Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ОРЕНБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет информационных технологий
Кафедра вычислительной техники
КУРСОВОЙ ПРОЕКТ
по курсу «Микропроцессорные системы»
Разработка микропроцессорной системы управления инкубатора
на основе микроконтроллера 8051
ГОУ ОГУ 230101.5108.07 ПЗ
Руководитель проекта
_________________ Бурькова Е. В.
"_____"__________________2008г.
Исполнитель
студент гр. 04 ВМК-1
__________________Игнатенко А.А.
"_____"__________________2008г.
Оренбург 2008
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ОРЕНБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет информационных технологий
Кафедра вычислительной техники
Задание на курсовой проект
Разработка микропроцессорной системы управления инкубатора
на основе микроконтроллера 8051
Исходные данные:
Разработать:
Устройство должно осуществлять проверку
температуры и влажности в инкубаторе, а
также сигнализировать об их отклонениях.
Разработка устройства осуществляется на основе микроконтроллера 8051.
Требования к устройству:
1) Поддержание температуры 380 в течении 5
часов, затем температуры 280 в течении 30
минут, так повторять;
2) Поддерживать влажность 50% постоянно;
3) Проверка температуры и влажности производится с инервалом в 5 минут.
1) функциональная схема устройства;
2) принципиальная электрическая схема
устройства;
3) текст программы управления устройством.
Дата выдачи задания "_____"_______________200__г.
Руководитель
Бурькова Е. В.
Исполнитель
студент группы 04 ВМК-1
Игнатенко А.А.
Срок защиты проекта "_____"______________200__г.
Содержание
Введение.................................................................................................................. 5
1 Формулирование требований к микропроцессорной системе ....................... 7
2 Системно-алгоритмическое проектирование................................................... 9
3 Проектирование аппаратных средств ............................................................. 11
3.1 Выбор микроконтроллера ............................................................................. 11
3.2 Разработка структурной схемы устройства................................................. 11
3.3 Разработка функциональной схемы устройства ......................................... 14
3.4 Разработка принципиальной электрической схемы устройства ............... 15
4 Проектирование программных средств .......................................................... 18
4.1 Формализация задачи .................................................................................... 18
4.2 Составление программы................................................................................ 18
4.3 Выбор среды программирования ................................................................. 20
Заключение ........................................................................................................... 21
Список использованной литературы ................................................................. 22
Приложение А. Функциональная схема МПС .................................................. 23
Приложение Б. Принципиальная электрическая схема МПС ......................... 24
Приложение В. Перечень элементов.................................................................. 25
Приложение Г. Листинг программы .................................................................. 26
Лист
4
Введение
Во всех видах человеческой деятельности существуют области, где не
обойтись без определенных видов измерений - очень часто это температурные измерения, например в печах, холодильниках, парниках, технологических помещениях и т.д. Кроме температуры, часто измеряют давление, силу, пространственное смещение, механическое напряжение, и т.д. – список
огромный! Для выполнения данных видов измерений всё чаще применяют
электронно-вычислительную аппаратуру на основе контроллеров, так как её
использование обеспечивает более точное управление приборами и исключает возможность появления ошибок, котрые обусловлены человеческим
фактором.
В зависимости от стоимости и габаритов устройства, которым требуется управлять, определяются и требования к контроллеру. Если объект
управления занимает десятки метров по площади, как, например, автоматические телефонные станции, базовые станции сотовых систем связи или радиорелейные линии связи, то в качестве контроллеров можно использовать
универсальные компьютеры. Управление при этом можно осуществлять через встроенные порты компьютера (LPT, COM, USB или ETHERNET). В такие компьютеры при включении питания заносится управляющая программа, которая и превращает универсальный компьютер в контроллер.
Использование универсального компьютера в качестве контроллера
позволяет в кратчайшие сроки производить разработку новых систем связи,
легко их модернизировать (путём простой смены программы) а также использовать готовые массовые (а значит дешёвые) блоки.
