Моделирование электрических машин MathCAD, MatLAB/Simulink
реклама

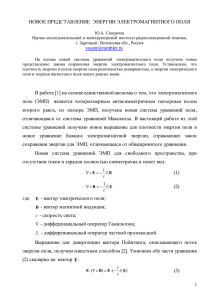
Моделирование электрических машин MathCAD, MatLAB/Simulink Общие положения Электрические машины как постоянного тока, так и переменного тока – это электромеханические преобразователи энергии (ЭМП), принцип действия которых базируется на электромагнитном взаимодействии, электрического тока и магнитного поля (закон электромагнитной индукции и закон Ампера) и втором законе Ньютона (законе равновесия моментов и сил). Конструктивное исполнение ЭМП Общим характерным конструктивным признаком электромеханических преобразователей энергии является наличие подвижной (в большинстве случаев вращающейся) и неподвижной частей, в пазах которых располагаются обмотки. Геометрическая (конструктивная) модель магнитопровода ЭМП имеет следующий вид: A C B Математическое описание процессов ЭМП При описание процессов в ЭМП оперируют с переменными состояния, представленными в векторноматричной форме, в виде векторовстолбцов мгновенных значений напряжений источников питания, токов и потокосцеплений обмоток подвижной и неподвижной частей. usA U s usB Ea usC ura U r urb Ea urc isA I s isB Ea isC ira I r irb Ea irc sA s sB Ea sC ra r rb Ea rc 1 0 0 Ea 0 a 0 2 0 0 a 2 a, a где - единичные вектора, учитывающие пространственное смещение обмоток. Для трехфазной (естественной) системы координат а 1 3 a j 2 2 1 3 a j 2 2 2 Параметры ЭМП Параметрами ЭМП являются активные сопротивления, эквивалентные индуктивности, индуктивности рассеяния и индуктивности взаимоиндукции обмоток подвижной и неподвижной частей. Параметры электромеханических преобразователей энергии могут быть найдены в справочной литературе или определяются по методикам расчета. Взаимные индуктивности между фазами обмоток подвижных и неподвижных частей ЭМП являются периодическими функциями от угла поворота (пространственного смещения) частей относительно друг друга. Поэтому полная система дифференциальных уравнений, описывающая процессы в электромеханических преобразователях энергии, нелинейная. Координатные системы При математическом описании процессов в ЭМП и разработке их структурных схем осуществляют замену действительных переменных новыми переменными при условии сохранения адекватности математического описания физическому объекту. Для этого переходят от естественной системы координат к эквивалентной прямоугольной системе координат и все вектора токов, напряжений и потокосцеплений записывают в новой системе координат. В настоящее время на практике наиболее часто используется математическое описание и структурные схемы ( в частности для асинхронного двигателя) в следующих системах координат: неподвижная система координат, связанная со статором ,k 0 а именно: , , вращающаяся синхронно с магнитным полем ,k c а именно: x, y, вращающаяся система координат d,q, скорость вращения которой k r При этом составляющие проекций векторов напряжений источников питания на оси , записывают в виде тригонометрических функций: U U m cos(t ), U U m sin(t ), Для других координатных осей проекции этих векторов на оси равны 1 Разработка моделей в MathCAD и MatLAB На первом этапе при разработке моделей необходимо математическое описание процессов в исследуемом объекте ( данном случае в асинхронном короткозамкнутом электродвигателе). В векторной форме система уравнений, описывающая процессы в двигателе имеет следующий вид: Система уравнений равновесия напряжений d s us Rsis jk s dt d r ur Rr ir j k r dt s Ls is Lmir r Lmis Lr ir Электромагнитный момент и уравнения равновесия моментов Уравнения равновесия напряжений дополняют выражением момента, представленного как векторное произведение потокосцепления и тока M k ( i ) и уравнением равновесия моментов d J M M c dt Второй этап в разработке модели Представление полученных уравнений виде проекций векторов на оси выбранной для исследования системы координатных осей. Преобразование уравнений к виду удобному для решения, к форме уравнений Коши. После этого этапа моделирование в программах MathCAD и MatLAB имеют свои особенности. Решение уравнений в MathCAD Решение уравнений в MathCAD реализуется с помощью численных методов Эйлера, Рунге-Кутта и т. д.