2 ) . Расчетное произведение линейной нагрузки на плотность тока не превышает допустимое значение. Среднее зубцовое деление статора tCР1 π ( D1 hП1 ) 3,14 (192 24, 6) 22, 7 мм z1 72 12 Средняя ширина катушки обмотки статора b СР1 t СР1 y П1 22,7 9 204,3 мм Средняя длина одной лобовой части катушки l Л1 (1,16 0,14p) b СР1 15 (1,16 0,14 1) 204,3 15 280,6 мм Средняя длина витка обмотки l СР1 2 (l1 l Л1 ) 2 (105 280,6) 771,2 мм Длина вылета лобовой части обмотки l В1 (0,12 0,15p) b СР1 10 (0,12 0,15 1) 204,3 10 65,16 мм 13 3 Расчет обмотки, паза и ярма ротора Принимаем пазы ротора овальной формы, закрытые. Пазы ротора изображены на рисунке 2 [3]. Рисунок 2 – Овальные закрытые пазы ротора Принимаем высоту паза h П 2 35 мм . Расчетная высота спинки ротора 2 2 h С 2 0,58 D H 2 h П 2 d K 2 0,58 190 35 0 75,2 мм 3 3 где d K 2 0 - диаметр круглых аксиальных вентиляционных каналов в сердечнике ротора, в проектируемом двигателе они не предусматриваются [2]. Магнитная индукция в спинке ротора BС 2 Ф 10 6 1,477 10 2 10 6 0,9642 Тл 2 k С l 2 h С 2 2 0,97 105 75,2 Зубцовое деление по наружному диаметру ротора t2 D H 2 3,14 190 27мм z2 22 Принимаем магнитную индукцию в зубцах ротора B З 2 1,79 Тл 14 Ширина зубца b З2 t 2 B 27 0,731 11,4 мм B З 2 k С 1,79 0,97 Меньший радиус паза r2 π (D H 2 2h П 2 ) z 2 b З 2 3,14 (190 2 35) 22 11,4 3,34 мм 2 (z 2 ) 2 (22 3,14) Больший радиус паза r1 π ( D H 2 2 h Ш 2 2h 2 ) z 2 b З 2 2 (z 2 π) 3,14 (190 2 0,7 2 0,3) 22 11,4 6,75 мм 2 (22 3,14) где hШ 2 0,7 мм - высота шлица; bШ 2 1,5 мм - ширина шлица; h 2 0,3 для полузакрытого паза. Расстояние между центрами радиусов h 1 h П 2 h Ш 2 h 2 r1 r2 35 0,7 0,3 6,75 3,34 23,91 мм Проверка правильности определения r1 и r2 исходя из условия bЗ 2 const π h 1 z 2 (r1 r2 ) 0; 3,14 23,91 22 (6,75 3,34) 0,0574 0 Площадь поперечного сечения стержня, равная площади поперечного сечения паза в штампе SСТ SП 2 0,5 (r12 r22 ) (r1 r2 ) h 1 0,5 3,14 (6,75 2 3,34 2 ) (6,75 3,34) 23,9 330,2 мм 2 Принимаем литую клетку. Короткозамыкающие кольца ротора изображены на рисунке 3. 15 Рисунок 3 – Короткозамыкающие кольца ротора Поперечное сечение кольца SКЛ (0,35 0,45) z 2 SСТ /(2p) 0,4 22 330,2 /(2 1) 1453 мм 2 Высота кольца h КЛ (1,1 1,2) h П 2 1,2 35 42 мм Длина кольца l КЛ SКЛ 1453 35 мм h КЛ 42 Средний диаметр кольца D КЛ .СР D H 2 h КЛ 190 42 148 мм Вылет лобовой части обмотки lв2= kл* lл2+ lкл=0,9*50+34,6=80 мм 16 4 Расчет магнитной цепи асинхронной машины Коэффициент, учитывающий увеличение магнитного сопротивления воздушного зазора вследствие зубчатого строения статора k 1 1 b Ш1 4 1 1,09756 5 t1 5 1 20 20 4 t 1 b Ш1 4 b Ш1 Коэффициент, учитывающий увеличение магнитного сопротивления воздушного зазора вследствие зубчатости строения ротора [1]: k δ2 1 bШ2 t 2 bШ2 Принимаем 5 δ t2 bШ2 1 коэффициент, 1,5 1,013 5 1 27 27 1,5 1,5 учитывающий уменьшение магнитного сопротивления воздушного зазора при наличии радиальных каналов на статоре или роторе kК 1 . Общий