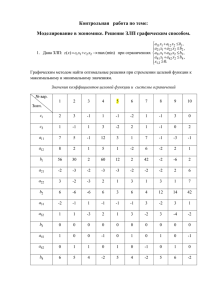
1. основные математические понятия и обозначения
реклама

3
1. ОСНОВНЫЕ МАТЕМАТИЧЕСКИЕ ПОНЯТИЯ И
ОБОЗНАЧЕНИЯ
Одним из основных математических понятий является понятие
множества.
Определение: Множеством называют совокупность каких-то объектов,
объединенных по некоторому правилу или признаку.
Примеры множеств: - натуральные числа, целые числа, действительные числа.
Определение: Объекты, которые входят в состав множества, называют
элементами данного множества.
Обычно множества обозначаются большими латинскими буквами
(A, B, C), а их элементы – малыми (a, b, c).
Определение: Множество, которое имеет конечное число элементов – именуется конечным множеством; бесконечное - бесконечным.
Обычно любое множество задается некоторым свойством, т.е. таким
свойством, которым обладают только элементы данного множества,
например: M = a,b,c,d - некоторое множество.
Множество натуральных четных чисел: N2={2*n, где nN}
Определение: Множество, которое не содержит ни одного элемента, называется пустым множеством и обозначается
0
1.1
Множества чисел и их обозначения
N - множество натуральных чисел{1,2,3,…, n,…. }
Z - множество целых чисел
{…-3,-2,-1,0,1,2,………. }
Q - множество рациональных чисел – это те числа, которые можно представить в виде дроби m/n, где m -принадлежит множеству целых чисел, а n - множеству натуральных чисел
Q={m/n, mZ, nN}
Иррациональные числа:
J={ 2, 3, , e, …..}
Множество действительных чисел: R=Q U J
Множество комплексных чисел:
C={a+i*b; i=-1, a, bR}
Любое множество графически можно изобразить в виде круга (диаграммы Эйлера-Венна):
А
Определение: Множество В называется подмножеством множества А ,
(В А), если любой элемент множества В, является элементом множества А.
3
4
A
ВА
B
1.2
Основные операции над множествами
1. Сумма (Объединение) двух множеств А и В называется такое
множество, которое состоит только из тех элементов, которые принадлежат хотя бы одному из множеств А или В.
В виде характеристического свойства
- А U В={x, xA или xB}
Если изображают
в виде кругов
A
B
Пример:
А={1,2,3} B={2,4,5}
АUВ
А U В={1,2,3,4,5}
2. Произведение (Пересечение) двух множеств А и В состоит из тех
элементов, которые одновременно принадлежат и множеству А и множеству В:
А В={x, xA и xB}
для рассмотренного
выше примера:
A
B
АВ
А В={2}
3. Разность двух множеств А и В (обозначается А\В) – называется
множество, состоящее из элементов, которые принадлежат множеству А и
не принадлежат множеству В
А\В={x, xA и x B}
A
B
А\В
Для рассмотренного выше
примера:
А\В={1,3}
1.3
Логические символы
Для краткости записи, вместо слов:
будет использован символ
вместо слов любой, каждый, всякий
x, x+1N
Примеры:
1.4
;
существует,
,
.
найдется,
xX,X:2
Специальные математические символы
Для краткости записи произведения первых n-натуральных чисел вводят:
1*2*3*4*……..* n = n! ,
n –факториал.
1!=1 ,
2!=1*2=2 ,
5!=1*2*3*4*5=120,
0!=1
0-факториал.
4
5
Для краткости записи суммы и произведения будем использовать символы:
n
сумма
ai = a1+a2+a3+….+an ; ai = a1+a2+…+an +...;
i=1
i=1
n
ai = a1*a2*a3*….*an
Произведение
i=1
2. ЛИНЕЙНАЯ АЛГЕБРА
2.1
Определители и их свойства
Определение1: Определителем второго порядка называется число, которое:
- обозначается следующим символом
a11
a21
a12
a22
- и вычисляется по следующей формуле
a11
a12
a21
a22
1
2
= a11*a12 – a21*a12 , где aij – числа; i, j = 1,2
aij – элемент определителя, расположенный в i-той
строке и j-том столбце.
= 1*4 – 2*3 = 4 – 6 = -2
3
4
Определение2:Определителем третьего порядка называется число, которое
обозначается следующим символом и вычисляется по следующей формуле:
a11
a21
a31
a12
a22
a32
a13
a23
a33
= a11*a22*a33 + a12*a23*a31 + a21*a32 * a13 - a31*a22 * a13 – a21*a12 * a33 – a32*a23 * a11
Для более легкого запоминания формул используется правило треугольников:
“+“
“–“
*
*
*
*
*
*
*
*
*
;
*
*
*
*
*
*
*
*
*
В соответствии со схемой треугольников вычисляются произведения
и, при формировании общей суммы, произведения элементов берутся:
- по главной диагонали и образующим треугольникам со сторонами,
параллельными этой диагонали,
– со знаком
“+”
5
6
- по вспомогательной диагонали и образующим треугольникам со
сторонами, параллельными этой диагонали,
– со знаком
“-“
Пример:
1
0
2
Вычислить определитель:
2
-1
4
3
1
6
= 1*(-1)*6 + 0*4*3 + 2*(-1) * 3 - 2*(-1) * 3- 0*2 * 6 – 4*1*1 = -6 + 0 + 4 + 6 – 0 – 4 = 0
Определение: Определитель первого порядка равен непосредственно своему единственному элементу: | a11 | = a11 .
Определение: Минором элемента aij некоторого определителя называют
определитель, который обозначают Мij и получают из данного
определителя, вычеркиванием
i – строки и j-того столбца.
a11 a12 a13
Для определителя:
= a21 a22 a23
получим:
A31 a32 a33
a22
M11 = a32
и так далее.
a23
a33
M12 =
a21
a31
a23
a33
M13 =
a21
a31
a22
a32
Для представленного выше примера:
1
M22 = 2
3
6 = 1*6 – 2*3 = 0 ,
1
M23 = 2
2
4
= 1*4 – 2*2 = 0.
Определение: Алгебраическим дополнением элемента aij называют число
Аij, которое вычисляют по следующей формуле
Аij = (-1)(i+j) * Мij
Свойства определителей
2.2
1. Если в определителе поменять местами строки и столбцы с одинаковыми номерами, то значение определителя при этом не изменится
(справедливо как для определителя 2-го порядка, так и 3-го).
a11
a21
a31
a12
a22
a32
a13
a23
a33
=
a11
a12
a13
a21
a22
a23
a31
a32
a33
Это свойство легко доказывается, если подсчитать значения определителей слева и справа.
2. Если в определителе поменять местами две строки или два столбца, то
значение определителя изменит свой знак на противоположный.
6
7
a11
a21
a31
a12
a22
a32
a13
a23
a33
a21
= a11
a31
a22
a12
a32
a23
a13
a33
3. Если в определителе есть две одинаковые строки или столбца, то этот
определитель равен нулю.
4. Если элементы какой либо строки или столбца, имеют общий числовой
множитель, то этот множитель можно вынести за знак определителя.
*a *b
a
b
c
d
= *
c
d
5. Если в определителе элементы двух строк или столбцов пропорциональны, то определитель равен НУЛЮ.
*a *b
a
b
= 0
6. Если в определителе элементы какой-либо строки или столбца представляют собой сумму 2-х слагаемых, то данный определитель можно
записать в виде суммы двух определителей.
=
a11 + a’11
a21
a31
a12 + a’12
a22
a32
a13 + a’13
a23
a33
=
a11
a21
a31
a13
a23
a33
a’11
a21
a31
a’13
a23
a33
a12
a22
a32
+
a’12
a22
a32
7. Если к элементам какой либо строки или столбца прибавить элементы
другой строки или столбца умноженные на число отличное от 0 (нуля),
то значение определителя не изменится.
a11
a21
a31
a12
a22
a32
a13
a23
a33
=
a11 + *a21
a21
a31
a12 + *a22
a22
a32
a13+*a23
a23
a33
8. Разложение
определителя
по
строке
или
столбцу.