Контроллеры требуются не только для больших систем, но и для малогабаритных устройств таких как радиоприёмники, радиостанции, магнитофоны или сотовые аппараты. В таких устройствах к контроллерам предъявляются жёсткие требования по стоимости, габаритам и температурному
диапазону работы. Этим требованиям не могут удовлетворить даже промышленные варианты универсального компьютера. Приходится вести разработку контроллеров на основе однокристальных ЭВМ, которые в свою
очередь получили название микроконтроллеры.
Любые устройства, в том числе и устройства связи, радиоавтоматики
или аудиовизуальной аппаратуры требуют присутствия в своем составе
устройства управления (контроллера). Контроллеры требуются практически
во всех предметах и устройствах, которые окружают нас.
В данном курсовом проекте поставлена задача на разработку устройства упраления инкубатором на основе микроконтроллера 8051. Эта задача
является еще одним примером применения микроконтроллера в качестве
управляющего устройства.
Также следует отметить тот факт, что функциональность проектируемого устройства может быть значительно расширена за счёт программиро-
Лист
5
вания микроконтроллера без изменения электрической схемы самого
устройства.
Пояснительная записка включает в себя 4 главы. Краткая характеристика глав курсового проекта представлена ниже.
Глава 1 – Формулирование требований к микропроцессорной системе. В данной главе формулируются системные требования к разрабатываемой микропроцессорной системе, которые заключаются в определении
набора требований пользователяи создание вытекающей из него спецификации.
Глава 2 – Системно-алгоритмическое проектирование. В этой части
пояснительной записки осуществляется разбиение микропроцессорной системы на аппаратную и программную части, то есть распределение функций
из функциональной спецификации между аппаратной и программной частями. Также в этой главе разрабатывается общая структура и алгоритмы функционирования устройства.
Глава 3 – Проетирование аппаратных средств. Здесь осуществляется
выбор микроконтроллера, на основе которого будет строиться устройство.
Разрабатывается структурная схема устройства, а также приводится описание выбранной элементной базы. Затем происходит составление функциональной схемы устройства, на основе которой уже строится принципиальная
электрическая схема устройства и перечень её элементов.
Глава 4 – Проектирование программных средств. В данной главе составляется алгоритм выполнения программы, выбор используемого языка
программирования, компиляция и трансляция программы.
Лист
6
1 Формулирование требований к микропроцессорной системе
В данном курсовом проекте требуется разработать принципиальную
схему и текст программы системы управления инкубатором на основе микроконтроллера 8051.
Для того чтобы составить функциональную спецификацию МПсистемы нужно определить требования, которые предъявляются со стороны
пользователя к разрабатываемому устройству. А после этого уже можно будет определить какие функции должно выполнять устройство. Для ясности
следует пояснить, что требования пользователя – это то, что он хочет получить от системы и что она должна уметь делать /6/.
Опираясь на всё вышесказанное можно сделать вывод о том, что со
строны пользоваля к разрабатываемому устройству можно выделить следующие требования:
1) включить систему обогрева камеры и систему поддержания влажно-сти в течение 5 часов поддерживать температуру 380с, затем 30
ми-нут поддерживать температуру 280с, так повторять;
2) влажность 50% поддерживается постоянной;
3) обеспечить измерение значений температуры и влажности с периодичностью 5 минут;
4) вывод на дисплей значений температуры и влажности;
5) вывод текущего времени;
6) в случае отклонения температуры /влажности от заданной на 5%
за-жечь светодиоды, отвечающие за температуру и влажность;
7) в случае отклонения температуры до 200с подать короткий звуковой сигнал;
8) в случае появления сигнала с датчика движения (вылупление цыплёнка) подать звуковой сигнал в течение 1 минуты частотой 1 кГц..
Исходя из требований пользователя к системе, можно составить
функциональную спецификацию микропроцессорной системы, представленную в таблице 1.1.
