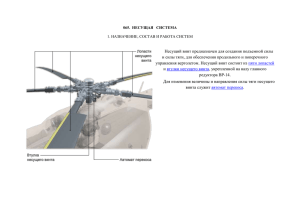
Самарский государственный аэрокосмический университет имени академика С.П. Королева. Кафедра: «Эксплуатация летательных аппаратов». Тема № 1. Основы аэродинамики одновинтового вертолета. Учебное пособие. (Компьютерный вариант) Составил: Сошин В.М. Пособие предназначено для студентов 2-го курса специальности 130300, изучающих конструкцию вертолета Ми-8 по дисциплине «Авиационная техника». Учебное пособие размещено в двух файлах. Имена файлов: E:\ ПОСОБИЯ \ Ми-8 \ Аэродинамика \ часть1.doc Размер файла: 981 кб. E:\ ПОСОБИЯ \ Ми-8 \ Аэродинамика \ часть2.doc Размер файла: 614 кб. Содержание файлов: …часть1: краткая история развития вертолетов, общие сведения о вертолетах, основные характеристики несущего винта; …часть2: работа несущего винта на режиме осевого обтекания, особенности работы несущего винта на режиме косого обтекания, управление вертолетом, горизонтальный полет вертолета, литература, приложение. Файлы помещены в компьютере «Server» ауд. 113-5 Дата составления: 28 января 2005 г. Дата внесения изменений: 28 января 2005 г. Допущено для использования в учебном процессе. Протокол заседания кафедры «ЭЛА» № ______ от «___» ___________ 2005 г. Самара 2005 г. 1. КРАТКАЯ ИСТОРИЯ РАЗВИТИЯ ВЕРТОЛЕТОВ Вертолетом называется летательный аппарат тяжелее воздуха, у которого подъемная сила, уравновешивающая силу тяжести, создается несущим винтом при обтекании его лопастей воздушным потоком. Идея создания летательного аппарата с воздушным винтом, который создает подъемную силу, впервые была высказана в 1475 г. Леонардо да Винчи (рис.1). Но осуществить этот проект не позволяли технические возможности того времени. Поэтому идея гениального ученого дальнейшего продолжения не получила а сам проект был надолго утерян. Эскиз и описание этого летательного аппарата были обнаружены в Миланской библиотеке и опубликованы лишь в конце XIX в. Рис.1. Эскиз вертолета Леонардо да Винчи В 1754 г. М. В. Ломоносов обосновал возможность создания летательного аппарата тяжелее воздуха и построил модель двухвинтового вертолета с соосным расположением винтов. Модель предназначалась для подъема вверх метеорологических приборов. В качестве двигателя для вращения несущих винтов использовалась часовая пружина. Не смотря на то, что в силу многих причин (низкий уровень техники того времени, большая относительная масса пружин, отсутствие иного двигателя) работа М. В. Ломоносова не была завершена, значение ее велико. В XIX в. многие русские ученые и инженеры разрабатывали проекты летательных аппаратов с несущими винтами. В 1869 г. инженером-электриком А. Н. Лодыгиным был предложен проект вертолета с электрическим двигателем. В 1870 г. разработкой воздушных винтов занимался известный ученый М. А. Рыкачев. Ученый-металлург Д. К. Чернов разработал схемы вертолетов с продольным, поперечным и соосным расположением винтов. В конце XIX в. разработкой летательных аппаратов занимаются выдающиеся русские ученые Д. И. Менделеев, К. Э. Циолковский, Н. Е. Жуковский, С. А. Чаплыгин. Начинается период глубокого научного обоснования идеи полета на летательных аппаратах тяжелее воздуха. Ближайший ученик Н. Е. Жуковского — Б. Н. Юрьев в 1911 г. предложил обоснованный проект одновинтового вертолета с рулевым винтом и разработал основной агрегат управления вертолетом — автомат перекоса несущего винта. После окончания первой мировой войны во многих странах возродился интерес к вертолетам и появились реальные технические возможности по их созданию. Во Франции, Испании, Австрии, США в 1920-е годы были построены вертолеты, которые могли летать на высоте нескольких метров в течение нескольких минут. В это же время в нашей стране начала развиваться собственная авиационная промышленность, работы над созданием вертолета были продолжены. В 1925 г. в ЦАГИ под руководством Б. Н. Юрьева была организована экспериментальная группа особых