Начало документа
реклама

1
ОСНОВНЫЕ ЗАКОНЫ ДИНАМИКИ
(Конспект лекций)
УчебныйКомплекс
Разработка:
Кафедра теоретической механики Московского автомобильно-дорожного института
(государственного технического университета):
Б.М. Додонов
Содержание
1
1. Понятие силы как меры механического действия
2
2. Законы Галилея−Ньютона
3
3. Характеристики систем сил
4
4.Условия равновесия свободного твердого тела.
5
5. Уравнения равновесия твердого тела:
6
6. Эквивалентные
7
7. Основная теорема статики.(Приведение произвольной системы сил к силе и паре. )
8
8. Частные случаи эквивалентных преобразований систем сил
9
10
План курса статики
системы
сил
2
3
Начало документа
ОСНОВНЫЕ ЗАКОНЫ ДИНАМИКИ
1. Понятие силы как меры механического действия
Сила ={точка приложения, численная величина, направление}.
вектор силы = { численная величина, направление }.
Момент силы относительно точки
M O (F ) r F .
FA
O
r
A
4
Начало документа
2. Законы Галилея−Ньютона
1. Закон инерции.
Материальная точка сохраняет равномерное и прямолинейное движение или находится в
состоянии покоя до тех пор, пока на нее не подействует сила.
2. Основное уравнение динамики (Закон пропорциональности силы и ускорения).
Сила, действующая на материальную точку, сообщает ей ускорение, которое пропорционально силе и направлено в сторону ее действия
ma F , где m масса точки, явля-
ющаяся мерой ее инертности.
Системы отсчета, в которых выполняются первый и второй законы динамики, называются
инерциальными. Инерциальность той или иной системы отсчета может быть проверена
только опытным путем.
3. Закон равенства действия и противодействия.
Два тела действуют друг на друга с силами, равными по величине и направленными в противоположные стороны по общей линии действия.
5
4. Закон независимости действия сил.
Материальная точка при действии на нее системы сил приобретает ускорение, равное
сумме ускорений, возникающих от действия каждой силы в отдельности.
a a1 a2 an ,
где mak Fk .
Откуда
ma
n
Fk
k 1
.
В частном случае двух сил эта аксиома представляет правило параллелограмма сил.
F1
F
F F1 F 2
F2
6
Начало документа
3. Характеристики систем сил:
Системой сил называется выделенная по какому-либо признаку совокупность сил
{F1,F2,......., Fk,}. Характеристиками системы сил являются:
а) Главный вектор
F Fk
.
б) Главный момент
M O rk F k
.
4. Условия равновесия свободного твердого тела.
Равновесие механической системы Состояние механической системы, при котором все
ее точки под действием приложенных сил остаются в покое по отношению к рассматриваемой
системе отсчета.
Примечание. Равновесие является частным случаем движения механической системы.
Уравновешенная
система сил- Система сил, которая, будучи приложенной, к сво-
бодному твердому телу, находящемуся в покое, не выводит его из этого состояния.
Уравновешивающая
система сил- Система сил, которая вместе с заданной другой си-
стемой сил составляет уравновешенную систему сил.
7
ТЕОРЕМА:
Для равновесия твердого тела необходимо и достаточно чтобы главный вектор и главный момент действующих на тело сил были равны нулю и угловая скорость была равна
нулю.
F 0, M
O
0, 0 F k 0;
Доказательство достаточности:
a k a O r k r k ;........... 0;
a k aO r k ;
mk a k F k ;
mk a k a k a O F k ( r k ) F k ;
m
m
m
k
a k a k a O F k ( r k ) F k ;
2
a
k
k a O F k ( r k F k );
2
a
k
k aO F M O ;
F 0, M O 0 mk a 2 k 0; ak 0;
8
Начало документа
5. Уравнения равновесия твердого тела:
F 0
xk
F k 0 F y k 0
F z k 0
M 0
xk
M k 0 M yk 0
M zk 0
9
Начало документа
6. Эквивалентные
Эквивалентными
системами
ту же уравновешивающую систему сил.
системы
сил
сил называются Системы сил, имеющие одну и
F ,F являются эквивалентными F F , если
(1)
Теорема. Две системы сил
(1)
(2)
k
k
k
(2)
k
у них равны главные векторы и главные моменты относительно одного и того же центра
(любого). F
(1)
F
(2)
F; M O
(1)
MO
(2)
M; .
Доказательство:
Каждую из данных систем сил можно уравновесить одной и той же уравновешивающей
системой сил, состоящей из одной силы, равной главному вектору с противоположным
знаком
F ; ,
и одной пары сил с моментом, равным главному моменту с противо-
M ; относительно выбранной точки приложения силы.
(1)
(2)
( F ) 0; F , F F ( F ) 0;
Fk
Fk
( M ) 0; M , F M ( M ) 0;
положным знаком
M
F
(1)
(1)
, F M
, F F
(1)
(1)
(2)
(2)
(2)
(2)
При действии любой из эквивалентных систем сил на свободное твердое тело его
движение из состояния покоя будет происходить по одному и тому же закону.
10
Начало документа
7. Основная теорема статики.(Приведение произвольной системы сил к силе и паре. )
Произвольная система сил
F
1,
эквивалента системе сил, состоящей из силы F
..F k , .
MO
женной в выбранном центре (О) и равной главному вектору, и пары с моментом
главному моменту заданной системы сил относительно выбранного центра:
F ..F . F
1,
k,
O
,M O
O
, прило-
, равным
.
Частный случай - Изменение точки приложения силы.
FO
O
MO
FA
B ,), F B ,
(
F
,
F
A
FA
FA
A
FB
A
B
B
F B
11
Начало документа
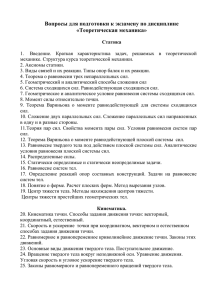
8. Частные случаи эквивалентных преобразований систем сил
8.1. Эквивалентные пары:
А) перенос пары в плоскости действия.
Б) перенос пары в параллельную плоскость.
В) изменение величины силы и пары при условии
Г) Сложение пар сил:
M
1
F (1) h1 F (2) h2 .
,....M k .... M M M k .
12
Начало документа
8.2. Приведение произвольной системы к простейшей системе.
Силовой винт= Динама. F 1, ..F k , .
M
||F
FO
M
M
F
1
O
2
*
F
.
F
F O* , M
O
O*
3
4
5
F O
6
F
O
O*
*
O
M
||F
F
F
1,
..F k , .
O
,M O
||F
FO,M ,M
(F
F
*
F O ,( F O , F O ) M
*
*
O
F
, F O ) 0, F O , M
F O,M
F
,M
||F
||F
13
Начало документа
8.3. Приведение системы сил к равнодействующей. F O M
1
FO
F
O
*
O
2
3
O*
M
4
F O
5
6
F
O
O*
*
O
F
F
1,
F
..F k , .
O
,M O
FO,M
F
(F , F
F
*
F O ,( F O , F O ) M
O
O
) 0, F
*
O
F
*
O
Равнодействующая
системы сил: Одна
сила, которая эквивалентна данной системе сил.
Уравновешивающая сила: Сила, прямо противоположная равнодействующей данной системы
сил.