ЛР_05_методы и устр_опр_простр_пол
реклама

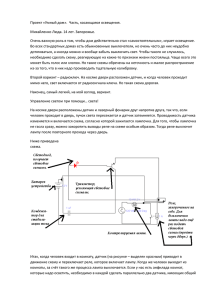
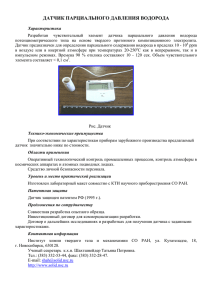
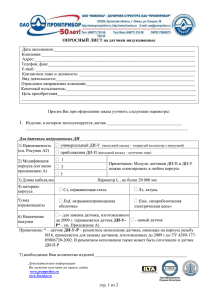
Дисциплина «Основы ТАУ» Группа ТТ-07-3 28 сентября 2009 года Лабораторная работа № 4 Методы и устройства для получения информации о пространственном положении • Методы определения положения • Принципиальные схемы устройств • Стенд для регулировки топливной аппаратуры дизеля Цель работы: изучить принципиальные электрические схемы управления технологическим оборудование для ТО и ТР автомобилей 1. Пространственный объект: - неподвижный или движущийся простой или сложный объект, явление, событие, процесс и ситуация. 2. Происхождение (пространственных данных): Сведения об источниках пространственных данных и описание их жизненного цикла, используемые для косвенной оценки пространственных данных. В системах автоматического контроля и регулирования в процессе измерения физическая величина сравнивается с образцовой мерой. Приборы и схемы, выполняющие эту функцию, представляют группу элементов сравнения. К ним относятся автоматические компенсаторы, уравновешенные мосты и устройства с дифференциально-трансформаторными схемами Задание 1 Дать краткое описание работы электрического моста и предложить технологический процесс, в котором можно эту схему применить Задание 2 Самостоятельно опишите принцип действия данной схемы Задание 3: Какой критерий положен в основу определения техсостояния подвески автомобиля? Задание 4: Что необходимо контролировать при проверке фар автомобиля? Задание 6: Описать работу схемы автоматизации шлифовальных работ Задание 7: Какую роль в схеме управления играют ЭМР К1 и К2? Что обеспечивает катушка индуктивности L? Задание 8: К чему приводит срабатывание ЭМР К1, К2, К3, К4? Задание 10: Укажите на схеме средства автоматики и опишите их работу Задание 9: Какие параметры ТНВД требуют автоматизации контроля? 1.В отчет внести схему размещения датчиков на двигателе. 2.Выделить на схеме все ниже указанные датчики систем двигателя 3.Отметить какой датчик определяет перемещение деталей или объекта контроля (регулирования), характер перемещений Датчик детонации ДД устанавливается в верхней части блока цилиндров и воспринимает аномальные вибрации (детонационные удары) в двигателе. Чувствительным элементом датчика является пьезокристаллическая пластинка, наклеенная на эластичную мембрану. Параметры мембраны подбираются так, что частота ее собственных колебаний совпадает с частотой колебаний при резонансе. При детонации на выходе датчика генерируются импульсы напряжения, амплитуда которых увеличивается с возрастанием интенсивности детонационных ударов. Выходными сигналами датчика детонации являются амплитуда напряжения импульса, пропорциональная силе удара Р, и частота следования импульсов S. Блок управления по сигналам датчика регулирует опережение зажигания для устранения детонационных вспышек топлива. Датчик скорости автомобиля Дс.а устанавливается на коробке передач на приводе спидометра. Линейная скорость автомобиля обеспечивается скоростью вращения раздаточного вала коробки передач. Поэтому скорость определяется по частоте вращения вала. Принцип действия датчика частоты вращения основан на эффекте Холла. Датчик осуществляет преобразование вращения коленчатого вала двигателя и выдает на блок управления прямоугольные импульсы напряжения с частотой, пропорциональной скорости вращения ведущих колес. Датчик массового расхода воздуха Дм.р.в. устанавливается между воздушным фильтром и шлангом, идущим к дроссельному патрубку. В датчике используются три чувствительных элемента в виде струн. Один элемент определяет температуру воздуха, а два других, соединенных параллельно, нагреваются до определенной температуры, превышающей температуру воздуха. Проходящий через датчик воздух охлаждает нагреваемые элементы. Расход воздуха функционально связан с электрической мощностью, необходимой для поддержания заданной температуры нагреваемых элементов. Информацию о расходе воздуха датчик выдает в виде частотного сигнала. Чем больше расход воздуха, тем выше частота сигнала. Блок управления использует информацию от датчика массового расхода воздуха для определения длительности импульса открытия форсунок. Датчики частоты вращения (ДЧВ) и углового положения коленчатого вала (ДУП) являются индукционными и имеют общий ротор с зубьями. Датчик ДЧВ генерирует электрические импульсы напряжения при прохождении в его магнитном поле зубьев диск ротора, частота следования которых пропорциональна частоте вращения коленчатого вала nкв. У диска ротора имеется 58 зубьев с шагом 6°. При таком шаге на диске помещается 60 зубьев, но два зуба срезаны .для создания импульса синхронизации, который необходим для согласования работы контроллера с ВМТ поршней в первом и четвертом цилиндрах. Блок управления по сигналам датчиков ДЧВ и ДУП определяет частоту вращения коленчатого вала и выдает импульсы управления на форсунки.