на сколько могут приблизиться хищник и жертва соответственно
реклама

Филиал Московского государственного университета
имени М.В. Ломоносова в г.Ташкенте
ХАЙДАРОВ Отабек Илхом Угли
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
на тему «Автоматное моделирование процесса преследования в
бесконечной полосе»
на соискание степени бакалавра
по направлению 010500 - «Прикладная математика и информатика»
ВКР рассмотрена и рекомендована к
защите
Зав. кафедрой «МаТИС» д.ф.-м.н.,
профессор
Научныйруководитель:
м.н.с.
_________Кудрявцев В.Б.
______________ ВолковН.Ю.
«___»____________2013год
«___»_________2013год
Ташкент 2013
Аннотация
Изучается процесс преследования независимой системой
автоматов («хищников») нескольких других, независимых друг
от друга, автоматов («жертв») в бесконечной полосе ширины 𝑙.
Показано, что любой автомат не обходит никакую 𝑙 полосу.
Построена независимая система из двух автоматов-хищников,
которая при любом натуральном 𝑙 обходит полосу ширины 𝑙, а
следовательно, ловит в этом лабиринте всех неподвижных
жертв.
Содержание
1. Введение
2. Основные понятия и определения
3. Траектории автоматов в полосе
4. Основные теоремы о поимке
5. Список использованной литературы
Введение
Рассматривается автоматный аналог ситуации преследования хищниками
своих жертв. Преследование происходит в лабиринте, представляющем
собой бесконечную полосу ширины 𝑙. Хищники и жертвы не имеют
возможности покидать этот лабиринт.
Хищники и жертвы представлены в виде независимых систем автоматов.
То есть хищники (жертвы) способны “видеть” жертв (хищников) в некоторой
своей окрестности, но “не видят” других хищников (жертв). В зависимости от
своего входного символа (показывающего происходящее в зоне обзора
автомата) и своего внутреннего состояния каждый автомат вырабатывает
выходной символ, который интерпретируется, как направление, в котором
он должен переместиться. Хищники и жертвы ходят поочередно.
Задается расположение хищников и жертв в полосе в начальный момент
времени. Дальнейшее их перемещение однозначно задается начальными
расположениями автоматов и их поведением, определяемым их
внутренними логиками, как описано выше.
Жертва считается пойманной, если она оказывается в фиксированной
окрестности одного из хищников.
В работе показано, что последовательность выходных символов любого
конечного автомата в полосе любого размера периодична. Получены оценки
на предпериод и период.
Показано, что любой автомат не обходит никакую 𝑙-полосу.Построен
пример независимой системы автоматов из двух автоматов-хищников,
которая обходит полосу любой ширины. Эта пара автоматов-хищников
способна поймать всех неподвижных жертв в данном лабиринте.
Выражаю благодарность Н. Ю. Волкову за научное руководство.
Основные понятия и результаты
Будем использовать стандартные обозначения для множеств
натуральных и целых числе ℕи ℤ, соответственно. Положим ℕ0 = ℕ ∪ {0}.
Множество клеток, на которые плоскость разбивается целочисленной
решеткой, обозначим через ℤ2 , сопоставляя каждой клетке координаты ее
левого нижнего угла.
Определим лабиринт 𝐿2 (𝑙) = {(𝑥, 𝑦)|0 < 𝑥 < 𝑙, 𝑥, 𝑦 ∈ ℤ}, где 𝑙 ∈ ℕ.
Назовем его -полосой. Назовем -окрестностью клетки (𝑥0 , 𝑦0 ) множество
𝐷(𝑥0,𝑦0),𝑟 = {(𝑥, 𝑦)|(𝑥, 𝑦) ∈ ℤ2 , (|𝑥 − 𝑥0 | + |𝑦 − 𝑦0 |) ≤ 𝑟},
Где 𝑟 ∈ ℕ0 . Будем считать, что задана определенная нумерация клеток
множества 𝐷(𝑥0 ,𝑦0),𝑟 .
Под автоматом будем понимать инициальный конечный автомат вида
𝒜 = (𝐴, 𝑄, 𝐵, 𝜑, 𝜓, 𝑞0 ), где 𝐴–входной, 𝐵– выходной, 𝑄–внутренний алфавит
автомата 𝒜, 𝜑: 𝑄 × 𝐴 → 𝑄и 𝜓: 𝑄 × 𝐴 → 𝐵–функции переходов и выходов 𝒜,
соответственно, 𝑞0 ∈ 𝑄–его начальное состояние. Алфавит 𝐴определяет
возможности 𝒜 «видеть» происходящее вокруг, а алфавит 𝐵– его
возможности перемещаться. Алфавит 𝑄и функции 𝜑 и 𝜓задают внутреннюю
логику автомата 𝒜.
