по предмету «Системы автоматического управления» Подготовил
реклама

Практикум
по предмету
«Системы автоматического управления»
Подготовил
Сергей Чекрыжов
Кохтла-Ярве
2006
Методическое пособие содержит варианты практических заданий по предмету «Системы
автоматического управления».
В пособии приведены также примеры решения задач.
Составитель Чекрыжов С., доц., канд. техн. наук
Практическая работа № 1
1. По заданным дифференциальным уравнениям определить операторные уравнения
при нулевых начальных условиях, передаточные функции, структурные схемы
звеньев.
Пример решения задания 1
Дано дифференциальное уравнение, характеризующее динамику технологического
объекта,
6,25
d2y
d t
2
4
dy
dx
du
y 9x 1,2
5
dt
dt
dt .
Если обозначить Y(s), X(s) и U(s) как изображения сигналов y, x и u
соответственно, то операторное уравнение (при нулевых начальных условиях) в данном
случае примет вид:
6,25s2Y(s) + 4sY(s) + Y(s) = 9X(s) – 1,2sX(s) - 5sU(s).
Данное уравнение можно преобразовать, вынеся Y(s) и X(s) за скобки:
Y(s). (6,25s2 + 4s + 1) = X(s). (9 – 1,2s) - 5sU(s).
Отсюда получено:
Y(s)
9 1,2s
6,25s 2 4s 1
X(s)
5s
6,25s 2 4s 1
U(s) .
Если обозначить передаточные функции объекта как
9 1,2s
5s
Wx (s)
è
W
(
s
)
u
,
6,25s 2 4s 1
6,25s 2 4s 1
то получается уравнение
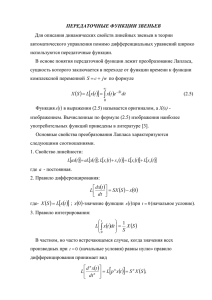
приведена на рис. 1.
Y(s) = Wx(s).X(s) + Wu(s).U(s). Структурная схема объекта
2. По заданной передаточной функции записать дифференциальное уравнение.
Пример решения задания 2
Дана передаточная функция вида
W (s)
7s 3 5,5
(s 0,5)(3s 2 2)
.
Для записи дифференциального уравнения необходимо учесть, что по определению
Y(s)
W(s)
, откуда получено:
X(s)
7s 3 5,5
Y(s)
,
(s 0,5)(3s 2) X(s)
Y(s) (s – 0,5)(3s2 + 2) = X(s) (7s3 + 5,5),
Y(s) (3s3 + 2s – 1,5s2 – 1) = X(s) (7s + 5,5),
3s3 Y(s) + 2s Y(s) – 1,5s2 Y(s) – Y(s) = 7s X(s) + 5,5 X(s).
Теперь, если применить обратное преобразование Лапласа, получается:
d3y
dy
d2y
d3x
3 3 2
1,5 2 y 7 3 5,5x . ♦
dt
dt
dt
dt
W(s)
2
Практическое занятие 2
Решение дифференциальных уравнений с использованием преобразований Лапласа.
Пример 2.1 Динамика технологического процесса описывается дифференциальным
уравнением
d2y
dy
dx
5 6 y 2 12 x
2
dt
dt
dt
Допустим, входной сигнал имеет форму единичного ступенчатого воздействия, т.е.
1
x(t) = 1. Тогда изображение входного сигнала имеет вид X(s) = .
s
Производим преобразование исходного дифференциального уравнение по Лапласу
и подставляем X(s):
s2Y(s) + 5sY(s) + 6Y(s) = 2sX(s) + 12X(s),
s2Y(s) + 5sY(s) + 6Y(s) = 2s
1
1
+ 12 ,
s
s
Y(s)(s3 + 5s2 + 6s) = 2s + 12.
Определяется выражение для Y:
Y(s)
2s 12
s 3 5s 2 6s
.
Оригинал полученной функции отсутствует в таблице оригиналов и изображений.
Для решения задачи его поиска дробь разбивается на сумму простых дробей с учетом
того, что знаменатель может быть представлен в виде s(s + 2)(s + 3):
2 4
2
2 s 12
2 s 12
=
= +
.
2
s 5s 6s s( s 2)( s 3) s s 2 s 3
Теперь, используя табличные функции , определяется оригинал выходной
функции:
y(t) = 2 - 4.e-2 t + 2.e-3t.
Y
3
Теперь можно построить график полученной функции.
При решении дифференциальных уравнений с использованием преобразований Лапласа
часто встает промежуточная задача разбиения дроби на сумму простых дробей.
Существуют два пути решения этой задачи:
- путем решения системы уравнений относительно коэффициентов числителей,
- путем расчета коэффициентов числителей по известным формулам.
Общий алгоритм разбиения дроби на сумму простых дробей:
шаг 1 – определяются корни знаменателя si для этого знаменатель дроби приравнивают к
нулю и решают полученное уравнение относительно s;
шаг 2 – каждому корню ставится в соответствие простая дробь вида
Mi
, где Мi –
s si
неизвестный коэффициент; если имеет место кратный корень с кратностью k, то
ему ставится в соответствие k дробей вида M ij , j 1, k ;
(s s i ) j
шаг 3 – определяются коэффициенты Mi по одному из вариантов расчета.
Первый вариант. Определение Mi с помощью системы уравнений.
Все дроби приводятся к одному знаменателю, затем путем сравнения
коэффициентов при равных степенях s числителя полученной дроби и числителя
исходной определяется система из n уравнений, где n – степень знаменателя (количество
корней si и коэффициентов Mi). Решение системы относительно Mi дает искомые
коэффициенты
Пример.2.1. Провести декомпозицию дроби
Y
2 s 12
s 5s 2 6 s
3
. В исходной дроби n = 3, поэтому решение уравнения s3 + 5s2 + 6s = 0 дает 3 корня:
s0 = 0, s1 = -2 и s2 = -3, которым соответствуют знаменатели простых дробей вида
s, (s – s1) = (s + 2) и (s – s2) = (s + 3).
Исходная дробь декомпозируется на три дроби:
2s 12
M0 M
2 s 12
Y 3
=
=
+ 1 + M2 .
s
s 5s 2 6s s(s 2)(s 3)
s2 s3
Далее дроби приводятся к общему знаменателю:
( M 0 M 1 M 2 ) s 2 (5M 0 3M 1 2 M 2 ) s 6M 0
=
.
s( s 2)( s 3)
Сравнивая получившуюся дробь с исходной, можно составить систему из трех
уравнений с тремя неизвестными (при 2-й степени s в исходной дроби стоит 0, при 1-й
стоит 2, свободный член равен 12):
М0 + М1 + М2 = 0
5.М0 + 3.М1 + 2.М2 = 2
6.М0 = 12
M0 = 2
M1 = -4
M2 = 2
Следовательно, дробь можно представить как сумму трех дробей:
2s 12 = 2 - 4 + 2 .
Y 3
s 5s 2 6s s s 2 s 3
Пример 2.2 Случай обратного преобразования Лапласа при наличии комплексных
корней.
Изображение выходного сигнала имеет вид
5,75
Y ( s)
.
3
s(1,8s 5,22 s 2 4,3s 6,75)
Корни знаменателя включают нулевой корень, действительный и
комплексных корней:
s0 = 0;
s1 = - 2,54;
s2,3 = - 0,18 j*1,20.
