Алгоритм многокамерного сопровождения г. Москва 15 – 17 марта 2011
реклама

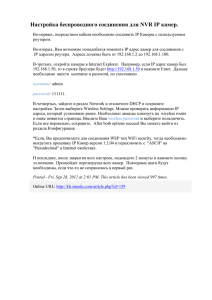
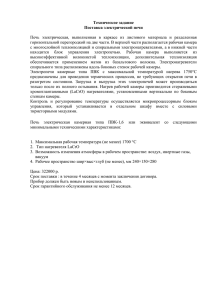
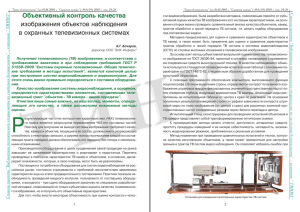
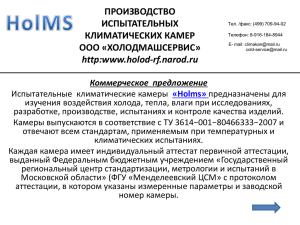
г. Москва 15 – 17 марта 2011 Научно-техническая конференция «Техническое зрение в системах управления – 2011» Алгоритм многокамерного сопровождения Птицын Н.В., Ермолаев И.Е., ООО «Синезис» Постановка задачи Комбинированое применение телевизионных и тепловизионных камер на железной дороге Мнокамерное (многоканальное) наблюдение за объектом ТВ камера 1 Сервер ТВ Камера 2 Тепловизор Проекция траектории на карту Траектория и объект ТВ камера 1 Сервер ТВ Камера 2 Тепловизор Задачи разрабатываемого алгоритма 1. Устранение избыточности и повторных срабатываний в зоне перекрытия 2. Повышения точности позиционирования объектов и применение правил на карте 3. Сопоставление тепловизиозонных и телевизионных изображений объекта 4. Сопровождение от камеры к камере для – автоматического переключения между камерами – автоматического наведения купольной камеры – анализа перемещений объекта по карте Распределенная обработка Встроенные алгоритмы Серверные алгоритмы Моделирование фона Детектирование объектов Сегментирование Вычисление признаков Корреляция данных от нескольких камер Получение многокамерной траектории на карте Тепловизионная камера со встроенной видеоаналитикой • Неохлождаемый ванадиевый микроболометр 384*288 пкс, 8 кадров/c Мониторинг ж/д полотна тепловизионной камерой • Зона контроля 100-800 м • 7° (В) x 5° (Ш) для объектива 100 мм Двуканальное видеоаналитическое устройство для ТВ-камер Ядро ARM9: 365 МГц Ядро DSP С64x+: 720 МГц Видео сопроцессор HDVICP Динамическая память 256 Мб Мониторинг ж/д полотна телевизионной камерой • Дальность действия до 80 метров • Сильно зависит от погодных условий Описание алгоритма на примере: охраняемый участок с 9 камерами Привязка камер к карте (калибровка по 4 узловым точкам) r – экранные координаты камеры R – глобальный координаты на карте A – искомая матрица преобразования Оценка параметров выборочной функции каждой камеры на этапе калибровки Перекрытие выборочных функций распределения по всем камерам Результаты работы алгоритма многокамерного сопровождения Траектория по данным пяти камер Аналитическое моделирование зоны покрытия камер Имитационное моделирование зон покрытия камер Результаты и выводы 1. Разработан алгоритм многокамерного сопровождения целей 2. Создана установка из 9 камер для испытаний алгоритма 3. Получены обобщенные траектория движения цели по данным нескольким камер 4. Задачей будущих исследований является оценка эффективности и точности разработанного алгоритма