Любой определитель равен сумме произведений элементов какой либо строки (или столбца) на их алгебраические дополнения.
a11
a21
a31
a12
a22
a32
a13
a23
a33
= a11*A11 + a12*A12* + a13 *A13 =
= a12*A12 + a22*A22* + a32 *A32 = ………..
7
8
Доказательство:
a11
a21
a31
a12
a22
a32
a13
a23
a33
= a11*a22*a33 + a12*a23*a31 + a21*a32 * a13 - a31*a22 * a13 – a21*a12 * a33 – a32*a23 * a11 =
= a11*(a22*a33 - a32*a23) - a12*(a21*a33 - a23*a31) + a13 *(a21*a32 – a31*a22 ) =
= a11*A11 + a12*A12 + a13 *A13
Пример:
1
4
3
2
2
1
3
-1
1
4 -1
3 1
3
+ 2*(-1) *
2
= 1*A11 + 2*A12 + 3*A13 = 1*(-1) *
4
3
4
+ 3 *(-1) *
2
1
2 -1
1 1
+
= 1*(2 – (-1)) +
2*(-1) * (4+3) + 3*(4 – 6) = 3 – 14 – 6 = - 17
9. Сумма произведений элементов какой-либо строки (столбца) на алгебраические дополнения элементов другой строки (столбца) равна нулю.
a11*A21 + a12*A22* + a13 *A23 = 0
Определение: Определителем n-ого порядка называется число, которое
обозначается следующим символом и вычисляется по существующей формуле:
a11 a12 a13 …… a1n
a21 a22 a23 …… a2n
…………………………….
an1 an2 an3 …… ann
= a11*A11 + a12*A12* +……. + a1n *A1n
Пример: Вычислить определитель 4-го порядка :
1
0
2
1
0
-2* 2
1
2
1
0
2
3
3
1
3
3
1
3
-1
-2
1
4
-1
-2
1
=1*
0
+3* 2
1
1
0
2
3
1
3
1
0
2
-1
-2
1
-1
-2
1
-
0
-4* 2
1
1
0
2
3
1
3
=
= 1*(-3) – 2*(-17) +3*(-8) – 4*7 = - 3 + 34 – 24 – 28 = - 21
8
9
2.3
Матрицы и их свойства
Определение: Матрицей размерности mxn (m на n) называют таблицу
чисел, которая состоит из m строк и n столбцов.
a11 a12 a13 …… a1n
a21 a22 a23 …… a2n
…………………………….
am1 am2 am3 …… amn
Определение: Если в матрице число строк совпадает с числом столбцов
(m=n), то матрица называется квадратной порядка n и для
квадратных матриц вводят понятие определителя матрицы (т.е.
определителя для элементов данной матрицы).
Квадратная матрица называется единичной, если по главной диагонали матрицы стоят единицы, а все остальные элементы матрицы равны 0
(нулю).
1
E= 0
0
1
- единичная
матрица
2-го порядка
E=
1
0
0
0
1
0
0
0
1
- единичная
матрица
3-го порядка
Матрица, полученная из матрицы "А" заменой строк столбцами с
сохранением нумерации, называется транспонированной матрицей по отношению к матрице "А" и обозначается AT.
A=
a11
a21
a12
a22
T
A =
2.4
a11
a12
a21
a22
Операции над матрицами
Определение: Матрица А равна матрице В, если в этих матрицах равны
между собой все соответствующие элементы:
aij = bij
для всех
i,j
Матрицы одинакового порядка можно складывать и вычитать.
1. Сумма (разность) двух матриц:
A=
a11
a21
a12
a22
a11 b11
A B = a21 b21
B=
b11
b12
b21
b22
a12 b12
a22 b22
2. Умножение матрицы на число, отличное от нуля:
*A =
*a11 *a12
*a21 *a22
,
0
9
10
3. Произведение двух матриц:
Умножать можно только те матрицы, для которых выполняется
условие: число столбцов первой матрицы
равно
числу строк
второй матрицы.
Сумма произведений элементов первой строки первой матрицы на
элементы первого столбца второй матрицы определит элемент С11 матрицы произведения. И таким образом для всех Cij элементов произведения:
a11 a12
A*B = a21 a22
b11 b12
* b21 b22
a11 * b11 + a12 * b21
a21 * b11 + a22 * b21
=
=
a11 * b12 + a12 * b22
a21 * b12 + a22 * b22
Пример:
1 2 3
A*B = 4 5 6
1 1
* 2 1
3 4
=
1+4+9
4+10+18
1+2+12
4+5+24
=
14 15
32 33
Для суммы и произведения матриц справедливы следующие соотношения:
1)
2)
3)
8)
A+B=B+A
C*(A+B)=C*A+C*B
(A*B)*C=A*(B*C)
4) A+(B+C) = (A+B)+C
5) (*A)*B = *(A*B)
6) ( + )*A = *A+*A
7) *(A+B) = *A+*B
A*E=E*A=A
,
где E –единичная матрица.
Для матриц, в общем случае, умножение не перестановочно:
A*B B*A
Определение: Матрица А-1 называется обратной для квадратной матрицы
А, если выполняется следующее соотношение:
А*А-1=А-1*А = Е
Понятие обратной матрицы вводится только для квадратных матриц.
Теорема: Матрица А имеет обратную тогда и только тогда, когда определитель матрицы не равен нулю:
1
-1
A =
A
для A =
*
A11
A12
A13
A21
A22
A23
a11
a21
a31
a12
a22
a32
a13
a23
a33
A31
A32
A33
A – определитель матрицы А
10
11
Доказательство:
Чтобы доказать, что матрица А-1 является обратной для матрицы А,
необходимо показать выполнение следующего равенства:
А*А-1=А-1*А=Е
1
-1
A *A =
A
*
A11
A12
A13
A21
A22
A23
A31
A32
A33
a11
a21
a31
*
a12
a22
a32
a13
a23
a33
1
=
A
*
A11*a11+A21*a21+A31*a31 A11*a12+A21*a22+A31*a32 A11*a13+A21*a23+A31*a33
* A12*a11+A22*a21+A32*a31 A12*a12+A22*a22+A32*a32 A12*a13+A22*a23+A32*a33 =
A13*a11+A23*a21+A33*a31 A13*a12+A23*a22+A33*a32 A13*a13+A23*a23+A33*a33
A
0
0
1
=
*
A
0
A
0
0
0
A
=
1
0
0
0
1
0
0
0
1
что и требовалось доказать.
Пример: Вычислить матрицу, обратную данной:
1 1 -1
A = 4 -3 1
2 1 -1
; A =
1 1 -1
4 -3 1
2 1 -1
= 1*(-3)*(-1) + 1*1*2 + 4*1*(-1) -
- 2*(-3)*(-1) – 1*1*1 – 4*1*(-1) = 3+2-4-6-1+4 = -2
-3 1
1 -1 = 2
A11 = (-1)
1+1
A13 = (-1)
1+3
4 -3
2 1 = 10
A22 = (-1)
2+2
1 -1
2 -1 = 1
A31 = (-1)
3+1
1 -1
-3 1 = - 2
A33 = (-1)
3+3
1 1
4 -3 = - 7
1
-1
A =
*
A
2.5
A11
A12
A13
A21
A22
A23
;
;
;
;
A31
A32
A33
A12 = (-1)
1+2
4 1
2 -1
= 6;
A21 = (-1)
2+1
1 -1
1 -1
= 0;
A23 = (-1)
2+3
1 1
2 1
= 1;
A32 = (-1)
3+2
1 -1
4 1
= - 5;
2
6
10
-2
-5
-7
1
=-
*
2
0
1
1
Экономическая интерпретация действий над матрицами
Пусть имеется n-видов товара, причем известны их цены.
Pi – цена соответствующего товара (i=1,2,3,….n).
11
12
Xi – приобретенное количество соответствующего товара.
Запишем это в виде матриц-столбцов.
P1
X1
P2
X2
P = ….
