УДК 633.62.001.57:651.17 ПРОЕКТИРОВАНИЕ ОПЕРАЦИОННО
реклама

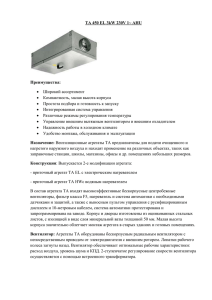
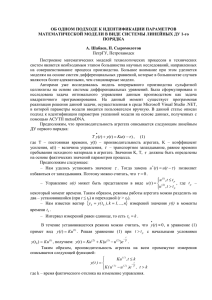
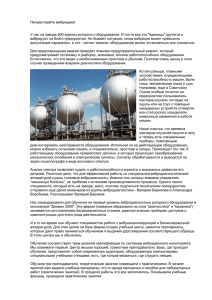
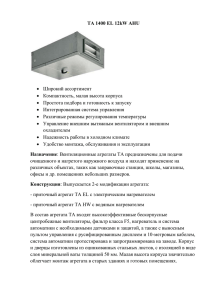
УДК 633.62.001.57:651.17 ПРОЕКТИРОВАНИЕ ОПЕРАЦИОННО-ТЕХНОЛОГИЧЕСКИХ КАРТ В РАСТЕНИЕВОДСТВЕ С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ Кушнарев А., чл-кор. НААНУ, д-р. техн. наук, проф. (УкрНИИПИТ им. Л. Погорелого), Сербий В., к.т.н., с.н.с. (ННЦ «ИМЕСХ»), Кушнарев С., канд. техн. наук, доц. (НАТИ НУБИП) Ключевые слова: растениеводство, операционно-технологическая карта, трехмерные карты полей, технологический комплекс машин, дистанционное зондирование земли, имитационное моделирование, эффективность. Рассмотрена новая возможность применения спутниковой информации в планировании и организации выполнения сельскохозяйственных операций на основе моделирования операционных технологий. Операционно-технологические карты в растениеводстве имеют широкий круг применения. С позиций производителя сельскохозяйственной продукции они обеспечивают планирование и организацию работ на выбранном поле при осуществлении заданной операции, а также оценку материальных затрат на ее выполнение. При таком наполнении содержания «операционно-технологическая карта» адекватна другому определению – «инструкционно-технологическая карта», которое в последнее время широко используется в специальной литературе по машиноиспользованию в АПК [1, 2]. Инструкционно-технологические карты содержат: агротехнические требования, рекомендации по комплектованию и подготовке агрегата к работе, по подготовке обрабатываемого поля и организации работы агрегатов на загонах, указания по контролю качества работ, сведения по охране труда и технике безопасности [2, 3] при реализации технологической операции. Они предполагают технико-экономическую и энергетическую оценку работы выбранного агрегата на заданном поле. Эта информация может послужить основой для достижения многих других целей, среди которых: - выбор оптимального парка машин; - прогнозирование финансовых за трат при наличии тренда роста цен на материальные ресурсы; - прогнозирование и экспертиза экологической эффективности разрабатываемых перспективных технологий и технических решений на стадии проектирования; - структурирование энергозатрат и поиск путей энергосбережения при выполнении операций; - обоснование направлений развития конструкций сельскохозяйственных машин и агрегатов, обеспечивающих повышение эффективности их использования. Учитывая эти потенциальные возможности операционно-технологических карт, видные ученые Беларуси академики М.М. Севернев и И.С. Нагорский дают им такую оценку: «… организация любого производства должна начинаться с технологии, а экономика – с производства. Если технологии не изменяются, то производство и экономика находятся в застое. Поэтому операционные сортовые технологии, без которых нет организационного начала в сельскохозяйственном производстве, должны непрерывно совершенствоваться»[4]. Для каждого типа почвы должен быть определен оптимальный уровень интенсификации обработки на основе операционных технологий. Операционные технологии – это ключ к наиболее полному использованию возможностей потенциала агрегата. Разработка операционно-технологических карт – весьма трудное, часто информационно необеспеченное мероприятие. Использование возможностей информационных технологий позволяет методологически по-новому подойти к решению этой задачи, что и рассмотрено в данной статье. Традиционно, исходной информацией для разработки операционных технологий служат условия выполнения работы: размеры полей (длина гонов), удельное сопротивление почв, урожайность, соломистость, типы и марки тракторов, машин, сцепок и т. п., а также агротехнические требования: агронормативы и допуски на