коэффициент воздушного зазора k k 1 k 2 k К 1,09756 1,013 1 1,11183 МДС для воздушного зазора F 0,8 k B 103 0,8 1 1,11183 0,731 103 650,2 А Так как В З1 1,8Тл , принимаем напряженность магнитного поля H З1 15,2 А / см Принимаем среднюю длину пути магнитного потока L З1 h П1 24,8 мм МДС для зубцов FЗ1 0,1 H З1 L З1 0,1 15,2 24,8 37,7 А 17 Так как B З 2 1,79 Тл 1,8 Тл , принимаем напряженность магнитного поля H З 2 14,8 А / см . Средняя длина пути магнитного потока L З 2 h П 2 0,2 r2 35 0,2 3,34 34,33 мм МДС для зубцов FЗ 2 0,1 H З 2 L З 2 0,1 14,8 34,33 50,8 А Принимаем напряженность магнитного поля H С1 1,88 А / см . Средняя длина пути магнитного потока L С1 (D H1 h С1 ) 3,14 (322 40) 221,4 мм 4р 4 1 МДС для спинки статора FС1 0,1 H С1 L С1 0,1 1,88 221,4 41,6 А Принимаем напряженность магнитного поля H С 2 1,71 А / см Средняя длина пути магнитного потока L С 2 h C 2 2 d k 2 / 3 75,2 2 0 / 3 75,2 мм МДС для спинки ротора FС 2 0,1 H С 2 L С 2 0,1 1,71 75,2 12,86 А Суммарная МДС магнитной цепи на один полюс F Fδ FЗ1 FЗ 2 FС1 FС 2 650,2 37,7 50,8 41,6 12,86 793,2 А Коэффициент насыщения магнитной цепи k НАС F 793,2 1,22 F 650,2 18 Намагничивающий ток IM 2,22 F p 2,22 793,2 1 8,92 А m1 w 1 k ОБ1 3 85 0,774 Намагничивающий ток в относительных единицах IМ * I M 8,92 0,195 I1 45,8 ЭДС холостого хода E k H U1 0,98 220 213 В Главное индуктивное сопротивление [2]: xM E 213 24 Ом I M 8,92 Главное индуктивное сопротивление в относительных единицах xM * x M I1 24 45,8 5 U1 220 19 5 Определение параметров асинхронной машины для рабочего режима Активное сопротивление обмотки фазы при 20 0С r1 w 1 l СР1 85 771,2 0,15 Ом 3 ρ M 20 a 1 c S 10 57 1 4 1,911 10 3 где ρ M 20 57 См / мкм -удельная электрическая проводимость меди при 200С [1]. Активное сопротивление обмотки фазы при 20 0С в относительных единицах r1* r1 I1 0,15 40, 7 0, 02775 U1 380 Проверка правильности определения r1 r1* D1 ( A1 J1 ) lСР1 114 10 m1 U1 I1 4 * 3,14 192 1829 771, 2 0, 02777 114 104 3 380 40, 7 Принимаем размеры паза статора h K1 1 мм ; h 2 0,6 мм ; h 3 h 4 0,4; Высота h 1 h п1 h ш1 h k1 h 2 h 4 24,8 0,5 1 0,6 0,4 22,3 мм Коэффициенты, учитывающие укорочение шага k β1 0,2 0,85 1 0,2 0,85 0,6 0,71 k '' 1 1,1 1 1,1 0,6 0,66 Коэффициент проводимости рассеяния 20 3h k1 h1 h h k β1 ш1 2 k β' 1 3b 2 b 2 2 b ш1 b ш1 b 2 22,3 3 1 0,5 0,6 0,71 0,66 0,567 3 14,33 14,33 2 4 4 14,33 λ п1 Принимаем коэффициент дифференциального рассеяния статора k Д1 0,0043 . Коэффициент, учитывающий влияние открытия пазов статора на проводимость дифференциального рассеяния 0,033 b ш2 1 0,033 4 2 k ш1 1 1 0,974 t 1 min 20,14 1 Принимаем коэффициент, учитывающий демпфирующую реакцию токов, наведенных в обмотке короткозамкнутого ротора высшими гармониками поля статора k р1 0,695 . Коэффициент проводимости дифференциального рассеяния д1 0,9t min (q1 k об1 ) 2 k р1k ш1k д1 k 0,9 20,14 (5 0,774) 2 0,695 0,974 0,0043 0,7107 1 1,11183 Полюсное деление D1 3,14 192 301,44мм 2p 2 1 