X = …..
Pn
Xn
Используя эти матрицы, стоимость всех приобретенных товаров
можно определить с помощью произведения следующих матриц:
X1
PT * X = ( P1 P2 …..Pn ) * X2
….
Xn
n
= P1*X1+P2*X2+….+Pn*Xn = Pi*Xi
i=1
Допустим, что товары данного вида приобрели K покупателей. Обозначим Xij – количество товара i-того вида, приобретенное j-тым покупателем.
Здесь i=1,2,….n; j=1,2,….k. Введем матрицу:
X=
x11 x12 x13 …… x1k
x21 x22 x23 …… x2k
…………………………….
Xn1 xn2 xn3 …… xnk
Элементы j-того столбца матрицы представляют собой кол-во различных товаров, приобр. j–тым покупателем., а элементы i-той строки
представляют собой количество товара i-того вида, приобретенных различными покупателями.
Произведение матриц РТ*Х будет являться вектором-столбцом, все
элементы которого представляют собой затраты каждого покупателя.
2.6
Системы линейных уравнений
Определение. Уравнение вида а11*х1+а12*х2+….+а1n*хn=b1
(1)
называют линейным алгебраическим уравнением с nнеизвестными , где
а11, а12,…. а1n, b1
- заданные числа (известные).
х1, х2,…, хn
- неизвестные числа.
Определение. Упорядоченный набор чисел k1,k2,…kn называют решением
уравнения (1), если при подстановке этих чисел в уравнение (1)
вместо неизвестных х1, х2,…, хn в соответствии с равными индексами, мы получаем верное равенство.
12
13
Определение. Системой m линейных уравнений с n неизвестными называют систему вида:
а11*х1+а12*х2+….+а1n*хn=b1
а21*х1+а22*х2+….+а2n*хn=b2
(2)
……………………………………….
аm1*х1+аm2*х2+….+аmn*хn=bm
Определение. Упорядоченный набор чисел k1,k2,…kn называют решением
системы (2), если этот набор чисел является решением каждого
уравнения этой системы.
Определение. Две линейные системы называются равносильными, если
они имеют одни и те же решения.
Определение. Систему линейных уравнений называют совместной, если
она имеет хотя бы одно решение,
Несовместной - если она не имеет решений.
Определение. Совместная система линейных уравнений называется определенной, если она имеет только одно решение.
Система является неопределенной, если она имеет более одного решения.
2.7
Решение систем линейных уравнений при помощи формул Крамера
Рассмотрим систему из 3-х линейных уравнений с 3-мя неизвестными.
а11*х1+а12*х2+а13*х3=b1
а21*х1+а22*х2+а23*х3=b2
а31*х1+а32*х2+а33*х3=b3
Введем обозначения: за определитель
обозначим определитель, состоящий из коэффициентов при неизвестных. В определителях 1,
2, 3 соответствующий столбец коэффициентов заменен столбцом свободных членов уравнений:
а11 а12 а13
= а21 а22 а23
а31 а32 а33
2=
а11 b1 а13
а21 b2 а23
а31 b3 а33
,
,
1=
b1 а12 а13
b2 а22 а23
b3 а32 а33
3=
а11 а12 b1
а21 а22 b2
а31 а32 b3
,
Теорема: если определитель отличен от 0, то данная система линейных
уравнений имеет единственное решение, которое находится по
следующим формулам:
X1= 1/ X2= 2/ X3= 3/
формулы Крамера.
13
14
Доказательство:
Умножим первое уравнение данной системы на А11, второе – на А21,
третье – на А31 и все сложим. Получим следующее равенство:
(a11*A11 + a21* A21+ a31* A31 )*X1 + (a12 * A11+ a22* A21 + a32* A31 ) * X2 +
+ (a13*A11 + a23* A21 + a33* A31 )*X3 = (b1*A11 +b2*A21 + b3*A31 ) = 1
поскольку: (a11*A11 + a21* A21+ a31* A31 ) =
(a12 * A11+ a22* A21 + a32* A31 ) = 0
(a13*A11 + a23* A21 + a33* A31 ) = 0
X1 = 1 и X1 = 1 /
Аналогично получим:
X2 = 2 и X2 = 2 / , если домножим на A12; A22; A32 .
X3 = 3 и X3 = 3 / , если домножим на A13; A23; A33 .
Верность решения доказана.
Пример:
x+ 2*y + z = 4
3* х - 5*y+3*z = 1 ;
2*х + 7*y – z = 8
1 2 1
= 3 -5 3
2 7 -1
= 5+12+21+10-21+6 =
= 33
4 2 1
1= 1 -5 3
8 7 -1
= 20+7+48+40-84+2=33
x = 1 / = 33/33 = 1
1 4 1
2= 3 1 3
2 8 -1
= -1+24+24-2-24+12=33
y = 2 / = 33/33 = 1
1 2 4
3= 3 -5 1
2 7 8
= -40+84+4+40-7-48=33
z = 3 / = 33/33 = 1
Следствие: если определитель равен 0, то система либо не имеет решений, т.е. несовместна, либо имеет бесконечно много решений, т.е. неопределенная.
2.8
Решение систем линейных уравнений матричным способом
Рассмотрим систему:
а11*х1+а12*х2+а13*х3=b1
а21*х1+а22*х2+а23*х3=b2
а31*х1+а32*х2+а33*х3=b3
Данную систему можно записать в матричной форме следующим образом:
14
15
где
А- основная матрица системы, составленная из коэффициентов при неизвестных
X – матрица-столбец, составленная из неизвестных
B – матрица-столбец, составленная из свободных членов.
A*X=B
A=
a11
a21
a31
a12
a22
a32
a13
a23
a33
,
X=
x1
x2
x3
,
b1
b2
b3
B=
Теорема: Если матрица А невырожденная, т.е. ее определитель А отличен от нуля, то наша система имеет единственное решение, которое можно записать следующим образом:
X=A-1*B
Доказательство:
Т.к. матрица А имеет определитель отличный от 0, то для нее существует обратная матрица А-1 . Нашу систему мы записали в матричной
форме. Домножим обе части системы слева на матрицу А-1.
A-1*A*X=A-1*B , тогда
Е*X= A-1*B или
X= A-1*B
теорема доказана
Пример:
2*x1 +3*x2 = 5
x1 - x2 = 0
X=A *B
2 3
A = 1 -1
A11 = -1
A21=-3
A22=2
-1
A
A12=-1
= -(1/5) *
=
;
= -5;
-1 -3
-1 2
-1 -3
-1 2
X = -(1/5) *
1
1
-1
*
5
0
= -(1/5) *
-5 -0
-5 0
-5
= -(1/5) * -5
=
x1 = 1
x2 = 1
2.9
Линейные системы общего вида
Рассмотрим систему линейных уравнений с
n-неизвестными
а11*х1+а12*х2+….+а1n*хn=b1
а21*х1+а22*х2+….+а2n*хn=b2
……………………………………………
(1)
аm1*х1+аm2*х2+….+аmn*хn=bm
Основной матрицей данной системы является матрица
15
16
а11 а12 ..… а1n .
а21 а22 …. а2n
A = ………………
аm1 аm2 …...аmn
Матрица, которая получается из основной матрицы посредством добавления столбца свободных членов, называется расширенной матрицей:
а11 а12 …… а1n b1
а21 а22 …... а2n b2
A = ……….…………..
аm1 аm2 …...аmn bm
Систему (1) можно записать в виде:
X=
x1
x2
…
xn
A*X=B
, где:
b1
b2
B= …
bm
Определение: Элементарными преобразованиями системы линейных уравнений называются следующие преобразования:
1. Умножение любого уравнения системы на число отличное от нуля.
2. Прибавление к одному из уравнений системы другого ее уравнения,
умноженного на произвольное число отличное от нуля.
3. Перестановка местами 2-х уравнений.
При элементарных преобразованиях системы линейных уравнений те же
преобразования производятся над расширенной матрицей системы.
Определение: Эквивалентными системами линейных уравнений называются системы, которые получаются одна из другой посредством элементарных преобразований.
