На правах рукописи Копотев Дмитрий Алексеевич РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ КОМБИНИРОВАННОЙ
реклама

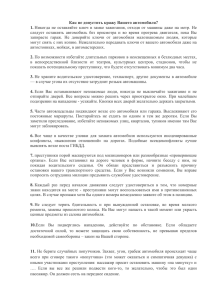
На правах рукописи Копотев Дмитрий Алексеевич РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ КОМБИНИРОВАННОЙ ЭНЕРГОСИЛОВОЙ УСТАНОВКИ ПАРАЛЛЕЛЬНОЙ КОМПОНОВОЧНОЙ СХЕМЫ ТЕПЛОВОГО И ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЕЙ ЛЕГКОВОГО АВТОМОБИЛЯ Специальность 05. 05. 03 – «Колесные и гусеничные машины» АВТОРЕФЕРАТ диссертации на соискание учёной степени кандидата технических наук Ижевск – 2011 Работа выполнена в ГОУ ВПО «Ижевский государственный технический университет» (ИжГТУ) Научный руководитель: доктор технических наук, профессор Филькин Николай Михайлович Официальные оппоненты: доктор технических наук, профессор Бендерский Борис Яковлевич кандидат технических наук Громовой Сергей Владимирович Ведущая организация: ГОУ ВПО Московский государственный технический университет «МАМИ» Защита состоится 5 мая 2011 года в 1400 часов на заседании диссертационного совета Д 212.065.03 при Ижевском государственном техническом университете по адресу: 426069, г. Ижевск, ул. Студенческая, д. 7. С диссертацией можно ознакомиться в библиотеке Ижевского государственного технического университета. Отзыв на автореферат в двух экземплярах, заверенных гербовой печатью, просим направить на имя учёного секретаря диссертационного совета. Автореферат разослан 29 марта 2011 г. Ученый секретарь диссертационного совета, доктор технических наук, профессор 2 Ю.В. Турыгин ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность работы. Одним из эффективных направлений повышения топливной экономичности и уменьшение выбросов токсичных веществ с отработавшими газами двигателей внутреннего сгорания (ДВС), является разработка и применение в конструкциях транспортных машин комбинированных энергосиловых установок (КЭСУ), которые часто называют гибридными энергосиловыми установками. КЭСУ представляют собой комбинацию двух типов двигателей, обычно ДВС и электродвигателя (ЭД), необходимые режимы работы которых, обеспечиваются системой управления. Система управления является одной из основных частей КЭСУ, от функционирования которой, во многом зависит эффективность работы КЭСУ. Трудоемкость создания КЭСУ значительно зависит от работ, связанных с системой управления. Эти работы направлены на поиск наиболее рациональных принципов, способов, алгоритмов, схем управления КЭСУ и т.д., позволяющих уменьшить расход топлива, улучшить экологическую безопасность и тягово-скоростные свойства автомобиля с КЭСУ. Практически все автомобильные фирмы мира, в настоящее время проводят исследования, направленные на создание КЭСУ. С течением времени объем исследований по данному направлению возрастает, что еще раз подтверждает эффективность, значимость и перспективность выполняемой научной работы. Цель работы. Разработка алгоритма и системы управления работой комбинированной энергосиловой установки параллельной компоновочной схемы теплового и электрического двигателей легкового автомобиля с приводом на задние колеса. Задачи исследования. Сформулированная цель и проведенный анализ нерешенных проблем по теме диссертации позволили определить следующие основные задачи исследования: 1. Критический анализ конструктивных схем и систем управления КЭСУ. 2. Разработка принципов и алгоритма управления работой автомобиля с КЭСУ. 3. Расчетные исследования по выбору и обоснованию алгоритма управления КЭСУ. 4. Разработка методики расчета параметров и характеристик тяговоскоростных свойств и топливной экономичности для обоснования системы управления КЭСУ. 5. Разработка системы управления работой автомобиля с КЭСУ. 6. Проведение экспериментальных исследований и лабораторнодорожных испытаний системы управления КЭСУ в составе автомобиля. 7. Разработка научно-обоснованных рекомендаций по совершенствованию системы управления КЭСУ. Методы исследования. Решения поставленных задач базируются на методах теории автомобиля, теории автоматического управления, основных положениях электроники и электротехники, методах синтеза и оптимизации кон3 струкций транспортных машин, методах инженерного эксперимента и математического анализа. Достоверность и обоснованность. Достоверность принятых в диссертационной работе решений подтверждается согласованностью теоретических и расчетных результатов с результатами экспериментальных исследований, полученных в лабораторных и дорожных условиях. Научная новизна заключается в следующем: - разработан алгоритм управления КЭСУ параллельной компоновочной схемы, который отличается от существующих использованием зависимости нагрузки теплового двигателя от равномерной скорости движения автомобиля; - разработана методика обоснования численных значений параметров системы управления, базирующаяся на показателях эксплуатационных свойств автомобиля; - впервые в России разработана система управления КЭСУ параллельной компоновочной схемы маломощного теплового двигателя и электрического двигателя постоянного тока; - разработаны научно-обоснованные рекомендации по созданию и совершенствованию системы управления. Практическая ценность. Внедрение в практику проектирования созданных теоретических основ расчета и обоснования алгоритма управления КЭСУ позволяет, во-первых, существенно улучшить эксплуатационные свойства автомобиля, оборудованного КЭСУ параллельной компоновочной схемы, вовторых, существенно уменьшить сроки, затраты и объем доводочных испытаний. Реализация результатов. Разработанные алгоритм и система управления КЭСУ были использованы при разработке опытных образцов гибридных автомобилей в Ижевском государственном техническом университете. Результаты диссертационной работы используются в учебных программах по дисциплинам «Особенности тяговой динамики и топливной экономичности автомобилей с гибридными силовыми установками (ГСУ)», «Конструирование и расчет КЭСУ автомобиля». Результаты работы были использованы при выполнении аналитической ведомственной целевой программы "Развитие научного потенциала высшей школы (2006-2008 годы)", номер государственной регистрации НИР: ВНТИЦ, 01.2.006 06492. При выполнении аналитической ведомственной целевой программы "Развитие научного потенциала высшей школы (2009-2010 годы)", номер государственной регистрации НИР: ВНТИЦ, 01.2.00 901933. При выполнении мероприятия №1.2.2 «Проведение научных исследований научными группами под руководством кандидатов наук» федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы» / Государственный контракт № П1449 от 03 сентября 2009 года. Апробация работы. Результаты исследований доложены на Всероссийской научно-технической конференции "Проблемы и перспективы автомобилестроения в России" ОАО "Ижевский