конструкций, которая занималась разработкой вертолетов. В 1930 г. был построен первый советский вертолет ЦАГИ1-ЭА (рис.2), испытателем этого вертолета был руководитель его постройки инженер Алексей Михайлович Черемухин. В 1932 г. Черемухин на этом вертолете установил мировой рекорд высоты — 605 м. Рис.2. Вертолет ЦАГИ1-ЭА 2 В 1948 г. построены одновинтовые вертолёты Ми-1 и Як-100. Эти вертолеты были спроектированы в ОКБ, руководимыми генеральными конструкторами М. Л. Милем и А. С. Яковлевым. В результате государственных испытаний лучшим по своим характеристикам оказался вертолет Ми-1, который и был принят к серийному производству (рис.3). С этого времени ОКБ М. Л. Миля стало ведущим по проектированию вертолетов в нашей стране. В этом же году было основано ОКБ, руководимое Н. И. Камовым. Рис.3. Вертолет Ми-1 В 1952 г. построен вертолет Ми-4, который для того времени имел самую большую полезную нагрузку. В том же году построен и совершил первый полет двухвинтовой вертолет продольной схемы Як-24 — «летающий вагон» конструкции А. С. Яковлева (рис.4). Рис.4. Вертолет Як-24 В 1958 г. построен тяжелый вертолет Ми-6, который широко применяется при освоении богатств Западной Сибири. Вплоть до 1980г. этот вертолет строился серийно. На вертолете Ми-6 было установлено 16 мировых рекордов. В 1961г. построены вертолеты с газотурбинными двигателями Ми-2 и Ми-8 (рис.5). Вертолет Ми-8 до настоящего времени выпускается серийно. На базе вертолета Ми-8 создано несколько десятков модификаций, он экспортируется во многие страны мира. На вертолете Ми-8 было установлено 7 мировых рекордов. Рис. 5 Вертолет Ми-8 В 1965 г. в ОКБ под руководством Н. И. Камова был создан многоцелевой вертолет с соосными несущими винтами Ка-26 (рис.6). Созданию различных по назначению вариантов способствовало применение на Ка-26 необычного конструктивно-компоновочного решения фюзеляжа в виде «летающего шасси». Это подразумевает установку на вертолет различного быстросъемного навесного оборудования. На Ка-26 было установлено 5 мировых рекордов. 3 Рис.6. Вертолет Ка-26 В 1967г. был создан вертолет Ми-12 (рис.7). Вертолет успешно прошел испытания, но серийно не строился. На Ми-12 было установлено 7 мировых рекордов. Среди них рекорд грузоподъемности для вертолетов (груз 40 тонн был поднят на высоту 2250 м). Рис.7. Вертолет Ми-12 В 1981г. началось производство тяжелого транспортного вертолета Ми-26 — самого грузоподъемного из существующих в мире серийных вертолетов. При проектировании и производстве Ми-26 (рис.8) широко использовались достижения современной науки и техники. Рис.8. Вертолет Ми-26 В 1987 г. началось серийное производство вертолета Ка-32 (рис.9). Этот вертолет способен поднимать на внешней подвеске 5 тонн груза. Он предназначен для перевозки грузов, монтажа опор, проводки караванов судов по Северному морскому пути. На вертолете Ка-32 установлено 8 мировых рекордов. 4 Рис.9. Вертолет Ка-32 Способность вертолета к вертикальному полету, возможность движения в любом направлении делают его очень маневренным летательных аппаратом, независимым от аэродромов, и значительно расширяют границы его использования. В настоящее время вертолеты находят все более широкое применение в различных областях народного хозяйства. Они являются основным средством передвижения в местах, где нельзя использовать наземный транспорт и самолеты. Вертолеты используются при строительно-монтажных работах, для спасения людей и имущества во время стихийных бедствий. В последнее время вертолеты находят широкое применение в сельском хозяйстве. Перечисленными примерами далеко не исчерпываются возможности использования вертолетов как летательных аппаратов. 