З Д Р А В С Т В У Й...
реклама

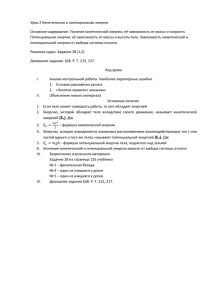
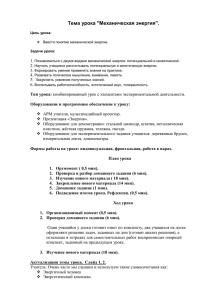
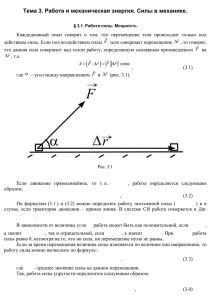
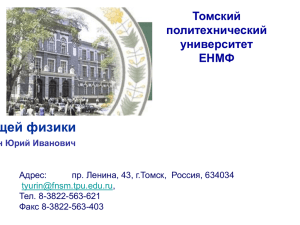
З Д Р А В С Т В У Й Т Е! Лекция 7. ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ 7.1. Потенциальная энергия. 7.2. Закон сохранения энергии. 7.3. Потенциальные кривые и условия равновесия механических систем. 7.1. ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ Потенциальная энергия – механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними. Если частица в каждой точке пространства подвержена воздействию других тел, то говорят, что эта частица находится в поле сил. Так, например, частица у поверхности Земли находится в поле сил тяжести – в каждой точке пространства на нее действует сила P mg . В качестве второго примера, рассмотрим заряженную частицу е, находящуюся в электрическом поле, возбуждаемом неподвижным точечным зарядом q. Это поле характерно тем, что направление силы, действующей на частицу в любой точке пространства, проходит через неподвижный центр (заряд q), а величина силы зависит только от расстояния до этого центра: F=F(r). Поле сил, обладающее такими свойствами, называется ЦЕНТРАЛЬНЫМ. Если во всех точках поля силы, действующие на частицу, одинаковы по величине и направлению F const , поле называется однородным. Поле, изменяющееся со временем, называется нестационарным. Поле, остающееся постоянным во времени, называется стационарным. Для стационарного поля может оказаться, что работа, совершаемая над частицей силами поля, зависит лишь от начального и конечного положения частицы и не зависит от пути, по которому двигалась частица. Силы, обладающие такими свойствами, называются консервативными. Рис. 7.1 Из независимости работы консервативных сил от пути вытекает, что работа таких сил на замкнутом пути, равна нулю. Чтобы доказать это, разобьем произвольный замкнутый путь на две части: путь I, по которому частица переходит из точки 1 в точку 2, и путь II, по которому тело переходит из точки 2 в точку 1, причем точки 1 и 2 выберем произвольно. Работа на всем замкнутом пути равна сумме работ, совершаемых на каждом из участков: A A12 II A21 I (7.1) Легко сообразить, что работы (А21)II и (А12)I отличаются только знаком. Действительно, если направление силы не меняется, а направление перемещения изменить на противоположное, то работа, согласно определению, изменит знак. Таким образом, равенство (7.1) можно записать в виде A A12 II A21 I , и поскольку работа не зависит от пути, т.е., A A , мы приходим к 12 II 21 I выводу, что А=0. Из равенства нулю работы на замкнутом пути легко получить, что работа А12 не зависит от пути. Это можно сделать, обратив ход проведенных выше рассуждений. Таким образом, консервативные силы можно определить двумя способами: 1) Как силы, работа которых не зависит от пути, по которому частица переходит из одного положения в другое. 2) Как силы, работа которых на любом замкнутом пути равна нулю. 7.1.1. РАБОТА УПРУГОЙ СИЛЫ Рис. 7.2 Вначале вычислим работу внешней силы, растягивающей пружину. По III закону Ньютона внешняя сила равна по модулю силе упругости, но имеет противоположное направление Fвнешн. F упр. Учитывая выражение для упругой силы жесткость), получим: Fвнешн . kx Fупр. kx (k - (7.2) График этой силы изображен на рис.7.2. Работа внешней силы на участке пути численно равна площади заштрихованной трапеции: F1 F2 kx1 kx2 kx2 2 kx12 x2 x1 Aвнешн. l 2 2 2 2 (7.3) Работа другой силы на том же участке отличается только знаком, следовательно, kx12 kx2 2 Aупр. 2 2 (7.4) Естественно, что этот же результат можно получить интегрированием: x2 x2 1 1 kx12 kx2 2 Aупр. Fупр.dx kxdx 2 2 x x При x1 x2 , т.