Определение: Минором матрицы называется определитель, образованный
элементами этой матрицы, который получается из данной
матрицы посредством выделения определенного равного числа
строк и столбцов. Порядком минора называется порядок определителя (число строк определителя).
Примеры:
1 2 3
A= 2 8 9
4 5 7
1 2
M2 = 4 5
- минор 2-го порядка.
M1 = 1
- минор 1-го порядка.
Определение: Рангом матрицы называется наибольший порядок минора
матрицы, отличного от нуля.
r(A) – ранг матрицы
16
17
Пример:
A=
1 2 3
4 5 6
2 4 6
определим ранг:
1 2 3
M3= 4 5 6
2 4 6
=0
1 2
M2= 4 5 =1*5-4*2=-3
т.о. r(A)=2 - ранг матрицы равен 2
Определение: Базисным минором матрицы называется любой ее минор,
порядок которого совпадает с рангом матрицы.
Теорема: При элементарных преобразованиях матрицы ее ранг не меняется.
Определение: Ступенчатой матрицей называется матрица, которая имеет
ступеньку из 0 (нулей), удовлетворяющую определенным
свойствам (см. пример).
Примеры:
1 2 3
С= 0 1 4
0 0 5
D =
Теорема:
1 2 4 5
0 0 1 2
0 0 0 4
- ступенчатая матрица
r(C)=3
- ступенчатая матрица
r(D)=3
Ранг ступенчатой матрицы равен числу ее ненулевых строк.
Теорема: Любую матрицу при помощи элементарных преобразований
можно привести к ступенчатой.
Пример:
1 3 1 2
А= 2 0 1 3
3 3 2 4
~
1 3 1 2
0 -6 -1 -1
0 -6 -1 -2
~
1 3 1 2
0 -6 -1 -1
0 0 0 -1
При первом преобразовании:
- каждый элемент второй строки складываем с соответствующим
элементом первой строки умноженным на (-2)
- каждый элемент третьей строки складываем с соответствующим
элементом первой строки умноженным на (-3)
При втором преобразовании:
- каждый элемент третьей строки складываем с соответствующим
элементом второй строки умноженным на (-1)
17
18
Теорема (критерий совместности Кронекера-Капелли): Система линейных уравнений совместна (имеет решения) тогда и только тогда, когда ранг ее основной матрицы равен рангу расширенной
матрицы.
r(A)=r( A )
Следствие: Если ранги не равны, то системы соответственно не имеют
решений.
Теорема
(критерий определенности) : Совместная система линейных
уравнений будет определенной, если ранг ее основной матрицы
равен числу неизвестных переменных.
Следствие: Если ранг основной матрицы совместной системы меньше
числа неизвестных, то система имеет бесконечное множество
решений, т.е. она неопределенная система.
2.10 Решение систем линейных уравнений методом Гаусса.
Суть метода Гаусса состоит в последовательном исключении неизвестных из системы.
Схема решения:
1. Выписываем расширенную матрицу системы
и
при помощи элементарных преобразований сводим ее к ступенчатому
виду.
2. Определяем ранги основной и расширенной матрицы.
3. Если ранг основной матрицы не равен рангу расширенной матрицы, то
система не совместна, т.е. не имеет решения.
4. Если r(A)=r( A ) = n и равен числу неизвестных, то система определенная,
т.е.
имеет
единственное
решение.
С помощью элементарных преобразований приводим расширенную
матрицу
к
удобному
для
последующего
решения
виду.
При помощи расширенной матрицы, полученной после элементарных
преобразований, записываем эквивалентную систему и решаем ее.
5. Если r(A)=r( A ) < n, то в этом случае система неопределенная, т.е.
она имеет бесконечное множество решений.
При помощи преобразованной расширенной матрицы:
- записываем эквивалентную систему по последней матрице,
- выбираем основные переменные (коэффициенты при которых входят в базисный минор). Их число будет равно r(A),
- оставшиеся переменные будут свободными,
- начинаем выражать основные переменные через свободные,
придавая свободным переменным произвольные значения,
- получим бесконечное множество решений.
За основные переменные принимаются те переменные, коэффициенты
при которых образуют базисный минор основной матрицы системы.
18
19
Примеры:
x+ y=1
2*x+2*y = 5
A =
1 1
2 2
1
5
1 1
~ 0 0
1
3
;
Поскольку r( A ) = 2 , r( A )=1
- система не имеет решений.
При преобразовании второй строки каждый член второй строки складывали с соответствующим членом первой строки, умноженным на (-2).
2*x+3*y - z = 1
2*x+4*y+2*z = 2
3*x - y + z = 4
~
2 3 -1
; A= 2 4 2
3 -1 1
1
2
4
~
2 3 -1
0 1 3
0 -11 5
1
1
5
~
Поскольку r( A ) = 3 r( A ) = 3 и n = 3
система имеет единственное решение.
2 3 -1 1
0 1 3 1
0 0 38 16
При первом преобразовании:
- каждый элемент второй строки складывали с соответствующим
элементом первой строки умноженным на (-1),
- каждый элемент третьей строки умноженный на (+2) складывали с
соответствующим элементом первой строки умноженным на (-3).
При втором преобразовании:
- каждый элемент третьей строки складывали с соответствующим
элементом второй строки умноженным на (11).
2*x1-4*x2+6*x3 -2*x4 = 4
x1 + x2 - x3+2*x4 = 0
~
2 -4 6 -2
0 -6 8 -6
2 -4 6 -2
; A = 1 1 -1 2
1
0
~
4
4
При преобразовании - каждый элемент второй строки умноженный
на (-2) складывали с соответствующим элементом первой строки
Поскольку
r( A ) = r( A ) = 2 < n = 4 - система имеет бесконечное множество решений, - две основные переменные x1 и x2 и две
свободные - x3 и x4.
2*x1-4*x2+6*x3 -2*x4 = 4
- 6*x2+8*x3 -6*x4 = 4
2*x1-4*(-2/3+(4/3)*x3-x4)+6*x3 -2*x4 = 4
x2 = -2/3+(4/3)*x3 - x4
19
20
2*x1+8/3-16/3 - x3+6*x3 + 4*x4-2*x4 = 4
x2 = -2/3+(4/3)*x3-x4
;
x1=2/3 –(1/3)*x3-x4
x2=-2/3+(4/3)*x3-x4
x3 x4 - свободные переменные. Они могут принимать произвольные значения:
x3 = C1 , x4 = C2, x1=2/3-C1/3-C2,
x2=-2/3+(4/3)*C1-C2 , C1,C2 R.
2.11 Экономическая интерпретация систем линейных уравнений
Пусть производится n видов продукции, для чего используется m
видов сырья. Пусть известны величины:
Xij – количество ресурса i-того вида,
необходимого для производства продукции j-того вида, а также известны:
- bi –общий расход i-того ресурса
- aj – количество произведенной продукции j-того вида.
Матрица X – матрица затрат:
X=
x11 x12 …. x1n
x21 x22 …. x2n
………………
xm1 xm2 ..…..xmn
Матрица А – матрица выпуска продукции. Матрица В – объем ресурсов.
a1
a2
A= …
an
B=
b1
b2
… .
bm
В матрице Х элементы 1-й строки (например) обозначают затраты
ресурса 1-го вида на производство единицы продукции различных видов, а
элементы 1-го столбца – затраты ресурсов различных видов на производство единицы продукции 1-го вида.
В этом случае соотношение между израсходованными ресурсами и
произведенной продукцией можно записать в виде матричного уравнения:
X*A=B
Это есть не что иное, как система линейных уравнений с
n-неизвестными. С ее помощью решаются экономические задачи планирования производства продукции.
20
21
3.
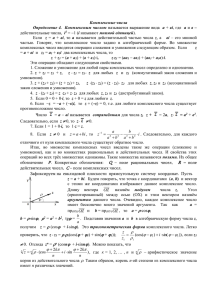
ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ
3.1
Основные понятия
Все величины математики разделяются на скалярные и векторные.