Рассмотрим автомат 𝒜, перемещающийся в 𝐿2 (𝑙). Выходным алфавитом
𝒜 является множество 𝐵 = 𝐷(0,0),𝑉 , где параметр 𝑉 ∈ ℕназывается
скоростьюавтомата𝒜. Входной алфавит 𝒜 зависит от параметра 𝑅 ∈
ℕ (𝑅 ≥ 𝑉), называемого обзором автомата.
Автомат со скоростью 𝑉и обзором 𝑅будем обозначать как 𝒜(𝑅, 𝑉). Пусть
𝒜(𝑅, 𝑉)находится в клетке (𝑥0 , 𝑦0 ). Множество 𝐷(𝑥0 ,𝑦0),𝑉 ∩ 𝐿называется
окрестностью хода 𝒜, а множество ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅
𝐷(𝑥 ,𝑦 ),(𝑅−1) ∩ 𝐿–зоной обзора 𝒜.
0
0
Рассмотрим две системы автоматов 𝐾 = (𝑊1 , … , 𝑊𝑚 )(𝑅, 𝑉)(хищники)
и𝑆 = (𝑈1 , … , 𝑈𝑛 )(𝑅′, 𝑉′) (жертвы), где 𝑅и 𝑅′ – обзоры, а 𝑉и 𝑉′ – скорости
хищников и жертв, соответственно. Здесь 𝑆и 𝐾– независимые системы
автоматов. Пусть каждая жертва 𝑈𝑖 находится в клетке (𝑥 ′ 𝑖 , 𝑦′𝑖 )лабиринта 𝐿, а
каждый хищник 𝑊𝑗 находится в клетке (𝑥𝑗 , 𝑦𝑗 )лабиринта 𝐿в состоянии 𝑞𝑗 .
Положим 𝑁 ′ = (𝑅′ + 1)2 + (𝑅′)2 – количество клеток множества
𝐷(𝑥0 ,𝑦0),𝑅′ , то есть, максимально возможный размер зоны обзора жертвы (это
число также одинаково для всех клеток (𝑥0 , 𝑦0 )). Для каждого 𝑖 =
1, … , 𝑛определим строку (𝑎′1 , … , 𝑎′ 𝑁′ )следующим образом. Для любого 𝑘 =
1, … , 𝑁′
−1, если 𝑘клетка множества𝐷(𝑥𝑗,𝑦𝑗),𝑅′
не принадлежит лабиринту𝐿;
𝑎𝑘′ = 1, если в 𝑘 клетке множества 𝐷(𝑥𝑗,𝑦𝑗),𝑅′ находится
{
хотя бы один хищник;
0, иначе.
Строку (𝑎′1 , … , 𝑎′𝑁′ )назовем 𝑈𝑖 -конфигурацией.Каждая 𝑈𝑖 -конфигурация
однозначно задает клетки зоны обзора 𝑈𝑖 не принадлежащие лабиринту, а
также клетки зоны обзора 𝑈𝑖 в которых находятся хищники.
Положим 𝑁 = (𝑅 + 1)2 + 𝑅2 – количество клеток множества 𝐷(𝑥0,𝑦0),𝑅 , то
есть, максимально возможный размер зоны обзора хищника (это число
также одинаково для всех клеток (𝑥0 , 𝑦0 )). Для каждого 𝑗 =
1, … , 𝑚определим строку (𝑎1 , … , 𝑎𝑁+𝑚 )следующим образом. Для любого 𝑘 =
1, … , 𝑁
−1, если𝑘клетка множества𝐷(𝑥𝑗,𝑦𝑗),𝑅
не принадлежит лабиринту𝐿;
𝑎𝑘 = 1, если в 𝑘 клетке множества 𝐷(𝑥𝑗,𝑦𝑗),𝑅 находится
{
хотя бы одна жертва;
0, иначе.
Строку (𝑎1 , … , 𝑎𝑁 )назовем 𝑊𝑗 -конфигурацией. Каждая 𝑊𝑗 -конфигурация
однозначно задает клетки зоны обзора 𝑊𝑗 , не принадлежащие лабиринту, а
также клетки зоны обзора 𝑊𝑗 в которых находятся жертвы.
