1 Многоволновое лидарное зондирование аэрозоля атмосферы
реклама

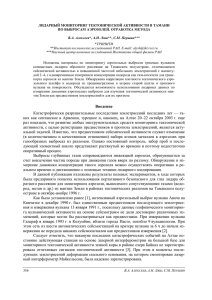
1 Многоволновое лидарное зондирование аэрозоля атмосферы 1.1 Математический аппарат, методика и алгоритм определения числовой и массовой концентрации аэрозоля по результатам многоволнового лидарного зондирования атмосферы 1.1.1 Теоретическая основа многоволнового и Раманвского рассеяния света аэрозолем атмосферы Лидарные исследования многоволнового и Рамановского рассеяния аэрозоля в настоящее время широко используются в изучении турбулентной Исследование вертикального распределения концентрации и диффузии. микрофизических параметров аэрозоля имеет важное значение для решения проблем радиационного баланса атмосферы, физики и химии аэрозоля, а также процессов переноса загрязняющих веществ в атмосфере. Лидарное зондирование может дать ценную информацию в дополнении к контактным измерениям, так как позволяет проводить длительные непрерывные измерения с хорошим многоволновых пространственным лидарных измерений и временным содержат разрешением. информацию не Данные только о пространственном распределении аэрозоля, но также и о его микрофизических параметрах, таких как функция распределения аэрозольных частиц по размерам и показатель преломления вещества аэрозоля. Известно, что включение в набор исходных данных вместе с коэффициентами обратного рассеяния еще и коэффициентов ослабления в существенной степени стабилизирует получаемые решения [13]. Коэффициенты ослабления могут быть получены в самих же лидарных измерениях при приеме сигналов комбинационного рассеяния (КР) на одном из основных атмосферных газов, например, на атмосферном азоте. В последнее время развитие техники лидарного зондирования привело к появлению комбинированных лидаров, сочетающих прием сигналов КР с многоволновым зондированием [14-17]. Среди них наибольший интерес представляют сравнительно простые системы, построенные на основе Nd: YAG лазеров c преобразованием частоты во вторую и третью гармоники (длины волн 1064, 532 и 355 нм) [16,17]. Здесь возможны 5-ти волновые измерения с использованием двух сигналов КР на атмосферном азоте (387 и 607 нм), либо 4-х волновые измерения с использованием только одного канала КР, например, на 387 нм. Развитие экспериментальной техники зондирования, в свою очередь, стимулировало появление новых подходов к интерпретации данных зондирования, в которых предлагались те или иные способы регуляризации решений, учитывающих специфику данной задачи [18-20]. Ни один из развиваемых подходов не использовал в явном виде априорную информацию о функции распределения аэрозольных частиц по размерам, за исключением общих соображений о ее гладкости. Большинство численных экспериментов проведено с использованием одномодальных исходных функций распределения, и для них получено вполне удовлетворительное качество восстановления аэрозольных параметров. В то же время для двухмодальных распределений результаты не столь убедительны. В [19,21] численные эксперименты для двухмодальных распределений приведены только с использованием набора из 8-ми длин волн зондирования, причем в [19] для восстановления использовались незашумленные исходные сигналы обратного рассеяния. Между тем, хорошо известно, что реальные аэрозольные распределения имеют как минимум две оптически активные фракции: субмикронную, включающую, в основном, частицы фотохимического происхождения, и более крупнодисперсную, которую образуют частицы почвенного происхождения, крупные солевые частицы и т.д. В отличие от [18-20] для получения решений, отвечающих реально наблюдаемым распределениям, в данной работе предлагается в явном виде учитывать априорную информацию о функции распределения атмосферного аэрозоля. Априорная функция распределения выбирается в виде гистограммы, задаваемой в параметрическом виде. Ряд параметров находится на основе статистического анализа некоторого представительного набора экспериментальных функций распределения, полученных путем контактных измерений, остальные параметры являются свободными. Используется двухступенчатая схема восстановления функции распределения [22]: на первом этапе подбираются свободные параметры заданной априорной функции распределения, а на втором – находятся поправки к ней с применением регуляризации решения по Тихонову. Для исследования возможностей рассматриваемой схемы обращения проведен обширный цикл численного моделирования. При этом в численных экспериментах в качестве исходных данных берутся не коэффициенты ослабления и обратного рассеяния как в [18-20], а лидарные сигналы, после чего проводится совместное решение системы лидарных уравнений и задачи обращения оптических данных зондирования итерационным методом. В отличие от ранее разрабатывавшихся итерационных схем решения лидарных уравнений [23], в данной работе при проведении итераций используются нелинейные интегральные соотношения, полученные с помощью известных преобразований Фернальда [24]. Это позволяет различным образом выбирать пространственное разрешение, в том числе проводить восстановление параметров для аэрозольных слоев