Скалярными называются величины, которые полностью определяются при помощи числа, полученного в результате их измерения однозначной величиной, принятой за эталон (единицу эталона).
Векторными называются величины, для которых кроме числовых
значений их размера необходимо указывать их направление в пространстве (скорость, сила).
Для геометрического изображения векторных величин служат
направленные отрезки, т.е. отрезки, имеющие фиксированное направление
в пространстве.
Вектором называют направленный отрезок, у которого указывают
начало и конец.
B
A
AB или
- обозначают вектор.
Длиной вектора называют длину направленного отрезка.
Вектор называется нулевым, если его длина равна 0. Для нулевого
вектора, естественно, нет определенного направления.
Два вектора называются равными, если равны их длины и
они
одинаково направлены.
Два вектора называются противоположными если их длины равны, а направления противоположны.
Два вектора называются коллинеарными, если эти вектора лежат
на одной прямой или на параллельных прямых. тогда угол между коллинеарными векторами равен 180о или 00 (
b ).
Три вектора называются компланарными, если эти вектора лежат
в одной плоскости или на параллельных плоскостях.
Ортом называется вектор единичной длины.
3.2
Действия над векторами
Суммой векторов А и В называют вектор С:
- начало которого совпадает с началом вектора А,
- конец совпадает с концом вектора В,
- при условии, что конец вектора А и начало вектора В совпадают.
21
22
Правило треугольника:
Правило параллелограмма:
b
+b
+b
b
Разностью векторов А и В называют такой вектор С, который в сумме с
вектором В даст вектор А.
-b
b
Умножение вектора на число, отличное от нуля. При умножении вектора
А на число получаем вектор С, который коллиниарен вектору А, а длина
его будет равна
| C |= | | * | A |
Если >0, то С сонаправлен с А
.
Если < 0, то С и А имеют противоположное направление:
- 2*
2*
3.3
Свойства действий над векторами
1.
A+B= B+A
2.
A+(B+ C)=(A + B) + C
3.
*(* A)=(* )*A ,
4.
(+)*A=(* A)+(*A)
5.
*( A + B)=(*A)+(*B)
3.4
, - числа.
Проекция вектора на ось
Пусть в пространстве задана ось “l” и задан вектор АВ
Через точки А и В проведены плоскости перпендикулярные оси “l”.
Эти плоскости пересекают нашу ось в точках А1 и В1.
Определение: Проекцией вектора АВ на ось “l” называют величину
направленного отрезка А1В1. Если направление вектора А1В1
совпадает с направлением оси “l” то проекция вектора - есть
длина отрезка
А1В1 .
22
23
Если A1B1
B
l, то проекция - величина
- A1B1
A
l
A1B1
, если l
A1B1
- A1B1
, если l
A1B1
Пр l AB =
B1
A1
Координаты точки на числовой оси, на плоскости
и в пространстве
3.5
Определение: Числовой осью называют прямую, на которой указано положительное направление, начало отсчета и масштаб. Координатой точки на оси называют проекцию радиус-вектора данной точки на ось.
x
X , M(x), x = ПрX OM
0 1
M
Определение: Прямоугольной декартовой системой называют две взаимно перпендикулярные оси, которые имеют общее начало отсчета и масштаб.
Y
y
M(x,y)
x = ПрXOM
X
O
y = ПрYOM
x
Определение: Прямоугольной декартовой системой в пространстве называются три взаимно перпендикулярные оси с общим началом
отсчета и масштабом.
Z
x = ПрXOM
Z
y = ПрYOM
M(x,y,z)
O
x
y
Y
z = ПрZOM
M1
X
23
24
3.6
Теоремы о проекции вектора на ось
Теорема 1: Проекция вектора на ось равна произведению длины вектора
на косинус угла между вектором и числовой осью.
ПрlAB = AB * cos
,
= ( AB, l )
Доказательство: рассмотрим 2 случая:
1)
A
B
C
A1B1
l
A1
l ,
cos = AC / AB
AC = AB *cos,
B1
A1B1 = AB * cos
ПрlAB = AB * cos
Что и требовалось доказать.
2) B
C
A1B1
A
B1
l
A1
- A1B1 = AB * cos , т.о.
Что и требовалось доказать.
l
AC = AB * cos ( 1800 - )
A1B1 = - AB * cos
ПрlAB = AB * cos
Теорема 2: Проекция вектора на числовую ось равна разности координат начала и конца вектора.
A(XA,YA,ZA) , B(XB,YB,ZB),
ПрXAB = XB - XA , ПрYAB = YB - YA
ПрZAB = ZB - ZA ,
Доказательство:
A1B1 = OA1 + OB1 , OA1 = XA ; OB1 = - XB
B
C
A1B1 = XA – XB , - A1B1 = XB – XA
A
l
B1 О A1
ПрXAB = XB - XA
Что и требовалось доказать.
Теорема 3: Проекция суммы двух векторов на числовую ось равна сумме
проекций этих векторов на данную ось.
Прl(a + b) = Прl a + Прl b
Доказательство:
A2 Поскольку длина A1’ A3’ = A1’ A3’ + A1’ A3’ ,
a
b
A3
то Прl A1A3 = Прl A1A2 + Прl A2A3 ,
A1
a + b
l то есть
Прl(a + b) = Прl a + Прl b ,
’
’
’
A1
A2
A3
24
25
что и требовалось доказать.
Теорема4: При умножении вектора на число его проекция также умножается на это число (отличное от нуля):
Прl (* ) = * Прl
Доказательство:
* (>0)
= ( , l )
l 1 = (* , l ), если <0
1
* (<0)
1) >0,
Прl (* ) = * * cos = * * cos = * *cos =
= * Прl
2) <0, Прl (* ) = * *cos(1800-)= - * * cos = - * *cos =
= * Прl ,
что и требовалось доказать.
Если в пространстве задан вектор , то для него вводят координаты
(x, y, z) ,x = Прx ,
y = Прy ,
z = Прz .
Следствия из теорем:
1) = (x, y, z) ,
b = (x bx, y by, z bz)
b = (bx, by, bz) ,
2) * = (*x, *y, *z)
3) Условие коллинеарности векторов:
b =
3.7
x / b x = y / b y = z / b z
Длина вектора. Направляющие косинусы вектора
Z
Пусть
aZ
a = (aX, aY, aZ)
a
O
aY
Y
aX
X
Так как a является диагональю параллелепипеда, то квадрат
его длины равен сумме квадратов всех измерений параллелепипеда:
25
26
a 2 = (a2X + a2Y + a2Z), откуда a = (a2X + a2Y + a2Z)
ПрXa = a *cos,
ПрYa = a *cos,
Направляющие косинусы вектора а
cos = aX / a
cos = aY / a
ПрZa = a *cos,
будут
cos = aZ / a
Из вышеизложенного следует, что для направляющих косинусов
справедливо следующее:
сos2 + cos2 + cos2 = (a2X + a2Y + a2Z) / a 2 = 1
3.8
Понятие базиса. Разложение вектора по базису
Рассмотрим в пространстве прямоугольную систему координат.
Изобразим вектор так, чтобы он выходил из начала координат:
Z
Z
A
k
O
X
Y
j
Y
i
B
X
Определение: Базисом для прямоугольной системы координат называют
тройку векторов
i, j, k,
Теорема ( Разложение вектора по базису):
Любой вектор в пространстве, который имеет координаты
(X,Y,Z) может быть разложен по базису следующим образом:
= X *
Доказательство:
i + Y * j +
OA = OB + OAZ -
Z * k
(см.рис). Из основания параллелепипеда можно
получить, что вектор OB = OAX + OAY откуда: OA = OAX + OAY + OAZ
Рассмотрим векторы:
OAX i - коллинеарен, т.е. OAX = X * i
OAY j , тогда
OAY = Y * j
OAZ k , тогда
OAZ = Z * k
,
26
27
т.о.
= X * i + Y * j + Z * k,
3.9
что и требовалось доказать.
Скалярное произведение векторов
Определение: Скалярным произведением векторов и b называется
число равное произведению длин этих векторов на косинус угла между ними.