автомобильный завод" (г. Ижевск, 2007 г.); на 4-ой Всероссийской научно-технической конференции "Проблемы и дости4 жения автотранспортного комплекса" УГТУ-УПИ (г. Екатеринбург, 2008 г.); на Международной научно-технической конференции "Проблемы транспортных и технологических комплексов" НГТУ (г. Н. Новгород, 2008 г.); на Международной научно-технической конференции "Состояние и перспективы транспорта. Обеспечение безопасности дорожного движения" ПГТУ (г. Пермь, 2009 г.); на Международной научно-технической и образовательной конференции "Образование и наука производству" ГОУ ВПО "Камская государственная инженерноэкономическая академия" (г. Набережные Челны 2010 г.); на 8-ой Всероссийской научно-технической конференции "Проблемы и достижения автотранспортного комплекса" УГТУ-УПИ (г. Екатеринбург, 2010 г.). Публикации. По теме диссертации опубликовано 20 печатных работ, из них: 10 статей в различных изданиях, 3 статьи в изданиях входящих в перечень ВАК РФ, 6 научно-исследовательских отчета, монография. Автор диссертации принимал участие в VIII выставке-сессии инновационных проектов республиканского молодежного форума (диплом I степени за инновационный проект «Комбинированная энергосиловая установка для легкового автомобиля»), участвовал в VIII Международной специализированной выставке "Нефть. Газ. Химия-2009" и "Машиностроение. Металлургия. Металлообработка-2009" (диплом за инновационный проект «Комбинированная энергосиловая установка для легкового автомобиля»), участвовал в X выставке-сессии инновационных проектов II республиканского молодежного инновационного форума (диплом I степени за инновационный проект «Создание комбинированной энергосиловой установки для городского легкового автомобиля»). Структура и объем диссертации: Работа состоит из введения, четырех глав, основных результатов и выводов и списка литературы. Диссертационная работа изложена на 167 страницах машинописного текста, содержит 76 рисунков, 11 таблиц и список литературы из 119 наименований. СОДЕРЖАНИЕ РАБОТЫ Во введении обоснована актуальность, сформулирована цель и задачи диссертационной работы. Приводятся сведения о новизне, практической значимости работы и апробации полученных результатов. В первой главе диссертационной работы проведен анализ воздействия автотранспортного комплекса России на окружающую среду. Рассмотрены вопросы нормирования выбросов вредных веществ автотранспортных средств в окружающую среду. Рассмотрены основные направления снижения количества выбросов вредных веществ и улучшения показателей топливной экономичности. Перспективным направлением, в настоящее время, является создание конструкций автомобилей, силовые установки которых работают на потреблении электрической энергии и углеводородного топлива – комбинированные (гибридные) энергосиловые установки. Проведен обзор и анализ автомобилей с КЭСУ созданных в мире, который показал, что практически все ведущие автомобильные фирмы мира в настоящее время разрабатывают, создают и реализовывают в различных объе5 мах транспортные средства с комбинированными (гибридными) энергосиловыми установками. Над созданием автомобилей с КЭСУ работает множество ученых. Данному направлению посвящены работы С.В. Бахмутова, Р.М. Галиева, К.Е. Карпухина, А.С. Кондрашкина, Г.О. Котиева, В.В. Селифонова, В.А. Умняшкина, Н.М. Филькина, А.А. Эйдинова и др. Снижение количества выбросов вредных веществ и улучшение топливной экономичности автомобиля с КЭСУ достигается за счет: применения ДВС меньшей мощности, чем в обычном автомобиле; работы ДВС в оптимальном режиме, это максимум КПД, минимум вреда экологии, работа на режимах минимального удельного расхода топлива (задача системы управления); уменьшения времени работы ДВС, его отключения на определенных режимах движения (задача системы управления). Автомобильные фирмы, при разработке и создании транспортных средств с КЭСУ, особое внимание уделяют разработке систем управления для КЭСУ. Система управления является важным составляющим элементом КЭСУ транспортного средства. Основным критерием выбора темы работы была практическая потребность автомобильных заводов в разрабатываемом научном направлении, позволяющим существенно повысить топливную экономичность, уменьшить выбросы токсичных веществ в окружающую среду, улучшить тягово-скоростные свойства выпускаемых легковых автомобилей. Интерес к подобным автомобилям проявляется со стороны гражданского населения, коммерческих и государственных организации, а также со стороны заказчиков оборонной техники. Во второй главе рассмотрена структура и конструктивные схемы комбинированной (гибридной) энергосиловой установки и выбраны основные элементы КЭСУ. Основные составляющие КЭСУ следующие: двигатель внутреннего сгорания, электрический двигатель, специальная гибридная трансмиссия, аккумуляторная батарея; силовая электроника или пускорегулирующая аппаратура и т.д. Силовая электроника или пускорегулирующая аппаратура используется для согласования работы ДВС и ЭД в различных режимах работы автомобиля с КЭСУ. Сюда входят различные контроллеры, микропроцессорные блоки управления, различные датчики, инверторы, конверторы, различные реле и т.д. Проведен анализ основных компоновочных схем последовательной, параллельной и смешанной, который показал, что наиболее распространенными конструкциями являются параллельное и смешанное соединение. На основании проведенных исследовании по выбору схемы энергосиловой установки, с учетом имеющихся возможностей, наиболее предпочтительной является гибридная энергосиловая установка, работающая по параллельной конструктивной схеме, которая может быть выполнена из разработанных и уже имеющихся в производстве крупных комплектующих. В данной схеме вращающий момент от ДВС и ЭД в зависимости от режимов и условий движения может передаваться к ведущим колесам как суммарно, так и раздельно. Вращающие моменты от ДВС и ЭД могут передаваться от одного двигателя к другому, это позволит ЭД работать в режиме генератора, заряжая источник электрической энергии, реализовать процесс рекуперации энергии и использовать 6 электродвигатель в качестве стартера. Согласование работы ДВС и ЭД гибридной энергосиловой установки при передаче вращающих моментов к ведущим колесам и друг другу по заданной программе и моделирование реальных условий движения транспортного средства осуществляется при помощи системы управления. В качестве теплового двигателя и электродвигателя было решено использовать ДВС ВАЗ-1111 и электродвигатель постоянного тока ПТ-125-12. В третьей главе предложены требования и принципы алгоритма управления работой КЭСУ, предложены системы управления электродвигателями постоянного тока, разработан алгоритм управления работой автомобиля с КЭСУ, разработана система управления легкового автомобиля