Ермоленко А.В. Применение преобразования Фурье для
реклама

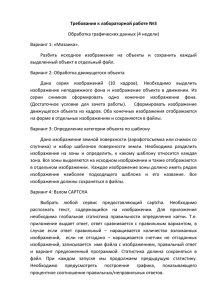
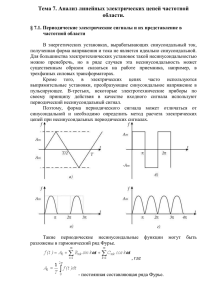
ПРИМЕНЕНИЕ ПРЕОБРАЗОВАНИЯ ФУРЬЕ ДЛЯ ФОРМИРОВАНИЯ ОПИСАНИЯ ОБЪЕКТОВ ПРИ НЕЙРОСЕТЕВОМ АНАЛИЗЕ ОБРАЗОВ Ермоленко А.В., аспирант Калужский Филиал Московского Государственного Технического Университета им. Н.Э. Баумана тел.: 8-910-916-12-53, e-mail: ermolenko@rambler.ru В практических приложениях нередко возникает задача анализа и классификации изображений, содержащих объекты, которые необходимо изучать и рассматривать более детально. Системы, осуществляющие решение подобного образа задач, получили название систем компьютерного зрения. Существуют различные методы упрощения и описания изображений при помощи ЭВМ. Так, одной из важнейших задач систем компьютерного зрения является сегментация визуального изображения. Сегментация является одним из способов группировки пикселей в сцене. Она проводится с целью разбиения сцены на части со сходными свойствами, например, на области с близкими значениями яркости. В ландшафтных сценах, характерной особенностью которых является сложный статистический характер яркости пикселей, сегментация проводится для разбиения сцены на статистически однородные части. Решение задачи выделения границы объекта состоит из последовательности операций (рис. 1), основными из которых являются: сканирование сцены, обнаружение контура изображения и прослеживание линии контура в условиях воздействия фоновых шумов, формирование кода контура и предварительная обработка контура. Контурное изображение может быть получено из исходного путем выделения областей, содержащих резкие переходы от темного к светлому, и подавления областей с примерно однородной интенсивностью. Рассмотрим некоторые варианты получения контурного изображения. Современная универсальная технология доступа к коллекциям изображений связана с сопоставлением изображению набора визуальных примитивов (характеристик цвета, формы, текстуры, а для видео еще и параметров движения сцены и объектов) и определением количественной оценки близости изображений по значениям примитивов. Рис. 1. Классическое решение задачи выделения границы объекта Визуальные примитивы – это характеристики изображения, которые автоматически вычисляются по оцифрованным визуальным данным, позволяют эффективно индексировать их и обрабатывать запросы с использованием визуальных свойств изображения. Поисковый образ изображения, сгенерированный из визуальных примитивов, невелик по размеру в сравнении с самим изображением и удобен для организации поиска. Вычисление подобия изображений заменяет операцию установления соответствия запросу. Хотя запросом в такой системе может быть описание набора примитивов, более удобен запросный механизм поиска по образцу, когда система отыскивает изображения, визуально похожие на предоставленный образец. Система анализирует образец аналогично тому, как это делается при составлении поисковых образов изображений базы. Вычисление подобия изображения-образца изображениям коллекции осуществляется на основании сравнения значений отдельных визуальных примитивов, при этом система определяет меру их отличия, а затем сортирует изображения базы в соответствии с близостью к образцу по всем параметрам, с учетом указываемой в запросе степени важности каждого параметра. Поиск на таком уровне абстракции не предполагает идентификацию объектов. Методы распознавания образов и понимания сцены в настоящее время из-за отсутствия эффективных универсальных алгоритмов применяются в узких предметных областях. Тем не менее, подобные методы могут быть применены к поиску определенного класса технических объектов с известными свойствами на сцене. Примером такого использования методов может быть идентификация колеса на реальном изображении (рис. 2). Рис. 2. Задача выделения колеса на изображении В частности мы предлагаем применить для реализации подобных методов технику преобразования Фурье. Алгоритм в данном случае представляет собой следующую последовательность операций (рис. 3). Рис. 3. Структурная схема выделения объекта на изображении посредством преобразования Фурье В качестве начальных данных выбирается