них [2, 5]. А продуктом расчета операционной технологии является операционная технологическая карта. При проведении имитационного моделирования несколько шире используется набор данных, представленный на рис. 1. Рис. 1. Необходимая исходная информация для моделирования работы МТА Агрегат работает в сложных природно-климатических условиях. Технологическая операция выполняется на ограниченном участке поверхности Земли – на поле. Отличительными его чертами, влияющими на эффективность выполнения механизированной операции, считаются конфигурация, рельеф и свойства почвы. Удобно анализировать работу агрегата, представив поле в виде трехмерной модели. Для этого необходимо иметь информацию о геопространственном расположении поля и значениях высот, которые задаются относительно уровня моря в его контрольных точках. К началу XXI века результаты спутниковой фотосъёмки получили широкое распространение благодаря общедоступности и простоте работы с ними, многие сайты предоставляют бесплатный доступ к базам данных таких фотографий –GoogleEarth, Google Maps, NASA World Wind, TerraServer-US, Yahoo! Maps, Космоснимки, Yandex карты и др. Разрешение спутниковых фотографий различно в зависимости от инструмента фотографирования и высоты орбиты спутника. Коммерческие спутники серии QuickBird фирмы DigitalGlobe имеют самую высокую на сегодняшний день разрешающую способность — 60 см, то есть позволяют опознавать объекты на поверхности Земли размером менее полуметра. Программа GoogleEarth выгодно отличается от аналогов благодаря удобному интерфейсу и предоставляет доступ к спутниковым изображениям, привязанным к виртуальному глобусу Земли (рис. 2), а также вмещает инструменты, которые позволяют выделять контуры полей, расставляя опорные точки – вершины многоугольника, и сохранять геометрические фигуры в географических координатах, в файле с расширением KML, что очень удобно для дальнейшей обработки и сохранения результатов. Точность привязки снимков в GoogleEarth достаточна для проведения геометрических вычислений. Экспериментами подтвердили валидацию снимков, которые показали, что отклонение контрольной точки, полученной с помощью GPS-приемника, от псевдоточки на снимке составляет 1-2 м. Такое отклонение в точности привязки снимков не влияет на правильность проведения расчетов и преобразований, т. к. при отклонении в 2 м ошибка определения длины линии составляет порядка 1.10-4%, что означает: на каждый километр отклонение будет составлять ±1 мм. То же самое относится и к различным геометрическим преобразованиям. Более 85% территории покрыто снимками с достаточно высоким разрешением – 2 м на пиксель и выше. Точность определения площади поля по космическому изображению с разрешением в 2 м составит для 1 га: ±8%, 10 га: ±4,4%, 100 га: ±0,8%. Значения высот можно получать с помощью GPS-приемника. При отсутствии такового предлагается использовать данные спутниковой радарной интерферометрической съемки Shuttle Radar Topographic Mission (SRTM) и американской геологической разведки Geographic Survey's Topographic Map (GTOPO30), объединенных в одну базу данных (SRTM3) и предоставляемую бесплатно [7] для пользования. Периодически обновляемая версия (на текущий момент доступна версия V.2.1) содержит данные на всю территорию Украины с шагом в 3 арксекунды. По долготе одна арксекунда равна 30,87 м, а по широте для диапазона от 45°-54°, характерного для нашей страны, составит 21,83– 18,14 м соответственно. Значения высоты имеют систематическую ошибку, т.