* b = * b * cos
= ( , b),
b * cos = Пр b
b
* cos = Прb , тогда
* b = * Пр b = b * Прb
3.9.1 Свойства скалярного произведения.
1) * b = b *
- переместительное свойство
2) ( * ) * b = * ( * b )
3) ( + b ) * c = * c + b * c
суммы
- распределительное относительно
( + b ) * c = c * ПрC ( + b ) = c* (ПрC + ПрCb) = * с + b * c
4) * = 2 -
квадрат длины
5) Условие перпендикулярности двух векторов:
b
*b =0
3.9.2 Следствия из свойств скалярного произведения.
1. Скалярные произведения одноименных ортов равны 1
i 2=j 2=k 2=1
2. Скалярные произведения разноименных ортов равны 0
i*j =j*k = k*i =0
3.9.3 Скалярные произведения векторов через координаты
Пусть = x *i+ y *j+ z*k
b = bx *i+ by *j + bz *k
Тогда на основании выше рассмотренных свойств
* b = x *bx* i 2+ x *by*i * j+ x*bz*i * k + y*bx* j * i +
27
28
+ y * by * j 2+ y * bz * j * k + z * bx * k * i + z * by * k * j+
z * b z * k
2
= x * b x + y * b y + z * b z
3.10 Векторное произведение двух векторов
Векторным произведением векторов и b является такой вектор c,
для которого выполняются следующие условия:
1) Длина вектора c равна площади параллелограмма, построенного на
векторах и b
2) c перпендикулярен и c перпендикулярен b ,
c ; c b
3) вектор c направлен таким образом, чтобы кратчайший поворот от
вектора к вектору b происходил против часовой стрелки, при условии,
что мы наблюдаем с конца вектора c. В этом случае говорят, что векторы
, b, c, образуют правую тройку векторов.
c
b
Свойства векторного произведения:
1) x b = - b x
3) ( + b ) x c = x c + b x c
Следствия из данных
2) * x b = *( x b )
4) x b = 0
b
свойств:
1) i x j = j x j = k x k = 0 ;
2) i x j = k ,
jxi=-k,
kxi=j,
jxk=i,
kxj=-i;
3) = x *i + y*j + z *k ,
i x k = - j,
b = bx *i + by *j + bz *k ,
x b = x*bx* i x i + x*by* i x j + x*bz* i x k + y*bx* j x i + y*by* j x j
+ y*bz* j x k + z*bx* k x i + z*by* k x j + z*bz* k x k =
= x*by* k - x*bz* j - y*bx* k + y*bz* i + z*bx* j - z*by* i =
= (y*bz - z*by ) * i + (z*bx - x*bz) * j + (x*by - y*bx) * k =
28
29
=
i
x
bx
Пример:
xb=
j
k
y* z
by bz
= ( 3 ; -1 ; 2 ) ,
-1
3
2
-5 *i
-
,
b = (- 2 ; 3 ; -5)
3
-2
2
-5
*j
3
2
+
-1
3
*k
= -1* i + 11* j + 11* k
3.11 Смешанное произведение векторов
Определение: Скалярное произведение векторного произведения векторов
и b на вектор c называют смешанным произведением
векторов , b и c .
( x b) *с = * b *с
= (x ,y,z )
Пусть
xb=
i
j
x y
bx by
y*
= bx
k
z
bz
z
by * i -
=
x
bx
y z
( x b) * c = bx by * cx =
x y
bx by
cx cy
с = (сx ,сy,сz )
b = (bx ,by,bz )
z
bz
cz
z
bz
+
x
bx
y
by
*k
x z
bx bz * cy +
x
bx
y
by
* cz =
*j
= *b *c
(условное обозначение смешанного произведения).
Получили формулу для нахождения смешанного произведения:
*b *c =
x
bx
cx
y
by
cy
z
bz
cz
Пример:
Даны 3 вектора. = (1,2,1) ,
b = (3,4,0) ,
c = (0,1,1).
29
30
Найти смешанное произведение:
1
3
0
( x b) * c =
2
4
1
1
0
1
= 4+3–6=1
Свойства смешанного произведения
3.11.1
1) * b * c
= - *c*b= -c*b *
*b *c = b*c* = c**b
2) * ( b1 + b2) * c
3) (* ) * b * c
= * b1 * c + * b2 * c
= * ( * b * c )
,
- число.
3.12 Геометрический смысл смешанного произведения векторов
Пусть даны векторы , b, c , которые не лежат в одной плоскости.
Построим на них параллелепипед:
d
C
c
O
= OA
B
B
b = OB
d= x b
c = OC
d = Sосн – площадь основания.
A
V = Sосн * H
объем тела. H – высота.
H = Прd c проекция вектора с на вектор d, который перпендикулярен
плоскости основания.
Объем Vn = d * Прd c = d * c = ( x b ) * c = * b * c , если острый.
Если - тупой, то
Vn = * b * c - модуль смешанного произведения.
Теорема (условие компланарности 3-х векторов) :
Три вектора , b , c – компланарны
*b*c = 0
Доказательство:
1. Необходимость: Допустим, что , b , c – компланарны, т.е. все находятся в одной плоскости.
d=xb
30
31
d
будет перпендикулярен плоскости, в которой лежат и b ,
тогда c d , т.к. c лежит в той же плоскости, что и и b
поэтому: ( x b )* c = 0
2. Достаточность:
Пусть * b * c = 0
- исходное условие.
Пусть , b , c - некомпланарны, т.е. они не лежат в одной
плоскости.
Однако объем параллелепипеда равен нулю, а это возможно лишь в том
случае, когда все линии его граней лежат в одной плоскости.
Откуда , b , c - компланарны , что и требовалось доказать.
3.13
N-мерные векторы
Определение: n-мерным вектором называют упорядоченную совокупность n чисел.
= (1, 2, ….., n)
b = (b1, b2, …...., bn)
Для n –мерных векторов существует N-мерное пространство.
Для n –мерных векторов вводят операции сложения векторов и
умножения вектора на число:
+ b = (1+ b1, 2+ b2,….., n + bn )
* = ( *1, *2, ….., *n)
Определение:N-мерным векторным пространством называют множество
всех n –мерных векторов относительно операций сложения
векторов и умножения вектора на число:
n
R - n - мерное пространство.
R2 – двумерное пространство векторов = (1, 2)
Пусть дана система n-мерных векторов: 1, 2, ….., n
(1)
Определение: Вектор b называется линейной комбинацией системы, если существуют такие числа 1, 2, …..n, , для которых
выполняется следующее равенство:
b = 1*1 + 2* 2 +….. + n*n
31
32
3.14 Линейная зависимость (независимость) системы векторов
Определение: Система (1) называется линейно зависимой, если существуют числа k1, k2, …..kn, из которых хотя бы одно отлично от
нуля, но при этом выполняется следующее равенство:
k1*1 + k2* 2 +……. + kn*n = 0
Определение: Система векторов (1) называется линейно независимой, если
последнее равенство выполняется только тогда, когда все числа равны нулю:
k1 = k2 = …. = kn = 0
Теорема (критерий линейной зависимости векторов) : Если ранг матрицы, составленной из координат векторов системы равен числу
векторов, то данная система линейно независима.
Если ранг матрицы, составленной из координат векторов системы
меньше числа векторов, то система векторов линейно зависима.
Пример:
( 3, 0, 2, 4)
b ( 6, 0, 4, 8)
b=2*
b-2* =0
откуда: и b линейно зависимы.
( 4, 1)
b ( 5, 6)
4 1
5 6
4 1
0 19
r(A)=2 – числу векторов – вывод – векторы линейно независимы, т.е.
k1* + k2* b = 0 , если k1 = k2 = 0
3.15 Разложение вектора по некоторому базису
Определение: Базисом системы векторов (1) называют такую ее подсистему, векторы которой линейно независимы, а любой вектор
системы является их линейной комбинацией.
Для трехмерного пространства
R3 базисом будут:
i (1,0,0)
j (0,1,0)
k (0,0,1) .