Таблица 1.1 – Функции МПС
Функция
1
Вход
Устройство ввода
2
Устройство вывода
3
Измерение температуры
датчик
ЖК-дисплей
Измерение влажности
Обнаружение/сигнализация
движения
датчик
ЖК-дисплей
датчик
динамик
Лист
7
Продолжение таблицы 1.1
1
Выход
Отображение времени
Анализ отклонения
t0/влажности на 5%
Оповещение об отклонении
t0/влажности на 5%
2
3
-
ЖК-дисплей
-
-
-
Светодиод
Анализ отклонения t0 до 200
-
-
Оповещение об отклонении
t0 до 200
-
Динамик
-
-
-
-
Управление вкл./выкл. системой обогрева и контроля
влажности
Измерение временных интервалов
Таким образом, используя представленную выше таблицу, можно
сделать вывод о том, что в состав разрабатываемой микропроцессрной системы в обязательном порядке должны входить следующие устройства,
обеспечивающие взаимосвязь с внешним окружением:
1) ЖК-дисплей;
2) Светодиод;
3) Датчики;
4) Динамик.
Лист
8
2 Системно-алгоритмическое проектирование
В данной главе курсового проектирования потребуется распределить
какие из функций фукнциональной спецификации будут выполняться аппаратной частью, а какие программной. Также на этом этапе помимо разбиения микропроцессрной системы на программную и аппаратную части нужно
будет разработать её общую структуру /6/.
Но вначеле следует отметить преимущества и недостатки программной реализации по сравнению с аппаратной, исходя из которых можно будет произвести разделение функций.
Преимущества программной реализации:
1) широкие “интеллектуальные” функциональные возможности;
2) осуществимость перенастройки микропроцессорной системы на
новые условия, задачи, объекты и т.д. путем изменения только программного обеспечения.
Недостатки программной реализации:
1) большее время выполнения функций (или меньшее быстродействие), обусловленное последовательным методом выполнения
программы;
2) сложность программной реализации функций непосредственного
сопряжения с реальными объектами;
3) ограниченный объем памяти программ и данных.
Используя, представленные выше преимущества и недостатки, а также функциональную спецификацию, произведём разделение функций /9/.
Функции, выполняемые программной частью:
1) Отображение времени;
2) Отображение температуры и влажности;
3) Проверка отклонении температуры и влажности на 5%;
4) Проверка отклонения температуры до 200;
5) Включение динамика;
6) Зажигание светодиода;
7) Выработка управляющих сигналов для коррекции температуры и
влажности.
Функции, выполняемые аппаратной частью:
1) Измерение влажности, температуры и обнаружение движения;
2) Подача звукого сигнала;
3) Индикация параметров системы;
4) Преобразование аналоговых сигналов от датчиков в цифровые сигналы;
5) Замер временных интервалов.
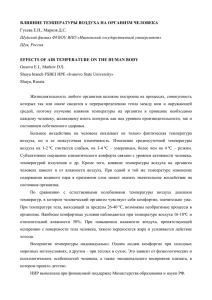
Теперь нужно составить общую структуру функционирования аппаратной части. Данная структура представлена на рисунке 2.1.
Лист
9
Устройства вывода
ЖК-дисплей
Светодиод
Динамик
Датчик
температуры
АЦП
Датчик
влажности
АЦП
Датчик движения
ЦАП
Устройство
отопления
ЦАП
Устройство
вентилирования
Микроконтроллер
АЦП
Рисунок 2.1 – Структурная схема аппаратной части МПС
Лист
10
3 Проектирование аппаратных средств
После того, как было принято компромиссное решение о программной и аппаратной реализации можно приступать к проектированию аппаратной части, которая включает в себя разработку структурной, функциональной, принципиальной электрической схем. Но прежде, чем начать построение схем нужно осуществить выбор микроконтроллера, на базе которого будет строиться микропроцессорная система, так как структурная схема
устройства, состав МПС во многом зависит от выбора микроконтроллера.
При выборе микроконтроллера необходимо рассматривать различные семейства, но и выбрать конкретный тип внутри семейства.