е. одно и то же значение отклонения распространено на значительную часть территории (рис. 3). Так, по спецификации NASA для Евразии среднеквадратическое отклонение составляет 3,7 м, среднее арифметическое – -0,7 м и абсолютная ошибка в 90% случаев – 6,2 м. Рис. 3 – Абсолютная ошибка данных SRTM3 для Евразии (Украина) Данные являются простым 16-битным растром (индексированная цветовая палитра), значение пикселя обозначает высоту над уровнем моря в данной точке, пиксель также может принимать значение -32768, что соответствует значению no data (нет данных). Высотные данные поставляются с точностью значений в 1 м. Значения высот округляются по законам математического округления. Это значит, что максимально возможная ошибка наклона поверхности между двумя опорными точками, расположенными на расстоянии 90 м друг от друга, составит α = arctan(1/90) = ±0,63°. Работать с географическими координатами в натуральном виде неудобно, поэтому преобразовываем их в прямоугольные координаты Декартовой системы, используя формулы прямого и обратного перевода в универсальную поперечную проекцию Меркатора (UTM). В сравнении с проекцией Гаусса-Крюгера, на границе каждой 6° зоны проекция Меркатора имеет в два раза более высокую точность за счет пересечения мнимого цилиндра, на поверхность которого проецируется сферический участок, в двух точках с исследуемой зоной. Таким образом, на каждый километр максимальная ошибка определения длины на краях зоны составляет около 25 см. Имеющейся информации достаточно для построения трехмерной модели поля, представленной вершинами Мn многоугольника М и внутренними интерполированными значениями контрольных точек Мn с шагом dS, удовлетворяющей условию M0(x, y, z) … Мn(x, y, z) ∈ M. Состав функционально-структурной схемы математической модели (рис. 4) расчета операционных технологий, главным элементом которой является имитационная модель работы агрегата, выглядит таким образом. Где F1 – выбор направления движения агрегата; F2 – по строение активной зоны; F3 – построение рабочего хода; F4 – построение холостого хода; F5 – оптимизация рабочих ходов; F6 – расчет эксплуатационно-технологических показателей; F7 – расчет приведенного расхода топлива; F8 – расчет приведенных энергетических затрат; F9 – ранжирование и составление технологического набора машин по критерию наименьших приведенных затрат. F1 ( , x, y ) 0, F2 ( Lk , r , Bс. х. м. , Bтр , , x, y, APx, APy) 0, F3 ( B, x, y, APx, APy, , drx, dry ) 0, F4 (drx, dry , БД _ трактор, БД _ c.х. м) 0, F5 ( Lk , r , B, drx, dry , сх.дв., opx, opy ) 0, F6 (drx, dry , opx, opy, БД _ рельеф, БД _ тяг.х к , БД _ c.х.м, t a.c. ) 0, E min, Q min, min, tа.с. [T ]. F7 ( APx, APy, Q, e) 0, F8 (e, Z , A, TO, TP, E , ) 0, F9 ( E , KM , ) 0. Рис. 4 – Состав функционально-структурной схемы математической модели Для облегчения создания математической модели процесс функционирования агрегата (рис. 4) разделили на мелкие подпроцессы: определение ширины разворотной полосы и построение активной зоны (1), построение рабочих ходов (2), построение холостых ходов (3), интерполяция высот (4), методика расчета агрегата и выбора его режимов работы (5). Изложим математические модели этих подпроцессов. 1. Определение ширины разворотной полосы и построение активной зоны. Для исследования процесса формирования активной зоны изучалось влияние конструктивных параметров агрегата на ширину разворотной полосы. Выяснено, что ширина разворотной полосы является функцией вида: E = f(Lk, r, B, g) (1) где: Lk – кинематическая длина агрегата, м; r – радиус поворота агрегата, м; B – ширина агрегата, м; g – угол атаки агрегата, град. Получены следующие формулы (табл. 1): для полукруглого способа выполнения поворота при челночном способе движения и по загонкам, петлевого поворота, и поворота типа «восьмерка». Построение активной зоны (рис. 5) заключалось в от бивке разворотных полос для всех сторон поля, с которыми есть пересечение рабочего хода Rx Pn-1Pn. Таблица 1 Формулы определения ширины разворотной полосы № Тип повороту Напівкруглий спосіб виконання повороту з використанням човникового способу руху і по загінках B r r cos 2 E sin arccos 2 2 B B 2 r r 2 r r cos 2 2 (2) 2 B B 2 r r 2 r r cos Lk sin g `, 2 2 За умови g 2 g , g ` g ; g g , g ` g . 