с КЭСУ. Произведен расчет параметров и характеристик тягово-скоростных свойств и топливной экономичности для обоснования системы управления КЭСУ. Основные требования, предъявляемые к алгоритму управления: улучшение тягово-скоростных свойств автомобиля с КЭСУ, уменьшение выбросов отработавших газов автомобиля с КЭСУ, повышение топливной экономичности автомобиля с КЭСУ, баланс электроэнергии. В основу алгоритма управления должны быть положены следующие основные принципы: ЭД работает в качестве стартера при пуске ДВС; автомобиль движется на ЭД на малых скоростях; автомобиль движется на ДВС на квазиустановившихся режимах и при разгонах на высоких частотах вращения вала ДВС, при необходимости параллельно идет зарядка аккумуляторных батарей; разгон автомобиля на ДВС и ЭД; рекуперация энергии при торможении, замедлении и режимах принудительного холостого хода, ДВС не работает; на остановках и стоянках ДВС не работает. Эффективность работы КЭСУ напрямую зависит от разработанного алгоритма управления. Алгоритм управления должен обеспечивать определенные режимы работы автомобиля с КЭСУ (запуск, разгон автомобиля, регулирование скорости движения, торможение), необходимые водителю при управлении автомобилем, также алгоритм управления работой КЭСУ должен обеспечивать необходимое управление работой ЭД в составе КЭСУ (согласование работы ДВС и ЭД) в различных режимах движения автомобиля и т.д. В зависимости от необходимого режима работы автомобиля водитель управляет КЭСУ при помощи замка зажигания и педали акселератора. При пуске, управление ДВС осуществляется замком зажигания и педалью акселератора. На всех остальных режимах движения автомобиля управление ДВС осуществляется педалью акселератора, чем больше водитель нажимает на педаль акселератора, тем больше топливовоздушной смеси поступает в цилиндры ДВС, тем больше частота вращения коленчатого вала ДВС. При пуске, управление ЭД осуществляется замком зажигания. На всех остальных режимах движения автомобиля управление ЭД осуществляется педалью акселератора. Управление ЭД осуществляется путем подачи соответствующего напряжения и тока в обмотки ЭД, регулирования напряжения и тока в обмотках ЭД, для обеспечения необходимого режима работы ЭД (необходимой частоты вращения и необходимого вращающего момента ЭД). Математическое описание ЭД постоянного тока в статическом режиме: 7 Частота вращения n электродвигателя постоянного тока определяется: U Ia Ra U Ia Ra об/мин, n Ce Ô Ce Ô Ce Ô где U – напряжение источника питания постоянного тока, В; Iа – ток якоря, А; Rа – сопртивление цепи якоря, Ом; Ф – магнитный поток электродвигателя, Вб; Се – коэффициент, характеризующий магнитную систему или конструктивная постоянная электродвижущей силы. Вращающий момент M электродвигателя постоянного тока равен: M Ia CM Ô Н*м, где СМ – моментная конструктивная постоянная машины. Выразив из данного соотношения ток якоря и подставив полученное значение в формулу частоты вращения, получим следующее выражение: U M Ra n , (1) C e Ô Ce CM Ô Из формулы (1) видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя способами: изменением потока (тока) возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря. Математическую модель электродвигателя постоянного тока в динамическом режиме при регулировании напряжения питания или потока возбуждения можно представить в виде: d J dt M MH M I Ô C a M U R I N dÔ , Â Â B Â dt di U R a I a L a a C e Ô dt где Мн – момент нагрузки, Н*м; J - суммарный момент инерции якоря и нагрузки, кг*м2; dω/dt – первая производная угловой скорости или угловое ускорение; Nв – число витков обмотки возбуждения; Rв – активное сопротивление обмотки возбуждения, Ом; Iв – ток обмотки возбуждения, А; Uв – напряжение обмотки возбуждения, В; Lа – индуктивность якоря, Гн. Были проведены расчетные исследования, в результате которых были получены расчетные механические характеристики применяемого ЭД ПТ-125-12: зависимости напряжения питания Uэд и тока возбуждения Iэд для получения вращающего момента на выходном валу Ì ðàñ ýä от частоты вращения вала ЭД (рис. 1). На начальном этапе работы ЭД, когда его вращающий момент остается постоянным, необходимо осуществлять плавную регулировку (повышение) напряжения питания при постоянном токе возбуждения. Затем при постоянном максимальном напряжении питания необходимо уменьшать по определенному закону ток возбуждения, для получения нулевого момента при максимальной 8 частоте вращения вала ЭД равной 863,5 рад/с (8224 об/мин). Если в любой момент остановить на каком то уровне или не изменять по определенному закону ток возбуждения, то ЭД перейдет на частичную характеристику, при которой выходной момент будет уменьшаться быстрее и будет равен нулю при меньшей частоте вращения, чем 863,5 рад/с (8224 об/мин). Такие характеристики ЭД изображены штрих-пунктирными линиями на рис. 1. Рисунок 1 – Расчетное семейство нагрузочных характеристик ЭД ПТ-125-12 Нажимая на педаль акселератора, водитель желает получить нужную ему равномерную (постоянную) скорость движения автомобиля. Мощность сопротивления автомобилю с КЭСУ Nсопр, при движений с установившейся (равномерной) скоростью по горизонтальной дороге с асфальтобетонным покрытием равна: N ñîïð ( N f N w ) / ηòð , где Nf – мощность, необходимая для преодоления силы сопротивления качению при движении автомобиля с установившейся (равномерной) скоростью по горизонтальной дороге с асфальтобетонным покрытием, кВт; Nw – мощность, необходимая для преодоления силы сопротивления воздуха при движении автомобиля с установившейся (равномерной) скоростью, кВт; ηтр – коэффициент полезного действия трансмиссии ηтр = 0,79. N f fGV 1000 , где f – коэффициент сопротивления качению; G – полный вес автомобиля, Н. N w Fw К w V 3 1000 , где Fw – площадь проекции автомобиля на плоскость, перпендикулярную к его продольной оси (лобовая площадь автомобиля), м2; Кw – коэффициент сопротивления воздуха, зависящий от формы автомобиля, качества отделки его поверхности и атмосферных условий, кг/м3. Были проведены расчетные исследования, в результате которых были по9 лучены зависимости мощности сопротивления автомобилю с КЭСУ Nсопр или мощности ДВС, положения педали акселератора или нагрузки от установившейся (равномерной) скорости движения автомобиля по горизонтальной дороге с асфальтобетонным покрытием (рис. 2). Рисунок 2 - Зависимость нагрузки, мощности сопротивления движению автомобиля с КЭСУ от его равномерной скорости движения Обозначения на рис. 2 следующие: Н – нагрузка или положение педали акселератора, %; Nсопр – мощность сопротивления движению автомобиля с КЭСУ при его движений с установившейся (равномерной) скоростью по горизонтальной дороге с асфальтобетонным покрытием, кВт; V – равномерная скорость движения автомобиля, км/ч; 