Изображение Y(s) разбивается на сумму четырех дробей:
Y(s) Y0 (s) Y1 (s) Y2,3 (s)
пару
M2
M0
M3
M1
.
s
s s1 s s 2 s s 3
Тогда оригинал y(t ), имеет вид
y(t) = y0(t) + y1(t) + y2,3(t) = M0 + M 1 * e S1t + 2 еt [C . cos(.t) - D . sin(.t)],
где и - действительная и мнимая части пары комплексных корней s2,3, C и D –
действительная и мнимая части пары коэффициентов М2 и М3.
Для корня s0 = 0:
M0
B(0)
5,75
5,75
0,85 ,
3
2
A1 (0) 1,8s 5,22s 4,3s 6,75 S0 6,75
M 0 0,85
,
s
s
y0(t) = M0 = 0,85.
Для корня s1 = -2,54:
B( s )
5,75
M1 '
4
A ( s) S S1 (1,8s 5,22s 3 4,3s 2 6,75s)'
Y0 ( s )
S S1
5,75
0,18 ,
7,2s 15,66s 2 8,6s 6,75 SS1
3
Y1 ( s )
M1
0,18
,
s s1 s 2,54
y1(t) = M1 * e 1 0,18 * e
.
Для корней s2,3 = -0,18 j*1,20:
B( s )
5,75
M2 '
4
A ( s) S S 2 (1,8s 5,22s 3 4,3s 2 6,75s)'
St
,
2 , 54 t
,
S S 2
5,75
0,34 j * 0,24 ,
7,2s 3 15,66s 2 8,6s 6,75 SS2
M3
M2
0,34 j 0,24 0,34 j 0,24
,
s s 2 s s3 s 0,18 j 1,20 s 0,18 j 1,20
y2,3(t) =2 е-0,18t [-0,34 cos(1,20 t) - 0,24 sin(1,20 t)].
В итоге получаем оригинал:
y(t) = 0,85 – 0,18 е-2,54 t – 2 е-0,18 t [0,34 cos(1,20 t) + 0,24 sin(1,20 t)].
Y2 , 3 ( s )
Можно построить график переходного процесса.
6
Практическая работа № 3
x
e
u
P
y
ОУ
Дана одноконтурная АСР, для которой определена передаточная функция
регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ).
Требуется определить:
- передаточную функцию разомкнутой системы W∞(s),
- характеристическое выражение замкнутой системы (ХВЗС),
- передаточные функции замкнутой системы Фз(s) – по заданию,
Фв(s) – по возмущению, ФЕ(s) – по ошибке,
Пример решения задания
Дан ПИ-регулятор с ПФ вида Wp = 2 +
1
и объект управления, описываемый
s
дифференциальным уравнением
2
d3y
dt 3
3
d2y
dt 2
dy d 2 u
du
2 4
u .
dt dt
dt
Определяется передаточная функция объекта:
Wоб (s)
s 2 4s 1
2s 3 3s 2 s
.
Тогда передаточная функция разомкнутой системы имеет вид:
1 s 2 4s 1
2s 3 9s 2 6s 1 B(s)
.
W (s) Wp (s) Wоб (s) 2 3
s 2s 3s 2 s
A(s)
2s 4 3s 3 s 2
ХВЗС:
D(s) = A(s) + B(s) = 2s4 + 3s3 + s2 + 2s3 + 9s2 + 6s + 1 = 2s4 + 5s3 + 10s2 + 6s + 1.
Передаточные функции замкнутой системы:
Ф з (s)
W (s)
B(s)
2s 3 9s 2 6s 1
4
- по заданию,
1 W (s) D(s) 2s 5s 3 10s 2 6s 1
Ф E (s)
A(s)
1
2s 4 3s 3 s 2
4
- по ошибке,
1 W (s) D(s) 2s 5s 3 10s 2 6s 1
s 2 4s 1
Ф в (s)
Wоб (s)
1 W (s)
s 3 4s 2 s
2s 3 3s 2 s
- по возмущению.
2s 3 9s 2 6s 1 2s 4 5s 3 10s 2 6s 1
1
2s 4 3s 3 s 2 7
По передаточным функциям определяются коэффициенты усиления путем
подстановки в них s = 0:
Кз = Фз(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Практическая работа 4
4.1 Виды соединений динамических звеньев
Для анализа объект управления разбивают на типовые звенья и после определения
передаточных функций для каждого звена объединяют их в одну передаточную функцию
объекта. Вид передаточной функции объекта зависит от вида соединения звеньев:
1) Последовательное соединение.
Wоб = W1.W2.W3…
х
W1
W2
у
W3
При последовательном соединении звеньев
их
передаточные
функции
перемножаются.
Рисунок 1.
2) Параллельное соединение.
Wоб = W1 + W2 + W3 + …
W1
х
При параллельном соединении звеньев их
передаточные функции складываются.
у
W2
W3
Рисунок 2
3) Обратная связь
х
Передаточная функция по заданию (х):
у
W1
Wç (s)
W2
W1
1 W1 W2
«+» соответствует отрицательной ОС,
«-» - положительной.
Рисунок 3
Для определения передаточных функций объектов, имеющих более сложные соединения
звеньев, используют последовательное укрупнение схемы
4.2 Передаточные функции АСР
Для исследования и расчета структурную схему АСР путем эквивалентных
преобразований приводят к простейшему стандартному виду «объект - регулятор» (см.
рисунок 4).
f
x
e
Wp
u
Рисунок 4
Wy
y
Если выход системы у не подавать на ее вход, то получается разомкнутая система
регулирования, передаточная функция которой определяется как произведение:
W = Wp.Wy
(Wp - ПФ регулятора, Wy - ПФ объекта управления).
То есть последовательность звеньев Wp и Wy может
быть заменена одним звеном с W. Передаточную
функцию замкнутой системы принято обозначать как
х
у
W
Ф(s). Она может быть выражена через W:
Фз(s) = Y(s) = W (s) .
Рисунок 5
X(s)
1 W (s)
В подавляющем большинстве АСР являются системами с обратной отрицательной связью
Передаточная функция Фз(s) определяет зависимость у от х и называется
передаточной функцией замкнутой системы по каналу задающего воздействия (по
заданию).
Для АСР существуют также передаточные функции по другим каналам:
1
Фe(s) = E(s) =
- по ошибке,
X(s) 1 W (s)
Wу.в. (s)
Фв(s) = Y(s) =
- по возмущению,
F(s) 1 W (s)
где Wу.в.(s) – передаточная функция объекта управления по каналу передачи
возмущающего воздействия.
В отношении учета возмущения возможны два варианта:
- возмущение оказывает аддитивное влияние на управляющее воздействие (см. рисунок
6,а);
- возмущение влияет на измерения регулируемого параметра (см. рисунок 6,б).
Примером первого варианта может быть влияние изменения характеристик теплоносителя
на температуру в реакторе . Пример второго варианта: погрешности при измерениях
регулируемого параметра –температуры в реакторе вследствие изменения температуры
окружающей среды. Wу.в. – модель влияния окружающей среды на измерения.
f
e
x
u
Wp
Wy
y
а)
f
x
e
Wp
u
Wy.в.
Wy
y
б)
Рисунок 6
Для первого варианта передаточная функция Wу.в. принимается равной Wу, для второго –
как правило, на схеме она выделена в отдельное звено.
Поскольку передаточная функция разомкнутой системы является в общем случае дробнорациональной функцией вида W = B(s) , то передаточные функции замкнутой системы
A(s)
могут быть преобразованы:
Фз(s) =
B
B =B,
A =
AB D
B
1
A
Фe(s) = 1
1
=
B
A
A =A,
AB D
где D = A + B.
Как видно, эти передаточные функции отличаются только выражениями числителей.