3.1 Выбор микроконтроллера
В основу микропроцессорной системы ляжет микроконтроллер
ADuC812BS. Процессор ADuC812 является клоном Intel 8051 со встроенной периферией /3/. Основные характеристики:
- рабочая частота 11.0592 МГц;
- 8-канальный 12-битный АЦП со скоростью выборок 200 К/с (в режиме прямого доступа к памяти) – в нашем случае получение информации с датчиков;
- два 12-битных ЦАП (код-напряжение) – понадобится для управления
освещением и двигателями;
- внутренний температурный сенсор;
- 640 байт программируемого E2PROM со страничной организацией
(256 страниц по 4 байта) – понадобится для хранения программы управления;
- 256 байт внутренней памяти данных;
- адресное пространство 16 Мб;
- режим управления питанием;
- асинхронный последовательный ввод-вывод;
- интерфейс I2С;
- три 16-битных таймера-счетчика и сторожевой таймер WatchDog –
будут необходимы для выдерживания двадцатисекундной задержки.
3.2 Разработка структурной схемы устройства
Определившись с выбором микроконтроллера, и зная его функциональные возможности, можно приступить к составлению структурной схемы
проектируемого устройства.
Основной задачей микропроцессорной системы является измерение и
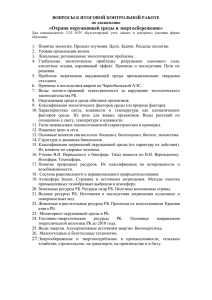
управление температурой и влажностью окружающей среды. Таким образом, понадобится использовать датчик температуры и влажности. Воспользуемся цифровым датчиком PMU_G, который измеряет и температуру и
Лист
11
влажность. На рисунке 3.2.1 представлен внешний вид и разъем подключения датчика.
Рисунок 3.2.1 – Внешний вид и разъем подключения датчика PMU_G
Сменный цифровой ceнсоp «PMU_G» снабжен апробированным и
протестированным влагочувствительным элементом FE 09/4. Чувствительный элемент предназначен для измерения влажности воздуха и защищен
фильтром PTFE. Фильтр состоит из пористого материала, пропускающего
пары воды и защищающего чувствительный элемент от грязи, пыли и других
вредных агентов.
Электронная часть и соединительные контакты задней части модуля
покрыты прессованным пластиком для придания им водостойкости. Электрический разъем имеет класс защиты IP40.
Емкостной чувствительный элемент, созданный с использованием
тонкопленочной технологии, состоит из основания, в которое впаяны электроды и гигроскопичного полимера, накрывающего их. Гигроскопичный полимерный слой абсорбирует молекулы воды из окружающего его воздуха
или испаряет их, тем самым, изменяя емкость конденсатора.
Электронные компоненты получают сигнал, пропорциональный значению влажности сопоставляют их со значениями калибровки, хранимыми в
их памяти и передают откалиброванные значения через разъем по цифровому протоколу ASCII.
Головка датчика также снабжена температурным датчиком Pt 1000
1/3D1N, который используется и для измерения температуры воздуха, и для
температурной компенсации при измерениях влажности посредством
PMU_G. Основные характеристики:
1. Влажность
1.1. Измеряемый диапазон 0... 100% отн. влажности;
2. Точность измерений
2.1. при 10...90%отн. влажности ± 1.5%;
2.2. при<10% и >90% отн. влажности ±1,5%+0,8% RH дополнительно на каждый процент RH;
3. Температура
Лист
12
3.1. Измеряемый диапазон -25... 70 "С;
3.2. Точность измерений ±0,2°С при 25°С; ±0,3°С(<15оС, >30°С).
Так же для определения вылупления цыпленка используется датчик
движения. Воспользуемся датчиком DMS-4. Технические характеристики:
- Напряжение питания 9…12 вольт;
- Потребляемый ток не более 20 мА;
- Минимальный размер регистрируемого объекта 0.3 м;
- Диапазон скоростей движения регистрируемых объектов
от 0.1 до 10 м/сек;
- Температура окружающей среды от –25 до + 60 град;
- Дальность действия: обнаружение человека до 6 м, обнаружение
автомобиля до 30 м;
- Рабочая частота около 900 мГц;
- Мощность излучения не более 0.5 – 1 мвт.