с разработкой пользовательских программ и с использованием встроенных функций Odesolve, Rkadapt, rkfixed и т. д. Пример программы в MathCAD d U sx i sx Rs sx c sy ; dt d U sy i sy Rs sy c sx ; dt d 0 irx Rr rx (c ) ry ; dt d 0 iry Rr ry (c ) rx ; dt 3 M p n ( sx i sy sy i sx ); 2 d J M M c. dt Начальные условия sx 0 0 sy 0 0 0 rx 0 : , t 0 : 0, dt : 0.01, j : 0...1000 ry 0 0 0 0 M 0 0 t j dt sx j dtU sx s sx j K r s rx j c sy j t j 1 dt K sy s sy r s ry c sx sx j 1 j j j j sy j 1 rx dt r rx K s r sx (c j ) ry j j j j rx j 1 : dt K ( ) ry j r ry j s r sy j c j rx j ry j 1 pn Kr j 1 j dt 1.5 p n rx j sy sx j ry M c j j M j 1 J L s Kr 1.5 p n rx j sy j sx j rx j Ls 0.975 0.8 0.6 Mj wj 0.4 0.2 0 3.665 10 3 0.2 0 0 20 40 60 80 tj 100 120 140 145 Имитационная модель в MatLAB При моделировании электромеханического преобразователя необходимо создать: •модель источника электроэнергии; •модель ЭМП (двигателя); •модель механизма, который приводится в действие двигателем; •модель системы управления координатами двигателя. Модель электрической сети Модель трехфазной электрической сети (источника электроэнергии) можно собрать следующим образом (используя группу SimPowerSystems/Electrical Sources, компонент AC Voltage Source): •В созданной модели необходимо назначить для каждого компонента напряжение 310 Вольт (амплитудное значение фазного напряжения) и частоту 50 Гц. Сдвиг по фазам – 0, 240, 120 градусов для каждого компонента соответственно. •Для того, чтобы модель с примененными компонентами заработала, необходимо (в обязательном порядке!) установить компонент измерения напряжения Voltage Measurement из группы SimPowerSystems/ Measurements Модель двигателя В качестве модели двигателя воспользуемся компонентом Asynchronous Machine SI Units, находящийся в подгруппе SimPowerSystems/Machines. В свойствах компонента необходимо установить тип ротора как короткозамкнутый (Rotor type - Squirrel Cage). Параметры схемы замещения, предлагаемые для редактирования, в рамках данной задачи моделирования изменению не подлежат. •Модель двигателя выдает вектор значений рассчитанных координат. Для визуализации конкретных координат модели двигателя необходимо применить блок Machines Measurement Demux из подгруппы SimPowerSystems/Machines. • В свойствах компонента необходимо выбрать подключение к асинхронному двигателю, а также установить «галочки» напротив тех координат, которые подлежат визуализации: ток статора, электромагнитный момент, скорость ротора. К компоненту Machines Measurement Demux становится возможным подключать стандартные компоненты визуализации, например Scope. Полная модель двигателя и электрической сети, а также результаты моделирования процесса включения двигателя, представлены на рис.1. Перед началом моделирования необходимо задать время моделирования 0,35 секунд, а также установить метод расчета ode23tb через меню окна редактирования Simulation\Configuration Parameters, строка Solver. Рис.1 Структурная модель АД При разработке структурной модели асинхронного короткозамкнутого двигатель исходную систему уравнений представляют в форме уравнений Коши относительно необходимых для исследования переменных и системы координат. 2 i disx Lm Rr r ( Rr L R L )isx L u Lm Rr sy ωr isy ; dt Lr L Lr r 2 m disy dt 2 s r 2 r sx Lm Lrr r ( Rr L2m Rs L2r )isy L2r usy Lr L d r Rr Lm Rr isx r ; dt Lr Lr 3 Lm M p r isy ; 2 Lr J d r M Mc, z p dt Rr Lm isxisy - ωr isx ; Lr r где проекции вектора напряжения при необходимо записать в виде usx U s sin ; usy U s sin , ct t – угол отставания где вектора потокосцепления ротора от поля статора, U s – амплитуда напряжения обмотки статора. Данную модель можно реализовать, приведя систему уравнений к операторной форме записи в осях Тогда можно представить структурную схему асинхронного двигателя во вращающейся системе координат, ориентированной по результирующему вектору потокосцепления ротора в следующем виде рис. 2 d,q Rr Lm usd Rэ (Tэ p 1) isd 2 rd k Lsisq ; Lr Lm usq Rэ (Tэ p 1) isq k Lsisd z p rd ; Lr 0 (T2 p 1) rd Lmisd ; Lm Rr isq k z p ; Lr rd 3 Lm M z p rd isq ; 2 Lr 1 ( M M c ). Jp