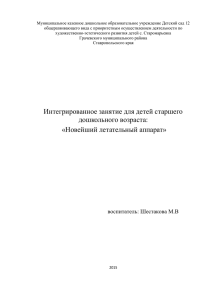
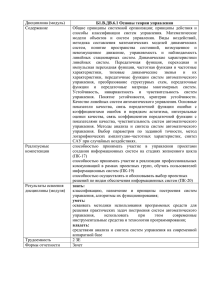
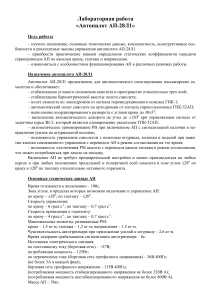
1 Направления подготовки: Дисциплина: Курс, семестр, уч. год: Кафедра: Руководитель обучения: Авионика Аэронавигация Системная инженерия Бортовые системы управления 3, весенний, 2011/2012 301 – СУЛА ассистент Копысов Олег Эдуардович ЛЕКЦИЯ № 4 ТЕМА: БОКОВОЕ ДВИЖЕНИЕ. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА Боковое движение (продолжение) Движения ЛА по крену и рысканию происходят с угловыми скоростями ωх и ωу, что приводит к возникновению демпфирующих моментов. При вращении ЛА по крену со скоростью ωх (рис. 4.1, а) на правом крыле угол атаки увеличивается, а на левом – уменьшается. Это приводит к изменению подъемных сил крыльев и, как следствие, к демпфирующему моменту крена M Х Х , где х0 М Х M Х ( )0 . Одновременно происходит изменение сил лобового сопротивления х0 Х (рис. 4.1, б) на величину +ΔХ для правого крыла и на величину –ΔХ для левого крыла. Изменение сил лобового сопротивления приводит к появлению демпфирующего М момента рыскания M Х Х , где M уХ0 ( Y )0 . у0 Х При вращении ЛА со скоростью рыскания ωY на правое крыло воздушный поток набегает с большей скоростью, чем на левое (рис. 4.1, в), и появляется разность сил лобового сопротивления, что приводит к появлению демпфирующего момента М рыскания M Y Y , где M уY0 ( Y )0 . у0 Y Одновременно из-за разности скоростей набегающих воздушных потоков увеличивается подъемная сила правого крыла и уменьшается на левом крыле, что при- Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 2 М X )0 водит к появлению демпфирующего момента крена M Y Y , где M Y ( x0 x0 Y (рис. 4.1, г). Рисунок 4.1 – Определение моментов статической устойчивости В зависимости от конструкции ЛА могут быть различные соотношения между рассмотренными моментами. Для статически устойчивых ЛА выполняются неравенства: M M X X M Y Y ; x0 x0 x0 X M M X M Y Y . y0 y0 y0 Кроме того, необходимо выполнение определенных соотношений между моментами статической устойчивости крена и пути. Если M M , то при возникновении случайного крена большой x0 y0 момент M раскачивает ЛА, совершающий малые колебания по рысканию и x0 крену. При недостаточном демпфировании в этом случае имеет место неустойчивость типа «голландский шаг». Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 3 Если M M , то возможна неустойчивость типа пространственной x0 y0 спирали. В этом случае наблюдается монотонное одновременное отклонение ЛА по крену и рысканию (штопор). В зависимости от конструкции ЛА момент статической устойчивости пути может быть положительным (центр давления находится за центром масс), равным нулю (ЦД совпадает с ЦМ) и отрицательным (ЦЦ расположен перед ЦМ). Соответственно ЛА называют статически устойчивыми, нейтральными или неустойчивыми в отношении направления путевой скорости. Из проведенного анализа следует, что вследствие скольжения, появляющегося при крене, движения крена и рыскания связаны между собой. При автоматическом управлении автопилот ЛА активно гасит крен и скольжение не успевает заметно развиться. Поэтому при автоматическом управлении ЛА движения крена и рыскания допустимо рассматривать независимо друг от друга. Уравнение движения крена Если ЛА управляется автопилотом и совершает горизонтальный полет с постоянной скоростью, уравнение движения относительно продольной оси ОХ в общем виде представляет равенство I x x M x , где IХ – момент инерции ЛА относительно оси ОХ; Мх = Мх( x ,V , э , H , ) - аэродинамический момент крена. Линеаризованное уравнение движения крена для тех же ограничений, что и для продольного движения ЛА, может быть приведено к виду: I x M x M Э M BX , x0 x0 Э где Δγ – приращение (возмущение) угла; Э – угол отклонения элеронов; МВX – возмущающий момент; Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. (4.1) 4 M X M x ( )0 mxX qSl ; x0 X (4.2) M X M ( )0 mxЭ qSl ; x0 Э Э mxX , mxЭ – коэффициенты