с оптической плотностью, приближающейся к единице. В этом случае ограничением является лишь возникновение эффектов многократного рассеяния, влияние которых можно оценить заранее. Распространяясь по атмосферной трассе зондирования, лазерный импульс испытывает поглощение и рассеивание на молекулах и аэрозолях атмосферы. Часть излучения, рассеянная атмосферой назад в направлении лидарной системы, может быть собрана и сфокусирована с помощью приемной аппаратуры на фотодетектор, который преобразует ее в электрический сигнал, пропорциональный падающему световому потоку. При этом расстояние до любого рассеивающего объема на трассе зондирования однозначно определяется по значению временного интервала с момента посылки лазерного импульса, поскольку свет распространяется с известной скоростью. А интенсивность принятого сигнала в каждый конкретный момент времени зависит как от свойств конкретного рассеивающего объема атмосферы, так и от характеристик всей атмосферной трассы зондирования на двойном пути от лидара до рассеивающего объема и обратно. Лидарное уравнение, связывающее измеряемые сигналы на длине волны λk (k = 1, … , Nλ) с оптическими параметрами атмосферы имеет следующий вид: z F( k , z) ( a ( k , z) m ( k , z)) exp 2 (( a ( k , z ) m ( k , z)) dz 0 (1) где F(λk, z) = A(λk) P(λk, z) z2; A(λk) – аппаратная константа; z – расстояние вдоль трассы лидара; P(λ, z) – мощность сигнала лидара; β a (λ, z) и β m (λ, z) - коэффициенты аэрозольного и молекулярного обратного рассеяния; σ a (λ, z) и σ m (λ, z) – коэффициенты ослабления для аэрозольного и молекулярного рассеяния; . Оптические коэффициенты обратного называемым лидарным отношением: β a (λ, z) = θ a (λ, z)σ a(λ, z), β m (λ, z) = θ mσ m (λ, z), рассеяния и ослабления связаны так где θ a (λ, z) и θ m – лидарные отношения для аэрозольного и молекулярного типов рассеяния. Для целей этой работы удобнее представить лидарное уравнение в следующем виде: z F( R , z1 ) N(z1 ) 2 ln ln ( a (1 , z) a ( R , z) m (1 , z) m ( R , z))dz , F( R , z 2 ) N(z 2 ) z (2) 1 где σ a (λ1, z) и σ m (λ1, z) – аэрозольный и Релеевский коэффициенты ослабления на лазерной длине волны λ1, что согласуется с уходом длины волны при Рамановском рассеянии; σ a(λR, z) и σ m (λR, z) – то же для перемещенной Рамановской длины волны λR . Рассеяние оптических волн в атмосфере существенно зависит от пространственных и временных вариаций макроскопических частиц вещества, взвешенных в воздухе. Теория рассеяния электромагнитных волн аэрозольными частицами в приближении диэлектрических сфер (теория Ми) подробно изложена в монографиях [5,6]. На ее основе можно получить выражения величин β a и σ a для аэрозольных коэффициентов обратного рассеяния и ослабления, интегрально связанных с функцией рассеяния аэрозоля f (r): a ( , z ) rmax r 2 K bsc (, r, z) f (r, z) dr , rmin a (, z) rmax r 2 K ext (, r, z) f (r, z) dr (3) rmin где K bsc (λ, r, z) и K ext (λ, r, z) – оптические факторы обратного рассеяния и ослабления. Из (2) может быть получена только сумма коэффициентов ослабления для исходящей лазерной и Рамановской длин волн λ1 и λR. Таким образом, для Рамановского сигнала будет простое уравнение: a (1 , z) a ( R , z) rmax r rmin 2 (K ext (1 , r, z) K ext ( R , r, z))f (r, z) dr (3') Задача обработки многоволнового и Рамановского лидарных измерений состоит в следующем: вывести параметры функции распределения f (r, z) из лидарных сигналов F(λ k , z), (k = 1, … , Nλ) и F(λR, z) с использованием базовых соотношений (1),(2) и (3),( 3'). Задача решается с помощью совместных решений лидарных уравнений (1),(2), связывающих сигналы и оптические характеристики аэрозоля и системы линейных интегральных уравнений (3), (3'), связывающих оптические характеристики аэрозоля с функцией распределения аэрозольных частиц по размерам. Плотность атмосферы как функции расстояния вдоль трассы зондирования априорно считается известной, что позволяет вычислить молекулярные оптические коэффициенты β m (z) и σ m (z). Такой же априорной информацией считается предположение о сферичности частиц аэрозоля. В этом случае факторы K bsc (λ, r, z) и K ext (λ, r, z) могут быть рассчитаны в соответствии с теорией Mи, если известен вертикальный профиль общего показателя преломления аэрозольного вещества m(h). Для корректной оценки пропускания лазерного излучения атмосферой необходимо иметь информацию о физических и оптических моделях атмосферы. Наиболее полной и удобной для решения задач дистанционного зондирования является физическая модель атмосферы [4], разработанная в Институте оптики атмосферы. В ней, кроме профилей температуры, давления, концентрации H2O и O3 для различных климатических зон, содержится информация о высотном распределении CO2, CO, CH4, N2O, NO, NO2, а также сведения об их стандартных отклонениях для различных высот. Использование модели [4] является, по-видимому, наиболее перспективным для решения задач численного моделирования дистанционного лазерного зондирования, оценки пропускания атмосферы, обратных задач оптики атмосферы и др., когда требуются знания о распределении температуры и газовых