Коэффициент проводимости рассеяния лобовых частей обмотки л1 0,34 q1 5 (l л1 0,641 ) 0,34 (280,6 0,64 0,6 301,4) 1,87 l1 105 Коэффициент проводимости рассеяния обмотки статора 1 п1 д1 л1 0,567 0,7107 1,87 3,148 21 Индуктивное сопротивление обмотки фазы статора x 1 1,58 f1 l1 w 12 1 /( p q1 10 8 ) 1,58 50 105 85 2 3,148 /(1 5 10 8 ) 0,3773 Ом Индуктивное сопротивление обмотки фазы статора в относительных единицах x1* x1 I1 / U1 0,3773 45,8 0, 0785 380 Проверка правильности определения x 1 x1* * 0,39 ( D1 A1 ) 2 l1 1 107 0,39 (192 386, 6)2 105 3,148 107 0, 0783 m1 U1 I1 z1 3 380 40, 7 30 Активное сопротивление стержня клетки при 20 0С rСТ где l2 105 1,18 10 5 Ом 3 3 а 20 SСТ 10 27 330,2 10 а 20 27 См / мкм - удельная электрическая проводимость алюминия при 20 °C. Коэффициент приведения тока кольца к току стержня р 3,14 1 2 k пр 2 2 0,285 22 z2 Сопротивление короткозамыкающих колец, приведенное к току стержня при 20 0С rКЛ 2 D КЛ .СР 2 3,14 148 1,326 10 5 Ом 2 3 2 3 а 20 z 2 SКЛ k ПР 2 10 27 22 1453 0,285 10 Центральный угол скоса пазов ск=0 т.к. скоса нет. Коэффициент скоса пазов ротора k ск 1 22 Коэффициент приведения сопротивления обмотки ротора к обмотке статора 4 m1 k пр1 z2 2 w k 4 3 85 0,774 1 ОБ1 2361 k 22 1 ск 2 Активное сопротивление обмотки ротора при 20 0C, приведенное к обмотке статора r2/ k пр1 (rСТ rКЛ ) 10 4 2361 (1,18 1,326 ) 10 5 0,0592 Ом Активное сопротивление обмотки ротора при 20 0C, приведенное к обмотке статора в относительных единицах r2/ r2/ I1 / U1 0,0592 40,7 / 220 0,011 * Ток стержня ротора для рабочего режима I2 2w1 kоб1 P2 (0, 2 0,8cos / ) 103 U1 z2 / cos / 2 85 0, 774 22 (0, 2 0,8 0,9) 103 671,8 А 380 22 0,91 0,9 Коэффициент проводимости рассеяния для овального закрытого паза ротора П2 h h 0.8 r2 1,12 2 10 3 1 I2 6r1 2 r12 b 0,66 ш 2 0,3 1 4r1 2 S ст 2 0,3 23,91 0,8 3,34 3,14 6,75 2 1,5 3 1,12 10 1 0,3 1,807 0,66 671,8 6 6,75 2 330,2 4 6,75 Количество пазов ротора на полюс и фазу q2 z2 22 3,67 2 p m1 2 1 3 Принимаем коэффициент дифференциального рассеяния ротора k д 2 0,008 . 23 Коэффициент проводимости дифференциального рассеяния 2 2 z2 22 k Д 2 0,9 27 0,9 t 2 0,008 6 p 6 1 д2 2,351 k 1 1,11183 Коэффициент проводимости рассеяния короткозамыкающих колец литой клетки кл 2,35 D КЛ .СР 2,9 D КЛ .СР lg 2 z 2 l 2 k пр 2 h КЛ l КЛ 2,9 148 2,35 148 lg 1,503 2 22 105 0 , 285 42 34 , 6 Относительный скос пазов ротора, в долях зубцового деления ротора ск 2 1 Коэффициент проводимости рассеяния скоса пазов ск 0 Коэффициент проводимости рассеяния обмотки ротора 2 П 2 Д 2 кл ск 1,807 2,351 1,503 0 5,661 Индуктивное сопротивление обмотки ротора x 2 7,9 f1 l 2 2 10 9 7,9 50 105 5,661 10 9 0,235 10 3 Ом Индуктивное сопротивление обмотки ротора, приведенное к обмотке статора x 2 ' k пр1 х 2 2361 0,235 10 3 0,555 Ом Индуктивное сопротивление обмотки ротора, приведенное к обмотке статора, в относительных единицах x2 * x2 I1 0,555 40, 7 0,103 U1 380 24 Проверка правильности определения x 2 * x 1 0,3773 