Тогда любой вектор (x, y, z) может быть представлен:
= x* i + y* j + z* k
Теорема: Если векторы 1, 2, ….., n принадлежат n-мерному векторному пространству, образуют базис, а вектор b - это произвольный вектор данного пространства, тогда вектор b может
32
33
быть разложен по векторам базиса и, при этом, единственным
образом.
b = 1* 1 + 2* 2 +….. + n*n .
4. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
4.1
Прямая линия на плоскости и в пространстве.
Прямая на плоскости
Пусть на плоскости нам дана некоторая прямая.
Определение: Угол между данной прямой и положительным направлением оси ОХ называется углом наклона данной прямой ().
Определение: Тангенс угла наклона прямой называется угловым коэффициентом данной прямой ( k = tg ).
Уравнение прямой мы получим, если известны:
- ее угловой коэффициент
и
- величина отрезка, который прямая отсекает от оси OY
M(x,y)
O
C
b
B
N
B =
из треугольника находим: tg = MN/BN = k
Рассмотрим отрезки MN и BN:
MN=y-b BN=x
(y-b)/x=k
откуда
y=k*x+b - уравнение прямой с угловым коэффициентом.
MN=MC+CN
4.1.1 Уравнение прямой, проходящей через данную точку,
с данным угловым коэффициентом
Дано: y=k*x+b - уравнение прямой.
M(x1,y1) – точка на данной
прямой.
Поскольку x1,y1 – координаты точки на прямой - y1 = k * x1 + b :
b = y1 - k * x1 .
Подставив данное соотношение в уравнение прямой получим:
y = k*x + y1 - k * x1 или
y - y1= k*(x - x1) - уравнение прямой,
проходящей через данную точку и имеющей
угловой коэффициент “k”.
33
34
4.1.2 Уравнение прямой, проходящей через две данные точки
M2(x2,y2) – две точки, через которые проходит заданная
прямая
y=k*x+b.
M1(x1,y1)
y1 = k * x1 + b
y2 = k * x2 + b
y = k*x + y1 - k * x1
y = k*x + y2 - k * x2
k*x + y1 - k * x1 = k*x + y2 - k * x2
y1 - k * x1 = y2 - k * x2
откуда:
y2 - y1 = k * ( x2 - x1 )
Угловой коэффициент равен
k=(y2-y1)/(x2-x1)
При условии, что y2 y1 и x2 x1 данное уравнение можно
запи-
сать в следующем виде:
(y – y1)/(y2 – y1) = (x – x1)/(x2 – x1)
4.1.3 Уравнение прямой, проходящей через две данные точки,
если y1=y2
y = y1
4.1.4 Уравнение прямой, проходящей через две данные точки,
если x1=x2
x = x1
4.1.5 Угол между двумя прямыми
Y
l2
l1
1 2
X
Пусть заданы две прямые:
l 1 : y = k 1 * x + b1 ;
l 2 : y = k 2 * x + b2 ;
= (l1,l2) , = 2 - 1
0 /2
tg = tg (2 - 1 ) =
= (tg 2 – tg 1 )/(1 + tg 1 * tg 2 )=
= (k2 – k1 )/(1 + k1 * k2 )
Знак модуля необходим для случая, когда тупой.
= arctg ((k2 – k1 )/(1 + k1 * k2 ) )
4.1.6 Условия параллельности и перпендикулярности двух прямых
Пусть даны две прямые:
l1 : y = k 1 * x + b1
l2 : y = k 2 * x + b2
34
35
1) l1 l2
тогда угол между прямыми = 0 и tg =0, а следовательно:
(k2 – k1 )/(1 + k1 * k2 ) = 0
откуда:
(k2 – k1 )= 0, т.е. k2 = k1 ;
l1 l2
k2 = k1
2) l1 l2
т.о.
тогда угол между прямыми = 900 и tg - не существует
откуда
(1 + k1 * k2 ) = 0 ,
l1 l2
k1 = - 1/k2 ;
k1 * k2 = 1
4.1.7 Общее уравнение прямой
Теорема: Любая прямая на плоскости есть множество точек, координаты
которых удовлетворяют соотношению:
A*x+B*y+C = 0
где A, B и C - числа, которые все одновременно не равны 0.
Данное уравнение называют общим уравнением прямой:
A*x+B*y+C =0
(1)
Доказательство: Известно, что если прямая не перпендикулярна OX, то ее
уравнение можно записать как уравнение прямой с угловым коэффициентом “k”.
Преобразовав уравнение
A*x+B*y+C=0
легко показать, что это уравнение задает на плоскости прямую:
y = - (A/B)*x – C/B, а это уравнение прямой с
угловым коэффициентом,
где : k = - (A/B); b = – C/B
что и требовалось доказать.
4.1.8 Частные случаи общего уравнения прямой
1) Если в общем уравнении коэффициент С=0,
то прямая проходит через O(0,0).
2) Если в общем уравнении коэффициент А=0,
то прямая параллельна оси OX.
3) Если в общем уравнении коэффициент В=0,
то прямая параллельна оси OY.
4) Если в общем уравнении коэффициенты А=С=0,
то это уравнение оси OX.
5) Если в общем уравнении коэффициенты В=С=0,
то это уравнение оси OY.
4.1.9 Уравнение прямой на плоскости в отрезках
Пусть дана прямая линия
Преобразуем данное уравнение:
l: A*x + B*y + C = 0
35
36
A*x + B*y = - C ,
(A/-C)*x + (B/-C)*y = 1,
откуда
- уравнение прямой в отрезках,
где a = - C/A
b = - C/B.
Модули коэффициентов a и b равны длинам отрезков, которые
отсекает прямая на осях.
x/a + y/b = 1
4.1.10
Расстояние от точки до прямой
Даны: прямая A*x + B*y + C = 0
и точка M(x1,y1), не принадлежащая прямой
M(x1,y1)
Тогда расстояние от точки до прямой
d = | A*x1 + B*y1 + C|/ A2 + B2
d
Знак модуля необходим, поскольку выражение A*x1 + B*y1 + C может дать отрицательный результат, а расстояние может быть только положительным.
4.2
Уравнение плоскости в пространстве
Пусть в пространстве задана произвольная плоскость , которая
проходит через точку M0(x0,y0,z0)
при этом N=(A,B,C) – нормальный вектор, т.е. ненулевой вектор, перпендикулярный плоскости.
Z
Через некоторую точку, перпендикулярную
заданному вектору, можно провести плоскость единственным образом:
М0
N
M
0
Y
A*(x-x0) + B*(y-y0) + C*(z-z0) = 0
либо:
X
A*x + B*y + C*z + D = 0,
где: D = - A*x0 - B*y0 - C*z0
Данное уравнение является общим уравнением плоскости в пространстве.
Доказательство: Пусть M(x,y,z) - произвольная точка плоскости.
тогда
M0M N
M
M0M = (x-x0, y-y0, z-z0) и
M0M*N = 0
A*(x-x0)+B*(y-y0)+C*(z-z0)=0
4.2.1 Угол между плоскостями
Пусть даны 2 плоскости
:
A1*x + B1*y + C1*z + D1 = 0
:
A2*x + B2*y + C2*z + D2 = 0
36
37
= (, ) = (N1, N2)
N1 =( A1,B1,C1);
Из скалярного произведения векторов:
N2 =( A2,B2,C2);
cos = (N1*N2) / N1 *N2 =
= (A1*A2+B1*B2+C1*C2) / ( A12 +B12 +C12) * ( A22 +B22 +C22)
4.2.2 Условия
параллельности и перпендикулярности 2-х плоскостей
1) . Две плоскости параллельны тогда и только тогда когда равны отношения
соответствующих координат их нормальных
векторов и эти отношения не равны отношениям свободных членов (именно не равны, так как в противном случае плоскости будут не параллельными, а совпадающими в пространстве).
N1N2
A1 / A2 = B1 / B2 = C1 / C2 D1 / D2
2) Пусть
N1 N2
N1 * N2 = 0, т.о. A1 *A2 + B1 * B2 + C1 * C2 = 0
Две плоскости перпендикулярны тогда и только тогда когда скалярное произведение их нормальных векторов равно нулю.