компонент атмосферы. Для количественной оценки пропускания атмосферы для лазерных источников необходимо иметь данные о коэффициентах аэрозольного ослабления, молекулярного рассеяния и резонансного молекулярного поглощения. Наиболее широко используемой является оптическая модель атмосферы Мак-Клатчи [7], содержащая сведения об аэрозольных и молекулярных коэффициентах рассеяния и поглощения для достаточно обширного набора длин волн лазерного излучения от 0.3371 до 337 мкм и пяти сезонных и широтных зон: тропической, летней и зимней среднеширотной, летней и зимней арктической. Дальнейшим усовершенствованием модели Мак-Клатчи является модель [8], созданная для расчетов пропускания атмосферы в диапазоне длин волн от 0.2 до 40 мкм, в интервале высот от 0 до 100 км. Эта модель охватывает большое количество атмосферных ситуаций: в ней даны сведения для высот 50, 23, 10, 5, 2 км и значений относительной влажности 0, 70, 80, 99%, использованы континентальная, морская, тропосферная и городская модели аэрозоля. Распределение частиц по размерам соответствует суперпозиции двух логнормальных распределений, представляющих субмикронную фракцию фотохимического происхождения и мелкодисперсную фракцию пылевого происхождения (см. ниже выбор априорной функции g (r, γ)). В отличие от модели Мак-Клатчи, модель, разработанная в Институте оптики атмосферы [10], специально адресована для целей моделирования лидарных измерений и поэтому имеет менее универсальный характер. В ней в качестве исходного материала выбраны результаты многочисленных экспериментов по определению микрофизических характеристик аэрозоля для длин волн 0.3…15 мкм и интервала высот от 0 до 30 км. Соответствующие данные затем усреднялись, и на базе средних микрофизических величин рассчитывались оптические характеристики. Преимуществом модели [10] является то, что она содержит данные о лидарном отношении, определяющем сигнал обратного рассеяния, недостатком – все данные приведены только для континентального аэрозоля. Этот недостаток устранен в следующем варианте оптической модели аэрозоля [11], где приведены данные уже для нескольких типов аэрозолей (фоновой, городской, морской и т.д.). Эта модель достаточно удобна для численных оценок лидарного зондирования атмосферы. Из имеющихся моделей можно выбрать модели аэрозолей с показателем преломления, согласующимся с размерами частиц, и в этом случае m = m(h, r). В дальнейшем рассматривается два различных подхода в применении моделей аэрозоля. В первом случае модель аэрозоля может быть известна заранее и зафиксирована. Во втором характеристики аэрозоля вычисляются при помощи уравнений (1),(2)-(3),( 3') и модель аэрозоля выбирается из различных возможных моделей.. Поскольку экспериментальная информация ограничена, берется грубая оценка пространственного разрешения f (r) для областей, где это разрешение достаточно стабильно. Таким образом, трасса лидара делится на несколько интервалов (z j , z j+1 ), в основном от сотен метров до километра в длину. Внутри интервала показатель преломления m(h) берется постоянным, и параметры функции распределения представляются как f (r, z) = C(z) f (r). Это означает, что тип спектра частиц аэрозоля f (r) сам не меняется внутри интервала, но концентрация частиц может меняться. Для получения более точного решения разработан численный алгоритм.. Алгоритм состоит из двух частей, первая из которых предварительная. Она включает определение калибровочной точки, для которой коэффициент обратного рассеяния предполагается известным по выбранной модели аэрозоля. Затем для каждой длины волны лазера решается лидарное уравнение. Вид лидарного отношения, необходимый для этих вычислений, выбирается заранее на базе какой-либо оптической модели атмосферы. Это позволяет получить оценку средней величины коэффициентов обратного рассеяния для системы выбранных интервалов (z j , z j+1 ). На второй стадии для тех интервалов, где отношения аэрозольных к Релеевским коэффициентам обратного рассеяния больше, чем некоторая критическая величина, определение f (r) осуществляется с помощью специального итерационного алгоритма, детально разобранного ниже. На каждом шаге итерации обратная задача (2) решается совместно с решением лидарного уравнения для каждого интервала. Начальный набор данных – это набор средних оптических коэффициентов обратного рассеяния <β a (λ, z)> (k) на длинах волн лазера и средних коэффициентов ослабления <σ a (λ1 , z) + σ a (λR , z) > на Рамановской длине волны, определенной для интервала расстояния (z j , z j+1 ) и для k-го шага повторения. Сейчас остановимся подробнее на проблеме получения f (r, z) из уравнений (3), (3'). Для числового решения f (r) представляется в виде гистограммы f(r i ), (i = 1, … , n), и интегральные уравнения (3), (3') трансформируются в алгебраическую форму: n ak Bki f i (4) i 1 n ak C kif i (4) i 1 n a1 aR (C1i C Ri )f i i 1 где индекс k присваивается какой-либо длине волны из набора N λ длин волн, (4'') n – число отдельных единиц гистограммы, представляющей распределение размеров функции рассеяния f (r). Матрицы величин B ki , C ki и C