Расположение в лабиринте 𝐿жертв и хищников и состояния хищников
однозначно задают все 𝑈𝑖 -конфигурации и все 𝑊𝑗 -конфигурации. Множества
всех 𝑈𝑖 -конфигураций и 𝑊𝑗 -конфигурацийпри всевозможных расположениях
жертв и хищников и состояниях хищников конечны. Обозначим множество
всех 𝑈𝑖 -конфигураций как 𝐹′. Аналогично, множество всех 𝑊𝑗 конфигурацийобозначим как 𝐹. Входным алфавитом каждой жертвы 𝑈𝑖
является множество всех пар вида (ℱ ′1 , ℱ′2 ), где ℱ′1 ∈ ({∅} ∪ 𝐹′), а ℱ′2 ∈ 𝐹′.
Входным алфавитом каждого хищника 𝑊𝑗 является множество всех пар вида
(ℱ1 , ℱ2 ), где ℱ1 , ℱ2 ∈ 𝐹.
Момент времени 2𝜏 (𝜏 ∈ ℕ0 ) называется -моментом хода жертв.
Момент (2𝜏 + 1)называется -моментом хода хищников. Промежуток
времени [2𝜏, (2𝜏 + 1)]называется тактом с номером 𝜏. Время
взаимодействия автоматов будем измерять в тактах.
Будем рассматривать только такие автоматы (жертв и хищников), для
которых перемещение на вектор, равный выходному символу 𝑏̅ никогда не
выводит за пределы лабиринта, в котором происходит преследование.
Хищник 𝐾 «ловит» жертву, если жертва в некоторый момент времени
оказалась в окрестности хода хищника. Пойманная жертва исчезает из
лабиринта.
Расположение системы автоматов в лабиринте, при котором все эти
автоматы находятся в одной клетке, назовем каноническим. Зафиксируем
𝑅, 𝑉 ∈ ℕ, такие что 2 ≤ 𝑉 ≤ 𝑅.
Также будем считать, что обзор жертвы всегда не больше обзора
хищника, а скорость жертвы всегда меньше скорости хищника. Иначе при
разумном поведении жертвы, она никогда не будет поймана.
Назовем левым и правымбортом полосы множества {(𝑥, 𝑦)|𝑥 = 0, 𝑦 ∈ ℤ}
и {(𝑥, 𝑦)|𝑥 = 𝑙 + 1, 𝑦 ∈ ℤ} лабиринта 𝐿2 (𝑙).
Будем говорить, что автомат𝒜(𝑅, 𝑉)видит некоторый борт
лабиринта на расстоянии ℎ (ℎ ∈ ℕ, ℎ ≤ 𝑅), если хотя бы одна клетка этого
борта находится в ℎ-окрестности клетки, в которой находится 𝒜, причем ни
одна клетка этого борта не находится в (ℎ − 1)-окрестности клетки, в
которой находится 𝒜. Если существует ℎ ∈ ℕ, ℎ ≤ 𝑅, такое что, автомат
𝒜видит некоторый борт лабиринта на расстоянии ℎ, будем говорить, что
𝒜видит этот борт.
Аналогично определяются ситуации, в которых будем говорить, что
автомат 𝒜1 видит автомат 𝒜2 на расстоянии ℎ (ℎ ≤ 𝑅), или 𝒜1 видит
автомат 𝒜2 .
Независимая система автоматов 𝐾 обходит лабиринт 𝐿, если, стартуя из
любой клетки лабиринта 𝐿 (все автоматы из одной клетки), они
перемещаются так, что для любой клетки (𝑥, 𝑦) лабиринта 𝐿 существует
автомат из 𝐾 и момент времени 𝑡, в который данный автомат окажется в
клетке (𝑥, 𝑦).
Траектории автоматов в полосе
Пусть автомат 𝒜перемещается в лабиринте 𝐿2 (𝑙) и его выходные
символы в такты 𝜏1 , 𝜏1 + 1, … , 𝜏2 равны 𝑏̅𝜏1 , 𝑏̅𝜏1+1 , … , 𝑏̅𝜏2 , соответственно.
Вектором перемещения (или просто перемещением) автомата 𝒜 за
промежуток времени [𝜏1 , 𝜏2 ]называется вектор 𝑠̅ = 𝑏̅𝜏1 , 𝑏̅𝜏1 +1 , … , 𝑏̅𝜏2 . Пусть
вектор 𝑠̅ имеет координаты 𝑠1 и 𝑠2 (𝑠⃗ = (𝑠1 , 𝑠2 )). Положим |𝑠̅ | = |𝑠̅1 | + |𝑠̅2 |.
Если автомат перемещается в лабиринте с периодической
последовательностью выходных символов, обозначим длину периода этой
последовательности как 𝑑, длину последовательности как 𝑠⃗ = (𝑠1 , 𝑠2 ).