2 Петльовий грушеподібний поворот 1 E sin arccos 2 2 B r 2 r2 4 2 g За умови g 2 B B r r 2 2 r r cos 2 2 2 B B 2 r r 2 r r cos 2 2 B Lk r tg g ` sin g , 2 2 (3) r 2 2 B r cos 2 g , g ` g ; g , g ` g . Зігнутопетльовий поворот типу «вісімка» B r 3 r cos 2 E sin arccos 2 2 B B 2 r 9 r 6 r r cos 2 2 2 B B r 9 r 2 6 r r cos Lk sin g `, 2 2 (4) g g За умови g 2 2 2 g , g ` g ; g , g ` g ; AB 3 r ; g 2 AB r. 2. Построение рабочих ходов. Как известно, полей с идеально прямоугольной формой в природе немного, над ними преобладают поля со сложной, разнообразной конфигурацией. Рис. 5 – Построение рабочего хода Для построения рабочих ходов (рис. 5) используется следующий алгоритм: 2.1 по строение описанного прямоугольника M в направлении движения агрегата; 2.2 расчет координат отрезков, построенных в направлении движения агрегата с шагом, равным ширине сагрегатированной сельскохозяйственной машины, в области описанного прямоугольника (отрезок CD); 2.3 отсечение концов отрезка, которые выходят из зоны рабочей области (отрезок AB). Находим вершины прямоугольника M1, M2, M3, M4, образованные сечением опорных прямых l M. Для этого зададим вектор q'(-n, m) единичной длины и перпендикулярный вектору . Проекции векторов , , ..., на вектор и : Pn = = -nxn + myn, Pn = n = mx + ny (5) Находим максимальную Pn _ max(P) и минимальную Pn _ min(P) проекции для формул (5). Через вершины многоугольника проводим опорные линии соответственно lп и lл в точках Pп = P2(xп, yп) і Pл =P0(xл, yл) и соответственно lв і lн в точках Pв=P1(xв, yв) и Pн=P3(xн, yн). На пересечении линий lл, lп, lв, lн образуются точки M1, M2, M3, M4 – вершины описанного прямоугольника П. Обозначим M1 = lл lв, M2 = lп lв, M3 = lп lн, M4 = lл _ lн. Для нахождения их координат Mn(x, y) воспользуемся следующим выражением: (6) Координата исходной точки отрезка рабочего хода рассчитывается по стороне w постепенным спуском на шаг b, равный ширине сельскохозяйственной машины, а координата второй точки рассчитывается Таблица 2 Параметрические уравнения исходных точек относительно первой смещением на величину, равную стороне h под углом (табл. 2). При пересечении DC со стороной AP0AP1 получаем точку A(x, y), а со стороной AP3AP4 – точку B(x, y). 3. Построение холостых ходов. Координаты опорных точек холостого хода нужны для определения режима работы агрегата при выполнении разворота и оптимизации типа выполняемого поворота. Координаты точек определялись с помощью формул поворота осей. 4. Интерполяция высот. Для интерполяции высотных точек воспользуемся предположением пространственной автокорреляции, что точки, расположенные по близости друг к другу, будут иметь более близкие значения, чем те, которые отдалены друг от друга. По общей формуле ординарного кригинга находим значение высоты в искомой точке: (15) где: Zi – значение высоты i-й опорной точки, м; рi – вес i-ой опорной точки; G-1 – обратная матрица G значений дисперсий; g – векторная матрица значений дисперсий от искомой точки ко всем опорным точкам. 5. Методика расчета агрегата и выбора его режимов работы. Оценку эффективности работы составленного агрегата определяли по критерию наименьших приведенных энергетических затрат: (16) оценку совершенства использования совокупной энергии, которая тратится агрегатом на выполнение технологической операции (КПД), определяли по формуле: (17) а выбор передачи на рабочем и холостом ходу определяли по критерию наименьшей приведенной затраты топлива: (18) Методика динамического анализа работы агрегата заключалась в регистрации изменения касательной силы при движении на участке длины с заданным шагом интерполяции по тяговым характеристикам трактора: часовой затрате топлива q = f(Pk) и скорости агрегата v = f(Pk). С учетом