Так как микроконтроллер – это цифровое устройство, то напрямую
работать с напряжением от датчиков, которое является аналоговой величиной, он работать не сможет. Значит нужно будет использовать аналогоцифровой преобразователь, но в предыдущем пункте было сказано, что
ADuC812BS имеет встроенный 8-канальный 12-разрядный АЦП HI562-8 фирмы Hitachi /3/.
Приведём основные характеристики АЦП:
- разрядность 12 бит;
- быстродействие 0.4 мкс;
- DNL ±0,018 %;
- INL ±0,018 %;
- Ucc 5/-15 В;
- Icc 15/48 мА;
- выходное напряжение UREF 10.24 В;
- выходной ток Iout 3-7 мА;
- температура Tamb -60÷+85 OC;
- корпус 210B.24-1 (24-pin CerDIP).
Исходя из сказанного, можно сделать вывод о том, что необходимость во
внешнем АЦП отпадает.
Как будет поступать сигнал об измеренной температуре и влажности, мы
разобрались. Но нам ещё потребуются устройства отображения информации об
измеренных величинах. В качестве устройства отображения данных будет использоваться ЖК-дисплей WH16028-NGK-CP, который входит в состав стенда
SDK 1.1, построенные также на основе микроконтроллера ADuC812BS. В таблица 3.2.1 приведены основные характеристики данного ЖКИ /9/.
Лист
13
Таблица 3.2.1 – Характеристики ЖКИ WH16028-NGK-CP
Также в состав системы будут включены два светодиода красного
цвета, которые будут сигнализировать об изменении температуры и влажности. Ещё одним аппаратно реализуемым устройством будет являться динамик, который будет сигнализировать об отклонении температуры на 20º, и
об вылуплении цыпленка из яйца.
3.3 Разработка функциональной схемы устройства
Опираясь на структурную схему, составляем функциональную схему
устройства. Функциональная схема проектируемого устройства представлена в приложении А.
Мы будем использовать ПЛИС MAX 3064 (DD1). В своем составе
она имеет два параллельных порта и порты управления консолью. ПЛИС используется в нашем устройстве, поскольку эта схема предназначена для взаимодействия микроконтроллера с периферийными устройствами. При графическом обозначении ПЛИС на схеме все её вывод указываться не будут, а будут
проставлены только те, которые нам необходимы. А именно: сигнал на ЖКИ
поступают в ПЛИС, по линиям D9-D19. На светодиоды сигнал поступает по
линиям D7,D8. На динамик сигнал поступает по линиям D6.
Сигнал с датчика температуры и влажности попадает на порт P1.0, c
датчика движения на P1.1. Через порты P1.2 и P1.3 подаются сигналы управления системы обогрева и влажности. В таблице 3.3.1 представлено распределение разрядов портов МК за внешними устройствами.
Лист
14
Таблица 3.3.1 - Распределение разрядов портов МК за внешними устройствами
Устройство
Порт
датчик движения
МК P1.1
датчик температуры/влажности
МК P1.0
система обогрева
МК P1.2
система увлажнения
МК P1.3
ЖК дисплей
ПЛИС D9-D19
светодиоды
ПЛИС D7, D8
динамик
ПЛИС D6
3.4 Разработка принципиальной электрической схемы устройства
Построение функциональной электрической схемы будем осуществлять, используя функциональную схему и с помощью специальных выводов
соединяем два корпуса: микроконтроллер ADu812BS (DD1), ПЛИС
MAX3064 (DD2).
В данном разрабатываемом устройстве используется блок питания,
который формирует следующие значения напряжений: +5В, +15В, 0В, -15В.