kR предварительно вычисляются по формуле из теории Ми для выбранного типа модели аэрозоля. В свою очередь, модель аэрозоля определяется набором показателей преломления как функций радиуса частиц m(r). По расчетам по формулам Ми функция f (r) определяется в промежуточной точке интервалов между (r i-1 + r i ) / 2 и (r i + r i +1) / 2 по параболе, проходящей через точки (f i -1, r i -1 ), (f i , r i ), (f i +1, r i +1). Значение ri выбирается внутри интервала вычисленных значений радиусов (0.037 μm < r i < 2.2 μm), который обычно содержит большую часть частиц тропосферного аэрозоля. Для стратосферного аэрозоля или для аэрозоля от искусственных источников область функций f (r i ) может быть выбрана значительно уже. Для показа численных вычислений нужно изобразить численные гистограммы в n точках, не менее, чем n = 8, при вычислении оптических коэффициентов для размеров частиц наблюдаемого тропосферного аэрозоля. Иными словами, результаты вычислений должны строго соответствовать выбранной функции f (r ) представленной точками гистограммы. Вообще, в этой работе взято n = 8 колонок и точки r i выбраны равноценно по логарифмической шкале. Для стратосферного аэрозоля с более узким распределением размеров аэрозольных частиц число колонок гистограммы n может быть меньше, чем n = 8. Для многоволнового лидарного зондирования используется, как правило, только несколько (от 3 до 7) лазерных длин волн. Таким образом, рассматриваемая проблема ограничена и широкая вариация решений f (r, z) может происходить в определенных границах, определяемых ошибками лидарных измерений. Поэтому необходимо использовать некоторую априорную информацию для получения надежного решения. Прежде всего, решение выбирается вблизи некоторой априорной аналитической функции g (r, γ), зависящей от параметров . Число параметров берется минимальным, один или два. Аналитическая форма функции g (r, γ) и область допустимых значений γ определяется на базе известных экспериментальных данных по размерам частиц аэрозолей из функции распределения в атмосфере. Таким образом, в дискретной форме f (r, z) представляется в следующем виде: f i (z) = g (r i , (z)) + s i (z), (5) где s(z) – дополнение к априорной функции, значительно малое по сравнению g (r i , γ (z)) . Представление (5) позволяет реализовать процедуру регуляризации решений для f(r), (смотрите ниже) приближающиеся к реальным значениям спектра. При этом априорная функция g (r, γ (z)) определяется аналитическим выражением. Используются два различных типа априорных функций. Для тропосферного аэрозоля используется функция трех параметров, которая состоит из двух отдельных частей. Одна часть представляет совокупную аэрозольную фракцию фотохимического происхождения, а другая часть представляет пылеподобную фракцию, в основном состоящую из частиц земли для континентального аэрозоля и частиц соли для морского аэрозоля. Аналитическое представление для первой части представляется в виде: ln g(ri , j ) 3 (c i b i 1 )(ln ri ln r5 ), i=1-5. (6) Где коэффициенты c3 , c5 , b5 , b3 - соответственно: c3 = c5 = b5 = 0, b3 = 1. Таким образом, свободные параметры γ3 = ln g (r5 , γi ), γ1=ν35 = (ln g (r3 , γi ) - ln g (r5 , γi ))/(ln r3 – ln r5). Кроме того, из (6) следует, что ν15 , ν25 и ν45 связаны с ν35 уравнением линейной регрессии (обращения): ν i5 = ci + bi ν35 (I = 1, 2, 4). (7´) Следовательно, коэффициенты bi , ci (I = 1, 2, 4) могут быть определены из регрессивного анализа эмпирической функции распределения аэрозоля. Подобным же образом, другая часть функции представляется в виде: ln g(ri , j ) 3 (c i b i 2 )(ln ri ln r5 ), i=6-8, (7´´) где c7 = 0, b7 = 1 и γ2 = ν75 = (ln g (r7 , γi ) - ln g (r5 , γi ))/(ln r7 – ln r5). Коэффициенты bi , ci (I =6, 8) определяются также из экспериментальных данных. Из вышесказанного следует, что возможны два вида алгоритмов: с фиксируемой и с изменяемой моделью аэрозоля. Рассмотрим первую модель. На первом этапе выполнения решений (3), (3') определяются оптимальные параметры γ априорной функции g (r, ). Это проблема двухили трехмерной вынужденной минимизации показанными выше, где T() представляется в виде: функции T() с ограничениями, N n n k 1 i 1 i 1 T() ( ak Bki g (ri , )) 2 v k 2 ( a1 aR (C1i C Ri ) g (ri , )) 2 v R 2 , (8) где v k, v R – весовые коэффициенты, величины которых обратно пропорциональны экспериментальным ошибкам многоволновых сигналов на длинах волн k и для их Рамановских компонентов соответственно. Второй этап решений (3), (3') – находят функцию s(r i ) из системы алгебраических уравнений для коэффициентов обратного рассеяния β ak и коэффициентов ослабления σ a1 (z) + σ aR (z): n ak B ki s i , (9) i 1 n a1 aR (C1i C Ri )s i , (9') i 1 где n ak ak B ki g i ( 0 ) , i 1 n a1 aR a1 aR (C1i C Ri ) g i ( 0 ) i 1 и 0 определяются на первом этапе. Для получения устойчивого решения для s (r i ) должны быть проведены некоторые регуляризационные процедуры. В предлагаемой методике регуляризационная процедура базируется на представлении о минимизации и «гладкости» функции s (r i ). Это означает, что имеет минимум не только функция s (r i ), но