1 – расчетно-экспериментальная зависимость мощности сопротивления движению автомобиля с КЭСУ от его равномерной скорости движения; 2 – зависимость мощности сопротивления, которая учитывает возрастание с течением времени эксплуатации автомобиля с КЭСУ сопротивления движению и ухудшение рабочих характеристик ДВС (принимается ухудшение характеристик ДВС и возрастание потерь на 10 %); D – зона определяющая множество реальных характеристик между характеристиками 1 и 2, которые могут применяться для управления (отключения) ЭД; 3 – реальная характеристика, реализованная в разработанной системе управления КЭСУ, которая в зависимости от положения педали акселератора и скорости автомобиля обеспечивает необходимые водителю режимы работы автомобиля с КЭСУ. Расчетно-экспериментальная зависимость 1 на рис. 2 была получена из расчетной зависимости мощности сопротивления движению автомобиля от равномерной скорости после корректировки расчетного значения Nf на стенде с беговыми барабанами. Мощность сопротивления автомобилю с КЭСУ Nсопр равна мощности ДВС, при условии движения автомобиля с КЭСУ с установившейся (равномерной) скоростью. Рассмотрим частный случай (рис. 2), когда водитель нажимает на педаль акселератора, например, на 50 %. В этом случае ДВС и ЭД разгоняют автомо10 биль и при достижений скорости 77 км/ч, соответствующей заданному водителем положению педали акселератора (согласно кривой 3 на рис. 2), ЭД переходит в такой режим работы, при котором он не создает вращающего момента или переходит в генераторный режим для зарядки накопителя энергии. Автомобиль будет двигаться с равномерной скоростью за счет работы только ДВС, мощность ДВС при этом равна 11,5 кВт. Следовательно, зависимость мощности сопротивления движению автомобиля с КЭСУ от его равномерной скорости движения под номером 3 на рис. 2 характеризует переход ЭД из двигательного режима в генераторный и наоборот. Можно сделать следующий вывод, что для каждого выбранного положения педали акселератора соответствует определенная равномерная скорость движения автомобиля (рис. 2). Если скорость автомобиля будет ниже определенной для заданного положения педали акселератора, ЭД работает в тяговом режиме; если скорость автомобиля будет выше определенной для заданного положения педали акселератора, ЭД начинает работать в режиме генератора. Разработан следующий алгоритм управления работой КЭСУ автомобиля: 1. Запуск и холостой ход. ЭД через согласующий редуктор запускает ДВС. ДВС выходит на режим холостого хода (800-900 об/мин), а ЭД начинает работать в таком режиме, когда он не потребляет электрической энергии от накопителя и не создает вращающего момента на выходном валу, т.е. находится на границе перехода в генераторный или двигательный режимы работы. Если частота вращения коленчатого вала возрастет, ЭД перейдет в генераторный режим и начнет отдавать энергию в накопитель, тормозя ДВС. 2. Начало движения (трогание с места) и разгон. Нажимая на педаль акселератора, водитель желает получить нужную ему скорость движения автомобиля. Так как скорость автомобиля будет ниже для данного положения педали акселератора, то в этот период передается суммарный вращающий момент на ведущие колеса автомобиля от ДВС и ЭД для достижения нужной скорости. При этом ЭД питается только от накопителя электрической энергии. При скорости движения автомобиля, соответствующей заданному водителем положению педали акселератора или близкой к ней, определяемой мощностью ДВС и сопротивлением движению, ЭД переходит в такой режим работы, при котором он не создает вращающего момента или переходит в генераторный режим для зарядки накопителя энергии. 3. Условия, создающие дополнительную силу сопротивления движению. Движение на подъем, при встречном ветре или других условиях, создающих дополнительную силу сопротивления движению, когда скорость автомобиля будет ниже скорости необходимой водителю для этого положения педали акселератора ДВС и ЭД работают в тяговом режиме. 4. Условия, уменьшающие силы сопротивления качению. Движение на спуске, при попутном ветре или других условиях, уменьшающих силы сопротивления качению, когда скорость автомобиля будет выше определенной для заданного положения педали акселератора, ЭД начинает работать в режиме генератора. 5. Принудительный холостой ход. ЭД работает в режиме генератора при 11 снижении скорости автомобиля в момент, когда водитель не нажимает или уменьшает воздействие на педаль акселератора с включенным сцеплением, т.е. на режимах принудительного холостого хода (замедление-торможение). Так осуществляется процесс рекуперации электрической энергии. Система управления электромеханическим приводом, реализованная в электрической схеме (рис. 3), обеспечивает выполнение разработанного алгоритма, при этом моделируются реальные условия движения гибридного легкового автомобиля. В качестве определяющих параметров взяты: частота вращения выходного вала комбинированной энергетической установки, значение положения педали акселератора и скорость движения автомобиля. Рисунок 3 – Электрическая схема системы управления комбинированной энергосиловой установкой легкового автомобиля Основные обозначения на рис. 3 следующие: М – тяговый электрический двигатель ЭД с обмоткой возбуждения ОВ; АБ 1-АБ 8 – тяговые аккумуляторные батареи; БУ – блок управления возбуждением; ЛБ – логический блок, управляющий режимами работы ЭД; ДО – датчик частоты вращения ротора ЭД; ДД – датчик положения дроссельной заслонки; ДС – датчик скорости; РС – реле скорости движения. 12 Система управления осуществляет логическое управление силовыми контакторами, подключающими ЭД к тяговым аккумуляторным батареям. В соответствии с разработанной логикой контакторы могут включаться либо при нажатой педали акселератора, либо после достижения автомобилем определенной скорости движения. В разработанной системе управления регулирование ЭД осуществляется путем ступенчатого изменения напряжения питания: на ЭД подается напряжение питания, равное 48 В, ЭД разгоняется до частоты вращения вала 177,9 рад/с (1694 об/мин) при введении в цепь якоря резистора сопротивлением 0,13 Ом и соответствующем регулировании тока возбуждения; на ЭД подается напряжение питания, равное 96 В, ЭД разгоняется, и при номинальной частоте вращения 261,7 рад/с (2492 об/мин) происходит шунтирование резистора в цепи якоря и осуществляется регулирование частоты вращения вверх от номинальной. При частоте вращения вала, равной 4200 об/мин, ЭД переводится из тягового режима в генераторный для подзарядки накопителей электрической энергии, т.