Выпрямительный
мост 4 А
~
12 В
-
Трансформатор 220 В
50Вт
440 Ом
+5 В
Предохранитель
1,85 А
+
+15 В
+
12 В
С1
~
Стабилитрон
5,1 В
0В
+
С2
Предохранитель
1,85 А
- 15 В
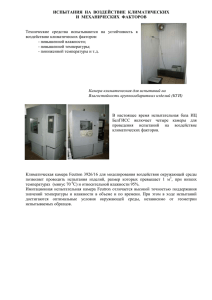
Рисунок 3.4.1 – Электрическая схема блока питания
Блок питания построен на основе трансформатора мощностью 500Вт,
подключенного к сети переменного напряжения 220В (рисунок 3.4.1). С обмоток трансформатора переменное напряжение подаётся на диодный выпрямительный мост, формирующий постоянные напряжения +15В, -15В, используя предохранители и конденсаторы С1 и С2. А затем, подсоединяя к
цепи +16 стабилитрон на 5,1 В и сопротивлением 440 Ом формируется
напряжения +5В /1/.
Также в устройство входит электрическая схема подключения датчика температуры и влажности. Эта схема представлена на рисунке 3.4.2
Лист
15
+5V
R6
1,5кОм
Vcc
PMU_G
TxD
GND
Рисунок 3.4.2 – Электрическая схема подключения датчика температуры и влажности.
Схема подключения датчика движения представлена на рисунке 3.4.3
Рисунок 3.4.3 – Схема подключения датчика движения
Датчик состоит из СВЧ генератора на транзисторе КТ371 (КТ368),
предварительного усилителя на транзисторе КТ3102 (КТ315) и компаратора
на микросхеме К554СА3. СВЧ сигнал, вырабатываемый генератором, излучается штыревой антенной и после отражения от движущегося объекта получает сдвиг по частоте, равный DFотр = 2*V*Fизл/C, где V – скорость движения объекта, С – скорость света, F – частота передачи. Отраженный от
объекта сигнал принимается той же самой антенной и в СВЧ генераторе, который в этом случае работает как приемник прямого преобразования, преобразуется в сигнал низкой (инфразвуковой) частоты. Фактически генератор
работает как автодин. Полученные низкочастотные колебания усиливаются
предварительным усилителем и далее в компараторе преобразуются в прямоугольные импульсы. При отсутствии отраженных сигналов напряжение на
Лист
16
выходе компаратора имеет высокий уровень. Подстроечный конденсатор в
схеме СВЧ генератора служит для установления частоты, равной резонансной частоте антенны (подбирается по максимуму чувствительности датчика).
Полный перечень всех используемых в системе микросхем и элементов указан в приложении В. Принципиальная электрическая схема представлена в приложении Б.
Лист
17
4 Проектирование программных средств
Закончив проектирование аппаратной части разрабатываемого
устройства, можно приступить к разработке программного обеспечения для
проектируемой микропроцессорной системы.
4.1 Формализация задачи
На этом этапе проектирования программы для устройства необходимо определиться с требованиями, которые к ней предъявляются, и какие
функции она должна выполнять в составе микропроцессорной системы и
при каких условиях.
Требования к программному обеспечению устройства:
1) включить систему обогрева камеры и систему поддержания влажности в течение 5 часов поддерживать температуру 380с, затем 30
минут поддерживать температуру 280с, так повторять;
2) влажность 50% поддерживается постоянной;
3) обеспечить измерение значений температуры и влажности с периодичностью 5 минут;
4) вывод на дисплей значений температуры и влажности;
5) вывод текущего времени;
6) в случае отклонения температуры /влажности от заданной на 5%
зажечь светодиоды, отвечающие за температуру и влажность;
7) в случае отклонения температуры до 20С подать короткий звуковой сигнал;
8) в случае появления сигнала с датчика движения (вылупление цыплёнка) подать звуковой сигнал в течение 1 минуты частотой 1 кГц.
Также выделим и функции, которые возлагаются на программу, загружаемую в микроконтроллер:
1) Отображение времени;
2) Отображение температуры и влажности;
3) Проверка отклонении температуры и влажности на 5%;
4) Проверка отклонения температуры до 200;
5) Включение динамика;
6) Зажигание светодиода;
7) Выработка управляющих сигналов для коррекции температуры и
влажности.
4.2 Составление программы
После того, как были определены все требования, предъявляемые
требования к программному средству, и выполняемые им функции, можно
приступить к проектированию схемы алгоритма программы. Конечно схема
работы программного средства была приведена в предыдущих пунктах, но
Лист
18
она была укрупнённая. А наша задача сейчас составить более детальную
схему алгоритма программы.