0,684 х 2 0,555 Должно выполняться условие x1 0,7 1,0 . Данное условие выполняется. х2 Коэффициент рассеяния статора 1 x 1 / x m 0,3773 / 24 0,0157 Коэффициент сопротивления статора 1 r1 mT /( x1 x m ) 0,15 1,38 /(0,3784 24) 8,5 10 3 где m T 1,38 -коэффициент. Преобразованные сопротивления обмоток r1 ' m T r1 1,38 0,15 0,207 Ом x 1 ' x 1 (1 1 ) 0,3773 (1 0,01577 ) 0,383 Ом r2 mT r2 (1 1 ) 2 1,38 0,0592 (1 0,01577 ) 2 0,0843 Ом x2 x 2 (1 ' ) 2 0,553 (1 0,0157 ) 2 0,5706 Ом Пересчет магнитной цепи не требуется, так как k НАС 1,7 и 1 0,05 . 25 6 Расчет постоянных потерь мощности Так как 1 0,0085 0,1, в дальнейших расчетах примем 12 0 . Реактивная составляющая тока статора при синхронном вращении I c.p. U1 /x m (1 1 )(1 12 ) 220 /24 (1 0,0158 ) (1 0) 9,02 А Электрические потери в обмотке статора при синхронном вращении Pc.м1 m1 I c2.p r1/ (1 12 ) 3 9,02 2 0,207 (1 0) 50,52 Вт Расчетная масса стали зубцов статора при трапецеидальных пазах mз1 7,8 z1 b z1 h П1 l1 k c 10 6 7,8 30 7 24,8 105 0,97 10 6 4,14 кг Магнитные потери в зубцах статора PЗ1 4,4 В 2З1ср m з1 4,4 1,8 2 4,14 59,02 Вт Масса стали спинки статора m c1 7,8 (D H1 h c1 ) h С1 l1 k c 10 6 7,8 3,14 (322 40) 40 105 0,97 10 6 28,14 кг Магнитные потери в спинке статора Pc1 4,4 Вc21ср m с1 4,4 1,68 2 28,14 349,5 Вт Суммарные магнитные потери в сердечнике статора, включающие добавочные потери в стали t Pc Pз1 1 2 1 (k 1) 2 Pc1 10 20,14 59,02 1 2 (1,11183 1) 2 349,5 427 ,25 Вт 10 26 Механические потери при степени защиты IP44, способе охлаждения IC0141 Pмх k мх (n 1 / 1000 ) 2 (D H1 / 100) 4 0,8814 (3000 / 1000 ) 2 (322 / 100) 4 852,8 Вт где k мх 1,3 (1 D н1 / 1000 ) 1,3 (1 322 / 1000 ) 0,8814 Активная составляющая тока х.х. I oa ( Pс. м1 Pc Pмх ) / (m1 U1 ) (50,52 427, 25 852,8) / (3 380) 2,016 А Ток холостого хода I o I oa2 I c2.p 2,016 2 9,02 2 9,24А Коэффициент мощности при х.х. cos 0 I oa / I o 2,016 / 9,24 0,22 Активное сопротивление к.з. rk r1 r2 0,207 0,0843 0,291 Ом Индуктивное сопротивление к.з. x k x 1 x 2 0,383 0,5706 0,954 Ом Полное сопротивление к.з. z k rk2 x 2k 0,2912 0,954 2 0,997 Ом Добавочные потери при номинальной нагрузке PД 0,005 Р 2 10 3 / ' 0,005 22 10 3 / 0,91 120,9 Вт Механическая мощность двигателя P2 ' P2 10 3 Pмх Р Д 22 10 3 852,8 120,9 22973,7 Вт 27 Эквивалентное сопротивление схемы замещения 2 m U 2 m U 2 3 3802 RH 1 1 rk 1 1 rk zk2 0, 291 2 P2 2 22973, 7 2 P2 ' 2 3 3802 0, 291 0,997 2 5,56 Ом 2 22973, 7 Полное сопротивление схемы замещения z H (R H rK ) 2 x 2k (5,56 0,291) 2 0,954 2 5,93 Ом Проверка правильности расчетов RH и z H RH / zH2 P2 / (m1U12 ); 5,56 / 5,932 22973, 7 / (3 3802 ); 0,1581 0,1582 Скольжение SH 1 1 0,015 1 R H / r2 " 1 5,56 / 0,0843 Активная составляющая тока статора при синхронном вращении I c.a (Pc.