момента крена, зависящие от угла отклонения эле- ронов и угловой скорости крена. Уравнение (4.1) может быть представлено в виде: с1 с2 M x где с1 x0 IX M Э ; с2 x0 IX ; с3 1 IX Э с3 M BX , . (4.3) (4.4) Уравнения движения рыскания Уравнения движения рыскания полним для ЛА, управляемого автопилотом и совершающего горизонтальный полет с постоянной скоростью V, вектор которой направлен по оси ОХа, касательной к траектории полета (рис. 4.2) и которой препятствует сила любого сопротивления Ха. Рисунок 4.2 – Движение рыскания летательного аппарата Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 5 Изменение угла траектории Ψ происходит с угловой скоростью разворота ЛА относительно оси ОY (скорость рыскания), которому препятствует аэродинамический момент рыскания Му. Уравнения движения получим, приравняв проекции внешних и инерционных сил на ось ОZа, нормальную к траектории полета, а также внешний и инерционный моменты относительно оси ОY, перпендикулярной плоскости ХZ: mV Z P sin ; I y y M y ; (4.5) y ; , где Z – боковая аэродинамическая сила; Р – сила тяги двигателя; Iу – момент инерции ЛА относительно оси ОYс; , – углы рыскания и скольжения. Уравнения (4.5) могут быть приведены к линеаризованному виду: mV0 Z 0 0; I y y M у0 M у 0y y M у 0Н Н ; y ; (4.6) , где Н – угол отклонения руля направления; Z 0 ( M y M y M y Z ) 0 ; M у 0Y ( P cos )0 ; M у0 ( )0 ; M у 0Н ( )0 . Y Н Нулевые индексы означают, что параметры и производные взяты для выбранного невозмущенного движения. Уравнения системы (4.6) запишем в переменных приращений углов курса и скольжения : I y M у0 M у 0y M у 0Н Н M BY ; mV0 ( ) Z 0 FBZ , (4.7) где M BY , FBZ – возмущающий момент и сила, действующие соответственно Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 6 относительно оси ОYа и вдоль оси OZа. Уравнения системы (4.7) перепишем в виде: b1 b2 b3 Н b4 M BY ; (4.8) b5 b6 FBZ , где b1 M у 0y Iy ; b2 M у0 Iy ; b3 M у 0Н Iy ; b4 1 Iy ; b5 Z 0 mV0 ; b6 1 mV0 . (4.9) Постоянные коэффициенты в (4.9) соответствующие невозмущенному движению, определяются следующим образом: M у 0y mу y qSl; M у0 mу qSl; M у 0Н mу Н qSl; Z 0 cZ qS , (4.10) где q – скоростной напор; S, l – площадь и размах крыльев соответственно. Для большинства режимов полета руль направления устраняет скольжение, т.е. можно считать = 0 и движение рыскания описывается одним уравнением: I y M у 0y M у 0Н Н M BY . (4.11) Заметим, что уравнение (4.11) описывает также движение рыскания нейтрального ЛА, у которого нулевой коэффициент путевой устойчивости, т.е. M у0 =0. Если рассматривать только колебания продольной оси ЛА относительно вектора скорости и пренебречь движением его центра масс под действием боковых сил, то можно считать , и уравнение движения рыскания принимает вид: I y M у 0y M у0 M у 0Н Н M BY , (4.12) b1 b2 b3 Н b4 M BY . (4.13) или, имея в виду (4.9): Передаточные функции летательного аппарата Переменные величины, характеризующие состояние ЛА, являются параметрами регулирования, которые делятся на три группы: Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 7 Регулируемые параметры, которые в процессе ароматического полета ЛА должны поддерживаться постоянными или изменяться по определенным, заранее заданным законам. К ним относятся скорость полета V, угол θ наклона траектории, углы тангажа ϑ, курса ψ и крена γ, и высота полета Н. В некоторых случаях в качестве регулируемых параметров могут быть выбраны производные указанных выше величин. Регулирующие параметры характеризуют перемещения органов управ- ления ЛА. Основными регулирующими параметрами являются углы поворотов: δВ – руля высоты, δН – руля направления, δЭ – элеронов или эквивалентные им параметры. К этой группе относят параметры, определяющие положение органов управления двигателем. Неуправляемые параметры или нагрузки, которые включают возмуща- ющие силы и создаваемые ими моменты При решении задач автоматического управления основные динамические свойства ЛА как объекта