Математическое технологических систем
реклама

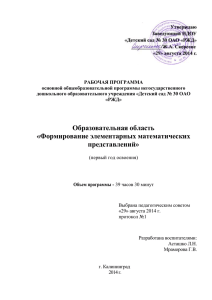
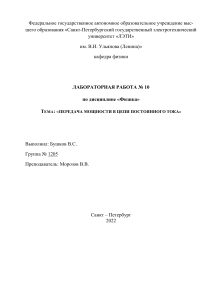
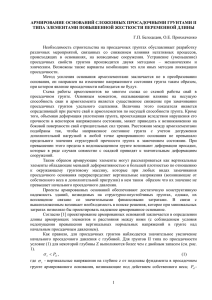
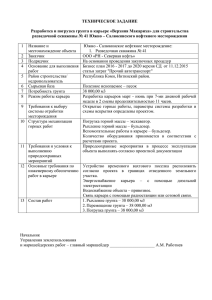
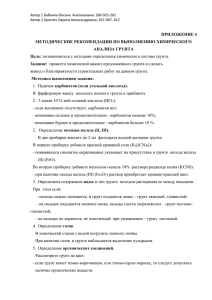
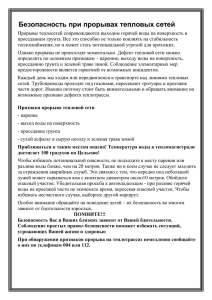
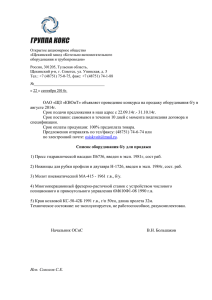
Карагандинский государственный технический университет Лекция 7. Математическое моделирование технико-технологических систем: особенности и методы решения проблем моделирования Структурная схема основных составляющих технологии производства работ на строительном объекте 1 Взаимосвязь исходных подсистем, составляющих технологию производства работ на строительном объекте 2 Формулирование требований к конечному результату технологии воздействия на обрабатываемую среду Обрабатываемая среда (свойства) Формирование представлений об обработанной среде и ее свойствах Средства механизации (инструмент) Организация производства работ Режимы работы средств механизации по рациональному воздействию на обрабатываемую среду Выбор средств механизации и их рациональных параметров и режимов работы для воздействия на конкретную среду Формирование рациональной последовательности воздействия средств механизации на обрабатываемую среду при условии обеспечения минимальной энергоемкости процесса 3 Формулирование требований к конечному результату технологии производства работ на строительном объекте Установление конечных требований к строительному объекту Выбор и обоснование рациональной технологической последовательности движения средств механизации на строительном объекте с учетом их рациональной технологии воздействия на обрабатываемую среду Общие требования к организации производства работ и контроль над качеством технологического процесса РАСЧЁТНАЯ СХЕМА УДАРНОГО ВЗАИМОДЕЙСТВИЯ РАБОЧЕГО ОРГАНА И ГРУНТА (ОДНОМЕРНАЯ МОДЕЛЬ) Допущения и ограничения, принятые в одномерной модели: • • • • • • • • грунт разбит на элементарные слои равной толщины l с одинаковыми свойствами; промежуточная плита отсутствует, удар наносится рабочим органом (РО) массой m1 по грунту; отсутствие деформаций грунта, связанных с фильтрацией и упругой деформацией воды; сжатие слоя грунта происходит за счёт уменьшения объёма воздушных пор (сжатие и/или частичное растворение в воде газообразной составляющей упругого полупространства (УП); площадь деформируемого слоя грунта равна площади РО; скорость РО и деформированных слоёв грунта изменяется дискретно от слоя к слою; сила трения боковой поверхности РО о грунт не учитывается; влияние приложенной нагрузки на нижележащие слои грунта проявляется