Траекторией автомата назовем множество клеток плоскости, которые
он посещает за время своего функционирования. Траекторией коллектива
назовем объединение траекторий его автоматов.
В работе [2] Н. Ю. Волковым показано, что если автомат (коллектив из
двух автоматов) движется по плоскости так, что в его зону обзора (зону
обзора каждого автомата коллектива) не попадают другие автоматы
(автоматы не из данного коллектива), то последовательность выходных
символов автомата (коллектива) периодична. Кроме того, показано, что
траекторию такого автомата можно заключить в полуполосу.
Полуполосой автомата назовем минимальную по включению
полуполосу, полностью содержащую траекторию автомата, построенную в
предположении, что автомат движется один по бесконечной плоскости.
Лемма 1.Произвольный конечный автомат 𝒜(𝑅, 𝑉)с𝑛состояниями
перемещающийся по плоскости (так что другие автоматы не попадают в
его зону обзора), имеет периодическую последовательность выходных
символов и длина периода этой последовательности 𝑑, длина предпериода
𝑑0 и перемещение |𝑠|автомата 𝒜 за период этой последовательности
удовлетворяют неравенствам 𝑑0 + 𝑑 ≤ 𝑛, |𝑠⃗| ≤ 𝑉 ∙ 𝑑.
Доказательство.Так как, по условии, в зону обзора автомата не попадают
другие автоматы, его входной символ постоянен. Поскольку 𝒜 имеет не
более чем 𝑛 различныхсостояний: 𝑞(1), 𝑞(2), … , 𝑞(𝜏) …, не позднее чем
через 𝑛тактов он окажется в состоянии, в котором уже находился, то есть
выполнится 𝑞(𝑖) = 𝑞(𝑗), 1 ≤ 𝑖 ≤ 𝑗 ≤ 𝑛 + 1.Кроме того 𝑎(𝑖) = 𝑎(𝑗) = 𝑎.
𝑞(𝑖 + 1) = 𝜑(𝑎, 𝑞(𝑖)) = 𝜑(𝑎, 𝑞(𝑗)) = 𝑞(𝑗 + 1);
Применив это к последующим тактам 𝑑раз, где𝑑 = 𝑗 − 𝑖. Получим, что для
любого 𝜏 ≥ 𝑖
𝑞(𝜏 + 𝑑) = 𝑞(𝜏);
Таким образом, последовательность состояний периодична с предпериодом
𝑑0 = 𝑖 − 1и периодом𝑑 = 𝑗 − 𝑖;
Рассмотримвыходной символ автомата впроизвольный момент 𝜏 ≥ 𝑑0 .
𝑏(𝜏) = 𝜓(𝑎(𝜏), 𝑞(𝜏)) = 𝜓(𝑎(𝜏 + 𝑑), 𝑞(𝜏 + 𝑑)) = 𝑏(𝜏 + 𝑑);
((𝑥(𝑡), 𝑦(𝑡)) + 𝑏̅𝑡 = (𝑥(𝑡 + 1), 𝑦(𝑡 + 1)))
Рассмотримпериод 𝑏̅1 , … , 𝑏̅𝑑 , …выходной последовательности автомата.
Т. к. 𝒜(𝑅, 𝑉)имеет скорость 𝑉, для каждого 𝑖 = 1, … , 𝑑выполнено |𝑏̅𝑖 | ≤ 𝑉.
Следовательно, |𝑠⃗| = |𝑏̅1 + ⋯ + 𝑏̅𝑑 | ≤ 𝑉 ∙ 𝑑. Лемма доказана.
Лемма 2. Произвольный конечный автомат 𝒜(𝑅, 𝑉)с𝑛состояниями
перемещающийся в лабиринте 𝐿2 (𝑙) (так что другие автоматы не
попадают в его зону обзора), имеет периодическую последовательность
выходных символов. Где справедливо 𝑑0 + 𝑑 ≤ 𝑙 ∙ 𝑛, 𝑠1 = 0, |𝑠⃗| ≤ 𝑉 ∙ 𝑑.
Доказательство.Поскольку 𝐿 = 𝐿2 (𝑙)и 𝒜 имеет 𝑛состояний, не позднее, чем
через 𝑙 ∙ 𝑛тактов после начала функционирования, в такт 𝑗𝒜 окажется в
состоянии, в котором уже находился в некоторый такт𝑖 и на тех же
расстояниях от левого и правого бортов, что и в такт𝑖. Аналогично
доказательству леммы 1 получим:
𝑞(𝑖 + 1) = 𝜑(𝑎, 𝑞(𝑖)) = 𝜑(𝑎, 𝑞(𝑗)) = 𝑞(𝑗 + 1);
Для 𝑡 = 𝑗 − 𝑖, 𝜏 ≥ 𝑙получим
𝑞(𝜏 + 𝑑) = 𝑞(𝜏);
Таким образом, последовательность состояний периодична с предпериодом
𝑑0 = 𝑖 − 1и периодом 𝑑 = 𝑗 − 𝑖;
Рассмотримвыходной символ автомата в произвольный момент 𝜏 ≥ 𝑑0 .