Выражение знаменателя называется характеристическим выражением замкнутой
системы и обозначается как Dз(s) = A(s) + B(s), в то время как выражение, находящееся в
знаменателе передаточной функции разомкнутой системы W, называется
характеристическим выражением разомкнутой системы А(s).
Пример 4.3 Определение передаточных функций АСР.
Структура АСР представлена на рисунке 7. Требуется определить передаточные функции
регулятора, объекта, разомкнутой системы, замкнутой системы и характеристические
выражения.
1K
0
Регулятор
Объект управления
s
x
e
2
3
K1
4
u
K4
2 s 1
5
y
e-τ·S
K2s
Рисунок 7 Структурная схема замкнутор системы автоматического регулирования с PIDрегулятором
Параметры K0 = 1, K1 = 3, K2 = 1,5, K4 = 2 .
В структурной схеме АСР звенья, соответствующие регулирующему устройству, стоят
перед звеньями объекта управления и генерируют управляющее воздействие на объект u.
По схеме видно, что к схеме регулятора относятся звенья 1, 2 и 3, а к схеме объекта –
звенья 4 и 5.
Учитывая, что звенья 1, 2 и 3 соединены параллельно, получаем передаточную функцию
регулятора как сумму передаточных функций звеньев:
W p( s )
K0
1
1,5 s 2 3 s 1 .
K1 K 2 s 3 1,5 s
s
s
s
Звенья 4 и 5 соединены последовательно, поэтому передаточная функция объекта
управления определяется как произведение передаточных функций звеньев:
Woy ( s )
K4
e s .
2 s 1
Передаточная функция разомкнутой системы:
W ( s) W p ( s) Woy ( s)
1,5 s 2 3 s 1 2 e s ,
s
2 s 1
откуда видно, что числитель В(s), знаменатель (он же характеристический полином
разомкнутой системы) А(s). Тогда характеристический полином замкнутой системы
равен:
D(s) = A(s) + B(s) Передаточные функции замкнутой системы:
по заданию Фз ( s) B( s) ,
D( s )
по ошибке Фe ( s) A( s) .
D( s )
При определении передаточной функции по возмущению принимается Wу.в. = Wоу.
Тогда
Фв ( s)
W у .в . ( s )
1 W ( s)
Практическая работа 5
Определение параметров передаточной функции объекта по переходной кривой
Процесс получения передаточной функции объекта, исходя из данных о
переходном процессе, называется идентификацией объекта.
Предположим, что при подаче на вход
у
некоторого объекта ступенчатого воздействия была
ууст
получена переходная характеристика (см. рисунок
8). Требуется определить вид и параметры
передаточной функции.
Предположим, что передаточная функция имеет
вид
t
д
T
K s
W(s)
e
Рисунок 8
Ts 1
(инерционное звено с запаздыванием).
Параметры передаточной функции: К - коэффициент усиления, Т - постоянная
времени, - запаздывание.
Коэффициентом усиления называется величина, показывающая, во сколько раз данное
звено усиливает входной сигнал (в установившемся режиме), и равная отношению
выходной величины у в установившемся режиме ко входной величине х:
K
у уст
х
,
Установившееся значение выходной величины ууст - это значение у при t .
Запаздыванием называется промежуток времени от момента изменения входной
величины х до начала изменения выходной величины у.
Постоянная времени Т может быть определена несколькими методами в зависимости от
вида передаточной функции. Для рассматриваемой передаточной функции 1-го
порядка Т определяется наиболее просто: сначала проводится касательная к точке
перегиба, затем находятся точки пересечения с осью времени и асимптотой yуст;
время Т определяется как интервал времени между этими точками.
В случае, если на графике между точкой перегиба имеется вогнутость,
определяется дополнительное запаздывание доп, которое прибавляется к основному: =
+ доп.
Практическое занятие 6
Качество процессов управления
Показатели качества
Если исследуемая АСР устойчива, то может возникнуть вопрос о том, насколько
качественно происходит регулирование в этой системе и удовлетворяет ли оно
технологическим требованиям. На практике качество регулирования может быть
определено визуально по графику переходной кривой, однако имеются точные методы,
дающие конкретные числовые значения.
Показатели качества разбиты на 4 группы:
1) прямые - определяемые непосредственно по кривой переходного процесса;
2) корневые - определяемые по корням характеристического полинома;
3) частотные - по частотным характеристикам;
4) интегральные - получаемые путем интегрирования функций.
Корневые, частотные и интегральные критерии качества называют также
косвенными, поскольку они в отличие от прямых определяют качество системы не
непосредственно по переходной кривой, а по косвенным характеристикам (передаточным
функциям, ЧХ и т.д.). В этом заключается достоинство данных критериев: они не требуют
построения переходной кривой. Однако информация для косвенных критериев на
практике не всегда доступна (не всегда известна, например, передаточная функция
рассматриваемого объекта).
6.1 Прямые показатели качества
К ним относятся: степень затухания , перерегулирование , статическая ошибка
ест, время регулирования tp и др.
Предположим, переходная кривая, снятая на объекте, имеет колебательный вид
(см. рисунок 1.47).
Рисунок 7.1
По ней определяется установившееся значение выходной величины
y уст lim y (t ) .
t
Степень затухания определяется по формуле
1
A3 ,
A1
где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
Перерегулирование =
y max y уст
A1
, где ymax - максимум переходной кривой.
y уст
y уст
Статическая ошибка ест = х - ууст, где х - входная величина.
Время достижения первого максимума tм определяется по графику.
Время регулирования tp определяется следующим образом: определяется допустимое
отклонение и строится «коридор» шириной 2. Время tp соответствует последней
точке пересечения y(t) с данной границей. То есть время, когда колебания
регулируемой величины перестают превышать допустимого отклонения от
установившегося значения.
Обычно допустимое отклонение принимается равным 5 % от установившегося
значения: = 5% ууст. Однако оно может быть и другим. Например, если ууст = 0, то
допустимое отклонение принимается равным 5 % от амплитуды А1.
Оптимальные значения времени регулирования, времени достижения первого
максимума, перерегулирования и статической ошибки соответствуют минимальным
значениям (чем меньше, тем лучше). Степень затухания, наоборот, должна быть
максимально большой (максимум равен 1).
6.2. Интегральные показатели качества
Интегральные показатели качества определяются путем интегрирования
(суммирования) некоторых функций (переходных процессов или других показателей
качества). Разновидностью интегральных показателей качества является интегральный
квадратичный критерий I0.
Если рассмотреть два переходных процесса в некоторой АСР (см. рисунок 1.51), то
визуально можно определить, что первый процесс обладает более высоким качеством.
Численно
это
можно
охарактеризовать
площадью между соответствующей кривой и
прямой y = yуст. Для первой кривой эта площадь
(площадь S1) меньше, чем для второй (площадь
S2), поэтому первый процесс лучше.
Данная площадь определяется как интеграл
1
y(t)
yуст
S1
S2
2
t
Рисунок 7.4
S ( y уст y( t ))dt
0
и может быть использована как интегральный показатель качества.
Если учесть, что для АСР установившееся значение ууст должно в идеале совпадать
с заданным х, а выражение х – у(t) есть выражение ошибки регулирования e(t), то поиск S
сводится к интегралу ошибки. Если в системе имеется статическая ошибка ест = х – ууст
0, то площадь S получается бесконечной. Для учета этого фактора интегрируется не сама
ошибка, а ее переходная составляющая
I eп (t )dt ,
0
где еп(t) = e(t) – eуст – переходная составляющая ошибки.
Чаще используется интегральный квадратичный критерий
I 0 eп2 (t )dt ,
0
поскольку переходная составляющая на определенных интервалах времени может
принимать отрицательные значения, а следовательно, вычитаться из интегральной
величины, что приводит к неверному значению площади.