объект, который необходимо детерминировать на визуальном изображении. Применительно к задаче нашей работы этим объектом является колесо. Для данного объекта проводится спектральный анализ, посредством применения дискретного преобразования Фурье к фрагменту данного изображения. Пусть полигональный контур (n) представляет собой периодическую 0,k 1 последовательность элементарных волн (n) n 0,1..., k 1. Его дискретное преобразование Фурье P p(m) определяется в виде 0,k 1 k 1 p(m) (n)e i 2 mn k n 0 k 1 ( n) e 2 i mn n k , (1) n 0 где m 0,1,..., k 1 . Элементарные волны (ЭВ) p(m) , m 0,1,..., k 1 , являются комплексными числами, и их упорядоченная последовательность p(0), p(1),..., p(k 1) также образует на плоскости некоторый контур Р. ЭВ p(m) получаются суммированием всех ЭВ контура Г, каждый из которых предварительно поворачивается на угол, равный 2 mn . k Обратное дискретное преобразование Фурье для контуров записывается в виде: 2 i 1 k 1 ( n ) p ( m) e k k m 0 mn , (2) где n 0,1..., k 1. Рассмотрим возможность применения преобразования Фурье для анализа и обработки изображений. Пусть мы имеем некоторое исходное изображение (рис. 4). Проведя дискретное преобразование Фурье согласно (1) получим спектр данного изображения в следующем виде (рис. 5). На приведенном выше спектральном анализе явно видны гармоники шума. Проведём фильтрацию данного спектра, путём отбрасывания всплесков шумового сигнала. Тогда получим скорректированный спектр, которому соответствует отфильтрованное изображение (рис. 6). Рис. 4. Исходное изображение и его трёхмерный образ Рис. 5. Исходный спектр изображения Перейдём теперь к изображению, на котором необходимо найти объект. Задачу поиска объекта будем решать по пути обратной фильтрации посредством преобразования Фурье. Для начала анализа осуществим разбивку данного изображения на фрагменты, равные по площади. При этом фрагменты должны быть близкими к размеру объекта, но не меньше его. Следующим шагом алгоритма является определение спектра для каждого фрагмента изображения. Фрагмент, спектр которого будет наиболее близок к спектру искомого образца и будет содержать значимую часть данного объекта. Для определения полных границ искомого объекта соседние, с уже найденным, фрагменты подвергаются более детальному анализу с разбиением на подсегменты и итеративным повторением алгоритма. Рис. 6. Отфильтрованный спектр и соответствующее ему изображение в двумерном и трёхмерном представлении Пример работы данного алгоритма для элементарных изображений представлен на рисунке ниже (рис. 7). Слева приведено исходное изображение, ниже слева образец, справа – найденный фрагмент. Уровень релевантности спектра образца и найденного фрагмента составляет 95%. Основным достоинством данного алгоритма является его высокое быстродействие. К недостаткам алгоритма можно отнести сложность его применения при значительном визуальном отклонении примитива и искомого объекта. В частности для колеса подобная ситуация может формироваться при различных углах поворота. При подобной ситуации спектр столбца изображения после Фурье преобразования сильно отличается от аналогичного спектра в примитиве, что приводит к неоднозначности получаемой детерминации. Однако некоторая доработка данного алгоритма, возможно, позволит решить проблему его применимости в условиях данной задачи. Рис. 7. Пример функционирования алгоритма поиска образца на изображении посредство преобразования Фурье для элементарных сцен В частности, разработанный алгоритм мы предлагаем использовать как первую стадию задачи выделения актуальной части визуального образа. На следующем шаге решения данной задачи мы предлагаем использовать механизм определения близости спектров выделенных сегментов на основе нейросетевого анализа. Структурная схема алгоритма выделения актуальной части образа в данном случае может быть представлена в виде (рис. 8). Рис.8. Структурная схема ДПФ сегментации с последующим нейросетевым анализом спектра В данном случае переход к спектральному анализу изображений сегментов позволяет существенно сократить инвариантность рассматриваемых в задаче образов по отношению к прямому нейросетевому анализу изображения.