𝑏(𝜏) = 𝜓(𝑎(𝜏), 𝑞(𝜏)) = 𝜓(𝑎(𝜏 + 𝑑), 𝑞(𝜏 + 𝑑)) = 𝑏(𝜏 + 𝑑);
Получаем, что последовательность выходных символов автомата
периодична с предпериодом 𝑑0 и периодом 𝑑, где 𝑑0 + 𝑑 ≤ 𝑙 ∙ 𝑛, 𝑠1 = 0.
Легко видеть, что горизонтальнаясоставляющая вектора перемещения
автомата за период выходной последовательности автомата 𝑠1 = 0
((𝑥(𝑡), 𝑦(𝑡)) + 𝑏̅𝑡 = (𝑥(𝑡 + 1), 𝑦(𝑡 + 1)))
Т. к. 𝒜(𝑅, 𝑉)имеет скорость 𝑉, для каждого 𝑖 = 1, … , 𝑑выполнено |𝑏̅𝑖 | ≤ 𝑉.
Следовательно, |𝑠⃗| = |𝑏̅1 + ⋯ + 𝑏̅𝑑 | ≤ 𝑉 ∙ 𝑑. Лемма доказана.
Лемма 3.Для любого автомата 𝒜, любого натурального 𝑙 и любой клетки
(𝑥, 𝑦)𝑙-полосы существует такая клетка -полосы (𝑥’, 𝑦’), что, стартуя из
клетки (𝑥, 𝑦), автомат 𝒜 никогда не увидит клетку (𝑥’, 𝑦’).
Доказательство.По лемме 2 автомат 𝒜 перемещается в 𝐿2 (𝑙) с
периодической последовательностью выходных символов. И 𝒜 будет
перемещаться в вертикальном направлении.Обозначим его вектор
перемещения как (0, 𝑠2 ), а период его выходной последовательности как
𝑑.Рассмотрим клетку (𝑥’, 𝑦’),где 𝑥’ = 𝑥, 𝑦’ = 𝑦 − 𝑑 ∙ 𝑉 − 1, при 𝑠 ≥ 0 и 𝑦’ =
𝑦 + 𝑑 ∙ 𝑉 + 1, при 𝑠 < 0.
Легко видеть, что за первые 𝑑тактов функционирования, автомат не
увидит клетку (𝑥’, 𝑦’),так как его перемещение за 𝑑тактов не превосходит 𝑑 ∙
𝑉, а расстояние между клетками(𝑥, 𝑦)и (𝑥’, 𝑦’)больше чем 𝑑 ∙ 𝑉 + 𝑅.
Через 𝑑тактов автомат переместится на 𝑠клеток, в сторону
противоположную направлению клетки (𝑥’, 𝑦’) и будет повторять то же
движение, которое осуществлялось в первые 𝑑тактов. Поэтому в момент
времени 𝑡 > 𝑑автомат также не увидит клетку (𝑥’, 𝑦’).Следовательно,
автомат 𝒜 никогда не увидит клетку (𝑥’, 𝑦’). Лемма доказана.
Основные теоремы о поимке
Лемма 4. Существует независимая система автоматов (𝒜1 , 𝒜2 ), такая
что для любого натурального 𝑙, (𝒜1 , 𝒜2 ) обходит -полосу.
Доказательство.Возьмем в качестве алфавита состояний каждого автомата
множество из двух состояний 𝑞1 и 𝑞2 . Зададим искомые автоматы 𝒜1 и 𝒜2
при помощи таблиц.При этом будем обозначать входные символы наших
автоматов следующим образом:
−1, если видит левый борт на расстоянии 1;
1, если видит правый борт на расстоянии 1;
𝑎={
0, если не видит борта или видит борт на расстоянии больше 1.
