Документ 605381
реклама

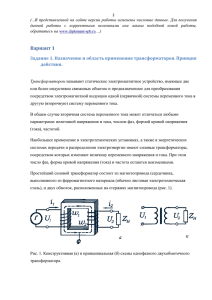
(...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) Контрольная работа по предмету Электрические машины и трансформаторы 0. Угловые характеристики синхронного генератора. Электромагнитная мощность явнополюсного синхронного генератора: 2 m U E m U 1 1 1 c 0 1 c P sin sin 2 э . м . , x 2 x x d q p Электромагнитный момент явнополюсного синхронного генератора: 2 P U E m U 1 1 э . м . m 1 c 0 1 c M sin sin 2 x 2 x x 1 1 d 1 q p Электромагнитный момент явполюсной синхронной машины имеет две составляющие: Основная составляющая электромагнитного момента m U E 1 c 0 M sin осн x 1 d Реактивная составляющая 2 m U 11 1 c M sin 2 р 2 x 1 q x p Основная составляющая электромагнитного момента зависит не только от напряжения сети, но и от ЭДС Е0, наведенной магнитным потоком вращающегося ротора Ф в обмотке статора: E 4 .44 f w k 0 1 1 об 1 . В машине с недовозбужденным ротором ( 0 ) Mосн 0. Реактивная составляющая электромагнитного момента не зависит от магнитного потока полюсов ротора. Для возникновения этой составляющей достаточно двух условий: (0) чтобы ротор машины имел явно выраженные полюса и (0) чтобы к обмотке статора было подведено напряжение сети. При увеличении нагрузки синхронного генератора происходит увеличение угла , что ведет к изменению электромагнитной мощности генератора и его электромагнитного момента. Зависимость этих двух величин от угла выражается угловыми характеристиками синхронной машины. Основная составляющая электромагнитного момента M осн и соответствующая ей составляющая электромагнитной мощности изменяются пропорционально синусу угла 2 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) Mp (график 0), а реактивная составляющая момента и соответствующая ей составляющая электромагнитной мощности изменяются пропорционально синусу угла 0 (график 0). Зависимость результирующего момента и электромагнитной мощности от угла определяются графиком 0. Максимальное значение электромагнитного момента соответствует критическому значению угла кр . При увеличении нагрузки синхронной машины до значений соответствующих углу кр , синхронная машина работает устойчиво (рост нагрузки генератора сопровождается увеличением электромагнитного момента). В этом случае любой установившейся нагрузке соответствует равенство вращающего момента первичного двигателя сумме противодействующих моментов. При нагрузке, соответствующей углу кр , электромагнитный момент уменьшается, что ведет к нарушению равенства вращающего и противодействующих моментов. Неуравновешенная часть вращающего момента вызывает увеличение частоты ращения ротора, что ведет к нарушению условий синхронизации. 80 Для явнополюсных синхронных машин кр60 . У неявнополюсных синхронных машин M p 0 , поэтому угловая характеристика представляет собой синусоиду и угол кр 90 . 3 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) Отношение максимального электромагнитного момента к номинальному называется перегрузочной способностью синхронной машины или коэффициентом статической перегружаемости 0. Синхронный компенсатор. Синхронный компенсатор представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей реактивной мощности, в первую очередь относятся асинхронные двигатели. Благодаря этому реактивная мощность в генераторе и ЛЭП доведена до некоторого минимального значения. Это способствует повышению технико-экономических показателей всей электрической системы. Синхронный компенсатор представляет собой синхронный двигатель, работающий в режиме холостого хода, обычно с перевозбуждением. При подключении потребителя Z к сети с напряжением U c в сети возникает ток IZ , отстающий по фазе от напряжения на угол Z , обусловленный значительной индуктивной составляющей тока IZ . При подключении синхронного компенсатора параллельно потребителю Z и создании в компенсаторе режима перевозбуждения в сети появляется ток IСК , опережающий по фазе напряжение U c на угол 90. Результирующий ток в сети Ic IZIСК. 0. Электромагнитный момент и механические характеристики асинхронного двигателя. Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности: M Pэм 1 , n/60– угловая частота вращения магнитного поля. 1 2 где 4 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) 2 m U r 1 1 2 M 2 2 s [( r c r / s ) ( x c x ) ] 1 1 1 2 1 1 2 Параметры схемы замещения r1, c1r2, x1 и c1 x2 являются постоянными, т.к. их значения при изменении нагрузки машины остаются практически постоянными. Также постоянными можно считать синхронную скорость 1 и напряжение питания U1 . Единственная переменная величина – скольжение s, которая для различных режимов работы может принимать различные значения в диапазоне от + до –. Зависимость момента от скольжения называют механической характеристикой асинхронной машины. При значениях скольжения s 0 и s электромагнитный момент M 0 . Из этого следует, что механическая характеристика M f (s) имеет максимум. Величина критического скольжения sкр , соответствующая максимальному моменту c r 1 s кр 2 2 ) r ( x c x 1 1 1 2 Максимальный момент 2 m U 1 1 M max 2 2 2 c [ r r ( x c x ) ] 1 1 1 1 1 1 2 Знак плюс соответствует двигательному, а знак минус – генераторному режиму работы. 5 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) Электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети. Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента. Подставив в выражение М скольжение s 1 получаем пусковой момент асинхронного двигателя 2 m U r 1 1 2 M . п 2 2 [( r c r ) ( x c x ) ] 1 1 1 2 1 1 2 Под действием этого момента ротор двигателя начинает вращение, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой M f (s) . При критическом скольжении sкр момент достигает максимального значения. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя. Устойчивая работа асинхронного двигателя возможна при скольжении меньше критического ( s sкр ). При достижении электромагнитным моментом максимального значения наступает предел устойчивой работы двигателя. Работа асинхронного двигателя становится неустойчивой при s sкр . Чтобы работа асинхронного двигателя была надежной и чтобы случайные перегрузки не вызывали остановок способностью. двигателя, Перегрузочная необходимо, способность чтобы двигателя он обладал определяется перегрузочной отношением максимального момента M max к номинальному M н . Для асинхронных двигателей /M 1 . 7 2 . 5 max н общего применения перегрузочная способность составляет M . 0. Пуск асинхронных двигателей с короткозамкнутым ротором. Формирование пусковых характеристик двигателей производится путем введения в цепь ротора активного сопротивления и уменьшения этого сопротивления по мере разгона двигателя. В короткозамкнутых асинхронных двигателях введение дополнительного сопротивления в цепь ротора невозможно. Однако тот же результат может быть получен, если 6 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) воспользоваться эффектом вытеснения тока на поверхность проводника. Сущность этого явления состоит в следующем. При протекании по проводнику переменного тока в нем индуцируется э.д.с. самоиндукции, направленная против тока. Если проводник находится в воздухе, то влияние э.д.с. самоиндукции незначительно. Если же проводник помещен в тело магнитопровода, то индуктивность многократно увеличивается и э.д.с. самоиндукции, направленная против тока, играет роль индуктивного сопротивления, препятствующего протеканию тока. Если ротор имеет глубокие пазы с высокими узкими стержнями (проводниками), то при пуске двигателя, когда частота тока ротора близка к 00 Гц, э.д.с. самоиндукции неравномерно распределена по высоте стержня (максимальна в глубине стержня, минимальна на поверхности). Вследствие этого ток в основном пойдет по верхней части стержня. Это явление называют вытеснением тока на поверхность паза. При этом эффективное сечение стержня, по которому идет ток, будет в несколько раз меньше, чем общее сечение стержня обмотки ротора. Таким образом, увеличивается активное сопротивление ротора. Поскольку э.д.с. самоиндукции зависит от частоты тока (т.е. скольжения), то и сопротивление является функцией скольжения. При пуске, когда скольжение велико, сопротивление увеличивается (в цепь ротора как бы вводится добавочное сопротивление). По мере разгона двигателя скольжение двигателя уменьшается, эффект вытеснения тока ослабевает, ток начинает распространяться вниз по сечению проводника. При достижении рабочей скорости частота тока ротора настолько мала, что явление вытеснения тока уже не сказывается, ток протекает по всему сечению проводника, сопротивление которого минимально. Благодаря такому автоматическому изменению сопротивления пуск короткозамкнутых асинхронных двигателей протекает благоприятно: пусковой ток составляет 0.0-6.0 номинального, а пусковой момент 0.0-0.0 номинального. Варьировать параметры 7 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) Задача № 0 Для 0-х неявнополюсного синхронного генератора построить упрощенную векторную диаграмму. Падением напряжения в активном сопротивлении обмотки якоря пренебречь. Обмотка статора генератора соединена в звезду. При построении необходимо задаться 2000 B /c м 1000 A /c м U I масштабами по току и напряжению: m , m . Синхронное индуктивное сопротивление пересчитать в именованные единицы по формуле: * X X U /Iн. c сн ф Из построения определить: Величину ЭДС синхронного генератора в режиме холостого хода E0 . Величину угла . Данные синхронного генератора: P МВт н 32 Uн 6.3кВ cos н 0.8 * Xсн 2.52 Решение 38.7 8 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) Задача № 0 Для 0-х фазного асинхронного двигателя с короткозамкнутым ротором определить: 1. Число полюсов. 2. Номинальное скольжение. 3. Частоту тока ротора. 4. Суммарные потери в двигателе. 5. Номинальный ток. 6. Пусковой ток. 7. Полезный момент двигателя на валу. 8. Момент холостого хода. 9. Электромагнитный номинальный момент. 10. Пусковой момент 11. Максимальный момент. 12. Построить механическую характеристику. 9 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) 13. Определить возможность запуска электродвигателя при снижении напряжения на 00%. Данные для расчета: P 160 кВт н Uн 380 В n 1000 об /мин 1 n 985 об /мин 2 93.4% cos н 0.9 Iп/Iн 5.55 M 1 .45 п/M н M /M 2 .05 max н Решение 60f 0. При частоте сети f 50Гц частота вращения магнитного поля равна n1 p . 60 f 60 50 3 Отсюда p – три пары полюсов. n 1000 1 n n 985 1 21000 0 . 015 1 . 5 % н 0. Скольжение в номинальном режиме s . n 1000 1 s f 0 . 015 50 0 . 75 Гц 2 н 0. Частота тока ротора: f P 160 н P P 160 11 . 3 кВт н 0. Суммарные потери в двигателе: 0 . 934 2 /M s ( 1 ), M max н где s к н 10 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) 00. Возможность запуска электродвигателя при снижении напряжения на 00%: Пусковой ток, пусковой и максимальный моменты при напряжении U 0.9Uн . 11 (...В представленной на сайте версии работы изменены числовые данные. Для получения данной работы с корректными величинами или заказа подобной новой работы, обратитесь на www.diplomant-spb.ru ...) U I I 1756 0 . 9 1580 A п п U н 2 U 2 M M 2 . 25 0 . 9 1 . 82 кН м п п U н Так как пусковой момент, то пуск двигателя возможен. 12