2. ОБЩИЕ СВЕДЕНИЯ О ВЕРТОЛЕТАХ 2.1. Классификация вертолетов Основной признак, по которому классифицируются вертолеты, это количество несущих винтов и их расположение. По количеству несущих винтов вертолеты можно разделить на одновинтовые, двухвинтовые, многовинтовые. Одновинтовые вертолеты являются самой распространенной разновидностью, по этой схеме построено более 90% существующих вертолетов. Вертолет одновинтовой схемы имеет несущий винт, расположенный на основной части фюзеляжа, и рулевой винт — на хвостовой балке. Эту схему, которая была разработана Б. Н. Юрьевым в 1911 г., можно назвать классической. По такой схеме выполнены вертолеты Ми-1, Ми-8, Ми-26 (рис.3,5,8) и многие другие. Основными достоинствами одновинтовых вертолетов являются простота конструкции несущего винта и системы управления. По одновинтовой схеме строятся самые легкие вертолеты (полетный вес около 500 кгс) и самые тяжелые (полетный вес более 40 тонн). Недостатками одновинтовых вертолетов являются: — большая длина фюзеляжа; — значительные потери мощности на привод рулевого винта (710% от мощности двигателей); — ограниченный диапазон допустимых центровок (положения центра тяжести); — повышенный уровень вибраций (длинные валы трансмиссии, проходящие в хвостовой балке, являются дополнительным источником колебаний). Двухвинтовые вертолеты имеют несколько компоновочных схем, самыми распространенными из которых являются: — с продольным расположением винтов; (вертолет Як-24, рис. 4); — с поперечным расположением винтов (вертолет Ми-12, рис.7); — с соосным расположением винтов, это наиболее распространенная схема двухвинтовых вертолетов (вертолеты Ка-26, Ка-32, рис.6,9). Основные достоинства вертолетов с продольным расположением винтов: — более широкий диапазон допустимых центровок; — больший объем фюзеляжа, позволяющий вмещать крупногабаритные грузы; — увеличенная продольная устойчивость. На вертолетах продольной схемы может быть один или два двигателя, которые располагаются в носовой и хвостовой частях фюзеляжа. Эти вертолеты имеют, и серьезные недостатки: — сложную систему трансмиссии и управления; — вредное взаимное влияние несущих винтов, вызывающее дополнительные потери мощности; К преимуществам вертолетов с поперечным расположением винтов следует отнести: — удобное использование всего объема фюзеляжа для экипажа и пассажиров, так как двигатели находятся вне; фюзеляжа; 5 — отсутствие вредного влияния винтов друг на друга; — повышенная поперечная устойчивость и управляемость вертолета; — наличие вспомогательного крыла, на котором расположены двигатели и несущие винты, позволяет вертолету развивать большую скорость полета. Недостатками этих вертолетов являются: — сложная система управления и трансмиссии; — увеличенные габариты и вес конструкций из-за наличия вспомогательного крыла, Основное преимущество двухвинтовых вертолетов с соосными винтами — малые габариты конструкции. Их недостатки сложность конструкции. Их недостатки: — недостаточная путевая устойчивость и управляемость, — опасность соударения лопастей винтов; — значительные вибрации. По этой схеме строятся вертолеты только в Российской Федерации. Многовинтовые вертолеты распространения не получили ввиду сложности конструкции. У всех двухвинтовых вертолетов несущие винты вращаются в разные стороны. Этим взаимно уравновешиваются их реактивные моменты, отпадает необходимость иметь рулевой винт уменьшается непроизводительная затрата мощности двигателя. 2.2. Основные части одновинтового вертолета Основными частями одновинтового вертолета (рис.10) являются: — фюзеляж (поз.1,8,9,11,12), предназначенный для размещения экипажа пассажиров, создает требуемые внешние обводы вертолета, к нему крепятся все остальные части вертолета, воспринимает все действующие на вертолет нагрузки; — взлетно-посадочные устройства (поз.10,13,14), предназначенные для обеспечения нужного положения вертолета при взлете-посадке, восприятия ударных нагрузок при посадке вертолета, для передвижения вертолета по земле и для его стоянки; — силовая установка (поз.2), предназначенная для выработки мощности, необходимой для привода несущего, рулевого