𝑎
0
−1
1
0
−1
1
Таблица 𝒜1
𝑞𝑖
𝜑
𝜓
𝑞1 𝑞1 (−1,0)
𝑞1 𝑞2 (0, −1)
𝑞1 𝑞2 (0, −1)
𝑞2 𝑞2
(1,0)
𝑞2 𝑞1 (0, −1)
𝑞2 𝑞1 (0, −1)
𝑎′
0
−1
1
0
−1
1
Таблица 𝒜2
𝑞𝑖 ′ 𝜑′
𝜓′
𝑞1 𝑞1
(1,0)
𝑞1 𝑞2
(0,1)
𝑞1 𝑞2
(0,1)
𝑞2 𝑞2 (−1,0)
𝑞2 𝑞1
(0,1)
𝑞2 𝑞1
(0,1)
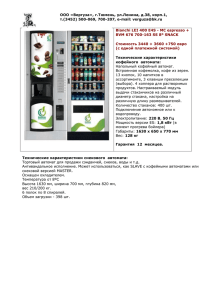
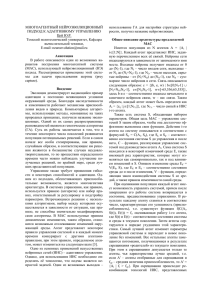
Предположим, данная независимая система
автоматов стартовала в клетке с координатами (𝑛, 𝑦).
Автомат 𝒜1 делает 𝑛 шагов влево – доходит до
левого борта, за 𝑛тактов. Затем, 𝒜1 делает один шаг
вниз вдоль левого борта ((0, −1)). Далее, 𝒜1 доходит
до правого борта за 𝑙 − 1 шагов. После 𝒜1 опять идет
вниз на шаг. Дальше, он делает те же 𝑙 − 1 шагов до
левого борта. И все повторяется.
Второй автомат 𝒜2 делает 𝑙 − 𝑛 шагов направо –
доходит до правого борта (𝑛 ≤ 𝑙), за 𝑙 − 𝑛 тактов.
Дальше,𝒜2 поднимается на шаг вверх –(0,1). Потом,
𝒜2 делает 𝑙 − 1 шагов до левого борта. Затем, снова
поднимается – (0,1). Далее, 𝒜2 доходит до правого
борта за те же 𝑙 − 1 шагов. Дальше все повторяется.
На рисункe показан примертакого движения, где 𝑙 = 4.
Легко видеть, что данная независимая система автоматов (𝒜1 , 𝒜2 ) обходит
𝑙-полосу.Лемма доказана.
Теорема 1. Не существует
неподвижную жертву.
автомата-хищника,
который
ловит
Доказательство.Пусть дан произвольный автомат-хищник 𝒜. По лемме 3 для
любой клетки (𝑥, 𝑦) из которой он стартует, существует клетка (𝑥 ′ , 𝑦′),
которую он никогда не увидит. Поместим неподвижную жертву в эту клетку.
По лемме 3 автомат-хищник её никогда не увидит. Теорема доказана.
Теорема 2.Существует независимая система автоматов (𝒜1 , 𝒜2 ),
которая для любого натурального 𝑙 ловит в -полосе неподвижный
автомат-жертву.
Доказательство.Рассмотрим в качестве системы (𝒜1 , 𝒜2 ), независимую
систему автоматов, построенную в доказательстве леммы 4.Пусть жертва
находится в клетке (𝑥, 𝑦), по лемме 4 независимая система автоматов
(𝒜1 , 𝒜2 ) обходит 𝑙-полосу. То есть существует автомат из (𝒜1 , 𝒜2 ) и
некоторый момент 𝑡, что один из автоматов окажется в клетке (𝑥, 𝑦).
Следовательно, жертва будет поймана. Теорема доказана.
Теорема 3.Для любой пары (𝑊, 𝑈), существует начальное расположение
(𝑊, 𝑈) в 𝐿2 (𝑙), при котором 𝑈 убежит от 𝑊.
Доказательство. Согласно лемме 2, автомат передвигается периодично в
𝐿2 (𝑙) (если другие автоматы не попадают в его зону обзора). Пусть 𝑊–за
период 𝑇имеет вектор перемещения 𝑆 = (𝑠1 , 𝑠2 ), а 𝑈–за период 𝑇′–𝑆′ =
(𝑠1′ , 𝑠2′ ). Тогда𝑇 ∙ 𝑇 ′ – общий период.За один такт времени хищник и жертва
могут приблизиться на 𝑉 + 𝑉 ′ . Так как полоса ограничена по горизонтали
𝑠1 = 𝑠1′ = 0. Рассмотрим следующие случаи передвижения автомата по
бесконечной полосе:
1. 𝑠2 = 0; 𝑠2′ = 0 .Рассмотрим ситуацию, когда 𝑊и 𝑈 стартуют на
расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от друга, где 𝑅 – зона
обзора, 𝑉и 𝑉′– скорость хищника и жертвы соответственно. Покажем,
что в этом случаи 𝑊 никогда не увидит 𝑈 и жертва 𝑈 не будет поймана
при любых начальных расположениях. За один такт хищник и жертва
могут приблизиться друг другу не больше чем на (𝑉 + 𝑉 ′ ). Тогда за
весь период они смогут приблизиться на(𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Отсюда
следует, что за общий период хищник и жертва, при соблюдении
начального расстояния друг от друга (1), не увидятся, следовательно и
в последующих периодах также не увидят друг друга.