6.3 Связи между показателями качества
Описанные выше показатели качества связаны между собой примерными
соотношениями, справедливыми только для систем не выше второго порядка:
1 e
2 m
;
3
tp = ;
1 M
m
;
m2 1
M=
.
2m
Практическое занятие 7
Определение оптимальных настроек регуляторов
Формульный метод определения настроек регуляторов используется для быстрой и
приближенной оценки значений настроек регуляторов.
Если объект управления представляет собой инерционное звено с запаздыванием,
т.е. описывается передаточной функцией
W(s)
K s
e ,
Ts 1
где K – коэффициент усиления, Т - постоянная времени, - запаздывание , то настройки
П-, И-, ПИ- и ПИД-регуляторов могут быть определены по приведенным в таблице 1.5
формулам в зависимости от того, какой вид переходного процесса требуется получить. Во
второй колонке таблицы приведены формулы для апериодического процесса без
перерегулирования, в третьей – с перерегулированием 20 %, в четвертой – для процесса с
максимальным быстродействием (процесс может быть сильно колебательным).
Таблица 7.1
Регулятор
Апериодический
процесс
Процесс с
перерегулированием
20 %
П
0,3 T
K
1
K0
4,5 K
0,7 T
K
1
K0
1,7 K
И
K1
K1
Процесс с
минимальным
временем
регулирования
0,9 T
K1
K
1
K0
1,7 K
0,6 T
,
K
1
K0
K
0,95 T
K1
,
K
0,4 T
K0
,
K 2
0,38 T
K2
K
ПИ
0,7 T
,
K
1
K0
K
1,2 T
K1
,
K
0,6 T
K0
,
K 2
0,48 T
K2
K
K1
ПИД
K1
T
,
K
1
K0
K
1,4 T
K1
,
K
1,08 T
K0
,
K 2
0,7 T
K2
K
K1
Часто ставится задача поиска настроек, соответствующих
(максимальным или минимальным) значениям показателей качества Ci:
оптимальным
C i opt ,
которые могут образовывать векторный критерий С = {Ci}.
Поиск оптимальных параметров в смысле векторного критерия достаточно сложен.
Для упрощения он может быть сведен к достаточно хорошо изученной задаче
минимизации некоторой скалярной функции, которая является интегральным критерием I.
Функция I определяется путем сворачивания векторного критерия в скалярный одним из
методов:
1) аддитивный критерий
n
I i Ci ,
i 1
где αi – веса (весовые коэффициенты) показателей.
Если показатели имеют разные шкалы или размерности, то для облегчения
выбора весов иногда эти показатели нормируют:
Ĉ i
C1
C1o
,
o
где C1 - минимально (максимально) возможное значение показателя или диапазон
n
его шкалы. Веса также нормированы, т.е. i 1 .
i 1
2) линейно-квадратичный критерий
n
I ( i C i ) 2 .
i 1
Минимизация по такому критерию эквивалентна нахождению точки,
ближайшей к началу координат (с учетом весов).
3) Минимаксный (Чебышёвский) критерий
I max ( i Ci ) .
1i n
Смысл – минимизация самой большой потери.
4) Модель справедливого компромисса.
n
i
I Ci
i1
n
I i ln Ci .
i1
Для случая n = 2 имеем α = α1 = α2 = 0,5 и решение
I 1 I 2
.
I1
I2
То есть относительные потери по одному критерию приводят к
относительному преобразованию другого.
К критериям Ci предъявляются требования:
1) Ci > 0,
2) для оптимальных настроек Ci min (если изначально Ci max, то вместо него
вводится в рассмотрение критерий Ĉi
1
, который стремится к минимуму при Ci
Ci
max).
После определения интегрального критерия производится его минимизация в области
устойчивости (методом сканирования, градиентным методом и т.д.).
Поиск оптимальных настроек может вестись при заранее введенных ограничениях на
какие-либо показатели качества:
Ci Ci.зад. или
Ci Ci.зад. ,
где Ci.зад. – заданное значение показателя. Достигнутое при поиске значение должно быть
не хуже заданного. Для решения такой задачи поиска строятся т.н. кривые D-разбиения
равного значения показателя качества одним из перечисленных ниже методов в
зависимости от вида показателя.
минимума интегрального квадратичного критерия
I eп2 ( t )dt ,
0
где eп(t) = e(t) – eуст – переходная составляющая ошибки, соответствуют максимуму K0 на
кривой равного значения.
Задача поиска оптимальных настроек регуляторов относится к задачам параметрической
оптимизации. В целом при синтезе АСР различают три уровня оптимизации (начиная с
нижнего):
1) параметрический – заключается в настройке параметров – для данного уровня
существуют наиболее разработанные и формализованные методики;
2) структурный – подбираются оптимальные структуры регуляторов, различных
корректирующих звеньев – достаточно хорошо разработаны методики для
одноконтурных систем;
3) топологический – оптимизация некоторого критерия путем подбора структуры всей
АСР (выбор количества и мест включения обратных связей, регуляторов,
дополнительных звеньев) – существуют лишь частные методики, которые могут
давать физически нереализуемые решения.
СПИСОК ЛИТЕРАТУРЫ
1. Кулаков М.В. Технические измерения и приборы для химических производств. - М.:
Машиностроение, 1983. - 424 с.
2. Никитенко Е.А. Автоматизация и телеконтроль электрохимической защитой
магистральных газопроводов. - М.: Недра, 1976.
3. Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств. Учеб.
пособие -М.: Химия, 1982. - 296 с.
4. Теория автоматического управления / Под ред. Нетушила А.В. Ч.1. -М.: Высш. шк.,
1968.
5. Бесекерский В.А., Попов Е.П. Теория автоматического регулирования. -М.: Наука, 1966.
6. Автоматизация технологических процессов: Методические указания к курсовому и
дипломному проектированию./ Сост. Дадаян Л.Г. -Уфа: Изд-во УНИ, 1985. - 225 с.
7. Камразе А.Н., Фитерман М.Я. Контрольно-измерительные приборы и автоматика. Л.:
Химия, 1988. - 225 с.
8. Стефани Е.П. Основы построения АСУТП: Учеб. пособие -М.: Энергоиздат, 1982. -352
с.
9. Автоматические приборы, регуляторы и управляющие машины: Справочник/ Под ред.
Кошарского Б.Д. -Изд. 3-е. -Л.: Машиностроение, 1976. -486 с.
10. Голубятников В.А., Шувалов В.В. Автоматизация производственных процессов в
химической промышленности: Учебник. -М.: Химия, 1985. -352 с.
11. Теория автоматического управления: Учебник. В 2-х частях / Под ред. А.А.Воронова. М.: Высш.шк., 1986. -Ч.1. - 367 с. - Ч.2. -504 с.
12. Аязян Г.К. Расчет автоматических систем с типовыми алгоритмами регулирования:
Учеб. пособие -Уфа: Изд-во УНИ, 1986. -135 с.
13. Веревкин А.П., Попков В.Ф. Технические средства автоматизации. Исполнительные
устройства: Учеб. пособие -Уфа: Изд-во УНИ, 1996. -95 с.
Интернет ресурс
1. http://twt.mpei.ac.ru/MAS/Worksheets/Rotach/index.html
Домашние задания
по предмету
«Системы автоматического управления»
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 1
1. По заданным дифференциальным уравнениям определить
1 операторные уравнения при нулевых начальных условиях,
2 передаточные функции,
3 структурные схемы звеньев,
d3 y
dy
df
d2y
d 3 y dy dx
2
x
0
4
2
2 x 10f
3
2
dt
dt
dt 3 dt dt
а) dt
;
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 8
W(s) 2
s 5 .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1
2
3
4
5
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
Фз(s) – по заданию,
Фв(s) – по возмущению,
ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c П- законом регулирования и передаточной функцией вида
Wp = 4.