после полной деформации вышележащих слоёв. МОДЕЛИРОВАНИЕ УДАРНОГО ПРОЦЕССА ВЗАИМОДЕЙСТВИЯ РАБОЧЕГО ОРГАНА С ГРУНТОМ T U Стр U Скл U A AТр , где Т – кинетическая энергия падающего рабочего органа, UСтр– структурная прочность деформируемого грунта, UСкл– потенциальная энергия упругой деформации скелета грунта, U – потенциальная энергия деформации (сжатия) грунта, А – работа по перемещению масс рабочего органа и ранее деформированных слоёв грунта на величину деформации Δl, Тр А – работа сил трения уплотненных слоёв грунта об окружающий недеформированный грунт на величине деформации Δl. Нескомпенсированная (остаточная) кинетическая энергия Ti’ после i-го слоя 3 l 2 Скл l 2 i3 (m1 i mСл ) Vi21 Тр Ti ' Ti Стр SСл l (m1 (i 1) mСл ) g li Fi li Ti1 2 Стр 2 ( i Стр ) 2 Условие прекращения процесса уплотнения Тр Ti , (U Стр U Скл U Ai Ai ) Кинетическая энергия падающего рабочего органа 3 n n n l 2 Скл l 2 i3 T n Стр S Сл l n m1 i 1 mСл gli FiТр li Tn 2 Стр i 1 2 i Стр i 1 i 1 где n – число элементарных слоёв. МОДЕЛИРОВАНИЕ ГРУНТА НЕНАРУШЕННОЙ СТРУКТУРЫ С.Р. Месчян k1 1 exp( k2 ) ( ) k1 1 exp( k2 ( стр )) ( ) 0,2564 1 exp( 2,03 107 ( стр )) Вар.3 0,05 1,20E+07 1,08E+07 9,62E+06 8,42E+06 7,22E+06 Напряж ение, Па Вар.2 1, 4 6,02E+06 0 4,82E+06 Вар.1 ( ) 0,0495 1 exp( 2,36 106 ( стр )) Вар.2 0,1 3,62E+06 3 Вар.1 2,42E+06 ( ) k1 1 exp( k2 ( стр )) k ( ) 0,2564 1 exp( 2.95 10 7 ) 0,2 0,15 1,22E+06 А.В. Грузин 0,3 0,25 1,70E+04 Относительная деформация Зависимость "Напряжение-Относительная деформация" Вар.3 Время удара, с m V i РО РО S Сл Па·с Модель вариант 1 (теор.) Модель вариант 2 (теор.) Модель вариант 3 (теор.) Экспериментальные данные проф. Хархуты Н.Я. Теоретические данные проф.Тарасова В.Н . 5 000 0,0150 0,0150 0,0150 0,015 0,016 10 000 0,0275 0,0272 0,0196 0,020 0,023 15 000 0,0374 0,0366 0,0254 0,025 0,029 20 000 0,0451 0,0435 0,0310 0,030 0,034 25 000 0,0506 0,0485 0,0360 0,035 0,038 МОДЕЛИРОВАНИЕ ПРОЦЕССА УДАРНОГО ВЗАИМОДЕЙСТВИЕ РАБОЧЕГО ОРГАНА И ГРУНТА (ДВУХМЕРНАЯ МОДЕЛЬ) Ж.В. Буссинеск 1 xz 1 2 x 21 r z 2r r z z 2 x ux F F xF yF 3 z x x y 2 2E r r r z r r z r 3 r z Многоцелевое навесное оборудование на базе экскаватора ЭО-2621: 1 – базовая машина; 2 – корпус-навеска гидромолота простого действия; 3 – активатор; 4 – рабочий орган yz 1 2 y 21 r z 2r r z z 2 y F F xF yF 3 z y x y 2 r r z r r z r 3 r z r 2 1 2 1 z 21 z uz F xF yF x y z 3 2E r 3 r r r z r uy 1 2E r u x2 u y2 u z2 Выпор Рабочий орган Зона уплотнения АНАЛИТИЧЕСКИЕ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ МОДЕЛИ В ГРУНТЕ mz Q N sin FТр cos mz N S FТр N a m VУд Пр S max S z2 dz 2 A z3 2 B z 