Условия покоя дискретной механической системы.
реклама

1
Лекция 2
Момент силы относительно оси
Лемма о проекциях позволяет ввести в рассмотрение новую характеристику силы по отношению
к оси. Определение. Моментом силы F относительно оси z называется алгебраическая
величина, равная проекции на эту ось момента силы относительно произвольной точки указанной
оси.
mz(F)=прzmA(F)
(A принадлежит z)
(17)
Рассмотрим способ вычисления и свойства момента. Пользуясь произволом выбора центра
моментов на оси, выберем в качестве такового т.О- проекцию точки А приложения силы на ось z.
Обозначив через к орт оси z, и применив круговую перестановку в смешанном произведении,
запишем
mz(F)=k.(OAxF)=(kxOA).F=hFCosa
(18)
F
Здесь
учтено,
что
ввиду
взаимной
перпендикулярности
векторов
k и OA,
Z
.
модуль произведения kxOA равен расстоянию ОА точки приложения сил до
kxOA
.
A
оси.
k
.
h
o
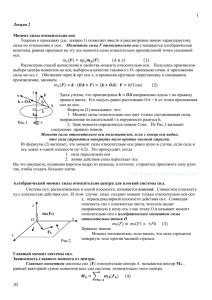
Формула показывает, что:
а) Момент относительно оси дает только составляющая силы,
направленная по касательной t к окружности радиуса h.
+
б) Знак момента определяется знаком Cos. Из Рис.8 вытекает
Рис.8
следующее правило знаков: Момент силы относительно оси
положителен, если с конца оси видно, что сила стремится повернуть
тело против часовой стрелки.
Из формулы (12) вытекает, что момент силы относительно оси равен нулю в cлучае, если сила
и ось лежат в одной плоскости (a=/2). Это происходит, когда
1) сила параллельна оси
2) линия действия силы пересекает ось
Алгебраический момент силы относительно центра для плоской системы сил.
Система сил, расположенных в одной плоскости, называется
z
плоской.
Расположим в плоскости действия сил оси xy с началом в
m o(F k)
+
произвольной точке О плоскости. В этом случае силы создают момент
F k y только относительно оси z, перпендикулярной плоскости действия сил.
O
Располагая силы на плоскости листа, читатель видит ось как точку
O
и
называет
момент относительно этой оси алгебраическим моментом
x
силы относительно точки O
Рис.1
mo(F)=mz(F)=+Fh
(21)
Правило знаков: Момент положителен, если видно, что сила стремится повернуть тело против
Главный момент системы сил. Зависимость главного момента от центра.
Определение: Главным моментом системы сил {F} относительно центра О
называется векторная сумма моментов всех сил системы относительно этого центра.
MA=mA(Fk)
(2)
Л2
2
Практически, главный момент находят по его проекциям на декартовы оси. Эти проекции
логично назвать главными моментами системы сил относительно осей x, y, z.
MA2=Mx2+My2+Mz2;
Mx=mx(Fk); My=my(Fk); Mz=mz(Fk)
Cos(MAx)=Mx/MA;
Cos(MAy)=My/MA;
Cos(MAz)=Mz/MA
(3)
Найдем зависимость между главными моментами относительно двух центров А и В.
Суммируя полученную ранее зависимость для одной силы по всем силам системы, получим:
mA(Fk)=mB(Fk)+ABxFk
MA=MB+ABxV
(4)
Здесь учтено определение главного вектора V.
Вращательная система. Пара сил.
Формула (4) показывает, что в общем случае главный момент зависит от центра.
Однако, если главный вектор системы равен нулю, то ее главный момент не зависит от
центра. Назовем такую систему сил вращательной системой.
Простейшей вращательной системой является пара сил: система двух равных по
модулю противоположно направленных сил, не лежащих на одной прямой.
m
Расстояние h между линиями действия сил пары называется плечом
пары.
F
h
.
Главный вектор сил пары очевидно равен нулю, поэтому ее главный
A
B
момент не зависит от центра, называется моментом пары m и может
F'= - F
быть найден как момент одной из сил пары относительно точки
o
приложения второй силы.
Рис.2
MO{F,F'}=m =mA(F)=mB(F')
(7)
Момент пары перпендикулярен плоскости пары и направлен в сторону,
откуда видно что пара стремится повернуть тело против часовой стрелки.
Условия покоя дискретной механической системы.