м1 Р с ) /( m1 U1 ) (50,52 427,25) /(3 220) 0,724 А Ток ротора I 2 U1 / zH 380 / 5,93 37,1 А Активная составляющая тока статора R r 1 12 х k 21 0,724 37,1 I a1 I ca I2 H k 1 12 z H 1 12 zH 5,56 0,291 1 0 0,955 2 0,0085 37,43 А 5,93 1 0 5,93 1 0 Реактивная составляющая тока статора 28 x 1 12 R H rk 21 I p1 I 0.p I 2 k 2 z H 1 12 z H 1 1 0,955 5,56 0,291 2 0,0085 9,02 37,1 14,34 А 5,63 1 0 5,93 Фазный ток статора I1 I a21 I 2p1 37,432 14,34 2 40,08 А Коэффициент мощности cos I a1 / I1 37,43 / 40,08 0,934 Линейная нагрузка статора A1 10 I1 N П1 /(а 1 t 1 ) 10 40,1 17 /(1 20,14) 338,5А / см Плотность тока в обмотке статора J1 I1 40,1 5,25 А / мм 2 c S a 1 4 1,911 1 Линейная нагрузка ротора A 2 A1 I2 (1 1 ) 1 2 k ОБ1 / I1 k ОБ2 k ck 343,5 37,1 (1 0,0158) 1 0 0,774 / 40,1 1 1 249,9 А / мм 2 где k ОБ 2 1 -обмоточный коэффициент для короткозамкнутого ротора. Ток в стержне короткозамкнутого ротора I СТ I2 2 m1 w 1 k об1 (1 1 ) 1 2 / z 2 k ck 37,1 2 3 85 0,774 (1 0,0158) 1 0 / 22 1 676,2 А Плотность тока в стержне короткозамкнутого ротора J ст I СТ / SСТ 676,2 / 330,2 2,05 А / мм 2 Ток в короткозамыкающем кольце I КЛ I СТ / k ПР 2 676,2 / 0,285 2372 ,63 А 29 Электрические потери в обмотке статора PМ1 m1 I12 r1 3 40,12 0,207 998,6 Вт Электрические потери в обмотке ротора PМ 2 m1 I22 r2 " 3 37,12 0,0843 348,1 Вт Суммарные потери в электродвигателе P PМ1 PМ 2 Pc PMX PД 998,6 348,1 427,25 852,8 120,9 2747 ,65 Вт Подводимая мощность P1 P2 103 P 22 103 2747,65 24747 ,65 Вт Коэффициент полезного действия P 2747 ,65 1 100 1 100 88,9 % P 24747 , 65 1 Подводимая мощность P1 m1 I a1 U1 3 37, 43 380 24704 Вт Подводимые мощности, рассчитанные по формулам должны быть равны друг другу, с точностью до округлений. Данное условие выполняется. Отдаваемая мощность P2 m1 I1 U1 100 cos 3 40,1 380 88,9 0,934 21975, 4 Вт 100 Отдаваемая мощность должны соответствовать отдаваемой мощности, указанной в техническом задании. Данное условие выполняется. 30 7 Рабочие характеристики АД Расчет рабочих характеристик ведем в форме таблицы 1. Таблица 2 – Рабочие характеристики асинхронного двигателя Р2, кВт Рд,Вт P2',Вт Rн,Ом Zн,Ом S,о.е. I2'',A Ia1,A Ip1,A I1,A cosφ Pm1,Вт Pm2,Вт P P1,Вт η 5,5 30,2 6383 22,12 22,43 0,0038 9,8 10,53 9,27 14,03 0,75 122 24,3 1456,8 6957 79,1 11 60,4 11913 11,52 11,85 0,0073 18,6 19,26 10,20 21,79 0,88 295 87,2 1722,5 12723 86,5 16,5 90,7 17443 7,61 7,96 0,0110 27,6 28,22 11,87 30,61 0,92 582 193,2 2145,9 18646 88,5 22 120,9 22974 5,56 5,93 0,0149 37,1 37,46 14,37 40,12 0,93 999 348,3 2748,7 24749 88,9 27,5 151,1 28504 4,28 4,67 0,0193 47,1 47,01 17,86 50,29 0,93 1571 561,4 3563,1 31063 88,5 Рабочие характеристики приведены на рисунках 5 и 6. S Скольжение S I1 Ток I1 0,025 60 50 0,020 40 0,015 30 0,010 20 0,005 10 0,000 0 0 5 10 15 мощность 20 25 30 Рисунок 5 31 cos Ф cos Ф КПД КПД 1,0 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0 90 88 86 84 82 80 78 0 5 10 15 мощность 20 25 30 Рисунок 6 32 8 Пусковые характеристики АД Высота стержня клетки ротора h ст h П 2 h 2 h ш 2 35 0,3 0,7 34 мм Приведенная высота стержня ротора 0,0735 h ст s 1 0,0735 34 2,054 mT 1,48 Принимаем коэффициент 0,08 ([1], рисунок 9-23). Расчетная глубина проникновения тока в стержень h p h cт /(1 ) 34 /(1 0,08) 18,89 мм Ширина стержня на расчетной глубине проникновения тока в стержень b p 2r1 2 (r1 r2 ) (h p r1 ) h1 2 6,75 2 (6,75 3,34) (18,89 6,75) 10,04 мм 23,91 Площадь поперечного сечения стержня при расчетной глубине проникновения тока b 2 r1 (r1 p ) (h p r1 ) 2 2 3,14 10,04 6,75 2 (6,75 ) (18,89 6,75) 214,42 мм 2 2 2 Sp Коэффициент вытеснения тока k В.