2 C dt 3 9230 2 z A z 2 B A (tg 2 tg ) tg 19 0,47 tg19 14518,39 m 0,56 B g 9,81 2 C VУд 0,44 2 1,6 1,4 1,6 см (теор) 1,2 4,1 см (теор) 5,0 см (теор) 1,0 Скорость, м/с Расчётная схема сил, действующих на модель tg cos 7,3 см (теор) 10,0 см (теор) 0,8 0,6 0,4 0,2 0,0 0 10 20 30 40 50 Время, мс 60 70 80 90 100 АНАЛИТИЧЕСКИЕ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ МОДЕЛИ В ГРУНТЕ m M пр z m M пр z Q N sin FТр cos M пр kпр гр tg 2 z 3 3 FТр N N N упр Nпл N упр k u, Nпл u M 3 2 1 kпр z z 2 z 0 z g m Расчётная схема сил, действующих на модель 1 tg 2 m 2 k 1 tg 0 m к к н ek з z к 1 1 н ek з z к k z M 3 2 1 k пр z z 2 к 1 1 н e з z 0 z g m к 2 46,08 V 41,38 kпр Vуд 16,96 Vуд уд 2 н 0,05 1 с 2 к 250 1 с k g m zпогр 1 tg k з 1,3 АНАЛИТИЧЕСКИЕ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ МОДЕЛИ В ГРУНТЕ 1,2 0,06 1 0,05 V (теор) 0,04 Глубина, м Скорость, м/с 0,8 V (эксп) 0,6 0,4 z (теор) 0,03 z (эксп) 0,02 0,2 0,01 0 0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1 0 а) -0,2 Время, с 0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 б) 0,09 Время, с 0,1 Изменение скорости движения модели в грунте (а) и глубины её погружения (б). Масса модели m=0,56 кг, высота падения h=0,05 м а) 1,4 1,4 1,2 1,2 1,0 1,0 0,8 0,6 0,4 V (эксп) б) 1,6 Скорость, м/с Скорость, м/с 1,6 0,8 0,6 V (эксп) 0,4 V (теор) V (теор) 0,2 0,0 0,00 0,2 0,01 0,02 -0,2 0,03 0,04 0,0 0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 -0,2 Время, с Время, с Изменение скорости движения в грунте модели различной массы:(а) - m=0,27 кг; (б) - m=0,47 кг 0,08 АНАЛИТИЧЕСКИЕ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ МОДЕЛИ В ГРУНТЕ 0,9 1,10 а) 0,8 б) 1,00 0,90 0,7 0,80 0,6 0,70 Скорость, м/с Скорость, м/с 0,5 0,4 0,3 0,50 0,40 V (эксп) 0,30 V (эксп) 0,2 0,60 V (теор) V (теор) 0,20 Полиномиальный -V (эксп) Полиномиальный (V (эксп) ) 0,1 0,10 0,0 0,00 0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10 0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 0,05 0,055 0,06 0,065 0,07 0,075 0,08 0,085 -0,10 -0,1 Время, с Время, с 1,50 в) г) 1,50 1,30 1,30 1,10 1,10 Скорость, м/с Скорость, м/с 0,90 0,70 0,50 V (эксп) 0,90 0,70 0,50 V (эксп) V (теор) V (теор) Полиномиальный (V (эксп) ) 0,30 0,30 0,10 -0,10 Полиномиальный (V (эксп) ) 0,10 0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 Время, с 0,05 0,055 0,06 0,065 0,07 0,075 0,08 0,085 -0,10 0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 0,05 0,055 0,06 Время, с Изменение скорости модели массой 0,56 кг в грунте для различной высоты падения: (а) – 0,016м; (б) – 0,041м; (в) – 0,073м; (г) – 0,100м 0,065 0,07 0,075