и ее первая s(r i ) и вторая s(r i ) производные. Кроме того, все решения f (r i ) должны быть положительными. Таким образом, формула регуляризации представляется в следующем виде: 2 2 n n 2 2 T (s i ) ak B ki s i v k *a1 *aR (C1i C Ri ) s i v R k 1 i 1 i 1 N n a 0 s i 2 w i 2 a 1 (s i s i1 ) 2 a 2 (s i1 2 s i s i1 ) 2 Q (s i g (ri , 0 )) . i 1 (10) В выражении (10) величина β*ak и (σ*a1 (z) + σ*aR (z)) находится на первом этапе алгоритма. Величины s 0 и s n+1 в выражении (10) устанавливаются равными 0. Компоненты v k и w i – весовые коэффициенты. Коэффициенты a 0 , a 1 и a 2 – масштабные факторы. Параметр - регуляризационный параметр. По мере минимизации уравнения (9) величина остается постоянной. Первые два слагаемых (10) представляют квадраты разности между экспериментальной и теоретической величинами коэффициентов обратного рассеяния (ослабления). Величина этого выражения после окончания минимизации представляется как остаток δ. Третий и четвертый слагаемые дают меру нормальности и «гладкости» функции s i . Параметр регуляризации определяет отношения между двумя первыми слагаемыми, показанными выше в (10). Функционал Q (s i +g(r i , γ 0 )) используется для предотвращения появления отрицательной компоненты s i в течение процесса минимизации и представляется в виде: n Q (s i g (ri , 0 )) s i g (ri , 0 ) 2 i , (11) i 1 где θ – небольшая положительная константа, ζ i = 0 при s i > θ и ζ i = 1 при s i = θ, μ - параметр, который специально связывает функционал Q (s i +g(r i , γ 0 )) с общим функционалом Tα (s i ). Требуемая функция s i определяется минимизацией функционала Tα (s i ). Проблема состоит в выборе величины параметра регуляризации α. Путем вариации α могут быть получены различные значения f (r) = s (r) + g (r, ). При небольшой величине α функция f (r) может сильно отличаться от априорной функции и быть не гладкой, но хорошо согласовываться с экспериментальной величиной β ak и (σ a1 (z) + σ aR (z)) (разность δ небольшая). Наоборот, при большой α функция f (r) – гладкая и согласуется с априорной функцией, но разность, как правило, велика. Минимизация функционала T (s i ) при фиксированном параметре α осуществляется прямой минимизацией (9) с использованием какого-либо метода вынужденной нелинейной оптимизации. Нелинейность связана с присутствием функционала Q (s i +g(r i , γ 0 )), не являющегося квадратной функцией s i по всей области варьирования s i от -∞ до +∞. В целях получения более точного решения, которое может быть скоординировано с известными экспериментальными данными, введем критерий гладкости функции f (r). Степень гладкости G для функции f (r) определяется как: G = (max γ i ) , где γ i = max (f i + 1 / f i , f i / f i + 1), i = 2, 3, … , n - 2. Таким образом, предельные отношения f 2 / f 1 и f n / f n -1 исключаются из рассмотрения. Уменьшение величины G по отношению к максимальной приводит к более гладким функциям. Критерий выбора достаточно прост: удовлетворять интуитивной идее гладкости функции и быть сравнимым с экспериментальными данными f (r). Перед началом минимизации функционала (10) должны быть определены гладкость G и разность δ: G = G 0 , δ = δ 0 . Затем следует серия минимизаций за счет изменения величины α с заданным шагом. Из полученной последовательности решений учитываются только те решения, для которых G G 0 . После этого среди них выбираются решения, для которых величина разности δ наиболее близка к δ 0 . Путем вариации параметров G и δ можно получить решения, удовлетворяющие различным критериям. Точные, но не гладкие решения могут быть получены путем увеличения G и уменьшения δ. С другой стороны, уменьшая G и увеличивая δ можно получить более гладкие, но менее согласующиеся с экспериментальными данными решения. Рассмотрим более сложный вариант алгоритма регуляризации, где модель аэрозоля может меняться вместе со спектром аэрозоля. В этом случае число моделей считается как априорно возможным. По существу, набор матриц B ki , C ki и C kR для каждой модели выбирается предварительно. Выбор между моделями может быть сделан по критерию минимума среди разностей δ полученных при минимизации функционала (10) с фиксированной величиной параметра α. Выбирается следующая стратегия алгоритма решения. Вначале берется большая величина α = α 0 и выбирается оптимальная модель. Затем алгоритм начинает работу, используя фиксированную выбранную модель аэрозоля. После окончания берется конечная величина α = α f и процесс выбора оптимальной модели повторяется для α = α f . Если отобранная модель такая же, как предыдущая, алгоритм останавливает работу. 1.1.2 Алгоритм вычислений функции распределения частиц аэрозоля по размерам, а также счетной и массовой концентрации аэрозоля Перед началом процесса происходит калибровка сигнала лидара по профилю коэффициентов обратного рассеяния, полученных в результате зондирования (или сравнение сигналов лидара по коэффициентам обратного рассеяния). Сравнение сигналов лидара происходит с использованием выбранной точки, в которой коэффициенты обратного рассеяния предполагаются известными. Затем решение лидарного уравнения последовательно переносится от выбранной точки на другие части трассы лидара. Этот путь решения надежен кроме тех интервалов лидарной трассы, где проблема обратного рассеяния не может быть решена из-за небольшой величины сигналов обратного рассеяния или большой величины ошибок при решении лидарного уравнения. В этом случае в таких частях лидарной трассы используется другой алгоритм решения лидарного уравнения. Таким образом, программа обработки данных включает предварительную стадию. 