О - объект управления, описываемый дифференциальным уравнением
d3y
dt
Подготовил С.Чекрыжов
3
d2y
dt
2
2
d 2u
dt
2
3
du
u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 2
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2y
dx
du
d2y
dy
du
y
3
x
2
f
6
3 2y
3f
2
2
dt
dt ;
dt
dt
а) dt
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
2s 1
W (s)
s ( s 2 3) .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c П- законом регулирования и передаточной функцией вида
Wp = 4.
О - объект управления, описываемый дифференциальным уравнением
d3y
dy
d 2 u du
7
8
9 y
u
dt
dt3
dt 2
dt 2 dt
Подготовил С.Чекрыжов
d2y
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 3
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
dx
d2y
dy
du
df
y 4u 2 f 0.1
5 2 3 0.5 y 2
4u
dt ;
dt
dt
dt .
а) dt
б) dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
(s 2)(s 2 3) .
2
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
4
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
16
d3y
dt3
8
d2y
dt 2
dy du
u
dt dt
Подготовил С.Чекрыжов
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 4
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d 2 y dy
du
d2y
dy
df
y
6
u
16
y 8 5 7f x
2
2
dt
dt
dt
dt
dt
а) dt
;
б)
.
2. По заданной передаточной функции записать дифференциальное уравнение:
5
W (s) 2
2s 3s 16 .
4
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
5
Wp = 5 + s .
О - объект управления, описываемый дифференциальным уравнением
12
d3y
dt3
10
d2y
dt 2
2
dy
u
dt
Подготовил С.Чекрыжов
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 5
По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
1.
d2y
dx
du
d2y
dy
du
5
y
2
x
y
3x 2 f
2
2
dt
dt ;
dt
dt .
а) d t
б) dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
(s 2)(s 2 3) .
6
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
4
Wp = 4 + s .
О - объект управления, описываемый дифференциальным уравнением
16
Подготовил С.Чекрыжов
d3y
dt3
8
d2y
dt 2
dy du
u
dt dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 6
1. По заданным дифференциальным уравнениям
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2y
dy
du
d y d 2 y dy
du
6
3 y
2u
y
2
2
3
2
dt
dt
dt
dt ;
dt
а) dt
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
2s 1
W (s) 2
s 3s 12 .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 5 + s .
О - объект управления, описываемый дифференциальным уравнением
4
Подготовил С.Чекрыжов
d3y
dt3
2
d2y
dt 2
dy
u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 7
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
d2y
df
d3 y
dy
df
3 2 2u 3 f
2 x
0
3
dt
dt
dt
dt
dt
а)
; б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
s2 1
W(s)
(s 3)(s 2)(s 0.5) .
y
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
8
d3 y
dt
Подготовил С.Чекрыжов
3
6
d2y
dt
2
dy
8u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 8
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2y
dy
du
df
dy d 2 y
dx
3
0
,
5
y
2
4
u
2
2 4 y 2 x 0
2
dt
dt
dt ; б)
dt dt
dt
а) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
5
W (s)
4s
s 3 s 1 .
3
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 2 + s .
О - объект управления, описываемый дифференциальным уравнением
27
d3y
dt
Подготовил С.Чекрыжов
3
27
d2y
dt
2
9
dy
y 5u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 9
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
dx
d2y
dy
du
2 y 4u 2 f 0.1
3 2y
3f
2
dt .
dt
dt
а) dt
;
б) dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s 10
W ( s)
(s 2)(s 5) .
6
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R)
с настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c П- законом регулирования и передаточной функцией вида
Wp =0,5.
О - объект управления, описываемый дифференциальным уравнением
4
Подготовил С.Чекрыжов
d3y
dt3
5
d2y
dt 2
6
dy
du
y
u
dt
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 10
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d 2 x d 2 y dy
d2 f
d2y
dy
dx
y2 2 2
3x 2
4 2 5 y 4 u 5f
dt
dt
dt
dt ;
dt
dt
а)
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 4
W ( s) 2
(s 1)(s 2) .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
Wp = 8.
О - объект управления, описываемый дифференциальным уравнением
7
d3y
dt
3
8
d2y
dt
2
9
dy
du
y5 u
dt
dt
Подготовил С.Чекрыжов
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 11
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2y
dy
df
d3y
d2y
dy df
4
5
3
f
0
10
y
2
4 3x 4
3
2
2
dt dt
dt
dt .
dt
dt
dt
а)
;
б)
2. По заданной передаточной функции записать дифференциальное уравнение:
5s 2
W ( s)
( s 1)( s 2 3) .
1.25
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 4 + s .
О - объект управления, описываемый дифференциальным уравнением
4
Подготовил С.Чекрыжов
d2y
dt 2
6
dy
2y 4u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 12
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
d2y d3y
df
d2y
dx
4 2 3 3 2f x
4 2 12 y 2 x f
dt
dt
dt
dt
а) dt
;
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 1
W ( s)
( s 11)( s 7) .
3
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c И- законом регулирования и передаточной функцией вида
3
Wp = s .
О - объект управления, описываемый дифференциальным уравнением
2
d3y
dt3
3
d2y
dt 2
dy d 2 u
du
4 u
dt dt 2
dt
Подготовил С.Чекрыжов
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 13
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d3y
d2y
dy
d 2u
d 3 y dx
d 2u
2
2
u
2
y
9
f
3
3
dt
dt
dt 2
dt 2 ;
dt 3
dt 2 .
а) dt
б)
2. По заданной передаточной функции записать дифференциальное уравнение:
s4
W ( s)
(s 1)(s 2 12) .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
4
d2y
dt
Подготовил С.Чекрыжов
2
5
dy
y 2u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 14
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2 y
dx
du
d 3 y d 2 y dy
du
y
3
x
2
f
2
y2
2
3
dt
dt ;
dt
dt .
dt
а) dt
б) dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2 s 1
W(s)
(s 2)(s 3) .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
10
d3y
dt 3
7
d2y
dt 2
dy
4u
dt
Подготовил С.Чекрыжов
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 15
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
dx
d2y
dy
du
df
y 4u 2 f 0.1
5 2 3 0.5 y 2
4u
dt ;
dt
dt
dt .
а) dt
б) dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
(s 2)(s 2 3) .
2
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 5 + s .
О - объект управления, описываемый дифференциальным уравнением
4
d3y
dt3
8
d2y
dt 2
5
dy
y 4u
dt
Подготовил С.Чекрыжов
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 16
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
d2 y
df
dy d 2 y
dx
y
3 2 2u 3 f
2 2 x 4y 0
dt
dt
dt
dt dt
dt
а)
;
б)
.
2. По заданной передаточной функции записать дифференциальное уравнение:
3s
W (s) 2
s 2s 5 .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
2
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 0,5 + s .
О - объект управления, описываемый дифференциальным уравнением
4
d2y
dt
Подготовил С.Чекрыжов
2
5
dy
y 2u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 17
1. По заданным дифференциальным уравнениям
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d3y
dy
df
d2y
d 3 y dy dx
2
x
0
4
2
2 x 10 f
3
2
dt
dt
dt 3 dt dt
а) dt
; б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
s9
W (s)
s ( s 2 3) .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
.