Механическая система состоит из материальных точек. Она будет находиться в покое,
если каждая из точек системы находится в покое. Поэтому логично сначала изучить условия
покоя материальной точки. Они вытекают из принципов механики.
Принципы (аксиомы) механики. Условия покоя точки.
Как все точные науки, механика базируется на недоказуемых постулатах, вытекающих из
опыта и называемых аксиомами. Являющиеся плодом размышлений многих поколений
исследователей, аксиомы были окончательно сформулированы Исааком Ньютоном в 17
веке и поэтому носят его имя.
1. Принцип инерции Галилея
Существует система отсчета, называемая инерциальной, в которой изолированная
точка сохраняет состояние покоя.
Изолированной называется точка, не взаимодействующая с другими точками.
Таким образом, точка остается в покое, пока на не нее не подействует сила. Следует
заметить, что система отсчета, связанная с Землей не является инерциальной из-за вращения
Земли.
2. Основной принцип (второй закон Ньютона)
Ускорение материальной точки пропорционально действующей на нее силе.
Л2
3
mW=F
(8)
Принцип указывает, что результатом действия силы является изменеие скорости (состояния)
точки, и действие это тем меньше, чем больше масса тела. В дальнейшем все силы будем
сравнивать по ускорениям, которые они вызывают. Силы, вызывающие одинаковые
ускорения, называются равнодействующими или эквивалентными.
3. Принцип равенства действия и противодействия (третий закон Ньютона).
Свойства внутренних сил.
Силы взаимодействия двух точек равны по модулю, противоположны по направлению и
лежат на прямой, проходящей через точки.
F’=-F
Следует заметить, что эти силы приложены к разным точкам, и поэтому, в общем случае не
уравновешивают друг друга. Если точки принадлежат одному и тому же телу, то силы их
взаимодействия называются внутренними (индекс i). Поскольку все внутренние силы парны,
то, очевидно, что их главный вектор (сумма) и главный момент равны нулю.
Vi=0, MiO=0
4. Принцип независимости действия сил
До сих пор вопрос о смысле и применимости веторных операций к силам оставлся
открытым. Следующий принцип позволяет складывать силы в точке в том смысле, что
сложение не изменяет ускорения точки.
Ускорение точки под действием системы сил {F} равно векторной сумме ускорений точки
от каждой силы системы в отдельности.
W{F}=W(Fk)
(9)
Следствия:
а) Силы, приложенные к точке, имеют равнодействующую, равную векторной сумме
исходных сил (правило параллелограмма). Действительно, по второй аксиоме:
F2
R=F 1+ F 2 W{F1;F2}=W(F1)+W(F2)=F1/m+F2/m=(F1+F2)/m=R/m (10)
R~{F1;F2}; R=F1+F2
Второй закон Ньютона теперь можно записать и для случая действия
нескольких сил.
M
F1
mW=Fk
б) В покое остается не только изолированная точка, но и точка под действием сил,
сумма которых равна нулю. Таким образом, необходимым и достаточным условием
равновесия сил, приложенных к точке, является
Fk=0
(11)
Л2
4
Условия покоя произвольной дискретной механической системы
Рассмотрим дискретную систему n материальных точек. Система находится в покое,
если все ее точки находятся в покое. При этом силы, действующие на каждую точку,
находятся в равновесии.
Обозначим через Fkе равнодействующую внешних сил, приложенных к точке с
номером к, а через Fki- равнодействующую внутренних сил этой точки. Из аксиом
вытекает, что условия
Fkе+ Fki=0 (k=1,2,…,n),
(12)
обеспечивают покой системы и являются неоходимыми и достаточными условиями
равновесия сил, приложенных к произвольной дискретной механической системе.
Необходимые условия равновесия внешних сил системы.
Если система находится в покое, то любая комбинация или часть условий (12)
выполняется, и, значит, является необходимым, но недостаточным условием равновесия.
Внутренние силы системы обычно являются неизвестными, поэтому особый интерес
представляет комбинация условий (12), исключающая эти силы. Свойства парности
внутренних сил позволяют составить такие комбинации.
Суммируюя (12) по k, и учитывая, что главный вектор внутренних сил равен нулю,
получаем
Ve=0
Векторно умножив слева (12) на радиус-вектор точки rk, после суммирования получим
второе условие
Moe=0
Оба условия касаются только внешних сил системы и являются необходимыми, но не
достаточными условиями покоя произвольной механической системы. Далее покажем,
что они являются необходимыми и достаточными условиями покоя твердого тела.
Л2