винтов, агрегатов вертолета. В настоящее время в качестве силовой установки применяются турбовальные двигатели со свободной турбиной (ТВаД); — несущий винт (поз.3,4), предназначенный для создания аэродинамической силы, уравновешивающей силу тяжести вертолета и обеспечивающей возможность его маневрирования и движения в любом направлении; — рулевой винт (поз.6,7), предназначенный для уравновешивания реактивного момента несущего винта (см. п.4.6) и обеспечения путевой управляемости вертолета; — трансмиссия (поз.5), предназначенная для передачи мощности от силовой установки к несущему и рулевому винтам, агрегатам вертолета. Рис.10. Компоновка вертолета Ми-8: 1— носовая часть фюзеляжа; 2— силовая установка; 3— втулка несущего винта; 4—лопасть несущего винта; 5— агрегаты трансмиссии; 6— лопасть рулевого винта; 7— втулка рулевого винта; 8— концевая балка; 9— стабилизатор; 10— хвостовая опора; 11— хвостовая балка; 12— центральная часть фюзеляжа; 13— главная стойка шасси; 14— передняя стойка шасси Кроме того, составными частями вертолета могут быть: противообледенительная система, система 6 управления вертолетом, гидравлическая система, воздушная система, система отопления или кондиционирования воздуха, устройства для внешней подвески грузов, такелажно-швартовочного, бытового, авиационного и радиоэлектронного оборудования и др. 3. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ НЕСУЩЕГО ВИНТА 3.1. Общая характеристика и конструктивные разновидности несущих винтов. Несущий винт (НВ) является основной частью вертолета. Он предназначен для создания аэродинамической силы, уравновешивающей силу тяжести вертолета и обеспечивающей возможность его маневрирования и движения в любом направлении; Основные части несущего винта — втулка и лопасти. Лопасти создают аэродинамические силы, необходимые для полета. Втулка соединяет все допасти и служит для крепления несущего винта к валу, который вращает винт. По конструктивным признакам несущие винты можно подразделить на три типa: — с жестким креплением лопастей; — с шарнирной подвеской лопастей; — с креплением лопастей на кардане. Несущий винт с жестким креплением лопастей (рис.11) является наиболее простой конструкцией, в этом его основное преимущество. Именно такое крепление лопастей было применено на вертолете ЦАГИ1ЭА. Но этому винту присущи и серьезные недостатки (см. приложение). Поэтому винты с жестким креплением лопастей не нашли применения на стременных вертолётах. Рис.11.Несущий винт с жестким креплением лопастей: 1— вал несущего винта; 2— лопасть; 3— втулка; 4— осевой шарнир; 5— поводок лопасти; 6— тяга Втулка несущего винта с жесткими лопастями имеет осевые шарниры (ОШ) 4, которые позволяют лопастям поворачиваться относительно продольной оси. Вращение лопастей относительно продольной оси осуществляется при перемещении тяги 6. Это необходимо для управления несущим винтом. Несущий винт с шарнирной подвеской лопастей является наиболее распространенным (рис.12). Его втулка имеет три шарнира для каждой лопасти: осевой (ОШ) 3, горизонтальный (ГШ) 7 и вертикальный (ВШ) 4. Работа такого винта будет подробно рассмотрена в данном пособии. Рис. 12. Втулка НВ с шарнирным креплением лопастей: 1— корпус втулки; 2— лопасть; 3— осевой шарнир; 4— вертикальный шарнир; 5— поводок лопасти; 6— тяга; 7— горизонтальный шарнир Несущий винт на кардане (рис.13) употребляется крайне редко, поэтому в данном пособии 7 рассматриваться не будет. Крепление лопастей на кардане часто применяется для рулевого винта вертолета, например, у вертолета Ми-8 (см. пособие по теме 5). Рис. 13. Несущий винт на кардане: 1,5— лопасть; 2— ступица втулки; 3— оси кардана; 4 — осевой шарнир; 6— поводок лопасти; 7— тяга 3.2. Геометрические характеристики Несущий винт характеризуется определенными геометрическими параметрами: диаметром, формой, лопасти в плане, формой профиля, установочным углом лопастей, ометаемой площадью, удельной