1.1.2.1 Процедура калибровки сигналов лидара 1-й тип калибровки (прямая калибровка) Выбор калибровочной точки важен для целей обработки лидарных данных.. Эта точка может быть взята на различных высотах в различных точках полученного в результате зондирования сигнала обратного рассеяния в атмосфере (см. рис. I.1.). Обычно опорная точка выбирается на большой высоте, где коэффициенты обратного рассеяния аэрозоля малы по сравнению с коэффициентами Релеевского рассеяния, поэтому они либо полагаются равными 0, либо берутся согласно некоторой модели атмосферного аэрозоля. В этом случае β(Z r ) = β m (Z r ). Величина β m (Z r ) вычисляется из модели атмосферного аэрозоля. На участке стратосферы калибровочная точка выбирается выше уровня аэрозоля стратосферы. По достижении верхней тропосферы калибровочная точка выбирается под тропопаузой, где обычно наблюдается малая величина содержания аэрозоля. Для нижней тропосферной стадии калибровочная точка может быть выбрана выше границы перемешивания. Высота, км 1.Уровень калибровки Zg 30 Z0 Z1 Z2 Определение коэффициентов 2. обратного рассеяния 3. Определение размеров частиц 20 10 Коэффициент обратного рассеяния i -Возможные калибровочные точки Рисунок 1.1. Выбор калибровочной точки. 2-й тип калибровки Калибровочная процедура 2-го типа используется, когда в каком-либо случае сигнал от точки z g не может быть обнаружен, например, когда ниже находятся облака. Другая ситуация, когда 1-й тип калибровки невозможен, может иметь место, когда большое содержание аэрозоля наблюдается на всех высотах. В таких ситуациях калибровка может быть выполнена на базе предыдущих калибровок по 1-му типу. В данной ситуации необходимо провести измерение прозрачности атмосферы T(0, z), где z T(0, z) exp (( a (, z ) m (, z )) dz . 0 (12) Лидарные измерения прозрачности проводятся с помощью метода лидарного зондирования по наклонной трассе. Следующие уравнения иллюстрируют процедуру калибровки. Для более ранней калибровки по 1-му типу в точке z g1 F(z g1) = β m (z g1) T2(0, z g1) . (13) Для последующей калибровки в точке z 0, выбранной в качестве опорной, F N (z g) = β(z g ) T2(0, z g ) . (14) Из (13), (14) следует β(z g ) = F N (z g ) β m (z g1 ) T2(0, z g1 ) / (F (z g1 ) T2(0, z g )) . (15) Это означает, что опорная величина β(z g ) может быть получена при помощи данных предварительной калибровки по 1-му типу с использованием данных о прозрачности атмосферы в момент обеих калибровочных процедур. 3-й тип калибровки Известно, что грубое приближение величины T2(0, z g ) может быть взято из оптической модели атмосферы. Такой путь калибровки может использоваться только как дополнительный по отношению к методу лидарного зондирования. 1.1.2.2 Предварительный этап математической обработки многоволновых лидарных сигналов На этом этапе обработка сигнала выполняется на базе выбранной оптической модели атмосферы. Вычисление параметров функции распределения не производится. Априорная информация используется в лидарном отношении для профилей высоты аэрозольного рассеяния θ a (z) = β m (z Cos ) / σ m (z Cos ), где угол трассы зондирования над горизонтом. Величина β m (h) и σ m (h) (где h –это высота) на длине волны зондирования берется из оптической модели атмосферы. Кроме того, априорно используется профиль коэффициента молекулярного рассеяния σ m (z). Решение лидарного уравнения β m (z) может быть представлено в виде: a ( z) m ( z) m ( z g ) F(z) 2 T m ( z, z g ) T 2 a ( z , z g ) , F(z g ) (16) где zg T m (z, z g ) exp 2 m (z ) dz , z 2 zg exp 2 a (z) 1 m m (z) dz z , T 2 a ( z, z g ) z g 1 2 F (z) a (z) 1 dz z F ( z) F(z) (z g ) F(z g ) zg exp 2 m (z ) 1 a (z ) 1 m dz . z Из (15) можно видеть, что решение уравнения (16) позволяет определять аэрозольное ослабление через величину фактора T2a (z, z g ). Заметим, что решение (16) – это строгое решение лидарного уравнения. Оценка относительной ошибки β a (z) выполняется и записывается в аналитическом виде a 1 a (1 2 2 2 3 2 ) 2 4 2 , (17) где 1 = K 1 F ( F - относительная ошибка для отношения лидарных сигналов F(z) / F(z g )), 2 = K 2 β (zg) ( β (zg) - относительная ошибка для β(z g )), 3 = K 3 θa ( θa - относительная ошибка для θ a (z)), 4 = K 4 σm ( σm – относительная ошибка для молекулярного коэффициента обратного рассеяния). Аналитическое представление коэффициентов пропорциональности K 1 – K 4 не представлено здесь из-за их громоздкости. Значения этих коэффициентов численно находятся во время обработки данных и входят в результирующее значение βa. 1.1.2.3 Решение обратной задачи восстановления функции распределения частиц аэрозоля по размерам Перед