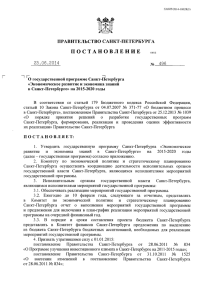
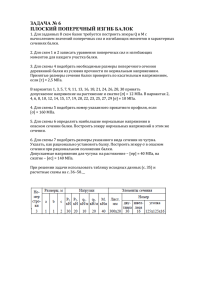
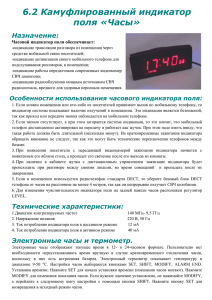
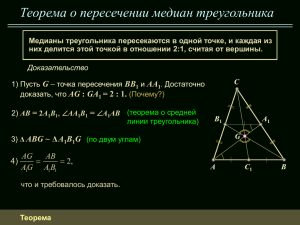
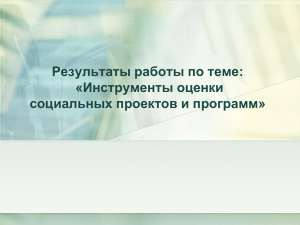
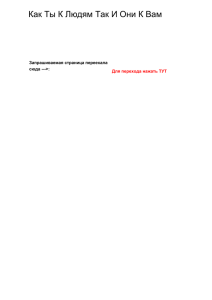
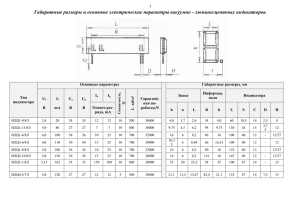
ЛАБОРАТОРНАЯ РАБОТА № 12 Опытная проверка теоремы о взаимности работ. Теорема Бетти Цель работы: экспериментальная проверка теоремы о взаимности работ. Общие сведения Теорема о взаимности работ относится к числу общих теорем сопротивления материалов. Эта теорема вытекает из принципа независимости действия сил и применима ко всем системам, для которых соблюдается этот принцип. Рассмотрим упругую балку на двух опорах в двух состояниях (рис.1). В первом состоянии балка нагружена силой Pi в сечении i (рис. 1, а), а во втором – силой Pk в сечении k (рис. 1, б). а i Pi k I состояние Δki б k i Pk Δik II состояние Рис. 1 Точка «k» под действием силы Pi (I состояние) получит перемещение Δki, а точка «i» под действием силы Pk (II состояние) получит перемещение Δik. Применительно к указанным видам нагружения теорема о взаимности работ запишется следующим образом: Pi ⋅ Δ ik = Pk ⋅ Δ ki 95 (1) Теорема формулируется следующим образом: возможная работа силы первого состояния Pi на перемещении Δik по ее направлению, вызванному силой второго состояния, равна возможной работе силы второго состояния Pk на перемещении Δki по ее направлению, вызванному силой первого состояния. Эта теорема приобретает большую общность, если учесть, что под силами Pi и Pk можно понимать обобщенные силы, а под Δik, Δki – обобщенными перемещениями. Приложим во II состоянии балки сосредоточенный момент Mk (рис. 2, б), тогда вместо линейного перемещения Δki необходимо рассматривать угол поворота ϕki (рис. 2, а). ϕki а К б Мk К Pi i I состояние i k Pk Δik II состояние Рис. 2 Теорема о взаимности работ запишется в этом случае так: Pi ⋅ Δ ik = M k ⋅ ϕki (2) Опытная проверка теоремы о взаимности работ по формуле (2) проводится на балке, имеющей консоль длиной «a» на правом конце и вертикальный стержень длиной «b» на левой опоре (рис. 3). Вертикальный стержень «b» жестко связан с балкой и перпендикулярен к ней. 96 ϕ ki а b С i Pi I состояние a б P С i II состояние Δik Рис. 3 Порядок выполнения работы 1. Замерить длину консоли «a» и расстояние «b» между осью балки и острием индикатора (рис. 3, а). 2. В ненагруженном состоянии балки записать показание nk0 по шкале индикатора, установленного на стержне «b». 3. Подвесить груз Pi в сечении i и записать новое показание nk1 индикатора. 4. Вычислить разность показаний индикатора для нагруженного и ненагруженного состояний балки Δnk = nk1 − nk0. 5. Определить угол поворота сечения «k» − ϕ ki = Δnk , b так как tgϕki≈ϕki ввиду малости угла. 6. В ненагруженном состоянии балки записать показания ni0 по шкале индикатора, установленного в сечении «i». 7. Приложить в сечении А груз P, который образует момент Мк = Р⋅а и записать новое показание индикатора ni1. 97 8. Вычислить разность показаний индикатора: Δik = Δni = ni1 − ni0. 9. Определить величины произведений Pi⋅Δik и Мк⋅ϕki. 10. Определить процент расхождения между указанными величинами. 11. Оформить отчет по прилагаемой форме. 98 ЛАБОРАТОРНАЯ РАБОТА № 12 Отчет Опытная проверка теоремы о взаимности работ. Теорема Бетти Цель работы:……………………………………………………………………..….. …….…………….…………………………………………….……………………… Измерительные приборы………………………………………………….. Схема нагружения балки и расположения приборов I состояние II состояние Длина консоли a = ……………см. Длина стержня b = ……………см. Результаты опыта I состояние II состояние Нагрузка Pi = ……..Н Нагрузка P = ……..Н Показания индикатора «k» Момент Мк = Р⋅а =……..кН⋅м nk0 =…………… nk1 =…………… Показания индикатора «i» Δnk =…………... ni0 =…………… Угол поворота сечения «k» ni1 =…………… ϕki = Δnk = ………………… b Δni =…………... Перемещение сечения i Δik =………см =……….м 99 Величина возможных работ Аik = Pi⋅Δik =…………………………. Аki = Мк⋅ϕki =………………………… Расхождение между возможными работами: δ= Αik − Α ki ⋅100% = ………………..% Αik Выводы по работе…………………………………………………….……….…….. ………………………………………………………………………….………....…… ………………………………………………………………………….……...………. ………………………………………………………………………….………...……. Отчет принял …………………………….. 100