этого определялось время прохождения данного участка dt = dS/v и затрата топлива на данном участке dq = qdt. Потом определялась суммарная затрата топлива и затраты времени на выполнение всего объема работ: (19) Для реализации математической модели на ЭВМ методом имитационного моделирования создана блок-схема алгоритма для вычисления влияния возмущаюших факторов на функционирование агрегата (рис. 6): A1 – начало моделирования; A2 – введение начальных условий (поле, культура, технология); A3 – счетчик тракторов, способных выполнять технологическую операцию в соответствии с агротребованиями; A4 – счетчик сельхозмашин, способных выполнять технологическую операцию в соответствии с агротребованиями; A5 – построение рабочих ходов; A6 – построение холостых ходов; A7 – расчет технико-экономических показателей; P8 – проверка на лучший вариант агрегата по критерию наименьших приведенных энергозатрат среди сельхозмашин; P9 – проверка на лучший вариант агрегата по критерию наименьших приведенных энергозатрат среди тракторов; A10 – исходные показатели, A11 – конец моделирования. Рис. 6 –Блок-схема моделирующего алгоритма Наиболее точное определение режимов работы агрегата достигается с использованием тяговых характеристик трактора (рис. 7). К таким выводам пришли и другие ученые [6]. Для использования тяговой характеристики трактора в цифровом виде, графики аппроксимировали в уравнение регрессии 7-ой степени. Для автоматизации процесса использовалось приложение FindGraph. Автоматизированная система моделирования ОТ обеспечивает всеми необходимыми рассчетами по приведенному алгоритму (рис. 6) и выдает значения искомых показателей. Выходные результаты работы имитационной модели функционирования МТА могутбыть представлены следующими показателями (рис. 8): трактор (марка), сельхозмашина (марка), производительность (W), удельный расход топлива (q), время выполнения операции (T), полный расход топлива (Q), коэффициент рабочих ходов ( ), коэффициент использования рабочего времени ( ), коэффициент использования площади поля ( ), передача на рабочем ходу (peredacha), передача на холостом ходу (peredachaxol), скорость на рабочем ходу ( ), скорость на холостом ходу ( ), приведенные энергозатраты (E), коэффициент использования энергии, затраченной на выполнение технологической операции (η). а) б) № Швидкість, км/год Паливо, кг/год 1 2 3 4П3 13.79339 - 0.20429623*P + 0.079394932*P^2 - 0.01177119*P^3 + 0.00084386441*P^4 - 3.2056987e005*P^5 + 6.0787033e-007*P^6 4.5401027e-009*P^7 19.164072 + 1.5005074 * P 0.16336982 * P ^ 2 + 0.023793078 * P ^ 3 - 0.0017071953 * P ^ 4 + 0.000058688891 * P ^ 5 0.00000097261131 * P ^ 6 + 6.2593975E-09 * P ^ 7 3П3 10.650456 + 0.22310634*P 0.05551097*P^2 + 0.0054999626*P^3 0.00029414247*P^4 + 8.9090336e006*P^5 - 1.4427571e-007*P^6 + 9.4419662e-010*P^7 18.59186 + 0.39768397*P + 0.11454427*P^2 - 0.018237056*P^3 + 0.0012977197*P^4 - 4.5635006e-005*P^5 + 7.6659765e-007*P^6 - 4.93465e009*P^7 17.345411 + 1.0356241*P 2П3 9.3122905 + 0.084537557*P 0.018036271*P^2 + 0.0017882045*P^3 - 0.10698258*P^2 + 0.011173026*P^3 0.00010570704*P^4 + 3.4254263e0.00055066663*P^4 + 1.3602798e006*P^5 - 5.6314161e-008*P^6 + 005*P^5 - 1.679883e-007*P^6 + 3.6023757e-010*P^7 8.3015566e-010*P^7 в) Рис. 7 – Тягова характеристика трактора ХТЗ-80: а – скорость; б – затрата топлива; в – имитационная модель Рис. 8 – Вид модели с выходными показателями Идентификация имитационной модели работы МТА была проведена на опытных полях УкрНИИПИТ им. Л. Пого релого методом хронометража по ГОСТ 24055-88. Затраты топлива регистрировались мерной линейкой, прикрепленной к топливному баку, а продолжительность выполнения технологических режимов при работе агрегата замерялась секундомером механическим Соспр-2б-2-010, видеокамерой и GPS-прибором Eten Glofish X800. По результатам испытаний средняя