к. количество энергии, подводимой от ЭД, резко уменьшается при работе ЭД на более высоких частотах вращения вала. Система управления электромеханическим приводом обеспечивает следующие характерные режимы работы автомобиля с КЭСУ: заряд тяговых аккумуляторных батарей; пуск ДВС и работа на холостом ходу; начало движения (трогание с места) и разгон; движение с установившейся скоростью; условия, создающие дополнительную силу сопротивления движению; условия, уменьшающие силы сопротивления качению; движение в режиме принудительного холостого хода; движение накатом. Суммарная внешняя скоростная характеристика КЭУ (сумма мощностей ДВС и ЭД), при управлении разработанной системой управления изображена на рис. 4. Рисунок 4 – Реальные внешние скоростные характеристики ЭД ПТ-125-12, ДВС ВАЗ-1111 и комбинированной энергетической установки 13 Также на рис. 4 изображена внешняя скоростная характеристика ДВС ВАЗ-1111 и ЭД ПТ-125-12. При построении характеристики ЭД учитывалось, что ТД и ЭД соединены между собой согласующим редуктором с передаточным числом, равным 1,4. Разработан алгоритм управления работой КЭСУ как объекта системы автоматического управления. Для осуществления процесса управления необходимо наличие трех основных элементов: объект управления, управляющая система (подсистема, устройство) и исполнительный орган. Система управления легкового автомобиля с КЭСУ ИЖ-2126, оборудованного ДВС и ЭД, может быть представлена следующими основными элементами: автомобиль с КЭСУ – управляемый объект; водитель и электронный блок управления работой ЭД – управляющая система; карбюратор ДВС, муфта сцепления, пускорегулирующая аппаратура ЭД и другие – исполнительный орган. Контролируемые величины, по которым ведется управление, называются управляемые или регулируемые величины. В зависимости от задачи управления (запуск ЭД и ДВС, движение гибридного автомобиля с постоянной скоростью, разгон автомобиля и т.п.) управляемыми величинами являются: угловая скорость вращения выходного вала гибридной энергосиловой установки, скорость движения автомобиля и др. На рис. 5 представлена разработанная функциональная схема управления легковым автомобилем с КЭСУ ИЖ-2126, с помощью которой можно проанализировать любой режим работы автомобиля с КЭСУ. Рассмотрим, например, разгон автомобиля (рис. 5). Водитель (управляющая система) нажимая (управляющий сигнал) на педаль акселератора хочет, чтобы автомобиль двигался с определенной скоростью, от тяговой аккумуляторной батареи АБ 1-АБ 8 (исполнительный орган) подается напряжение (управляющее воздействие) к системе питания ЭД, ротор ЭД начинает вращаться с частотой вращения, величина которой определена подведенным напряжением. Одновременно, происходит регулирование частоты вращения вала ЭД. На вход логического блока системы автоматического управления поступают сигналы от датчиков, которые характеризуют состояние управляемого объекта. Логический блок системы автоматического управления (управляющая система), сравнивает данные сигналы с теоретическими (расчетными), заложенными в электронный блок управления, и если эти значения отличаются друг от друга, то на выходе формируется сигнал о необходимом в данной ситуации управляющих воздействий. Логический блок системы автоматического управления (управляющая система) подает соответствующий ток (управляющий сигнал) в обмотку управления блока управления возбуждением (исполнительный орган), блок управления возбуждения увеличивает или уменьшает средний ток (управляющее воздействие) в обмотке возбуждения ЭД (объект управления), и происходит уменьшение или увеличение угловой скорости вращения вала КЭСУ. Управляемой величиной является скорость движения автомобиля. 14 Водитель-управляющая система Выключатель В1 Педаль акселератора Тяговые аккумуляторные батареи АБ 1, … АБ 8 Ключ зажигания Аккумуляторная батарея АБ 9 Датчик частоты вращения вала ЭД Шкив ЭД Блок управления возбуждением ЭД Ведущее колесо Ведущее колесо Шкив ДВС Датчик положения дроссельной заслонки Датчик скорости Реле скорости Логический блок системы управления ЭД ДВС Система автоматического управления электромеханическим приводом Гибридный автомобиль-объект управления Рисунок 5 – Функциональная схема системы управления автомобиля с КЭСУ Расчет тягово-скоростных свойств, экономичности использования электрической энергии и топливной экономичности автомобиля с КЭСУ показал, что разработанная система управления КЭСУ автомобиля обеспечивает: 1. Максимально возможную скорость на четвертой и пятой передаче, соответственно 103 и 111 км/ч. Максимально возможный преодолеваемый подъем на первой, второй, третьей, четвертой, пятой передаче соответственно 26,2%, 14,2%, 9,5%, 6,4%, 4,5%. Время разгона на пути 1000 метров равно 48,4 секунд. 2. Затраты электроэнергии ЭД при движении в ездовых циклах на 100 км пути автомобиля с КЭСУ: европейский ездовой цикл 9,5 кВт*ч; американский магистральный ездовой цикл 12,38 кВт*ч; американский городской ездовой цикл 7,72 кВт*ч; городской ездовой цикл 10,507 кВт*ч; магистральный ездовой цикл 12,1 кВт*ч. 3. При моделировании движения автомобиля с КЭСУ в городских условиях эксплуатации по ездовому и европейскому циклу были получены следующие результаты расхода топлива на 100 км пройденного пути, соответственно 3,15 и 3,92 литров, без учета затрат электрической энергии. 15 Четвертая глава посвящена описанию созданного автомобиля с КЭСУ, проведению экспериментальных исследований и лабораторно-дорожных испытаний легкового автомобиля ИЖ-2126 с разработанной системой управления в составе КЭСУ, а также разработке наиболее рационального алгоритма управления режимами работы КЭСУ. В ГОУ ВПО "Ижевский государственный технический университет" совместно с ОАО "ИжАвто" был создан гибридный легковой автомобиль на базе автомобиля ИЖ-2126, КЭСУ которого выполнена по параллельной конструктивной схеме, который состоит из следующих основных элементов: - комбинированная энергосиловая установка, состоит из комбинированной энергетической установки и агрегатов трансмиссии; - пускорегулирующая аппаратура (ПРА), главной функцией которой является согласование работы обоих двигателей силовой установки при передаче вращающих моментов по заданной программе, моделирующей реальные условия движения гибридного автомобиля; - накопитель электрической энергии, представляет собой два блока свинцово-кислотных аккумуляторных батарей марки 6СТ-55, по четыре батареи в блоке, характеристика батареи: емкость 55 А*ч, напряжение 12 В, масса 15,5 кг; - автомобиль носитель ИЖ-2126. Комбинированная энергетическая установка состоит из следующих основных элементов: - двигатель внутреннего сгорания ДВС ВАЗ-1111: максимальная мощность 22 кВт, максимальный вращающий момент 45 Н*м, рабочий объем 0,649 литра, степень сжатия 9,6, топливо АИ-92; - электрический двигатель постоянного тока ЭД ПТ-125-12: напряжение на шунтовой обмотке возбуждения 70 В, ток возбуждения шунтовой обмотки 4,5 А, напряжение питания якоря 120 В, ток