нагрузкой, коэффициентом заполнения. Диаметр несущего винта— диаметр окружности, по которой движутся концы лопастей, его принято обозначать буквой D, радиус— R, радиус элемента лопасти— r (рис.14,а). Относительным радиусом элемента лопасти называется отношение радиуса элемента к радиусу винта: r r . R откуда r r R. Форма лопасти в плане может быть прямоугольная, трапециевидная и смешанная (рис.14, б,в,г). Рис.14. Параметры НВ и форма лопастей в плане По форме лопасть похожа на крыло самолета. Трапециевидная лопасть (рис.14,в) имеет наиболее равномерное распределение аэродинамических сил по длине лопасти. Прямоугольная лопасть (рис.14,б) проще по конструкции, но имеет несколько худшие аэродинамические характеристики. Наиболее распространенные лопасти трапециевидные и прямоугольные. На вертолете Ми-8 применены прямоугольные лопасти. Профиль лопасти — форма сечения лопасти плоскостью, перпендикулярной к продольной оси. Профиль лопасти похож на профиль крыла. Чаще всего применяются двояковыпуклые несимметричные профили (рис.15,а). Требования к профилю лопасти: — высокое аэродинамическое качество; — небольшое перемещение центра давления при изменении угла атаки. Профиль лопасти характеризуется относительной толщиной c f c и относительной кривизной b f b 8 Рис. 15. Параметры профиля лопасти (а) и установочный угол лопасти (б) По относительной толщине профили подразделяются на тонкие ( с <8%), средние ( с =812%) и толстые ( с >12%). У большинства лопастей относительная толщина с >0,12. Применение толстых профилей позволяет увеличивать прочность силовых элементов и жесткость лопасти. Кроме того, у толстых профилей сохраняется большая величина аэродинамического качества в широком диапазоне углов атаки. На вертолете Ми-8 применены лопасти, имеющие профиль с относительной толщиной в корневой части 12%, в средней и концевой частях — 11,38%. Относительная кривизна лопасти f =23%, т.е. форма профиля близка к симметричной, что способствует уменьшению перемещения центра давления при изменении угла атаки. Установочным углом элемента лопасти называется угол , образованный хордой элемента и плоскостью вращения втулки несущего винта (рис. 15,б). Установочный угол непосредственно связан с шагом элемента лопасти. Шагом элемента лопасти называют расстояние Н, которое проходит элемент лопасти за один оборот несущего винта, если элемент движется параллельно хорде: H 2 r tg . Так как у данного элемента лопасти шаг зависит только от установочного угла , то принято отождествлять изменение угла установки и шага элемента лопасти. У различных элементов лопасти установочные углы будут разными. За шаг лопасти принимается установочный угол, или шаг элемента лопасти, относительный радиус которого r 0,7 . Этот же угол принимается за установочный угол (шаг) в целом несущего винта. При повороте лопасти относительно ее продольной оси установочный угол изменяется. Такой поворот возможен благодаря наличию осевого шарнира. Следовательно, осевые шарниры лопастей несущего винта предназначены для изменения шага несущего винта. Геометрической круткой лопасти называется изменение шага элементов лопасти по радиусу несущего винта. У корневых элементов лопасти установочные углы наибольшие, у концевых — наименьшие (рис. 16). Геометрическая крутка улучшает условия работы разных элементов лопасти: углы атаки приближаются к наивыгоднейшим. Это приводит к увеличению силы тяги несущего винта на 57%, поэтому геометрическая крутка дает увеличение полезной нагрузки вертолета при постоянной мощности двигателя. Вследствие геометрической крутки достигается более равномерное распределение нагрузки на силовые элементы лопасти и увеличивается скорость полета, при. которой возникает срыв потока с отступающей лопасти (см. п.5.2). У большинства лопастей геометрическая крутка не превышает 57°. Рис. 16. К определению геометрической крутки лопасти (а) и геометрическая крутка лопастей некоторых вертолетов (б) 9 Под жесткостью понимают способность лопасти сохранять свою форму. При большой жесткости даже сильные нагрузки не способны деформировать конструкцию и внешний вид лопасти. При малой жесткости лопасть становится гибкой и легко деформируется, т.