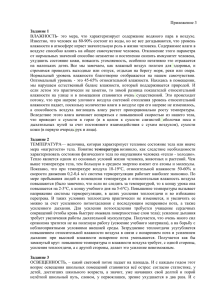
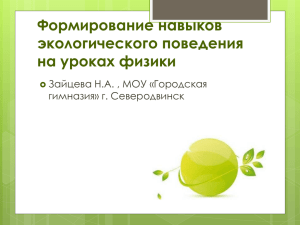
Схема алгоритма программы для устройства измерения и анализа веса представлена на рисунке 4.2.1.
Начало
A
Пока не прошло
300 или 30 мин
Вывод
времени на
ЖК-дисплей
да
Прошло 5 мин
Ввод данных с
датчиков и
отображение на
дисплее
нет
Отклонение t и вл. на
5%
Зажигание светодиодов,
подача упр-их сигналов
нет
t<20
нет
Зафиксировано
движение
нет
Прошла 1 мин и
дин. вкл.
да
да
Подача звукового и
управляющего
сигнала
да
Включение
динамика
да
Выключение
динамика
нет
А
Изменяем
время цикла и
номинальное
значение t
Рисунок 4.2.1 – Схема алгоритма программы для МПС
Лист
19
4.3 Выбор среды программирования
Программное средство было решено реализовывать с помощью инструментальных средств фирмы Keil Software. Поскольку данный пакет было достаточно детально изучен на лабораторных занятиях. Также следует
отметить, что представленная фирма поддерживает все стадии разработки
приложения: создание исходного файла на С или Ассемблере, трансляцию,
исправление ошибок, линкование объектных файлов, тестирование приложения. В пакете Keil Software содержатся практически все необходимые
средства разработки для микроконтроллера 8051 /9/. Компилятор С51 поддерживает стандарт ANSI С, разработан специально для 8051 семейства и
позволяет создавать программы на языке С (который является наиболее
освоенным разработчиком данного курсового проекта), сохраняя эффективность и скорость оптимизации Ассемблера. Расширения, включенные в инструментальные средства Keil, обеспечивают полный доступ к ресурсам
микроконтроллеров 8051.
Лист
20
Заключение
В ходе выполнения данного курсового проекта было разработано
устройство, осуществляющее контроль температуры и влажности в инкубаторе. Основной же идеей этого проектирования являлось получение начальных навыков проектирования микропроцессорной системы, которое заключается в поэтапной реализации разрабатываемого устройства.
В процессе разработки были решены следующие задачи:
1) Определили функции, реализуемые аппаратной и программной частями устройства;
2) Выбрали микроконтроллер;
3) Подобрали дополнительные устройства и элементы, необходимые
для разработки устройства;
4) Создали структурную схему;
5) Создали на основе структурной схемы функциональную;
6) Создали на основе функциональной схемы принципиальную электрическую;
7) Разработали программное обеспечение для микропроцессорной системы.
Логическим завершением данного курсового проектирования можно
считать окончание разработки программного обеспечения, которая осуществляет в данной разработке функции взаимосвязи всех элементов аппаратной части устройства между собой.
Лист
21
Список использованной литературы
Угрюмов Е. П. «Цифровая схемотехника». – СПб.: БХВ-Петербург,
2004. -528 с.: ил.
2) Справочник. Микроконтроллеры: архитектура, программирование, интерфейс. Бродин В.Б., Шагурин М.И.М.:ЭКОМ, 1999.
3) Нефедов А. В., Нефедова М. Ю. «Зарубежные интегральные микросхемы»: изд. Энергоатомиздат, 1995 г.
4) Андреев Д.В. Программирование микроконтроллеров MCS-51: Учебное
пособие. - Ульяновск: УлГТУ, 2000.
5) Справочник по цифровой схемотехнике / В.И. Зубчук, В. П. Сигорский,
А. Н. Шкурко. – К. Техника, 1990. – 448 с.