Т Scт / Sp 330,2 / 214,42 1,54 Активное сопротивление стержня клетки при 20 0С для пускового режима rcm.n rcm k В.Т. 1,18 10 5 1,54 1,817 10 5 Ом 33 Активное сопротивление обмотки ротора при 20 0С, приведенное к обмотке статора, для пускового режима r2П k ПР1 (rcm.n rКЛ ) 2361 (1,817 1,326) 10 5 0,0742 Ом Принимаем коэффициент 0,7 . Коэффициент проводимости рассеяния паза ротора при пуске для овального закрытого паза П 2П h 0,8r r 2 2 h 2 10 3 bш2 0,3 10 3 1 2 1 1 0,66 1,12 0,3 1,12 2 2Scm 4 r1 671,8 6 r1 23,91 0,8 3,34 3,14 6,75 2 2 1,5 0,3 1 0,66 0,7 1,5052 6 6 , 75 2 330 , 2 4 6 , 75 Коэффициент проводимости рассеяния обмотки ротора при пуске 2 П П 2 П Д 2 КЛ СК 1,5052 2,351 1,503 0 5,359 Индуктивное сопротивление рассеяния двигателя, зависящее от насыщения x пер x1 ' 1пер 1 x2 2пер 2П 0,383 2,542 2,851 0,5706 0,613 Ом 3,148 5,359 Индуктивное сопротивление рассеяния двигателя, не зависящее от насыщения x пост x 1 0,383 1 1пер 1 x 2 2 П 2 пер 2П 3,148 - 2,542 5,359 - 2,851 0,5706 0,3408 Ом 3,148 5,359 Активное сопротивление к.з. при пуске rк .п r1 r2П m T (1 1 ) 2 (1 1 ) 2 0,207 0,0742 1,48 (1 0,0157 ) 2 (1 0,0085) 2 0,322 Ом 34 Ток ротора при пуске двигателя IП 2 U1 rк2.п. ( x пост 0,25 x пер ) 2 1,24 10 3 а 1 x пер ( x пост 0,25 x пер ) N П1 [rк2.п. ( x пост 0,25 x пер ) 2 ] 1,24 10 3 1 1 0,613 (0,3408 0,25 0,613) 17 0,322 2 (0,3408 0,25 0,613) 2 0,322 2 (0,3408 0,25 0,613) 2 220 309,54 А Полное сопротивление схемы замещения при пуске (с учетом явлений вытеснения тока и насыщения путей потоков рассеяния) z к.п. U1 / IП 2 220 / 309,54 0,7107 Ом Индуктивное сопротивление схемы замещения при пуске x к.п z к2.п. rк2.п 0,7107 2 0,322 2 0,6337 Ом Активная составляющая тока статора при пуске rк.п 1 12 x к.п 2 1 I п.a1 I c. I П 2 2 2 z 1 z 1 к .п 1 к .п 1 0,322 1 - 0 0,6337 2 0,0085 0,724 309,54 145,66 А 1 0 0,7107 1 0 0,7107 Реактивная составляющая тока статора при пуске x 1 12 rк .п 2 1 I п.р1 I c.р IП 2 к .п 2 2 z к .п 1 1 z к . п 1 1 0,6337 1 0 0,322 2 0,0085 9,02 309,54 282,64 А 1 0 0,7107 1 0 0,7107 Фазный ток статора при пуске I П1 I п2.а1 I п2.р1 145,66 2 282,64 2 318 А Кратность начального пускового тока I П1 318 7,93 I1 40,1 35 Активное сопротивление ротора при пуске, приведенное к статору, при расчетной рабочей температуре и Г-образной схеме замещения r2П r2П m T (1 1 ) 2 (1 12 ) 0,0742 1,48 (1 0,0157) 2 (1 0) 0,1133 Ом Критическое скольжение определяем после расчета всех точек пусковых характеристик по средним значениям сопротивлений х1нас и х 2 нас , соответствующим скольжениям S 0,2...0,1 Skp S кр r2 х1нас с1n.