погрешность для производительности агрегата составила 2,4%. Имитационная модель адекватна (табл. 3). Были сравнены значения производительности, взятые из справочника нормативов [8], и данными технологической карты [9] по выращиванию лукарепки для одинаковых агрегатов, выполняющих технологическую операцию. Приведенные значения отличались один от другого: на 21,3% – для пахоты агрегатом Т150К+ПЛН-5-35, на 83,7% – для боронования агрегатом Т150К+БЗТС-1,0, на 18,1% – для культивации агрегатом Т150К+КПСП-4,0 (табл. 4). По приведенным официальным данным видно, что значения сменной выработки одного и того же агрегата на одной и той же операции разные в каждом источнике. Решить эту проблему можно с использованием имитационной модели работы агрегата для конкретных полевых условий. Моделирование было проведено на четырех полях с прямоугольной формой и выровненным рельефом (в пределах одного фермерского хозяйства) и разной площадью: 10 га, 26 га, 52 га и 99 га. Такая градация полей подобрана для того, чтобы доказать неизбежность изменения эксплуатационно-технологических показателей, приведенных в технологической карте, не только в количественном, но и в качественном выражении, зависимых от размеров поля. При этом значение производительности по технологической карте остается постоянным значением для любого поля, а в действительности должно меняться при изменении площади поля, его формы, рельефа, а не оставаться константой. Значения отличаются и от результатов, смоделированных имитационной моделью. Для вспашки и боронования отклонения от модели по технологической карте составляют 22-26%, по справочнику нормативов – 53-128%, тогда как для культивации по технологической карте отклонения составляют 1,5%, а по нормативу – 16,3%. Можно сделать вывод, что нормативы и показатели из технологической карты содержат неточные данные, и только по некоторым операциям – достоверные. ВЫВОДЫ. 1. Разработана методика расчета операционных технологий на основе спутниковой информации (представленной спутниковыми изображениями, полученными путем фотографирования поверхности земли космическими аппаратами, и рельефом поверхности земного шара, полученным радарной интерферометрической съемкой SRTM3). 2. Эксплуа та ционно-технологические показатели работы МТА генерируются разработанной имитационной моделью функционирования агрегата. 3. В отличие от нормативного способа, имитационная модель создает цифровой прототип агрегата и привязывает конструктивные и тяговые характеристики к конкретным полевым условиям. Список литературы 1. Завора В.А. Основы технологии и расчета мобильных процессов растениеводства: учебное пособие / В.А. Завора, В.И. Толокольников, С.Н. Васильев. Барнаул: Изд-во АГАУ, 2008. – 263 с. 2. Фортуна В.И. Эксплуатация машинно-тракторного парка / В.И. Фортуна. – М.: Колос, 1979. – 375 с. 3. Хробостов С.Н. Эксплуатация машинно-тракторного парка / С.Н. Хробостов – Изд. 2-е перераб. и доп. М.: Колос, 1973. – 607 с. 4. Севернов М.М. / М.М. Севернов, К.С. Нагорский // Известия академии наук Беларусии. – 2004. – №2. 5. Курочкин И.М. Эксплуатация машинно-тракторного парка: учебное пособие для с.-х. вузов / И.М. Курочкин. Тамбов : Изд-во Тамб. гос. техн. ун-та. – 1996. – 200 с. 6. Гафуров И. Д. Оперативное нормирование полевых механизированных работ / И. Д. Гафуров //Техника в сельском хозяйстве. – 2009 – №3. – С. 26-29. 7. Index of /srtm/version2_1/SRTM3 [Електронний ресурс]. http://dds.cr.usgs.gov/srtm/version2_1/ SRTM3/ – Заголовок с экрана. 8. Справочник по планированию в агропромышленном комплексе / В. Д. Гревцов, С. С. Копнин, Б. Ф. Беспалый и др.; под ред. В. Д. Гревцова. – К.: Урожай, 1991. – 424 с. 9. Технологічні карти та витрати на вирощування сільськогосподарських культур / За ред. П.Т. Саблука, Д.І. Мазоренка, Г.Є. Мазнева. – Харків: ХНТУСГ. – 2004. – 307 с.