2. 𝑠2 = 0; 𝑠2′ > 0. Зададим начальное расположение хищника и жертвы
так, что жертва находится выше хищника. Рассмотрим ситуацию, когда
𝑊и 𝑈стартуют на расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от
друга, где 𝑅 – зона обзора, 𝑉и 𝑉′– скорость хищника и жертвы
соответственно. Покажем, что в этом случаи 𝑊никогда не увидит 𝑈и
жертва 𝑈 не будет поймана. За один такт хищник и жертва могут
приблизиться друг другу не больше чем на (𝑉 + 𝑉 ′ ). Тогда за весь
период они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Тогда за первое
прохождение периода они смогут приблизиться не больше чем на (𝑉 +
𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Поскольку начальная клетка старта жертвы выше клетки
старта хищника, а за период 𝑇 ∙ 𝑇′ жертва уйдет еще выше, то отсюда
следует, что 𝑊и 𝑈 не увидятся и на последующих периодах.
3. 𝑠2 = 0; 𝑠2′ < 0.Зададим начальное расположение хищника и жертвы
так, что жертва находится ниже хищника. Рассмотрим ситуацию, когда
𝑊и 𝑈стартуют на расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от
друга, где 𝑅 – зона обзора, 𝑉и 𝑉′– скорость хищника и жертвы
соответственно. Покажем, что в этом случаи 𝑊никогда не увидит 𝑈и
жертва 𝑈 не будет поймана.(𝑉 + 𝑉 ′ )–на сколько могут приблизиться
хищник и жертва соответственно за один такт. Тогда за весь период
они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Тогда за первое
прохождение периода они смогут приблизиться не больше чем на (𝑉 +
𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Поскольку начальная клетка старта жертвы ниже клетки
старта хищника, а за период 𝑇 ∙ 𝑇′ жертва уйдет еще ниже, то отсюда
следует, что 𝑊и 𝑈 не увидятся и на последующих периодах.
4. 𝑠2 > 0; 𝑠2′ = 0.Зададим начальное расположение хищника и жертвы
так, что хищник находится выше жертвы. Рассмотрим ситуацию, когда
𝑊и 𝑈стартуют на расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от
друга, где 𝑅 – зона обзора, 𝑉и 𝑉′– скорость хищника и жертвы
соответственно. Покажем, что в этом случаи 𝑊никогда не увидит 𝑈и
жертва 𝑈 не будет поймана.(𝑉 + 𝑉 ′ )–на сколько могут приблизиться
хищник и жертва соответственно за один такт. Тогда за весь период
они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Тогда за первое
прохождение периода они смогут приблизиться не больше чем на (𝑉 +
𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Поскольку начальная клетка старта хищникавыше клетки
старта жертвы, а за период 𝑇 ∙ 𝑇′хищник уйдет еще выше, то отсюда
следует, что 𝑊и 𝑈 не увидятся и на последующих периодах.
5. 𝑠2 < 0; 𝑠2′ = 0.Зададим начальное расположение хищника и жертвы
так, что хищник находится ниже жертвы. Рассмотрим ситуацию, когда
𝑊и 𝑈стартуют на расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от
друга, где 𝑅 – зона обзора, 𝑉и 𝑉′– скорость хищника и жертвы
соответственно. Покажем, что в этом случаи 𝑊никогда не увидит 𝑈и
жертва 𝑈 не будет поймана.(𝑉 + 𝑉 ′ )–на сколько могут приблизиться
хищник и жертва соответственно за один такт. Тогда за весь период
они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Тогда за первое
прохождение периода они смогут приблизиться не больше чем на (𝑉 +
𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Поскольку начальная клетка старта хищника ниже клетки
старта жертвы, а за период 𝑇 ∙ 𝑇′хищник уйдет еще ниже, то отсюда
следует, что 𝑊и 𝑈 не увидятся и на последующих периодах.