е. при растяжении пружины, упругая сила совершает отрицательную работу, что соответствует правилу о знаке силы: силы притяжения считаются отрицательными, силы отталкивания – положительными. Действительно, при увеличении расстояния между притягивающимися телами сила притяжения составляет тупой угол с направлением перемещения / 2 , а косинус такого тупого угла является отрицательным числом. Здесь сила притяжения совершает отрицательную работу (рис.7.2,а). Сила же отталкивания составляет острый угол с направлением перемещения 0 / 2 ; она совершает положительную работу (рис.7.2,b). силы упругости консервативными силами. Итак, являются 7.1.2. РАБОТА gh1 h2 Рис. 7.3 ГРАВИТАЦИОННОЙ СИЛЫ Докажем, что сила тяжести является консервативной. Эта сила в любой точке имеет одинаковую величину и одинаковое направление – вниз по вертикали (рис.7.3). Поэтому, независимо от того, по какому из путей (I или II) движется частица, работа А12, согласно (6.4) определяется выражением A12 mg l12 mg (l12 ) пр.g Из рисунка 7.3 видно, что проекция вектора l12 на направление равна разности высот следовательно выражение для работы можно записать в виде: (7.5) A12 mg(h1 h2 ) Последнее выражение очевидно не зависит от пути; отсюда следует, что сила тяжести консервативна. Естественно, что этот же результат можно получить интегрированием: x2 Aгравит Fгравит dr x1 x2 x1 mM r2 dr mM r1 mM (7.6) r2 Если r1 =R (радиус Земли), r2=R+h, m – масса тела, M – масса Земли, то mM mM mMh A R Rh R( R h ) Работа внешней силы имеет противоположный знак. mMh A Следовательно, Если высота h<R, то можно R( R h ) приближенно получить R+h≈R. Т.к. mg mM ,то g M R R A=mgh, где h=h1-h2. 7.1.3. РАБОТА КУЛОНОВСКОЙ СИЛЫ (САМОСТОЯТЕЛЬНО!!!) 2 и тогда Отметим, что поле консервативных сил является частным случаем потенциального силового поля. Поле сил называется потенциальным, если его можно описать с помощью функции U(x,y,z,t), градиент которой определяет силу в каждой точке поля: F U .Функция U называется потенциальной функцией или потенциалом. В случае, когда потенциал явно не зависит от времени, т.е. U=U(x,y,z), потенциальное поле оказывается стационарным, а его силы консервативными. В этом случае U x, y, z x, y, z , где П(x,y,z,t) – потенциальная энергия частицы. Для нестационарного силового поля, описываемого потенциалом U(x,y,z,t), отождествлять потенциальные и консервативные силы нельзя. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии: dA d (7.8) Работа dA выражается как скалярное произведение силы dr и выражение (7.8) можно F на перемещение записать в виде: Fdr d (7.9) Потенциальная энергия может быть определена исходя из (7.9) как Fdr C , где С – постоянная интегрирования, т.е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Однако это обстоятельство не имеет никакого значения, так как во все физические соотношения входит либо разность значений П в двух положениях тела, либо производная функции П по координатам. Поэтому потенциальную энергию тела в каком-либо положении принимают равной нулю (выбирают нулевой уровень отсчета), а энергию в других положениях отсчитывают относительно этого уровня. Следовательно, если известна функция П(r), то из формулы (7.9) можно найти силу по модулю и направлению. Рассмотрим перемещение частицы параллельно оси х по dx. Такое перемещение сопровождается совершением над частицей работы, равной dA Fds Fx dx (компоненты перемещения dy и dz равны нулю). Согласно (7.8) та же работа может быть представлена как убыль потенциальной энергии: dA=-dП. Приравняв оба выражения для работы, получим, что Fx dx dП откуда Fx d / dx (y=const, z=const). Выражение, стоящее справа, представляет собой производную функции П(x,y,z), вычисленную в предположении, что переменные y и z остаются неизменными, а изменяется лишь переменная х. Подобные производные называются частными и обозначаются в отличии от производных функций одной переменной, символом дП / дх . Следовательно, компонента силы по оси х равна взятой с обратным знаком частной производной потенциальной энергии по переменной х: Fx д / дх . Для компонент силы по осям y и z получаются аналогичные выражения, таким образом: Fx дΠ / дх; Fy дΠ / дy; Fz дΠ / дz (7.10) Зная компоненты, можно найти вектор силы: F gradΠ П П П grad П i j k x y z где - i , j, k , , (7.11) (7.12) единичные векторы координатных осей. Вектор, определяемый выражением (7.11) называется ГРАДИЕНТОМ СКАЛЯРА П. Для него наряду с обозначением grad П применяется также обозначение П («набла») обозначает символический вектор, называемый оператором Гамильтона или набла-оператором: дΠ дΠ дΠ (7.13) i j k дх дy дz Итак, консервативная сила равна градиенту потенциальной энергии, взятому с обратным знаком (7.11). Из равенства (7.11) следует, что вектор градиента направлен против силы поля. А так как вектор силы указывает направление убывания потенциальной энергии (7.9), то градиент всегда направлен в сторону возрастания потенциальной энергии. Очевидно, что