е. сильно изгибается и скручивается. Слишком большая гибкость не позволяет сохранить оптимальную крутку лопасти. Это ведет к ухудшению аэродинамических характеристик несущего винта. Для получения большой жесткости необходимо увеличивать габариты силовых элементов, что приводит к увеличению веса лопасти. Излишне большая жесткость приводит к возрастанию вибраций несущего винта. Площадь, ометаемая несущим винтом — это площадь круга, который описывают концы лопастей: F R2 D2 . 4 Эта характеристика несущего винта имеет примерно такое же значение, как площадь крыла самолета, т. е. она подобна площади несущей поверхности. Удельная грузка на ометаемую площадь определяется как отношение веса вертолета к площади, сметаемой несущим винтом: P G , F где Р — удельная нагрузка, кгс/м2; G — вес вертолета, кгс; F — ометаемая площадь, м2. У существующих вертолетов удельная нагрузка достигает 70 кгс/м2 (Ми-8 — 33,7 кгс/м2). Коэффициент заполнения равен отношению суммарной площади лопастей к площади, сметаемой несущим винтом: Sл k , Fл Где — коэффициент заполнения; Fл — площадь одной лопасти, м2; k — количество лопастей. У современных несущих винтов вертолетов количество лопастей, как правило, от 2 до 6 (Ми-8 — 5 лопастей, Ми-26 — 8 лопастей). Чаще всего бывает 34 лопасти у легких вертолетов 56 (до 8) — у тяжелых. Коэффициент заполнения имеет величину от 0,04 до 0,12. Это значит, что 412% площади, ометаемой винтом, занимают лопасти. Чем больше коэффициент заполнения, тем больше тяга, развиваемая винтом. Но при росте коэффициента заполнения возрастают силы сопротивления вращению, что может привести к снижению КПД несущего винта. 3.3. Основные режимы работы НВ Условия работы несущего винта или его режим работы определяются положением несущего винта в потоке воздуха. В зависимости от этого различают два основных режима работы: режим осевого обтекания и режим косого обтекания. Режимом осевого обтекания называются такие условия работы несущего винта, при которых ось его вращения расположена параллельно набегающему невозмущенному потоку. На режиме осевого обтекания невозмущенный поток набегает перпендикулярно плоскости вращения втулки несущего винта (рис. 17, а). В этом режиме несущий винт работает на стоянке, при висении, при вертикальном наборе высоты и при вертикальном снижении вертолета. Существенной особенностью режима осевого обтекания является то, что положение лопасти вращающегося несущего винта относительно потока, набегающего на винт, не меняется, следовательно, не меняются аэродинамические силы при движений лопасти по кругу. Режимом косого обтекания называются такие условия работы несущего винта, при которых поток воздуха набегает на винт непараллельно оси его вращения (рис.17,б,в,г). Существенное отличие этого режима от режима осевого обтекания заключается в том, что при движении лопасти по окружности непрерывно изменяется ее положение относительно потока, набегающего на винт. Следствием этого будет изменение скорости обтекания каждого элемента и аэродинамических сил лопасти Режим косого обтекания имеет место при горизонтальном полете вертолета и при полете по наклонной траектории вверх и вниз. Режим плоского обтекания является частным случаем режима косого обтекания. При этом режиме вектор скорости воздуха, набегающего на НВ, перпендикулярен оси вращения несущего винта. 