якоря не более 120 А, масса ЭД не более 68 кг, мощность 10 кВт, максимальный вращающий момент на валу 49 Н*м; - согласующий ременный редуктор, предназначен для передачи вращающего момента от ДВС и ЭД на один выходной вал комбинированной энергосиловой установки. Передаточное число согласующего редуктора равно 1,4, так как максимально-возможная частота вращения вала ЭД равна 8400 об/мин, а у ВАЗ-1111 – 5600 об/мин. При проведении экспериментальных исследований легкового автомобиля ИЖ-2126, были проведены работы по исследованию режимов работы систем легкового автомобиля с КЭСУ и его тягово-динамических качеств на стенде с беговыми барабанами с фиксированием количественных характеристик. В процессе исследований оценивалось: качество трансмиссии, мощность ДВС, совместная работа двигателей в тяговом режиме и торможении, совместная работа двигателей в режиме рекуперации, совместная работа двигателей при движении по европейскому городскому циклу. Проведенные лабораторно-дорожные испытания показали: 1. Снаряженная масса и пять человек в салоне 1510 кг, на переднюю ось приходится 738 кг, а на заднюю 772 кг (для серийного автомобиля ИЖ-2126, 16 снаряженная масса и пять человек в салоне с дополнительным грузом в багажнике 50 кг по 10 кг на каждого человека 1440 кг, на переднюю ось приходится 677 кг, а на заднюю 763 кг). 2. Результаты испытаний легкового автомобиля с КЭСУ на скоростные свойства: путь свободного качения со скорости 50 км/ч составил 505 метров; время разгона с места до скорости 60 км/ч составило 13 секунд; максимальная скорость на третьей и четвертой передаче равна, соответственно 103 и 88 км/ч. 3. Автомобиль с КЭСУ полностью обеспечивает выполнение норм ЕВРО2 и выполнение норм ЕВРО-3 по выбросам СО. Общие выбросы в атмосферу токсичных составляющих с отработавшими газами в сравнении с серийными автомобилями ИЖ-2126 уменьшаются на 35-40 %. 4. Расход топлива автомобиля с КЭСУ по сравнению с базовым автомобилем ИЖ-2126 в городском режиме движения уменьшается на 25-31 %. Автомобиль обеспечивает максимальную скорость движения 90 км/ч. Автомобиль с КЭСУ обладает хорошей динамикой разгона и не создает помех в транспортных потоках автомобилей. Эксплуатационный расход топлива гибридного автомобиля в загородном режиме движения, при средней эксплуатационной скорости движения 65,5 км/ч расход топлива составил 7.3 л/100 км. 5. На загородном маршруте протяженностью 154 км, были проведены контрольные заезды по определению эффективности работы пускорегулирующей аппаратуры с точки зрения контроля и подзарядки накопителя энергии, заряженность аккумуляторных батарей в процессе испытательных заездов не изменилась, что свидетельствует об ограничении запаса хода гибридного автомобиля только емкостью топливного бака. 6. Запас хода только на накопителях электрической энергии (в режиме движения чистого электромобиля) составил 68 км, а максимально возможная скорость движения в этом режиме составила примерно 50 км/ч. На основании проведенных исследований и испытаний, для повышения эффективности работы системы управления КЭСУ, и как следствие улучшение экономичности, тягово-скоростных свойств и экологичности автомобиля с КЭСУ, был разработан наиболее рациональный алгоритм управления режимами работы КЭСУ. В качестве определяющих параметров взяты: частота вращения вала КЭУ, значение положения педали акселератора, скорость движения и ускорение гибридного автомобиля. Требования к рабочему состоянию ДВС и ЭД в зависимости от контролируемых параметров в процессе движения автомобиля представлены в табл. 1. Разработана наиболее рациональная логика работы пускорегулирующей аппаратуры для выбранной КЭСУ, которую желательно реализовать в электронном блоке управления. При этом в рассматриваемых режимах движения исследуемого автомобиля с КЭСУ должны выполнятся следующие условия: - при замедлении, торможении и при движении накатом с ускорением J < -0.2 м/с2 подача топлива в ДВС прекращается. Значение J, равное 0.2 м/с2, соответствует началу устойчивого восприятия организмом человека продольных ускорений, т.е. при ускорениях по модулю более 0.2 м/с2 человек однозначно может сделать вывод, что автомобиль движется с ускорением (замедлением); 17 Таблица 1 – Состояние ЭД и ДВС в зависимости от контролируемых параметров № Частота Значение Значение Значение СостояСостояние п/п вращеположе- скорости ускорение ЭД ДВС ния вала ния педвижения автоne в дали акния авмобиля J об/мин селератомобив м/с2 тора Ug в ля V в % км/ч 1 Любые Ug < 90 Любые J < -0.2 Рекуперация Отключен 2 Любые Ug < 90 V < 20 -0.2<J<0.2 Работает Отключен 3 Любые Ug < 90 V < 20 4 Любые Ug < 90 V > 20 5 6 7 8 9 ne < 4132 Любые Любые ne > 4132 Любые Ug < 90 Ug > 90 Ug > 90 Ug < 90 Ug = 0 V > 20 V < 20 V > 20 V > 20 Любые J > 0.2 Работает -0.2<J<0.2 Идет зарядка накопителя электрической энергии J > 0.2 Работает Любые Работает Любые Работает J > 0.2 Отключен J > 0.2 Рекуперация Отключен Работает Работает Отключен Работает Работает Отключен - при движении с низкими скоростями (для ИЖ-2126, оборудованного рассматриваемыми ДВС ВАЗ-1111 и ЭД ПТ-125-12, скорость движения менее 20 км/ч) подача топлива в ДВС также должна быть перекрыта, что позволит исключить работу ДВС на этих неэкономичных и токсичных режимах. При введении в конструкцию автоматического сцепления ДВС вообще нужно отключать; - ЭД имеет высокий вращающий момент при малых частотах вращения вала, что может приводить к нарушению сцепления шин ведущих колес с полотном дороги. Поэтому для рационального использования электрической энергии аккумуляторных батарей следует ограничить крутящий момент, поступающий от ЭД, для эксплуатации гибридного автомобиля на реальных дорогах значением 13 кг*м; - при движении на квазиустановившихся режимах на высоких скоростях (более 20 км/ч) должна идти зарядка накопителя электрической энергии. Необходимость начала и окончания зарядки в данных режимах движения должна контролироваться системой управления в зависимости от степени заряженности накопителей электрической энергии; - в рассматриваемых комбинированных энергетических установках целесообразно отключать ЭД при частоте вращения его вала более 4132 об/мин, т.к. количество энергии, подводимой от ЭД, резко уменьшается при движении на 18 более высоких частотах вращения вала. Отключение ЭД практически не влияет на скоростные свойства, при этом экономится электроэнергия накопителя; - разгон автомобиля желательно осуществлять при работе рассматриваемого типа ДВС на режимах наивысшей топливной эффективности, т.