регулирования характеризуются его реакциями на изменение управляющих параметров и возмущающих воздействий. Сами реакции определяются законами изменения соответствующих переменных V , , , , , Н . Указанные характеристики можно определить, пользуясь понятием передаточной функции, которая определяется как отношение операторных изображений выходной и входной координат. Получим передаточные функции ЛА для продольного движения на основании уравнений системы (3.10), которые для нулевых начальных условий в операторной форме имеют вид: s 2 ( s ) a s ( s ) a ( s ) a B ( s ) a M BZ ( s ); 1 2 3 4 s ( s ) a5 ( s ) s ( s ) a FBY ( s ). 6 (4.14) Исключим из уравнений (4.14) переменную ( s ) и получим: [ s 2 (a a5 ) s (a a1a5 )]s ( s) a ( s a5 ) B (s ) a ( s a5 )M BZ (s ). (4.15) 1 2 3 4 Положим в (4.15) M BZ ( s ) = 0 и получим передаточную функцию движения Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 8 тангажа по управляющему воздействию: W B ( s) a ( s a5 ) ( s) 3 2 , B ( s) s[ s (a a5 ) s (a a1a5 )] 1 2 (4.16) где знак «минус» означает, что положительному отклонению руля высоты соответствует разворот ЛА по тангажу в отрицательном направлении. Полагая в уравнении (4.15) B ( s ) = 0, получим передаточную функцию движения тангажа по возмущающему воздействию: WM BZ ( s ) ( s) M BZ ( s ) a4 ( s a5 ) . s[ s (a a5 ) s (a a1a5 )] 1 2 2 (4.17) Передаточные функции (4.16), (4.17) перепишем в стандартной форме: (s) K B (TB1s 1) W (s) ; B (s) s[TB2 s 2 2 BTB s 1] B WM BZ ( s ) где K B (s) M BZ ( s ) K (TB1s 1) , s[T s 2 BTB s 1] M B 2 2 B (4.18) a3a5 – коэффициент передачи от управляющего воздействия к a2 a1a5 углу тангажа; K BM a4 a5 – коэффициент передачи от возмущающего воздействия к угa2 a1a5 лу тангажа; TB1 1 – постоянная времени, характеризующая маневренность ЛА по углу a5 тангажа; TB 1 – постоянная времени, равная периоду собственных недемпфиa2 a1a5 рованных колебаний ЛА по тангажу; B a1 a5 – относительный коэффициент демпфирования собственных 2 a2 a1a5 колебаний ЛА по тангажу. Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 9 Имея в виду равенство , аналогично получим передаточную функцию изменения угла наклона траектории ЛА по отношению к управляющему воздействию: W B ( s) a a5 ( s) 3 2 , B ( s) s[ s (a a5 ) s (a a1a5 )] 1 2 которая в стандартной форме записи имеет вид: (s) K B W (s) . B (s) s[TB2 s 2 2 BTB s 1] B (4.19) На ЛА, перемещающийся по искривленной траектории, действует центробежная сила mV и, следовательно, он испытывает нормальные перегрузки n y V / g ( g – ускорение силы тяжести), возникающие при действии на ЛА управляющего воздействия. Величину ny необходимо контролировать и, в случае необходимости, ограничивать. Передаточную функцию изменения перегрузки воздействия представим следующим образом: Wn B ( s ) y n y ( s) B ( s) n y ( s) ( s) n y ( s) W B ( s ), ( s) B ( s) ( s) (4.20) где ny ( s) Vs ( s) / g и, следовательно, получим: Wn B ( s) y n y ( s) B ( s) Vs B W ( s). g (4.21) Передаточную функцию ЛА изменения угловой скорости тангажа от управляющего воздействия получим, имея в виду, что Z , или в операторной форме Z ( s ) s ( s ) и, следовательно: WZ B ( s ) Z ( s ) s ( s ) sW B ( s ). B ( s) B ( s) (4.22) Уравнения рыскания (4.8) структурно идентичны уравнениям продольного движения и различаются они только обозначениями коэффициентов и переменных. Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 10 Следовательно, передаточные функции ЛА по рысканию могут быть записаны по аналогии с передаточными функциями ЛА в продольном движении. Передаточные функции ЛА по рысканию по управляющему и возмущающему воздействиям имеют вид аналогичный (4.18): W Н ( s ) (s) K Н (TН 1s 1) ; Н (s) s[TН2 s 2 2 Н TН s 1] WM BY ( s ) где K Н (s) M BY ( s ) K (TН 1s 1) , s[T s 2 Н TН s 1] M Н 2 2 Н (4.23) b3b5 – коэффициент передачи от управляющего воздействия к b2 b1b5 углу направления; K HM b4b5 – коэффициент передачи от возмущающего воздействия к углу b2 b1b5 направления; TH 1 1 – постоянная времени, характеризующая маневренность ЛА по углу b5 рыскания; TH 1 – постоянная времени, равная периоду собственных недемпфиb2 b1b5 рованных колебаний ЛА по рысканию; H b1 b5 – относительный коэффициент демпфирования собственных 2 b2 b1b5 колебаний ЛА по рысканию. Имея в виду равенство , аналогично (4.19) и (4.22) запишем передаточные функции: Н W (s) K Н (s) ; Н (s) s[TН2 s 2 2 Н TН s 1] WyН ( s ) y (s) M BY ( s ) sW Н ( s ). Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. (4.24) 11 Полагая, что в боковом движении имеется перегрузка управления nZ ( s) V / g , аналогично (4.21) запишем передаточную функцию ЛА по боковой перегрузке от управляющего воздействия: WnZH ( s ) nZ ( s ) Vs W H ( s ). H (s) g (4.25) Для нейтрального по курсу ЛА, имея в виду (4.11), (4.13), передаточные функции по управляющему и возмущающему воздействиям имеют вид: WнН ( s ) (s) K нн ; Н (s) s[Tнн s 1] (s) b4Tнн WMн BY ( s ) где K нн Т нн M BY ( s ) s[Tнн s 1] (4.26) , b3 – коэффициент передачи нейтрального ЛА; b1 1 – постоянная времени нейтрального ЛА. b1 Передаточные функции ЛА для движения крена по управляющему и возмущающему воздействиям в соответствии с (4.3) имеют вид: W Э ( s ) W где K Э ТЭ M BХ (s) KЭ ; Э (s) s[TЭ s 1] (s) с4 K Э (s) M BХ ( s ) s[TЭ s 1] (4.27) , с2 – коэффициент передачи ЛА в его движении по крену; с1 1 – постоянная времени ЛА в его движении по крену. с1 Таким образом, ЛА можно представить в виде динамического звена с передаточными функциями, входными параметрами которых являются управляющие воздействия Э , Н , В , и возмущающие воздействия М В X , М В Y , М В Z , а выходными – параметры движения: ϑ, θ, α, ψ, Ψ, β, ωx, ωy, ωz, ny, nz, H. . Лекция № 4. Боковое движение. Передаточные функции летательного аппарата. 12 Перекрестное взаимодействие продольного и бокового движения До появления современных самолетов с их большими массами и скоростями проблема перекрестных инерционных связей не возникала. Особенности, компоновки и удлиненные обтекаемые геометрические формы новых конструкций самолетов привели к появлению при маневрах самолета различного вида неустойчивости движения. Долгое время динамические характеристики самолетов можно было оценивать, рассматривая упрощенные линейные модели. Однако рост скоростей, высоты полета и улучшение геометрии существенно изменили инерционные характеристики, что, в свою очередь, изменило характеристики устойчивости и управляемости самолета, особенно при маневрах с быстрым изменением угла крена. Такие особенности динамики полета связаны с возникновением перекрестных связей, взаимодействий между параметрами продольного и бокового движения. Все это исключает линеаризацию уравнений динамики и приводит к необходимости решать нелинейные дифференциальные уравнения методами вычислительной техники. Если обратиться к линейным моделям, описывающим продольные и боковые движения самолета, то можно обнаружить сильные и слабые перекрестные связи. Действительно, самыми слабыми связями, которыми пренебрегали при выводе линейных уравнений продольного движения, явились связи, обусловленные изменением плотности воздуха с высотой полета. Если представить себе шкалу частот возможных колебаний, имеющих место при движении самолета, то указанные связи проявятся в области низших частот и их влияние по сравнению с более сильными связями пренебрежимо мало. Причин такого взаимодействия несколько, и все они в какой-то степени влияют на движение самолета. Рассмотрим различные виды перекрестного взаимодействия. Аэродинамическое взаимодействие движений самолета характеризует зависимость коэффициентов аэродинамических моментов бокового движения от параметров продольного движения и главным образом от угла атаки α. При полете со скольжением или наличии больших возмущений действительЛекция № 4. Боковое движение. Передаточные функции летательного аппарата. 