при перемещении по замкнутому контуру (см. Рис.7.4) начальное и конечное положение тела совпадают и работа при этом равна нулю: (7.14) ( Fd r ) 0 Линейный интеграл по замкнутому контуру, приведенный в левой части уравнения (7.14), называют циркуляцией вектора F. Тогда ЦИРКУЛЯЦИЯ вектора потенциальной силы по замкнутому контуру равна нулю. Для неконсервативных сил это условие не выполняется. Типичным представителем неконсервативных сил является сила трения. Работа этой силы по замкнутой траектории не равна нулю. Часть работы, совершаемой при трении, превращается в тепло и рассеивается. Такие силы называют диссипативными. Полная механическая энергия системы – энергия механического движения и взаимодействия Е=Т+П. 7.2. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ Рассмотрим систему материальных точек массами m1,m2,,...,mn, движущихся со скоростями υ 1 , υ 2 ,..., υ n. Пусть F1 , F2 ,..., Fn равнодействующие консервативных внутренних сил, действующих на каждую из точек, а F1 , F2 ,..., Fn равнодействующие внешних сил, которые также будем считать консервативными. Кроме того, будем считать, что на материальные точки действуют еще и внешние неконсервативные силы; равнодействующие этих сил, действующих на каждую материальную точку, f1 , f 2 ,..., f n . При V<<C массы материальных обозначим точек постоянные и уравнение второго закона Ньютона для этих точек следующие: dv1 m1 F1 F1 f1 dt dv 2 m2 F2 F2 f 2 dt dv n mn Fn Fn f n dt m1v1dv1 ( F1 F1 )dr1 f1dr1 m2 v 2 dv 2 ( F2 F2 )dr2 f 2 dr2 (I) mn v n dv n ( Fn Fn )drn f n rn (II) Двигаясь под действием сил, точки системы за интервал времени dt совершают перемещения, соответственно dr1 ,dr2 ,..., drn равные , умножим каждое из уравнений скалярно на соответствующее перемещение и, учитывая, что dri vi(II). dt , получим Сложив эти уравнения, получим: n n n (7.15) m ( V d V ) ( F F ) d r f d r i i i i i i i i i 1 i 1 i 1 Первый член равенства (7.15) , n mi ( Vi dVi ) n d ( miVi 2 / 2 ) dT i 1 i 1 где dT – приращение кинетической энергии. Второй член равен элементарной работе внутренних и внешних n ( Fi Fi )dri консервативных сил, взятой со знаком i 1 минус, т.е. равен элементарному приращению потенциальной энергии dП системы (Рис. 7.8). Правая часть равенства (7.15) задает работу внешних неконсервативных сил, действующих на систему, таким образом, имеем (7.16) d ( T П ) dA При переходе системы из состояния 1 в состояние 2 2 , т.е. изменение полной механической 1 d ( T П ) А12 энергии системы при переходе из одного состояния в другое, равно работе, совершенной при этом внешними неконсервативные силы отсутствуют, то из 7.16 следует, что d ( T П ) 0 , откуда Е=Т+П=const, (7.17) т.е. полная механическая энергия системы сохраняется. Выражение (7.17) представляет собой закон сохранения механической энергии: В системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется, т.е. не изменяется со временем. В консервативных системах полная механическая энергия остается постоянной. Могут лишь происходить превращения кинетической энергии в потенциальную и обратно в эквивалентных количествах так, что полная энергия остается неизменной. Этот закон не есть просто закон количественного сохранения энергии, а закон сохранения и превращения энергии, выражающий и качественную сторону взаимного превращения различных форм движения друг в друга. Закон сохранения и превращения энергии – фундаментальный закон природы, он справедлив как для систем макроскопических тел, так и для систем микротел. В системе, в которой действуют также неконсервативные силы, например силы трения, полная механическая энергия не сохраняется. Следовательно, в этих случаях закон сохранения механической энергии несправедлив. Однако при «исчезновении» механической энергии всегда возникает эквивалентное количество энергии другого вида. Таким образом, энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой. В этом и заключается физическая сущность закона сохранения и превращения энергии – сущность неуничтожимости материи и ее движения. 7.3. ПОТЕНЦИАЛЬНЫЕ КРИВЫЕ И УСЛОВИЕ РАВНОВЕСИЯ МЕХАНИЧЕСКИХ СИСТЕМ П П2 ΔП Δx П1 x x1 Рис.7.6 x2 Часто материальная точка может двигаться только по некоторой заданной кривой, например вдоль оси абсцисс. В этом случае ее потенциальная энергия зависит только от одной переменной, т.