6) М. Предко. Руководство по микроконтроллерам. Том I. Москва: Постмаркет, 2001.
7) Интегральные микросхемы: Справ. / Б. В. Тарабрин, Л. Ф. Лукин,
Ю. Н. Смирнов и др.; Под ред. Б. В. Тарабрина. – М.: Радио и связь,
1985.
8) «Микропроцессоры и микропроцессорные комплекты интегральных
схем», под редакцией Шахнова В. А.: изд. Радио и связь, 1988 г.
9) Бурькова Е.В. Микропроцессорные системы. ГОУ ОГУ. 2005.
10) Новаченко И. В., Петухов В. М., Блудов И. П., Юровский А. В. «Микросхемы для бытовой радиоаппаратуры»: изд. Радио и связь, 1989 г.
1)
Лист
22
Приложение А
(обязательное)
Функциональная схема МПС
Лист
23
Приложение Б
(обязательное)
Принципиальная электрическая схема МПС
Лист
24
Приложение В
(обязательное)
Перечень элементов
Лист
25
Приложение Г
(обязательное)
Листинг программы
#include "ADuC812.h"
#include "max.h"
#include "KB.h"
#include "i2c.h"
#include "lcd.h"
#include "rtc.h"
void Buzz(void)
{
unsigned char i;
unsigned short dur;
for(dur = 0; dur < 500; dur++)
{
WriteMax(ENA,0x24);
for(i=0; i < 2; i++)continue;
WriteMax(ENA,0x20);
for(i=0; i < 2; i++)continue;
}
}
extern int sprintf (char *, const char *, ...);
extern int abs (int val);
int T,VL,DV,kol,Tmin,Tmax;
TIME Opros,iztemp;
TIME vrem;
char outstr[16];
unsigned int ch;
int i;
unsigned char diap;
void FROM_TM0(void) interrupt 1
{
TH0=0xDC;
TL0=0x31;
kol++;
if (kol==100)
{
kol=0;
TR0=0;
GetTime(&vrem);
sprintf
(outstr,"%d:%d:%d
",
(int)vrem.hour,
(int)vrem.min,
(int)vrem.sec);
LCD_GotoXY(0,0);
LCD_Type(&outstr);
if
(((vrem.min*60+vrem.sec)(Opros.min*60+Opros.sec))==10)
{
LCD_GotoXY(0,1);
sprintf (outstr,"Temp %d Vlag %d",
(int)T, (int)VL);
LCD_Type(&outstr);
Opros=vrem;
ch=0;
if ((VL<=47)||(VL>=52)) {ch=ch | 1;}
if ((T<=Tmin)||(T>=Tmax)) {ch= ch | 2;}
if (T<=20) {Buzz();}
if (DV==1) {Buzz(); DV=0;}
WriteMax(SV,ch);
}
if ((vrem.min-iztemp.min)==diap)
{
iztemp=vrem;
if
(diap==1)
{diap=2;Tmin=36;Tmax=40;T=38;}
else
{diap=1;T=28;
Tmin=26;
Tmax=30;}
}
TR0=1;
}
}
void SetVector(unsigned char xdata
*Address, void *Vector)
{
unsigned short xdata *TmpVector;
*Address = 0x02;
TmpVector = (unsigned short xdata *) (Address+1);
*TmpVector = (unsigned short) Vector;
}
void main(void)
{
unsigned char s;
Лист
26
T=38;
Tmin=36;
Tmax=40;
diap=2;
VL=50;
DV=0;
s=0;
kol=0;
InitLCD();
SetVector(0x200B,(void *) FROM_TM0);
TMOD=1;
ET0=1;
EA=1;
TH0=0xDC;
TL0=0x31;
GetTime(&Opros);
iztemp=Opros;
TR0=1;
while (1)
{
while (ScanKBOnce(&s)==0) {}
if (s=='1') {T-=5;}
if (s=='2') {T+=5;}
if (s=='4') {VL-=5;}
if (s=='5') {VL+=5;}
if (s=='0') {DV=1;}
for (i=0;i<20000;i++)
{Delay();}
}
}
Лист
27