е. примерно при 85-90 % нажатия на педаль акселератора; - на остановках система управления должна отключать ЭД (ДВС будет отключен раньше в начале процесса торможения-замедления). Вспомогательное оборудование при этом должно работать от накопителя электрической энергии; - при торможении, замедлении (Ug < 85-90 %, J < - 0.2 м/с2) и при движении накатом с ускорением (Ug = 0 %, J > 0.2 м/с2) должна включаться система рекуперации энергии. При этом ДВС не работает, так как нет подачи топлива. ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ 1. Кардинальное снижение расхода топлива и уменьшение токсичности отработавших газов на автомобилях с КЭСУ может быть осуществлено применением в составе КЭСУ параллельной компоновочной схемы маломощного теплового двигателя, работающего в более благоприятном режиме за счет совместной работы с ЭД или совсем отключаемого в некоторых режимах движения. 2. Для автомобиля среднего класса применение КЭСУ позволяет обеспечить хорошие тягово-скоростные свойства при подводе к ведущим колесам на наиболее характерных режимах движения от ЭД примерно 10-12 кВт. При этом максимальная мощность теплового двигателя должна быть более 24 кВт. 3. В системе управления работой КЭСУ наиболее рационально реализовать следующие режимы движения: запуск теплового двигателя с помощью ЭД работающего в качестве стартера; движение автомобиля на малых скоростях при работе только ЭД для обеспечения высоких показателей экономичности; движение с квазиустановившимися скоростями только на тепловом двигателе для экономии энергии; разгон автомобиля при совместной работе теплового и электрического двигателей; рекуперация энергии при торможении и замедлении; работа ЭД в генераторном режиме при движении только на тепловом двигателе при необходимости заряда накопителя энергии; отключение теплового двигателя на остановках. 4. Выполнены теоретические исследования по обоснованию наиболее эффективных алгоритмов и моделей электронного управления работой ГЭСУ, которые показали, что наиболее эффективной, в настоящее время, является системы бесконтактного тиристорного управления и микропроцессорные системы управления, а наиболее предпочтительным видом регулирования скорости вращения двигателя постоянного тока – якорное и полюсное регулирование. 5. Разработана система управления КЭСУ, основной частью которой является логический блок управления, управляющий режимами работы ЭД в зависимости от положения педали акселератора, скорости движения автомобиля и частот вращения валов ДВС и ЭД, с помощью блока управления возбуждением БУ, промежуточных реле, контакторов и т.д. В основу алгоритма положены 19 расчетные исследования эффективности работы системы по показателям тягово-скоростных свойств и топливной экономичности. 6. В основу разработки системы управления работой КЭСУ должны быть положены основные принципы теории автоматического управления и мехатронных систем. На основе проведенных исследовании разработан алгоритм управления работой ГЭСУ автомобиля как объекта теории автоматического управления. Разработаны функциональные и структурные схемы управления работой легкового автомобиля с КЭСУ. 7. Затраты энергии исследуемого автомобиля ИЖ-2126 с КЭСУ на 100 км пути: европейский ездовой цикл – 9,50 кВт*ч; американский магистральный ездовой цикл – 12.38 кВт*ч; американский городской ездовой цикл – 7.72 кВт*ч; городской и магистральный ездовой цикл в соответствии с ГОСТ 20306-85 соответственно 10,51 кВт*ч и 12,1 кВт*ч. Расчеты энергии необходимы для обеспечения заряженности и обоснования объема накопителя энергии (обеспечение баланса электроэнергии при создании системы управления). 8. Для повышения эффективности работы системы управления КЭСУ в алгоритм управления дополнительно к показателям скоростного и нагрузочного режимов (датчик скорости и нагрузки) необходимо вводить датчик ускорения автомобиля в процессе движения. 9. Проведенные лабораторно-дорожные испытания легкового автомобиля ИЖ-2126 показали, что КЭСУ при управлении разработанной системой управления обеспечивает: повышение топливной экономичности примерно на 25-31 % и уменьшение выбросов токсичных веществ на 30-40 % (без изменения конструкции ходовой части и кузова автомобиля ИЖ-2126) в сравнении с базовой моделью автомобиля ИЖ-2126, оборудованного серийным двигателем; заряженность аккумуляторных батарей в процессе испытательных заездов не изменяется, поэтому запас хода гибридного автомобиля ИЖ-2126 ограничен только емкостью топливного бака; средняя скорость движения по загородным дорогам общего пользования равна 65,3 км/ч; максимально возможная скорость движения в режиме чистого электромобиля (работает только ЭД) составила примерно 50 км/ч. Основные положения и результаты диссертации опубликованы в следующих работах: Монография: 1. Умняшкин В.А., Филькин Н.М., Музафаров Р.С., Копотев Д.А. Математическое моделирование динамики транспортных машин, оборудованных комбинированными энергосиловыми установками. – Ижевск: Научноиздательский центр "Регулярная и хаотическая динамика", 2009. – 74 с. Публикации в изданиях, рекомендованных ВАК: 2. Филькин Н.М., Копотев Д.А., Галеев И.И., Мазец В.К. Энергетический подход к обоснованию показателя эффективности эксплуатации автотранспортного средства// Грузовик &. – 2009. – № 11. 3. Копотев Д.А., Филькин Н.М. Система управления комбинированной энергосиловой установкой гибридного легкового автомобиля// Вестник 20 ИжГТУ: Периодический научно-теоретический журнал Ижевского государственного технического университета. – Вып. 2. – Ижевск: ИжГТУ, 2010. – С. 8-11. 4. Копотев Д.А., Филькин Н.М. Алгоритм управления комбинированной энергосиловой установкой легкового автомобиля// Вестник ИжГТУ: Периодический научно-теоретический журнал Ижевского государственного технического университета. – Вып. 1. – Ижевск: ИжГТУ, 2011. – С. 40-43. Публикации в других изданиях: 5. Копотев Д.А., Филькин Н.М. Разработка алгоритма управления электромеханическим приводом гибридного легкового автомобиля// Современные наукоемкие технологии. – 2007. – № 11. – С. 70-71. Заочная электронная конференция "Автомобиле- и тракторостроение: проектирование, конструирование, расчет и технологии ремонта и производства", 15-20 июня, 2007 г. 6. Филькин Н.М., Усцов В.О., Копотев Д.А. Разработка системы управления гибридного легкового автомобиля// Успехи современного естествознания. – 2008. – № 4. – С. 139-140. Заочная электронная конференция "Автомобиле- и тракторостроение: проектирование, конструирование, расчет и технологии ремонта и производства". 7. Копотев Д.А., Филькин Н.М. Алгоритм управления комбинированной энергосиловой установкой гибридного легкового автомобиля// Материалы Всероссийской научно-технической конференции "Проблемы и перспективы автомобилестроения в России". – Ижевск: Издательство ИжГТУ, 2008. – С. 105-107. 8. Филькин Н.М., Копотев Д.А. Обзор работ по созданию гибридных автомобилей, проводимых ведущими автомобильными компаниями мира в 20062007 годах// Материалы Всероссийской научно-технической конференции "Проблемы и перспективы автомобилестроения в России". – Ижевск: Издательство ИжГТУ, 2008. – С. 144-256. 