е. U f(x). График, изображающий зависимость потенциальной энергии от расстояния, называется потенциальной кривой. Оказывается, что анализ формулы этого графика дает очень много сведений о характере движения точки. В качестве примера рассмотрим движение частицы под действием упругой силы (рис. 7.5). При х=х0 пружина не деформирована и силы, действующие на частицу, равны нулю. При отклонении частицы от положения равновесия на нее действует сила F k( x x0 ) . Заметим, что при х>x0 сила отрицательна (притяжение), а при х<х0 – положительна (отталкивание). П Е Е Т П x1 x0 x x2 x Рис.7.5 Она изображена на рис. 7.5 в виде параболы с вершиной в точке х=х0.. Механическая же энергия частицы F=Т+П является постоянной величиной и она изображается на графике прямой, параллельной оси абсцисс. Из графика, прежде всего, видно, что кинетическую энергию в любой точке можно найти сразу как длину отрезка от прямой ЕЕ до параболы, ибо Т=E-П. Максимальное значение кинетической энергии частица имеет при х=х0; здесь П=0, и Тмакс=Е. В точках же х=х1 и х=х2, кинетическая энергия частицы равна нулю, ибо здесь Пмакс=Е. Далее из графика видно, что частица не может сместиться правее точки х2 и левее точки х1. Действительно, кинетическая энергия не может быть отрицательной величиной, следовательно, потенциальная энергия не может быть больше полной. В этом случае говорят, что частица находится в потенциальной яме с координатами. Анализ наклона потенциальной кривой позволяет сразу же определить знак силы и тем самым – характер её действия (притяжения или отталкивания). В самом деле, элементарная работа А Fх ; с другой стороны, Fx . Следовательно, если сила – функция только одной координаты, например абсциссы х, то F П / х , или A П1 П2 П. Но на графике 7.6 U / x tg , где - угол наклона потенциальной кривой к оси абсцисс. Соответственно, точное значение силы получается лишь в пределе, когда перемещение Δх стремится к П dП нулю: (7.19) / Fx lim x 0 х dx П ( x ) Итак, в консервативных системах сила равна производной от потенциальной энергии по координате, взятой с противоположным знаком. В случае, когда потенциальная энергия возрастает, потенциальная кривая образует с осью абсцисс острый угол. Тангенс острого угла – положительное число, а сила имеет противоположный знак, т.е. отрицательный; следовательно, она является силой притяжения. Если же потенциальная энергия убывает, то потенциальная кривая образует с осью абсцисс тупой угол, тангенс которого является отрицательным числом. В этом случае сила положительна, т.е. является силой отталкивания. Наконец, в точках минимума или максимума энергии, сила, очевидно, равна нулю, ибо в окрестностях этих точек она меняет знак. На границах касательная к потенциальной кривой в этих точках параллельна оси абсцисс. В соответствии с (7.19) в точках М и N сила равна нулю, dП следовательно dx 0 условие равновесия. Зная вид функции, которой выражается потенциальная энергия, можно сделать ряд П N Е=Т+П Т П М x x1 xm x2 xn x3 Рис.7.7 Поясним это, воспользовавшись графиком на рис.7.7. Если полная энергия имеет значение, указанное на рис.7.7., то частица может совершать движение либо в пределе от х1 до х2, либо в пределах от х3 до бесконечности. В области х<х1 и x 2 x x 3 частица проникнуть не может, так как потенциальная энергия не может стать больше полной энергии (если бы это случилось, то кинетическая энергия стала бы отрицательной). Таким образом, область x 2 x x3 представляет собой потенциальный барьер, через который классическая частица не может проникнуть, имея должный запас полной энергии. Область x 2 x x3 называется потенциальной ямой. Если частица при своем движении не может удаляться на бесконечность, движение называется финитным. Если же частица может уходить сколь угодно далеко, движение называется инфинитным. Частица в потенциальной яме совершает финитное движение. Финитным будет также движение частицы с отрицательной полной энергией в центральном поле сил притяжения (предполагается, что потенциальная энергия обращается в нуль на бесконечности). Точка М – точка устойчивого равновесия. Условием устойчивого равновесия является d минимальное значение потенциальной энергии dx 0 . Точка N – точка неустойчивого равновесия. Условием неустойчивого равновесия является минимальное значение потенциальной энергии d 0 dx . 2 2 2 2 ЛЕКЦИЯ ОКОНЧЕНА УРА! УРА! УРА! ДО СВИДАНИЯ!