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
25
d3y
dt
Подготовил С.Чекрыжов
3
10
d2y
dt
2
dy
2u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 18
1. По заданным дифференциальным уравнениям
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d 2 y dy
du
d2y
dy
df
y
6
u
16
y 8 5 7 f x
2
2
dt
dt
dt
dt
dt
а) dt
;
б)
.
2. По заданной передаточной функции записать дифференциальное уравнение:
s5
W (s)
3( s 2) s 2 .
4
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
Требуется определить:
1.
2.
3.
4.
5.
6.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c И- законом регулирования и передаточной функцией вида
3
Wp = s .
О - объект управления, описываемый дифференциальным уравнением
4
Подготовил С.Чекрыжов
d2y
dt 2
dy
du
2 u
dt
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 19
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d 2 x d 2 y dy
d2 f
d2y
dy
dx
3
x
4
5 y 4 u 5f
2
2
2
2
dt
dt
dt
dt ;
dt
dt
а)
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 2
W ( s)
( s 1)( s 2 5) .
y2
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
10
Подготовил С.Чекрыжов
d3y
dt3
7
d2y
dt 2
dy
8u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 20
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
dy
dx
d2y
dx
3 6y
x8f
12 y 2 x f
2
dt
dt
а) dt
;
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
(s 2)(s 2 3) .
4
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
Wp = 2.
О - объект управления, описываемый дифференциальным уравнением
3
d3y
dt
Подготовил С.Чекрыжов
3
2
d2y
dt
2
4
dy
du
y4
u
dt
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 21
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2y
dy
df
dy
d2y d3y
df
4
3
x
4
5
u
3
4
3 3 2f x
2
2
dt
dt
dt
dt
dt
dt
а)
; б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
s 1
W ( s)
(s 1)(s 2 3s) .
10y 2
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 1 + s .
О - объект управления, описываемый дифференциальным уравнением
4
Подготовил С.Чекрыжов
d2y
dt 2
2
dy
y 3u
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 22
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d3y
d2y
dy
d 2u
d 3 y dx
d 2u
2
2
u
2
y
9
f
3
3
dt
dt
dt 2
dt 2 ;
dt 3
dt 2 .
а) dt
б)
2. По заданной передаточной функции записать дифференциальное уравнение:
s5
W ( s) 2
s 2s 7 .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
6.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
устойчивость системы
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 2 + s .
ОУ - объект управления, описываемый дифференциальным уравнением
2
Подготовил С.Чекрыжов
d3y
dt3
3
d2y
dt 2
dy d 2 u
du
4 u
dt dt 2
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 23
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d3y
dy
df
d2y
dy
dx
2
x
0
4
5 y 4 u 5f
3
2
dt
dt
dt
dt
а) dt
;
б) dt
.
2. По заданной передаточной функции записать дифференциальное уравнение:
2s
W (s) 3
2
s 3s 4s 10 .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c И- законом регулирования и передаточной функцией вида
3
Wp = s .
О - объект управления, описываемый дифференциальным уравнением
4
Подготовил С.Чекрыжов
d2y
dt 2
5
dy
yu
dt
RAR1570 Automaatjuhtimissüsteemid
Kodutöö
Задание № 24
1. По заданным дифференциальным уравнениям определить
1. операторные уравнения при нулевых начальных условиях,
2. передаточные функции,
3. структурные схемы звеньев,
d2y
dx
du
y
3x 2 f
2
dt
dt ;
а) dt
d y d 2 y dy
du
2 y2
3
dt
dt .
dt
б) dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2s 1
W ( s)
( s 2)( s 3) .
3. Дана одноконтурная АСР, для которой известна передаточная функция регулятора (R) с
настройками и дифференциальное уравнение объекта управления (О).
Требуется определить:
1.
2.
3.
4.
5.
передаточную функцию разомкнутой системы W∞(s),
характеристическое выражение замкнутой системы (ХВЗС),
передаточные функции замкнутой системы
a. Фз(s) – по заданию,
b. Фв(s) – по возмущению,
c. ФЕ(s) – по ошибке,
коэффициенты усиления АСР,
примерный вид переходных процессов по заданию, ошибке и возмущению,
Регулятор - R c ПИ- законом регулирования и передаточной функцией вида
1
Wp = 2 + s .
ОУ - объект управления, описываемый дифференциальным уравнением
d2y
dt 2
3
dy
yu
dt
Подготовил С.Чекрыжов
Практическая работа № 1
Варианты заданий
Вариант № 1
Р - ПИ-регулятор с ПФ вида
4
;
s
d3y
d 2 y dy du
16 3 8 2
u.
dt dt
dt
dt
Wp = 4 +
дифференциальное уравнение ОУ:
Вариант № 2
Р - ПИ-регулятор с ПФ вида
дифференциальное уравнение ОУ:
Вариант № 3
Р - П-регулятор с ПФ вида
1
;
s
Wp = 5 +
d3y
4
dt
2
3
d2y
dt
2
dy
u.
dt
Wp = 0,5;
дифференциальное уравнение ОУ:
d3y
4
dt
5
3
d2y
dt
2
6
dy
du
y
u.
dt
dt
8
Вариант № 4
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 2 +
дифференциальное уравнение ОУ:
27
d3y
dt 3
27
d2y
dt 2
9
dy
y 5u .
dt
Вариант № 5
Р - ПИ-регулятор с ПФ вида
дифференциальное уравнение ОУ:
Вариант № 6
Р - П-регулятор с ПФ вида
1
;
s
Wp = 1 +
8
d3y
d2y
6
dt 3
dt 2
dy
8u .
dt
Wp = 4;
d3y
дифференциальное уравнение ОУ:
dt
3
d2y
dt
2
2
d 2u
dt
2
3
du
u.
dt
Вариант № 7
Р - ПИ-регулятор с ПФ вида
дифференциальное уравнение ОУ:
Вариант № 8
Р - П-регулятор с ПФ вида
5
;
s
d3y
d2y
dy
12 3 10 2 2
u.
dt
dt
dt
Wp = 5 +
Wp = 8;
дифференциальное уравнение ОУ: 7
d3y
dt 3
8
d2y
dt 2
9
dy
du
y5
u.
dt
dt
Вариант № 9
Р - ПИ-регулятор с ПФ вида
Wp = 4 +
дифференциальное уравнение ОУ:
4
Вариант № 10
Р - И-регулятор с ПФ вида
Wp =
3
;
s
1
;
s
d2y
dt
2
6
dy
2 y 4u .
dt
дифференциальное уравнение ОУ:
d3y
2
dt
3
3
d2y
dt
2
dy d 2 u
du
4
u .
dt dt 2
dt
Вариант № 11
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 1 +
дифференциальное уравнение ОУ:
d2y
4
dt
5
2
dy
y 2u .
dt
9
Вариант № 12
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 1 +
дифференциальное уравнение ОУ:
d3y
10
dt
3
7
d2y
dt
2
dy
4u .
dt
Вариант № 13
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 5 +
дифференциальное уравнение ОУ:
d3y
4
dt
8
3
d2y
dt
2
dy
y 4u .
dt
5
Вариант № 14
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 1 +
дифференциальное уравнение ОУ:
25
d3y
dt
3
10
d2y
dt
2
dy
2u .
dt
Вариант № 15
Р - И-регулятор с ПФ вида
Wp =
дифференциальное уравнение ОУ:
3
;
s
d2y
4
dt
2
dy
du
2
u.
dt
dt
Вариант № 16
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 1 +
дифференциальное уравнение ОУ:
10
d3y
dt
3
7
d2y
dt
2
dy
8u .
dt
Вариант № 17
Р - ПИ-регулятор с ПФ вида
Wp = 1 +
дифференциальное уравнение ОУ:
Вариант № 18
Р - П-регулятор с ПФ вида
dt 2
2
dy
y 3u .