6. 𝑠2 > 0; 𝑠2′ < 0.Зададим начальное расположение хищника и жертвы
так, что хищник находится выше жертвы. Рассмотрим ситуацию, когда
𝑊и 𝑈стартуют на расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от
друга, где 𝑅 – зона обзора, 𝑉и 𝑉′– скорость хищника и жертвы
соответственно. Покажем, что в этом случаи 𝑊никогда не увидит 𝑈и
жертва 𝑈 не будет поймана.(𝑉 + 𝑉 ′ )–на сколько могут приблизиться
хищник и жертва соответственно за один такт. Тогда за весь период
они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Тогда за первое
прохождение периода они смогут приблизиться не больше чем на (𝑉 +
𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Поскольку начальная клетка старта жертвы ниже клетки
старта хищника, а за период 𝑇 ∙ 𝑇′ жертва уйдет еще ниже, а хищник
еще выше, то отсюда следует, что 𝑊и 𝑈 не увидятся и на последующих
периодах.
7. 𝑠2 < 0; 𝑠2′ > 0.Зададим начальное расположение хищника и жертвы
так, что хищник находится ниже жертвы. Рассмотрим ситуацию, когда
𝑊и 𝑈стартуют на расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от
друга, где 𝑅 – зона обзора, 𝑉и 𝑉′– скорость хищника и жертвы
соответственно. Покажем, что в этом случаи 𝑊никогда не увидит 𝑈и
жертва 𝑈 не будет поймана.(𝑉 + 𝑉 ′ )–на сколько могут приблизиться
хищник и жертва соответственно за один такт. Тогда за весь период
они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Тогда за первое
прохождение периода они смогут приблизиться не больше чем на (𝑉 +
𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′). Поскольку начальная клетка старта жертвы выше клетки
старта хищника, а за период 𝑇 ∙ 𝑇′ жертва уйдет еще выше, а хищник
еще ниже, то отсюда следует, что 𝑊и 𝑈 не увидятся и на последующих
периодах.
8. 𝑠2 > 0; 𝑠2′ > 0.Рассмотрим ситуацию, когда 𝑊и 𝑈стартуют на
расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от друга, где 𝑅 – зона
обзора, 𝑉и 𝑉′– скорость хищника и жертвы соответственно. (𝑉 + 𝑉 ′ )–
на сколько могут приблизиться хищник и жертва соответственно за
один такт. Тогда за весь период они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙
(𝑇 ∙ 𝑇′).Если после первого периода 𝑠2 − 𝑠2′ ≥ 0, зададим начальное
расположение так что, хищник находится выше жертвы, иначе – ниже
(случай 𝑠2 − 𝑠2′ < 0). Тогда, в обоих случаях,𝑊и 𝑈 не увидятся и на
последующих периодах. Поскольку, они стартуют на расстоянии 𝑅 +
1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) и это расстояние либо сохранится либо будет
увеличиваться.
9. 𝑠2 < 0; 𝑠2′ < 0.Рассмотрим ситуацию, когда 𝑊и 𝑈стартуют на
расстоянии 𝑅 + 1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) (1) друг от друга, где 𝑅 – зона
обзора, 𝑉и 𝑉′– скорость хищника и жертвы соответственно. (𝑉 + 𝑉 ′ )–
на сколько могут приблизиться хищник и жертва соответственно за
один такт. Тогда за весь период они смогут приблизиться на (𝑉 + 𝑉 ′ ) ∙
(𝑇 ∙ 𝑇′). Если после первого периода 𝑠2 − 𝑠2′ ≥ 0, зададим начальное
расположение так что, хищник находится ниже жертвы, иначе – выше
(случай 𝑠2 − 𝑠2′ < 0). Тогда, в обоих случаях, 𝑊и 𝑈 не увидятся и на
последующих периодах. Поскольку, они стартуют на расстоянии 𝑅 +
1 + (𝑉 + 𝑉 ′ ) ∙ (𝑇 ∙ 𝑇′) и это расстояние либо сохранится либо будет
увеличиваться.
[
[
𝑇∙𝑉
2
] + 𝑇0 ∙ 𝑉, [
𝑇1 ∙𝑉
2
] + 𝑇0′ ∙ 𝑉 [
𝑇1 ∙ 𝑠2 , 𝑇2 ∙ 𝑠1
𝑇∙𝑉
2
] + 𝑇0 ∙ 𝑉 + 𝑅 + 𝑑 + 1.
𝑇2 ∙𝑉
2
] + 𝑇0′′ ∙ 𝑉 + 𝑅 + 1.
Список использованной литературы:
[1] В. Б. Кудрявцев, С. В. Алешин, А. С. Подколзин “Введение в теорию
автоматов”, Москва, Наука, 1985, стр. 8-31.
Н. Ю. Волков [2] “Об автоматной модели преследования”, [3] “ Об
автоматной модели преследования в базовых плоских областях”, Дискретная
математика.