началом вычислений должна быть определена система интервалов внутри граничных точек Z j (j = 1, … , N int ), где N int - 1 – номера интервалов восстановления параметров функции распределения. Все точки берутся по одну сторону от z g , тогда Zj < zg. Предварительный этап вычислений дает коэффициент обратного рассеяния аэрозоля β a (, z). Затем может быть найдена средняя величина <β a (, z)> для какого-либо интервала (Z j -1, Z j ). Кроме того, по результатам решения (2) определяется средняя величина коэффициентов ослабления для Рамановского сигнала <σ a(R, z) + σ a(1, z)> на интервале (z 1 , z 2 ): z F( R , z 2 ) N( z 2 ) 2 a ( R , z) a (1 , z) z ln ln ( m (1 , z) m ( R , z))dz F( R , z1 ) N(z1 ) z 1 1 (18) Алгоритм восстановления вступает в действие, если отношение <β a (, z)> / <β m (, z)> для всех длин волн зондирования больше, чем критерий C cr . Таким образом, критерий C cr применяется для серии интервалов (Z j -1 , Z j ), где j = N int , N int - 1, ... , 2,. удовлетворительный, Если для какого-либо интервала (Z j 0 -1, Z j 0 ) критерий стартует алгоритм восстановления. Для рассматриваемой последовательности можно ввести обозначения Z 0 Z j 0 -1, Z 1 Z j 0 , и <β a (, z )> для последовательности набора оптических параметров <β a (, z )> (k) и (k) , <σ a(R, z) + σ a(1, z)>. Алгоритм восстановления – итерационная процедура, которая состоит из следующих шагов каждой итерации: a(k) a f(r) процедура восстановления вычисление по теории Ми a(k+1) решение k+1 повторения Для первой итерации <β a (, z)>(1) вычисляется из уравнения z1 a (z1 z 0 ) 1 F(z) exp 2 m (z) dz m (z1 ) m , (19) z0 где z m (z) m (z ) dz , z0 F(z) (z g ) F(z) F(z g ) T 2 (z g , z 0 ) . T(z g , z 0 ) – прозрачность атмосферы вдоль участка (z g , z 0 ), вычисленная на предварительном этапе процесса. Уравнение (19) - приближение, которое получается из (1), когда σ a (z) в экспоненциальном выражении пренебрежимо мало. Для следующей итерации <β a (, z)>(k) вычисляется таким образом z1 a (z1 z 0 ) 1 a (z) dz , z0 решение (16) используется в определении β a (z): F(z) a ( z ) m ( z ) m 1 2 z0 . (20) F(z ) a (z ) dz z где z0 F(z) exp 2 m (z ) (1 a (z ) 1 m ) dz . F(z g ) T 2 (z g , z 0 ) z F(z) (z g ) Отношение (20) – одна из форм представления решения (16), которое использует величину T2(z g , z 0 ). После вычисления <β a (, z)> начинается процедура восстановления, описанная в разделе 1. Вводятся оптические коэффициенты обратного рассеяния для средних величин <β a (, z)>(k) для всех длин волн лазерного зондирования и коэффициент ослабления <σ a(R, z) + σ a(1, z)>, полученный из Рамановского сигнала. Предполагается, что коэффициент ослабления одинаков для всех шагов процедуры итерации.. В результате получается размер функции распределения аэрозоля f (r)(k) для итерации номер k. Затем выполняется вычисление по теории Ми уравнений (3), (3) с функцией f (r)(k) и определяются лидарные отношения на длинах волн зондирования θ a (λ)(k). После этого переход к следующей итерации номер k+1 делается при помощи решения (20) для получения <β a (, z)>(k+1). Процедура итерации останавливается, когда значение квадрата относительной разности величин β a (, z) для двух последующих итераций становится меньше, чем γ it, которая определяется входными параметрами процедуры. При переходе к следующему интервалу прозрачность T(z g , z j 0 +1 ) вычисляется согласно уравнению: z j 01 T(z g , z j 01 ) T(z g , z j 0 ) exp a (z) / a dz . zj0 (21) 1.1.2.4 Представление результатов Для каждого интервала (z i , z i+1) представляется функция распределения аэрозоля f (r), номер выбранной модели аэрозоля атмосферы (если производится выбор модели) и серия интегральных параметров спектра аэрозоля. Функция распределения аэрозоля представляется в виде гистограммы. Программа использует три типа представления функции распределения аэрозоля. размер функции распределения f N(r) = dN / dlog r [cm - 3] – число частиц аэрозоля на единицу объема воздуха и на единицу интервала log r (столбец гистограммы распределения аэрозоля); удельная поверхность функции распределения f S(r) = dS / dlog r [m2 / cm3] – удельная поверхность частиц аэрозоля, содержащихся в единице объема воздуха отнесенная к единице интервала log r; удельный объем функции распределения f V(r) = dV / dlog r [m3 / cm3] – объем частиц аэрозоля, содержащихся в единице объема воздуха, отнесенный к единице интервала log r. Процедура восстановления должна быть выполнена для каждого выбранного типа функции, поскольку критерий гладкости G не может быть выполнен для всех типов функций одновременно. Выявляются также следующие интегральные параметры спектра аэрозоля: rmax r Характеристический радиус частиц rmin rmax r32 3 f N (r ) d (log r ) , [m] r 2 f N (r ) d (log r ) rmin Площадь частиц в единице объема воздуха S rmax rmin Объем частиц в единице объема воздуха V rmax rmin Коэффициент ослабления на длине волны 532 nm dS d(log r ) [m2/cm3] d log r dV d(log r ) [m3/cm3] d log r [km-1] Список использованных источников: 1. Зуев В.Е., Зуев В.В. Дистанционное оптическое зондирование атмосферы. Санкт-Петербург, Гидрометеоиздат, 1992. 