dt
3
d3y
dt
3
2
d2y
dt
2
4
dy
du
y4
u.
dt
dt
9
dy
d 2 u du
y 2
u.
dt
dt
dt
Wp = 4;
дифференциальное уравнение ОУ:
7
10
Вариант № 20
Р - И-регулятор с ПФ вида
d2y
Wp = 2;
дифференциальное уравнение ОУ:
Вариант № 19
Р - П-регулятор с ПФ вида
4
1
;
s
Wp =
3
;
s
d3y
dt 3
8
d2y
dt 2
дифференциальное уравнение ОУ:
d2y
4
dt
5
2
dy
yu.
dt
Вариант № 21
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 2 +
дифференциальное уравнение ОУ:
d2y
dt
2
3
dy
yu.
dt
Вариант № 22
Р - ПИ-регулятор с ПФ вида
4
;
s
d3y
d 2 y dy du
16 3 8 2
u.
dt dt
dt
dt
Wp = 1 +
дифференциальное уравнение ОУ:
Вариант № 23
Р - ПИ-регулятор с ПФ вида
дифференциальное уравнение ОУ:
Вариант № 24
Р - П-регулятор с ПФ вида
1
;
s
Wp = 0,5 +
d3y
4
dt
3
2
d2y
dt
2
dy
u.
dt
Wp = 0,1;
дифференциальное уравнение ОУ:
d3y
4
dt
3
5
d2y
dt
2
6
dy
du
y
u.
dt
dt
Вариант № 25
Р - ПИ-регулятор с ПФ вида
1
;
s
Wp = 0,2 +
дифференциальное уравнение ОУ:
27
d3y
dt
3
27
d2y
dt
2
9
dy
y 5u .
dt
Вариант № 26
Р - ПИ-регулятор с ПФ вида
Wp = 2 +
дифференциальное уравнение ОУ:
8
1
;
s
d3y
dt
3
6
d2y
dt
2
dy
8u .
dt
11
Практическая работа № 3
По табличным данным построить переходную кривую объекта, определить
параметры передаточной функции объекта, рассчитать настройки ПИД-регулятора,
обеспечивающие 20%-е перерегулирование.
Вариант № 1
X = 15 кПа; Y = 24 С; = 1 мин
0
1
2
3
4
5
6
7
8
9
t, мин
0,0 4,4 8,8 12,8 16,0 18,8 21,0 22,2 23,8 24,0
Y
Вариант № 2
Xвх = 15 кПа;
Y = 150 С; зап = 0,15 мин
t, 0,00 0,25 0,50 0,75 1,00 1,25 1,50 1,75 2,00 2,25 2,50 2,75 3,00
мин
Y
0
9
20
34
52
79 108 124 136 143 148 149,7 150
Вариант № 3
Xвх = 90 м3/час;
Y = 45 С; зап = 0,1 мин
3
4
5
6
7
8
9
10 11 12
t, мин 0 1 2
Y 0,0 5,5 16,0 25,5 31,5 35,0 38,0 40,0 41,7 43,0 43,8 44,5 45,0
Вариант № 4
Xвх = 25 кПа; Y = 8 С; зап = 1 мин
t, мин 0 1 2 3 4 5 6 7
Y 0,0 0,1 1,3 2,7 3,9 4,9 5,7 6,3
0 0 0 5 0 0 0 0
t, мин 8 9 10 11 12 13 14 15
Y 6,7 7,2 7,5 7,7 7,8 7,9 8,00 8,00
0 0 0 0 5 5
Вариант № 5
Xвх = 0,5 кг/см2; Y = 36 С;
зап = 1 мин
4
5
6
7
8
9
10
t, мин 0 1 2 3
Y 0 4,0 8,3 12,8 16,5 19,2 21,3 23,3 25,0 27,0 28,5
t, мин 11
12
13
14
15
16
17
18
19
20
21
Y 30,0 30,8 31,7 32,4 33,0 33,6 34,1 34,7 35,0 35,5 36,0
12
Вариант № 6
Xвх = 10 кПа;
t, мин 1 2 3
Y = 7 С;
4 5
6
Y 0,3 1,1 2,4 3,6 4,45 5,1
Вариант № 7
Xвх = 25 кПа;
Y = 7,5 С;
зап = 0,35 мин
7
8
9
5,7 6,2 6,5
10
11
12
6,75 6,9 7,0
зап = 0,5 мин
t, мин 0
Y 0
0,5 2 4 6 8
0 0,3 0,9 2,3 4
10 12 14
4,9 5,6 6,1
t, мин 16 18 20 22 24 26 28 30
Y 6,6 6,9 7,2 7,4 7,5 7,5 7,5 7,5
Вариант № 8
Xвх = 4 кПа; Y = 0,138 %;
зап = 34 сек
30 60
90
120 150 180 210 240 270 300
t, мин 0
Y 1,261 1,26 1,269 1,291 1,315 1,338 1,357 1,368 1,376 1,380 1,380
Вариант № 9
Xвх = 5,5 кПа; Y = 0,149 %;
зап = 40 сек
50
80
110 140 170 200
t, мин 0 20
Y 0
230
260
0,009 0,032 0,060 0,089 0,116 0,130 0,141 0,149 0,149
Вариант № 10
Xвх = 20 кПа; Y = 23 С;
зап = 0,5 мин
1
2
3
4
5
6
7 8
t, мин 0
0
0,6
1,8
3,6
5,8
8,2
11,2
14 16,4
Y
10 11 12
t, мин 9
Y 18,2 20,2 21,4 22
Вариант № 11
Xвх = 20 кПа;
1
t, мин 0
2
Y 0
1,0
0,3
13 14 15
22,4 22,6 22,8
16
23
зап = 0,5 мин
3
4
5
2,3 4,7
8,4
6
7
8
13,2
19,3
25,7
13
Вариант № 12
Xвх = 20 кПа;
Y = 30 С;
t, мин 0
1
2
3
4
10
11
12
Y 0
2
5
8
10 12 15 18 25 27 30
30
30
Вариант № 13
Xвх = 10 кПа;
1
t, мин 0
2
Y 0
0,5
0,15
5
6
зап = 1 мин
7
8
зап = 0,5 мин
3
4
5
1,15 2,35
4,2
9
6
7
8
6,6
9,65
12,9
Вариант № 14
Xвх = 30 кПа;
Y = 7,0 С;
зап = 0,2 мин
t, мин 0
0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0 2,2
Y 0
0,42 1,33 2,31 3,43 4,55 5,46 6,02 6,44 6,72 6,86 7,00
Вариант № 15
Xвх = 25 кПа;
Y = 50 С;
8
зап = 2 мин 45 сек
t, мин 0
2
4
6
10 12 14
16
18
20
22
24
Y 0
1
5
13 21 30 36 41
45
48
49
50
50
Вариант № 16
Xвх = 9,6 м3/час; Y = Н мм.вод.ст.;
10
15
20 25
t, мин 0 5
Y 0
-1
зап = 1 мин
30
35
-2,5 -2,37
1,625 2,125
2,517 2,512
t, мин 40 45
50
55
60
65
0,875 2,16 3,5
Y -2,0 1,375 0,375
14
Вариант № 17
Xвх = 8 кПа; Y = 6 С;
зап = 2 мин
1
2
3
4
5
6
7
t, мин 0
Y
0
t, мин 10
Y
8
9
0,3 0,9 2
3,2 3,9 4,4 4,8 5,1 5,3
11
14
12
13
15
16
17
18 19
5,5 5,7 5,8 5,85 5,9 5,93 5,97 5,99 6
6
Вариант № 18
Xвх = 15 кПа; Y = 3,8 т/час;
зап = 3 мин
15 21 27 33 39 45 51 57 63 69 75 78
t, мин 0 9
Y 0 0,65 2,23 2,85 3,2 3,4 3,53 3,62 3,67 3,72 3,75 3,77 3,79 3,8
Вариант № 19
Xвх = 20 кПа; Y = 22,6 С;
1
2
3
t, мин 0
зап = 30 сек
4
5
6
7
Y
11,6
17,5
0
2,2
6
9,2
13,8
15,7
t, мин 8
9
10
11
12
13
14
Y
20,4
21,3
21,9
22,3
22,5
22,6
19,1
Вариант № 20
Xвх = 10 кПа; Y = 5,5 С;
2 3 4
5
t, мин 0 1
Y 0
11
12
0,133 0,7 2,2 3,733 4,62 5,0 5,23 5,34 5,4 5,43 5,47 5,5
Вариант № 21
Xвх = 30 кПа; Y = 6,5 С;
t, мин 0 1 2 3 4 5 6
Y 0
зап = 0,55 мин
6 7
8
9 10
7
зап = 1 мин
8 9
10
11
0,5 1,6 3,0 4,3 5,2 5,6 6,0 6,2 6,35 6,45 6,5
Второй вариант домашней работы
Задачи для домашней работы № 1
Задание № 1
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев,.
