В настоящее время в некоторых специфических областях
реклама

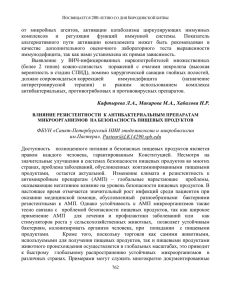
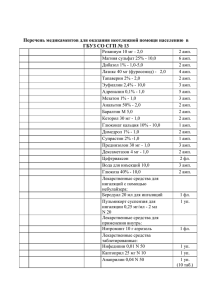
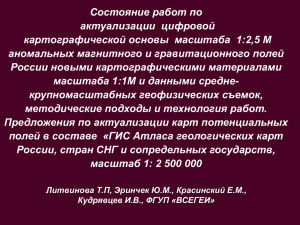
В настоящее время в некоторых специфических областях электропривода используются двигатели и генераторы с подвесом роторов в активных магнитных подшипниках (АМП). Работа АМП основана на принципе подвеса ферромагнитных тел в управляемом магнитном поле. Активный магнитный подшипник – это управляемое электромагнитное устройство, которое удерживает вращающуюся часть машины (ротор) в заданном положении относительно неподвижной части (статора). Магнитные силы притяжения, действующие на ротор со стороны электромагнитов, управляются с помощью электронной системы управления. Поэтому конструктивно АМП состоит из двух основных частей: - электромеханической части, или собственно подшипника; - электронной системы управления. Система управления АМП Датчики положения Усилитель мощности Задающий сигнал + Регулятор - + - Ротор - + Усилитель мощности Электромагнит Сигнал с датчика Подшипник включает в себя ротор, подвешенный в магнитном поле, закрепленные на статоре электромагниты и датчики положения ротора. Механический контакт отсутствует. Смещения между ротором и ротора из заданного неподвижным положения статором равновесия измеряются датчиками положения. Сигнал с датчиков обрабатывается электронной системой управления таким образом, что магнитные силы возвращают ротор в исходное положение. Электронная система управления включает в себя регулятор и усилители мощности. Используя информацию, поступающую с датчиков положения, эта система управляет положением ротора путем изменения токов в электромагнитах. Соответствующий выбор закона управления токами позволяет обеспечить устойчивое положение ротора и его центровку в зазоре, а также получить желаемые значения жесткости и демпфирования подвеса. Такая система, естественно, дороже, чем с применением обычных шарикоподшипников, однако она позволяет получить ряд неоспоримых преимуществ: практически неограниченный ресурс; снижение расходов на обслуживание; малый коэффициент трения; малая отдача теплоты в окружающую среду; возможность работы на высоких скоростях, в вакууме, при низких и высоких температурах, в условиях агрессивных сред, в сверхчистых технологиях; возможность создания контролируемых микроперемещений ротора в зазоре; возможность активного гашения колебаний ротора; способность вращения ротора вокруг оси инерции (самоцентрирование ротора) и отсутствие вибраций вследствие дисбаланса; отсутствие шума; контроль нагрузок на подшипники, положения дисбаланса ротора. Данные преимущества позволяют использовать их там, где применение шарикоподшипников невозможно. В конце 1980-ых была предложена новая концепция бесподшипниковых электрических машин (БЭМ). Идея БЭМ состоит в том, чтобы объединить электродвигатель и АМП. В этом случае в зазоре должно действовать такое электромагнитное поле, при взаимодействии которого с ротором возникали бы как вращающий момент, так и управляемые радиальные силы. Это позволяет уменьшить длину ротора, что главным образом сказывается на увеличении критических скоростей и расширении диапазона частот вращения, а также улучшении массогабаритных показателей и удешевлению по сравнению с АМП. АМП Электродвигатель БЭМ БЭМ Осевой АМП АМП Осевой АМП Система управления БЭМ несколько сложнее чем у АМП. Это связано с тем, что требуется создавать в одном модуле как силу для подвеса, так и вращающий момент двигателя. Бесподшипниковая машина состоит из электромеханической части и системы управления. Электромеханическая часть включает в себя 2 одинаковых модуля бесподшипниковой машины (БМ1 и БМ2), в которых создаются силы обеспечивающие подвес ротора и вращающий момент. Осевой подшипник (ОП) обеспечивает удержание ротора по оси Z. Контроль положения ротора осуществляется двумя датчиками радиального положения (ДРП1 и ДРП2) и датчиком осевого положения (ДОП). Для управления приводом машины необходимо знать угол поворота ротора φ, который измеряет датчик угла (ДУ). Силы подвеса пропорциональны токам в силовых блоках подвеса. Токи в обмотках радиального подвеса задаются процессором DSP1, который обрабатывает входные сигналы положения ротора Х1, Y1, Х2, Y2 посредством ПИД - регулятора. Задающие сигналы Х*1, Y*1, Х*2, Y*2 поступают на силовой блок управления (БУ) радиальным подвесом, где и происходит формирование необходимых токов. Аналогично задаются токи в обмотках осевого подвеса процессором DSP2. Регулирование токов в обмотках привода осуществляется также процессором DSP2. Для этого на его входы подаются сигналы с датчиков углового положения и датчиков тока. Для индикации параметров служит ПК, связь с которым осуществляется через COM порт. Сферы применения БЭМ весьма широки: В электроприводах шлифовальных и фрезерных шпинделей с частотой вращения 30-120 тыс. об./мин. АМП позволяет обеспечить высокую производительность и качество обработки. Использование бесконтактного электропривода позволяет создавать компактные высокопроизводительные турбокомпрессоры и турбовентиляторы с высоким ресурсом работы и низким уровнем вибраций и шумов. Применение магнитных подшипников в криогенной технике обеспечивает повышение надежности работы и производительности высокооборотных турбодетандеров в условиях низких температур и больших перепадов давления. Одним из важных элементов технологии энергосбережения являются инерционные накопители энергии, имеющие рекордные удельные характеристики по сравнению с электрохимическими, сверхпроводящими, емкостными и другими накопителями. Малое энергопотребление и способность работать в вакууме при высоких скоростях позволяют использовать машины на магнитном подвесе в супермаховиках для накопления кинетической энергии. В текстильной промышленности актуальна проблема снижения уровня шумов. Использование АМП в прядильных веретенах позволяет снизить уровень шумов в прядильных цехах на 15 дБ. В балансировочных станках необходимы очень точные подшипники. С помощью АМП ось вращения ротора может стабилизироваться с точностью до 0,5 мкм. В больших турбинах важной проблемой является обеспечение перехода ротора через критические резонансные частоты. Использование АМП позволяет успешно демпфировать такие колебания. Важным применением АМП из-за малого трения и отсутствия смазки являются опоры подвижных частей в точных измерительных приборах, гироскопах, роботах, испытательных стендах и т.д. При этом подвижная часть, подвешенная в АМП, может совершать как вращательное, так и поступательное рабочее движение. Повышение частоты вращения в измельчающих агрегатах позволяет получать продукцию (порошки, смеси) с особыми физическими свойствами. АМП получили широкое внедрение в газовой промышленности зарубежных стран и России. Насосные станции на газовых магистралях зачастую располагаются в местах, труднодоступных для проведения технического обслуживания насосов (доставки и замены масла в подшипниках, замены изношенных частей и т.д.). Замена традиционных подшипников качения или скольжения на электромагнитные позволяет существенно увеличить ресурс работы.