10 3.4. Угол атаки НВ. Азимут лопасти Из определения режимов работы видно, что положение несущего винта в потоке воздуха имеет существенное значение. Это положение определяется углом атаки несущего винта. Углом атаки несущего винта (А) называется угол, образованный плоскостью вращения НВ и вектором скорости полета или скорости невозмущенного потока, набегающего на винт (V). Плоскостью вращения НВ называется плоскость перпендикулярная оси вращения НВ и проходящая через оси горизонтальных шарниров втулки несущего винта. Угол атаки положителен, если поток набегает на винт снизу (рис.17,б). Если поток набегает на винт сверху — угол атаки отрицательный (рис.). Если же поток воздуха набегает на винт параллельно плоскости вращения НВ, угол атаки равен нулю (рис.17,в). Нетрудно заметить связь между режимом работы несущего винта и углом атаки: на режиме осевого обтекания угол атаки несущего винта А = 900; на режиме косого обтекания А 900. При А =0°— режим плоского обтекания несущего винта (рис.17,г). Рис. .17. Режимы работы и углы атаки несущего винта Так как фактически винт не является сплошной несущей поверхностью, а состоит из лопастей, его аэродинамические характеристики складываются из характеристик лопастей, которые зависят от ориентации каждой лопасти относительно скорости полета (V). В плоскости вращения эта ориентация определяется углом () азимутального положения лопасти — углом между продольной осью лопасти и направлением, противоположным вектору скорости полета. Отсчет угла ведется по направлению вращения несущего винта (рис.18). Лопасти, проходящие в данный момент азимуты от 0о до 180°. называются наступающими, а в азимутах от 180 о до 360° — отступающими. Линию нулевого азимута не следует смешивать с направлением хвостовой балки вертолета. Например, на рис. показано азимутальное положение лопастей при полете вертолета с правым скольжением. Как видно из рисунка линия соответствующая =0 не совпадает ни с продольной осью вертолета ни с хвостовой балкой. При осевом обтекании понятие «азимут» теряет смысл и не применяется, так как все лопасти НВ работают в одинаковых условиях, не изменяющихся при их вращательном движении. При этом не изменяются и аэродинамические силы лопастей. Рис.18. Азимутальное положение лопастей НВ и начало отсчета азимута 11 3.4. Система координат. Силы, действующие на НВ Для рассмотрения законов движения вертолета в пространстве могут быть применены такие же системы координат, которые используются для самолетов: скоростная, связанная, земная и др. Однако для изучения аэродинамических сил, действующих на лопасти НВ удобнее применять полусвязанную систему координат: ОНВxНВyНВzНВ (рис.19). Своё название система получила от расположения осей: одна из осей привязана к элементам конструкции вертолета, другая — к вектору скорости полета. Система ориентирована следующим образом (рис.19): — начало координат ОНВ расположено в центре втулки НВ (в точке пересечения оси вращения НВ с его плоскостью вращения); — ось ОНВyНВ — ось тяги (нормальная), совпадающая с осью вала НВ и направленная в сторону действия силы тяги винта; — ось ОНВxНВ — продольная, лежит в плоскости вращения НВ и направлена по проекции вектора воздушной скорости вертолета (Vхнв) на плоскость вращения несущего винта; — ось ОНВzНВ — боковая, образует с осями ОНВxНВ и ОНВyНВ правую полусвязанную систему координат. Эта система координат используется главным образом при анализе условий работы НВ и определении его результирующей аэродинамической силы. Рис.19 Полусвязанная система координат несущего винта вертолета При взаимодействии лопастей несущего винта с воздушным потоком образуется полная аэродинамическая сила (R), которая в силу симметричности конструктивного исполнения несущего винта и шарнирной подвески лопастей, приложена к центру втулки, т.е. в точке ОНВ. Эту силу можно разложить на составляющие по осям в системе координат ОНВxНВyНВzНВ. В результате получим: — сила Т — тяга несущего винта, ориентирована по оси ОНВyНВ; — сила Н — продольная сила, ориентирована по оси ОНВxНВ; — сила S — боковая сила, ориентирована по оси ОНВzНВ. Рис.20. Аэродинамические силы несущего винта в полусвязанной системе координат 12