13 ный полет самолета имеет сложный характер. Поэтому необходимо учитывать зависимость момента крена Мх не только от угла скольжения и угловых скоростей крена и рыскания, но и от угла атаки. В этом случае вариации угла атаки могут изменить знак момента крена. Для коэффициентов продольного момента при действии значительных возмущений необходимо учитывать влияние скольжения. При учете вышесказанного нарушается принцип разделения системы уравнений на две независимые системы, описывающие продольное и боковое движение. Следующими по интенсивности являются вязи по скорости. Связи по скорости существенны в области длиннопериодических колебаний с низкими частотами. Большое значение на устойчивость движения оказывает кинематическое взаимодействие. Допустим, ось ОХ1 и вектор путевой скорости V сохраняют в пространстве независимое положение и самолет начинает изменять угол крена. Тогда при крене γ = 90° угол атаки α0 переходит в угол скольжения β, а при γ=180° β = 0, α = α0 и т. д. Этот попеременный переход угла атаки в угол скольжения и наоборот приводит к попеременному появлению аэродинамических моментов то по тангажу, то по рысканию, что, в свою очередь, усугубляет перекрестное взаимодействие. В общем случае ось ОХ1 и вектор V при кренении самолета перемещаются и поворачиваются в пространстве самым случайным образом, и зависимости углов α и β носят более сложный характер. И, наконец, в области высших частот колебаний самолета сказывается влияние малой жесткости конструкции и малых моментов инерции. Оценки влияния различного рода перекрестных связей очень удобно проводить с учетом частотного спектра колебательных процессов. Наиболее важным для безопасности полета является инерционное взаимодействие. По мере совершенствования конструкций самолета и улучшения их технических характеристик наблюдается медленное, но верное перераспределение массы самолета. В процессе этого перераспределения все большая доля массы постепенно переходит на фюзеляж, так как крылья становятся все короче и тоньше. Это перемещение массы объясняет изменение соотношений между моментами инерций. По мере концентрации массы вдоль продольной оси самолета осевой момент IХ уменьЛекция № 4. Боковое движение. Передаточные функции летательного аппарата. 14 шается, а осевые моменты относительно осей ОY1, ОZ1 увеличиваются, что создает не поддающийся компенсации момент тангажа. Точное аналитическое решение этого явления получить невозможно, так как система связанных между собой уравнений содержит члены в виде произведений переменных. Тем не менее, применяя упрощающие условия, можно для исследования привлечь линейный анализ. При больших угловых скоростях значение произведения разности осевых моментов инерции на угловые скорости значительно возрастает и влияние инерционного взаимодействия на динамику самолета при выполнении маневра крена весьма существенно. Физический смысл этого явления заключается в том, что появление инерционного момента относительно одной из главных осей инерции неизменно влечет появление моментов инерции относительно двух других связанных осей. Таким образом, движение самолета относительно всех трех главных осей инерции в общем случае становится взаимосвязанным, если вектор угловой скорости разворота самолета не совпадает ни с одной из этих осей. Используя литературные источники, найти графические зависимости коэффициента момента крена от угла отклонения элеронов, зависимости коэффициента момента рыскания от угла скольжения и угла отклонения руля направления, коэффициента боковой силы от угла скольжения. Аналитически получить передаточные функции (4.19), (4.24), (4.26), (4.27) из исходных уравнений динамики ЛА. Ответить на вопросы: Какую роль играет угол поперечного наклона плоскости крыльев? В чем причина возникновения неустойчивых движения ЛА типа «голландский шаг» и «штопор»? Термины для занесения в тезаурус: «голландский шаг», штопор, путевая скорость, статическая аэродинамическая устойчивость, автопилот. Лекция № 4. Боковое движение. Передаточные функции летательного аппарата.