нас x2 нас r2 х1нас / с1п.нас х 2 нас с1п.нас 1 0.133 0.13 0.383 0.5706 1 0,186 0,14 0,59 / 1,015 0,713 . х1нас 0,131 1 1,017. 7,7 х12 п После чего рассчитываем кратность максимального момента Мкр=1,95. Кратность начального пускового момента MП m1 IП 22 r2П (1 s H ) /( P2 10 3 ) 3 309,54 2 0,1133 (1 - 0,015)/(22 10 3 ) 1,458 МН 36 1 – кратность пускового момента М п* ; 2 – кратность пускового тока I п* . Рисунок 7 – Пусковые характеристики спроектированного двигателя (Skp=0.13, Mmax=2.6) 37 9 Тепловой расчеты Потери в обмотке статора при максимально допускаемой температуре PM 1 m1 I12 mT r1 3 40,12 1,48 0,207 1476,4 Вт где mT 1,48 - коэффициент. Условная внутренняя поверхность охлаждения активной части статора SП1 D1 l1 3,14 192 105 63440 мм 2 Условный периметр поперечного сечения трапецеидального полузакрытого паза П1 2h n1 b1 b 2 2 24,8 18,33 14,33 82,3 мм Условная поверхность охлаждения пазов Sи.п1 z1 П1 l1 30 82,3 105 259120 мм 2 Условная поверхность охлаждения лобовых частей обмотки Sл1 4 D1 l B1 4 3,14 192,42 65,16 157478 мм 2 Условная поверхность охлаждения двигателя с охлаждающими ребрами на станине Sмаш .р ( D H1 8 n p h p ) (l1 2l B1 ) (3,14 322 8 36 30) (105 2 65,16) 2271092 мм 2 где h p 0,6 4 h 3 0,6 4 180 30 мм - высота ребра. n p 6,4 3 h 6,4 3 180 36 - число ребер. 38 Удельный тепловой поток от потерь в активной части обмотки и от потерь в стали, отнесенных к внутренней поверхности охлаждения активной части статора p п1 k (PM 1 2 l1 / l cp1 Pc ) / Sп1 0,22 (998,6 2 105 / 771,2 427 ,25) / 63440 2,42 10 -3 Вт / мм 2 где k 0,22 - коэффициент. Удельный тепловой поток от потерь в активной части обмотки, отнесенных к поверхности охлаждения пазов p и.п1 (PM 1 2 l1 / l ср1 ) / Sи.п1 (998,6 2 105 / 771,2) / 259120 1,05 10 -3 Вт / мм 2 Удельный тепловой поток от потерь в лобовых частях обмотки, отнесенных к поверхности охлаждения лобовых частей обмотки p л1 (PM 1 2 l л / l ср1 ) / Sл1 (998,6 2 105 / 771,2) / 157478 1,73 10 -3 Вт / мм 2 Окружная скорость ротора V2 DH 2 n1 / 60000 3,14 190 750 / 60000 7.5 м/с Превышение температуры внутренней поверхности активной части статора над температурой воздуха внутри машины t п1 р п1 / 1 2,42 10 -3 /(17,5 10 -5 ) 13,8 C где 1 17,5 10 5 - коэффициент теплоотдачи поверхности статора ([1], рисунок 9-24). Перепад температуры в изоляции паза и катушек из круглых проводов b (b b 2 ) 18,33 14,33 0,4 t и.п1 р и.п1 и1 1 1,05 10 -3 4,34 С -5 -5 16 ' 16 10 16 125 10 экв экв 39 где экв 16 10 5 Вт /( мм град) - эквивалентный коэффициент теплопроводности изоляции в пазу; экв 125 10 5 Вт /(мм град) - эквивалентный коэффициент теплопроводности внутренней изоляции катушки ([1], рисунок 9-26). Превышение температуры наружной поверхности лобовых частей обмотки над температурой воздуха внутри двигателя t л1 р л1 / 1 1,73 10 -3 /(17,5 10 -5 ) 10 C Перепад температуры в изоляции лобовых частей катушек из круглых проводов b h п1 24,8 0,4 t и. л1 р л1 и. л1 1,73 10 3 7,2 C 5 5 12 ' 16 10 12 125 10 экв экв где b и.