d2y
dx
du
d2y
dy
du
5
y
2
x
y
3x 2 f
;
б)
.
2
2
dt
dt
dt
dt
dt
d t
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
.
( s 2)( s 2 3)
Задание № 2
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев
а) 6
d y d 2 y dy
du
d2y
dy
du
y
2
6
3 y
2u .
;
б)
3
2
2
dt
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2s 1
W (s) 2
.
s 3s 12
а)
Задание № 3
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
dy
dx
d2y
dy
du
а) 6 2 3 2 y
б) 2 y 4u 2 f 0.1 .
3f ;
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s 10
W ( s)
.
( s 2)( s 5)
Задание № 4
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев
d2y
dy
du
df
dy d 2 y
dx
а) 5 2 3 0,5 y 2
; б) 2 2 4 y 2 x 0 .
4u
dt
dt
dt
dt dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
4s
W (s) 3
.
s 3 s 1
Задание № 5
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев/
dy
d2y
df
d3y
dy
df
а) y
3 2 2 u 3 f ; б) 3 2 x
0.
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s2 1
.
W(s)
(s 3)(s 2)(s 0.5)
Задание № 6
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d3y
dy
df
d2y
d 3 y dy dx
0;
2 x 10f .
а) 3 2 x
б) 4 2 2 3
dt
dt
dt dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 8
W (s) 2
.
s 5
Задание № 7
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d 2 y dy
du
d2y
dy
df
y6 u;
а) 4 2
б) 16 2 y 8 5 7f x .
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
5
W (s) 2
.
2s 3s 16
Задание № 8
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев,
характеристические уравнения и их корни.
Показать распределение корней на комплексной плоскости.
Оценить устойчивость каждого из звеньев.
d 2 x d 2 y dy
d2 f
d2y
dy
dx
а) y 2 2 2
б) 4 2 5 y 4 u 5 f .
3x 2 ;
dt
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 4
W ( s) 2
.
( s 1)( s 2)
Задание № 9
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев,
характеристические уравнения и их корни.
Показать распределение корней на комплексной плоскости.
Оценить устойчивость каждого из звеньев.
d2y
dy
df
d3y
d2y
dy df
3f 0 ;
а) 1.25 3 4 2 5
б) 10 y 2 2 4 3x 4 .
dt dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
5s 2
W ( s)
.
( s 1)( s 2 3)
Задание № 10
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев,
dy
d2y d3y
df
d2y
dx
4 2 3 3 2f x;
б) 4 2 12 y 2 x f .
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 1
.
W ( s)
( s 11)( s 7)
а) 3
Задание № 11
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d3y
d2y
dy
d 2u
d 3 y dx
d 2u
2 2 2 u 2 2 ;
f 3 2 .
а)
б) y 9 3
dt
dt
dt 3
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s4
W ( s)
.
( s 1)( s 2 12)
Задание № 12
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
Оценить устойчивость каждого из звеньев.
d2y
dx
du
d 3 y d 2 y dy
du
а) 2 y
;
б) 3 2
3 x 2 f
y2 .
dt
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2 s 1
.
W(s)
(s 2)(s 3)
Задание № 13
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
dy
dx
d2y
dy
du
df
а) 2 y 4u 2 f 0.1 ;
б) 5 2 3 0.5 y 2
.
4u
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
.
( s 2)( s 2 3)
Задание № 14
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
dy d 2 y
dx
dy
d2y
df
3 2 2u 3 f .
а) 2 2 2 x 4 y 0 ;
б) y
dt dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s
W (s) 2
.
s 2s 5
Задание № 15
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d3y
dy
df
d2y
d 3 y dy dx
2
x
0
4
2
2 x 10 f .
а)
;
б)
dt
dt
dt 3
dt 2
dt 3 dt dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s9
W ( s)
.
s ( s 2 3)
Задание № 16
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев..
d 2 y dy
du
d2y
dy
df
y6
u;
5 7f x.
а) 4 2
б) 16 2 y 8
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s 5
W ( s)
.
3( s 2) s 2
Задание № 17
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d 2 x d 2 y dy
d2 f
d2y
dy
dx
;
б)
3
x
4
5 y 4 u 5f .
2
2
2
2
dt
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 2
.
W ( s)
( s 1)( s 2 5)
а) y 2
Задание № 18
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d2y
dy
df
dy
d2y d3y
df
а) 10 y 2 2 4 3x 4 5u ; б) 3 4 2 3 3 2 f x .
dt
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
s 1
W ( s)
.
( s 1)( s 2 3s )
Задание № 19
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
dy
dx
d2y
dx
x8f .
а) 4 2 12 y 2 x f ;
б) 3 6 y
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
.
( s 2)( s 2 3)
Задание № 20
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d3y
d2y
dy
d 2u
d 3 y dx
d 2u
2
2
u
2
y
9
f
3
а)
;
б)
.
dt
dt
dt 3
dt 2
dt 2
dt 3
dt 2
2. По заданной передаточной функции записать дифференциальное уравнение:
s5
W ( s) 2
.
s 2s 7
Задание № 21
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d2y
dx
du
d2y
dy
du
y
3
x
2
f
6
3 2y
3f .
а)
;
б)
2
2
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2s 1
W ( s)
.
s ( s 2 3)
Задание № 22
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d3y
dy
df
d2y
dy
dx
2
x
0
4
5 y 4 u 5f .
а)
;
б)
3
2
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2s
W (s) 3
.
2
s 3s 4s 10
Задание № 23
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
d2y
dx
du
d y d 2 y dy
du
а)
;
б)
y
3
x
2
f
2
y2 .
2
3
dt
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
2s 1
.
W ( s)
( s 2)( s 3)
Задание № 24
1. По заданным дифференциальным уравнениям определить операторные уравнения при
нулевых начальных условиях, передаточные функции, структурные схемы звеньев.
dy
dx
d2y
dy
du
df
4u
а) 2 y 4u 2 f 0.1 ;
б) 5 2 3 0.5 y 2
.
dt
dt
dt
dt
dt
dt
2. По заданной передаточной функции записать дифференциальное уравнение:
3s 5
W ( s)
.
( s 2)( s 2 3)