2. Зуев В.Е., Кабанов М.В. Оптика атмосферного аэрозоля. Л.; Гидрометеоиздат, 1987. 3. Зуев В.Е., Комаров В.С. Статистические методы модели температурных и газовых компонент атмосферы. – Л.: Гидрометеоиздат, 1987. 4. Зуев В.Е., Креков Г.М. Оптические модели атмосферы. – Л.: Гидрометеоиздат, 1986. 5. Ван де Хюлст. Рассеяние света малыми частицами.- М.: Изд-во иностр. лит., 1961. 6. Дейрменджан Д. Рассеяние электромагнитного излучения сферическими полидисперсными частицами.- М.: Мир, 1971. 7. McClatchey R.A., Fenn R.W., Selly J.S.A. Optical properties of the atmosphere/Rep. AFCRL-71-0279?AFCRL.-Bedford, Massachusetts,USA, 1971. 8. Kneizis F.X., Shettle E.P., Gallery W.O. et.al. Atmospheric transmittance/radiance: computer code LOWTRAN 5//Rep. AFCRL-RT-80-0067. AFCRL.-Bedford, Massachusetts,USA,1980. 9. Кондратьев К.Я., Поздняков Д.В. Аэрозольные модели атмосферы.- М.: Наука,1981. 10. Креков Г.М., Рахимов Р.Ф. Оптико-локационная модель континентального аэрозоля.- Новосибирск: Наука, 1982. 11. Креков Г.М., Рахимов Р.Ф. Оптические модели атмосферного аэрозоля.Томск: Изд. ТНЦ СО АН СССР,1986. 12. Зуев В.Е., Наац И.Э. Обратные задачи лазерного зондирования атмосферы.Новосибирск, Изд. «Наука», Сибирское отделение, 1982. 13. Зуев В.Е., Наац И.Э. Обратные задачи оптики атмосферы. Л. Гидрометеоиздат, 1990. 286 с. 14. Muller D., Wandinger U., Althausen D., et.al. Appl. Optics. 1998. V. 37. P. 2260 2263. 15. Althausen D., Müller D., Ansmann A., et.al. Journal of Atmospheric and Oceanic Technology. 2000. V.17. 14691482. 16. Schneider J. and Eixmann R. Atmospheric Chemistry and Physics. 2002. V. 2, P. 313-323. 17. Chen B., Khmelevtsov S., Korshunov V. and Vdovenkov A. In Proceedings of 21 ILRC, Part I, Québek, Canada, 2002, P. 6568. 18. Müller D., Wandinger U., and Ansmann A. Appl. Optics.1999. V. 38, P. 23462357. 19. Böckmann C. Appl. Optics. 2001. V. 40, P. 1329-1342. 20. Veselovskii A., Kolgotin V., Griaznov D., et.al. Appl. Optics. 2002. V.41, P. 3685 - 3699. 21. Müller D., Wandinger U., and Ansmann A. Appl. Optics.1999. V. 38, P. 23582368. 22. Осипенко Ф.П., Чайковский А.П., Щербаков В.Н. Известия АН СССР. Сер. ФАО.1989.Т.25. № 7. С. 717-722. 23. Наац И.Э. Теория многочастотного лазерного зондирования атмосферы. Новосибирск: Наука, 1980. 156 с. 24. Fernald F. App.Optics. 1984. V.23, P. 652. 25. Whiteman D., Melfi S. and Ferrare R. Appl. Optics. 1992. V. 31. P.3068. 26. Rajeev K. and Parameswaran K. Appl. Optics. 1998. V. 37, P. 4690. 27. Dubovik O., Holben B., Lapyonok T. et al. Geophys. Res. Lett. 2002. V. 29. N.10. 10.1029/2001GL014506. 28. Тихонов А.Н., Арсенин В.А. Методы решения некорректных задач. М.: Наука, 1974. 223 с. 29. Гилл Ф., Мюррей У., Райт М. Практическая оптимизация. М.: Мир, 1985. 509с. 30. Haysaka T., Neguro Y., Sasano Y., and Takamura T. In 17 ILRC, Sendai, Japan 1994, Abstracts of Papers, P. 24. 31. Reiter R., Sladkovic R. and Carnuth W. In Phys.-Chem. Behav. Atm. Pollutants., Proc 2nd Eur. Symp., Varese, 1981, Dordrecht,1982, P. 236-241. 32. Patterson E., Gillette D. J. Geoph. Res., 1977. V. 15. P. 2074-2082. 33. Hobbs P., Radke L. and Hindman E. J. Aeros. Sci., 1976, V.7, P. 195-211. 34. Davies C. J. Aeros. Sci. 1974.V. 5, P. 293-300. 35. Whitby K. Atm. Environ. 1978. V. 12. P. 135-159. 36. Sverdrup G., Whitby K. and Clark W. Atm. Environ. 1975. V. 9. P. 483-494. 37. Tanaka M., Nakajima T. and Takamura T. J. Met. Soc. Japan. 1982. V. 60. P. 1259-1272. 38. Смирнов В.В. Советско-американский эксперимент по изучению аридного аэрозоля. Санкт-Петербург. 1992. С. 143-154. 39. Muller D., Wandinger U., Althausen D., and Fiebig M. Appl. Optics. 2001. V. 40, P. 4863-4869. 40. Cook C.S., Bethke G.W., Conner W.D. Appl. Optics. 1972. V.11. P. 1742. 41. EPA Electronic Code of Federal Regulations. 40-CFR. P.60. Appendix A. 42. Зуев В.Е., Кауль Б.В., Самохвалов И.В. и др. Лазерное зондирование индустриального аэрозоля. Новосибирск: Наука. 1986. 186 с. 43. Дрофа А.С., Коршунов В.А., Романов Н.П. Труды ИЭМ. 1996. В. 26(161). с. 24-30. 44. Mishchenko M.I., Travis L.D., and LacisA.A. Scattering, Absorption, and Emission of Light by Small Particles. Goddard Institute for Space Studies. New York. 2004. 45. Liu Y., Arnott P., and Hallett J. Particle size distribution retrieval from multispectral optical depth: influences of particle nonsphericity and refractive index J. Geophys. Res. 1999. V. 104, N. D24, P. 31,753-31,762. 46. Берлянд М.Е. /Современные проблемы атмосферной диффузии и загрязнения атмосферы. Л. Гидрометеоиздат. 1975. 448 с. 47. Промежуточный отчет «Модернизация астролидарной системы межвузовского центра коллективного пользования для экологического мониторинга воздушного бассейна Белгородского региона» 48. С.С. Хмелевцов, В.А. Коршунов, В.М. Никитин, В.В. Кобелев. Многоволновое и поляризационное зондирование аэрозольных промышленных выбросов. Томск: «Оптика атмосферы и океана», 2004 (в печати). 49. А.С. Дрофа, В.А. Коршунов, Н.П. Романов. Определение оптических локационных характеристик пылевого аэрозоля. Физика атмосферы С.-П. «Гидрометеоиздат, 1996.