9. Филькин Н.М., Копотев Д.А. Система управления гибридным электромеханическим приводом легкового автомобиля// Сборник материалов 4-ой Всероссийской научно-технической конференции «Проблемы и достижения автотранспортного комплекса». – Екатеринбург: УГТУ-УПИ, 2008. – С. 205 -207. 10. Умняшкин В.А., Филькин Н.М., Копотев Д.А., Галлеев И.И. Основы методики расчета и обоснования базовых параметров гибридной энергосиловой установки легкового автомобиля// Интеллектуальные системы в производстве: Периодический научно-практический журнал Ижевского государственного технического университета. – Вып. 1 (11). – Ижевск: ИжГТУ, 2008. – С. 164174. 11. Копотев Д.А., Филькин Н.М. Гибридный легковой автомобиль как объект теории автоматического управления// Материалы Международной научно-технической конференции "Проблемы транспортных и технологических комплексов". – Нижний Новгород: Издательство НГТУ, 2008. – С. 224-226. 12. Копотев Д.А., Филькин Н.М. Функциональная и структурная схемы системы управления гибридным автомобилем// Материалы Международной научно-технической конференции к 30-летию автодорожного факультета Пермского государственного университета "Состояние и перспективы транс21 порта. Обеспечение безопасности дорожного движения". – Том 1. – Пермь: Издательство ПГТУ, 2009. – С. 329-335. 13. Шиляев С.А., Умняшкин В.А., Копотев Д.А., Братухин К.С. Основные положения создания гибридного автомобиля с параллельной компоновочной схемой энергетической установки // Проведение научных исследований в области машиностроения: сборник материалов Всероссийской научнотехнической конференции с элементами научной школы для молодежи. Тольятти, 27-28 ноября 2009 г. В 3-х ч. / под общ. ред. М.М. Криштала. – Тольятти: ТГУ, 2009. – Ч.2. – С.180-182. 14. Филькин Н.М., Копотев Д.А., Фролов М.М. Конструкция, система управления и результаты экспериментальных исследований гибридного легкового автомобиля// Сборник трудов Международной научно-технической конференции "Образование и наука производству. – Часть 1, книга 2. – Набережные Челны: Изд-во Камской государственной инженерно-экономической академии, 2010. – С. 279-284. Научно-технические отчеты: 15. Разработка научных основ расчета, проектирования и конструирования гибридных энергосиловых установок (ГЭСУ) транспортных машин и создание экспериментального образца городского автомобиля особо малого класса (квадрицикла) с ГЭСУ: Промежуточный (1-й этап) отчет о научноисследовательской работе, выполненной в рамках аналитической ведомственной целевой программы "Развитие научного потенциала высшей школы (20062008 годы)". Номер государственной регистрации НИР: ВНТИЦ, 01.2.006 06492/ Ижевский государственный технический университет; Руководитель работы В.А. Умняшкин. – Ижевск: ИжГТУ, 2008. – 195 с. – Отв. исполн. Н.М. Филькин; Соисполн.: Р.С. Музафаров, С.А. Шиляев, Д.А. Копотев и д.р. 16. Разработка научных основ расчета, проектирования и конструирования гибридных энергосиловых установок (ГЭСУ) транспортных машин и создание экспериментального образца городского автомобиля особо малого класса (квадрицикла) с ГЭСУ: Заключительный (2-й этап) отчет о научноисследовательской работе, выполненной в рамках аналитической ведомственной целевой программы "Развитие научного потенциала высшей школы (20062008 годы)". Номер государственной регистрации НИР: ВНТИЦ, 01.2.006 06492/ Ижевский государственный технический университет; Руководитель работы В.А. Умняшкин. – Ижевск: ИжГТУ, 2008. – 173 с. – Отв. исполн. Н.М. Филькин; Соисполн.: Р.С. Музафаров, С.А. Шиляев, Д.А. Копотев и д.р. 17. Разработка методик структурной и параметрической оптимизации комбинированных (гибридных) энергосиловых установок транспортных средств: Промежуточный (1-й этап) отчет о научно-исследовательской работе, выполненной в рамках аналитической ведомственной целевой программы "Развитие научного потенциала высшей школы (2009-2010 годы)". Номер государственной регистрации НИР: ВНТИЦ, 01.2.00 901933/ Ижевский государственный технический университет; Руководитель работы Н.М. Филькин. – Ижевск: ИжГТУ, 2009. – 112 с. – Отв. исполн. В.А. Умняшкин; Соисполн.: Р.С. Музафаров, С.А. Шиляев, Д.А. Копотев и д.р. 22 18. Создание энергоэффективных двигателей и движителей для транспортных средств, по проблеме «Создание комбинированной энергосиловой установки для городского легкового автомобиля: Промежуточный (1-й этап) отчет о поисковой научно-исследовательской работе, выполненной в рамках мероприятия №1.2.2 «Проведение научных исследований научными группами под руководством кандидатов наук» федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы» / Государственный контракт № П1449 от 03 сентября 2009 г. / Ижевский государственный технический университет; Руководитель проекта В.А. Шиляев. – Ижевск: ИжГТУ, 2009. – 102 с. – Отв. исполн. Д.А. Копотев; Соисполн.: А.И. Старков, К.С. Братухин, А.Р. Имангулов. 19. Создание энергоэффективных двигателей и движителей для транспортных средств, по проблеме «Создание комбинированной энергосиловой установки для городского легкового автомобиля: Промежуточный (2-й этап) отчет о поисковой научно-исследовательской работе, выполненной в рамках мероприятия №1.2.2 «Проведение научных исследований научными группами под руководством кандидатов наук» федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы» / Государственный контракт № П1449 от 03 сентября 2009 г. / Ижевский государственный технический университет; Руководитель проекта В.А. Шиляев. – Ижевск: ИжГТУ, 2010. – 150 с. – Отв. исполн. Д.А. Копотев; Соисполн.: А.И. Старков, К.С. Братухин, А.Р. Имангулов, В.К. Мазец. 20. Разработка методик структурной и параметрической оптимизации комбинированных (гибридных) энергосиловых установок транспортных средств: Заключительный отчет (4-ый этап) о научно-исследовательской работе, выполненной в рамках аналитической ведомственной целевой программы "Развитие научного потенциала высшей школы (2009-2010 годы)". Номер государственной регистрации НИР: ВНТИЦ, 01.2.00 901933/ Ижевский государственный технический университет; Руководитель работы Н.М. Филькин. – Ижевск: ИжГТУ, 2010. – 147 с. – Отв. исполн. В.А. Умняшкин; Соисполн.: Р.С. Музафаров, С.А. Шиляев, Е.В. Кулиш, Д.А. Копотев и д.р. Копотев Дмитрий Алексеевич Автореферат диссертации на соискание ученой степени кандидата технических наук «Разработка системы управления комбинированной энергосиловой установки параллельной компоновочной схемы теплового и электрического двигателей легкового автомобиля» Подписано в печать 25.03.2011 Заказ № 78 23 Тираж 100 экз. Бумага типографская Формат 60*90/16 ИжГТУ, 426069, г. Ижевск, ул. Студенческая, дом 7 24