л1 0,4 мм - односторонняя толщина изоляции катушек в лобовой части. Среднее превышение температуры обмотки над температурой внутри двигателя t 1 (t п1 t и.п1 ) 2 l л1 2 l1 (t л1 t и.л1 ) l cp1 l cp1 13,8 4,34 2 105 (10 7,2) 2 105 9,6 771,5 771,5 0 С Потери в обмотке ротора при максимальной температуре PМ 2 m1 I22 mT r2 3 37,12 1,48 0,0843 515,2 Вт Потери в двигателе со степенью защиты IP44, передаваемые воздуху внутри двигателя 40 P k (PM 1 2 l л1 2 l1 Pc ) PM 1 PM 2 0,1 Pмх PД 0,22 l cp1 l cp1 2 105 2 105 427,25) 998,6 348,1 0,1 852,8 771,5 771,5 120,9 980 Вт (998,6 Среднее превышение температуры воздуха внутри двигателя над температурой наружного воздуха t B P /(Sмаш.р В ) 980 /( 2271092 2,4 10 5 ) 18 C где в 2,4 10 5 - коэффициент подогрева воздуха. Среднее превышение температуры обмотки над температурой наружного воздуха t 1 t 1 t B 9,6 18 27,6 C Наружный диаметр корпуса D корп 2 (h h1 ) 2 (180 7) 346 мм где h 1 7 мм - расстояние от нижней части корпуса машиниы до опорной поверхности лап. Коэффициент, учитывающий изменение теплоотдачи по длине корпуса двигателя K2 2, 2 4 (n1 /1000)3 Dкорп /100 2, 2 4 (750 /1000) 3 346 /100 3.3 Необходимый расход воздуха VB K 2 P /(cB t B ) 9,33 980 /(1100 18 2) 0,231м3 / с где сВ 1100 Дж /(C м3 ) – теплоемкость воздуха. Расход воздуха, который может быть обеспечен наружным вентилятором 41 VB 0, 6 (n1 /1000) ( Dкорп /100)3 102 0, 6 (750 /1000) (346 /100)3 102 0,186 м3 / с Расход воздуха, который может быть обеспечен наружным вентилятором, должен превышать необходимый расход воздуха. Данное условие выполняется. Напор воздуха, развиваемый наружным вентилятором H 12,3 (n1 /1000)2 ( Dкорп /100)2 12,3 (750 /1000)2 (346 /100)2 82.83 Па 42 Заключение В результате проектирования был разработан асинхронный двигатель с короткозамкнутым ротором, который полностью отвечает требованиям, поставленным в курсовом проекте. Все проверяемые параметры отвечают критериям, рекомендуемым ГОСТ. Из-за перехода на меньшую высоту оси вращения, разработанный двигатель по некоторым технико-экономическим параметрам уступает существующим двигателям аналогичной мощности. 43 Список литературы 1. Гольдберг О.Д., Свириденко И.С. Проектирование электрических машин: Учебник. / Под ред. О.Д. Гольдберга. 3-е изд., перераб. – М.:Высш.шк., 2006, - 430с.: ил. 2. Анурьев В.И. Справочник конструктора-машиностроителя: В 3-х т. Т. 1 – 8-е изд., перераб. и доп. Под ред. И.Н. Жестковой. – М.: «Машиностроение», 2001. – 920с. 3. Антонов М.В. Технология производства электрических машин: Учебник для вузов. – 2-е изд., перераб. и доп. – М.: Энергоатомиздат, 1993. – 592с.: ил. 4. Орлов П.И. Основы конструирования: Справочно-методическое пособие. В 2-х кн. /Под ред. П.Н. Учаева – 3-е изд., испр. – М.: «Машиностроение», 1988. – 560с.: ил. 5. ГОСТ 21424-93. Муфты упругие втулочно-пальцевые. Параметры и размеры. Дата введения 01.07.96. Взамен ГОСТ 21424-75. 44