4.2.3 Расстояние от плоскости до точки
: A1*x + B1*y + C1*z + D1 = 0 – плоскость; M(x1,y1,z1) – точка.
Тогда расстояние от точки до плоскости:
M(x1,y1,z1)
|A1*x1 + B1*y1 + C1*z1 + D1 |
d
d=
(A12 + B12 + C12 )
Знак модуля необходим, поскольку
выражение A1*x1 + B1*y1 + C1*z1 + D1
может дать отрицательный результат,
а расстояние положительная величина.
4.2.4 Уравнение плоскости, проходящей через 3 заданные точки.
Даны точки: M1(x1,y1,z1) ; M2(x2,y2,z2) ; M3(x3,y3,z3) ; Все эти точки лежат в одной плоскости.
Пусть M(x,y,z) – некоторая точка этой же плоскости.
Построим три вектора:
M2
M3
M1
M
M1M = (x-x1 ; y-y1 ; z-z1 )
M1M2 = (x2-x1 ; y2-y1 ; z2-z1 )
M1M3 = (x3-x1 ; y3-y1 ; z3-z1)
37
38
Поскольку все три вектора лежат в одной плоскости, то они компланарны. Так как векторы компланарны, то
M1M * M1M2 * M1M3 = 0
Данное соотношение и определяет уравнение плоскости, проходящей через три данные точки.
x-x1
x2-x1
x3-x1
y-y1
y2-y1
y3-y1
4.3
z-z1
z2-z1
z3-z1
уравнение плоскости,
проходящей через
3 заданные точки
= 0
Прямая линия в пространстве
4.3.1 Параметрическое уравнение прямой в пространстве и
каноническое уравнение прямой в пространстве
Рассмотрим в пространстве прямую “l”
l
M
S
M1
M1(x1,y1,z1) l,
S l ,
S = (m,n,p)
Вектор S - направляющий вектор прямой.
Пусть M(x,y,z) – некоторая точка прямой. Тогда M1M = (x-x1 ; y-y1 ; z-z1 )
т.к. M1MS ,
имеем:
(x-x1) / m = (y-y1 ) / n = (z-z1 ) / k = t - каноническое уравнение
прямой в пространстве.
(x-x1) = m*t
(y-y1) = n*t
(z-z1) = k*t
;
x = x1 + m*t
y = y1 + n*t
z = z1 + k*t
- параметрические
уравнения/
4.3.2 Уравнение прямой в пространстве, проходящей через 2
заданные точки
Даны: M1(x1,y1,z1); M2(x2,y2,z2) – принадлежащие прямой l
l
M2
M1
S = M1M2 = (x2-x1 ; y2-y1 ; z2-z1 )
Тогда
- уравнение
прямой, проходящей через
две заданные точки.
(x-x1) / (x2-x1) = (y-y1 ) / (y2-y1) = (z-z1 ) / (z2-z1)
38
39
4.3.3 Прямая, как линия пересечения двух плоскостей
Пусть две плоскости пересекаются по прямой.
:
A1*x + B1*y + C1*z + D1 = 0
:
A2*x + B2*y + C2*z + D2 = 0
= l – прямая линия
Имеем
l:
A1*x + B1*y + C1*z + D1 = 0
A2*x + B2*y + C2*z + D2 = 0
l
N1
- общее уравнение прямой
в пространстве.
S
N2
Если две плоскости пересекаются по одной прямой, то
S = N1 x N2
Направляющий вектор этой прямой линии равен векторному произведению нормальных векторов обоих плоскостей.
4.3.4 Условие параллельности и перпендикулярности двух
прямых
Пусть в пространстве заданы прямые:
(x – x1)
l1:
(y – y1)
=
(z – z1)
=
m1
n1
p1
(x – x2)
(y – y2)
(z – z2)
l2:
=
m2
=
n2
p2
1) l1l2
S1S2 M1M2
m1/m2 = n1/n2 = p1/p2 ,
где M1(x1 ,y1,z1), M2(x2,y2,z2) точки на прямых. Прямые не совпадают, иначе
их, строго говоря, нельзя назвать параллельными.
2) l1 l2
S1 S2
S1 * S2 = 0 , т.е. m1*m2 + n1*n2 + p1*p2 = 0
39
40
4.3.5 Угол между двумя прямыми
= ( l1, l2 ) = (S1, S2)
cos = (S1*S2) / S1 *S2 =
= (m1*m2+n1*n2+p1*p2) / ( ( m12 +n12 +p12) * ( m22 +n22 +p22) )
4.3.6 Угол между прямой и плоскостью.
Условия параллельности и перпендикулярности прямой и
плоскости
Пусть дана прямая l и плоскость
(x – x1)
l:
(y – y1)
=
m
:
(z – z1)
=
n
p
A*x + B*y + C*z + D = 0
= ( , l )
0
(90 -) = (N, S )
cos(900 - ) = sin = |A*m+B*n+C*p| / (( A2 +B2 +C2) * ( m2 +n2 +p2) ) ,
где N = (A, B, C),
S = (m,n,p)
Знак модуля позволяет распространить выражение на случай тупого угла.
1) Пусть прямая l параллельна плоскости :
NS
l
N *S = A*m + B*n + C*p = 0
A*x1 +B*y1 +C*z1 +D 0
M1(x1 ,y1,z1) – точка на прямой.
N
l
Второе условие исключает вариант
расположения прямой на плоскости.
Точка M1(x1 ,y1,z1) не принадлежит
плоскости. Прямая не в плоскости.
S
2) Пусть прямая l перпендикулярна плоскости : l
NS
l
N
NS
A/m = B/n = C/p
S
40
41
4.4
Кривые второго порядка на плоскости
Определение: Окружностью называют множество точек плоскости равноудаленных от данной точки, называемой центром, на заданное
расстояние, называемое радиусом окружности.
Y
(x – a)2 + (y – b)2 = R2 - уравнение окружности
R
a
0
O
где O(a,b) – координаты центра окружности.
X
R
- радиус окружности.
b
Определение: Эллипсом называют множество точек плоскости, сумма расстояний каждой из которых до двух точек, называемых фокусами эллипса, есть величина постоянная и большая, чем расстояние между фокусами.
Уравнение эллипса:
Y
B1 b
x2/a2 + y2/b2 = 1
A1, A2, B1, B2 – вершины эллипса
отрезок A1A2 – большая ось эллипса.
OA2 – большая полуось эллипса.
B1B2 –малая ось эллипса
OВ1 – малая полуось эллипса.
F1, F2 – фокусы эллипса.
M
A1 F1
F2 A2 X
-a
-c O +c a
B2 -b
F1M, F2M – фокальные радиусы.
По определению
F1M + F2M = 2*a > F1F2 = 2*c
2*a > 2*c
b2 = a2 – c2
c = F1F2 / 2
Эксцентриситетом эллипса называют отношение величины с к величине а
= c/a < 1
Определение: Гиперболой называют множество точек плоскости, абсолютная величина разности расстояний от каждой из которых до
2-х заданных точек, называемых фокусами, есть величина постоянная, меньшая, чем расстояние между фокусами.
x2
y2
a
2
=1
- уравнение гиперболы.
2
b
41
42
Y
M
-a
F1
A1
B1
b
A1, A2 – вершины гиперболы
A1A2 - действительная ось
гиперболы
B1B2 - мнимая ось гиперболы.
F1, F2 - фокусы гиперболы.
a
F2
B2 b
A2
X
F1M – F2M = 2*a < F1F2 = 2*c ,
b2 = c2 – a2 ,
= c/a > 1
эксцентриситет
Определение: Параболой называют множество точек плоскости, каждая
из которых находится на одинаковом расстоянии от некоторой
точки, называемой фокусом и от заданной прямой, называемой
директрисой.
Y
FM = FN
F(p/2,0)
– фокус параболы
x = -p/2
–директриса
p/2
0
F
+ p/2
X
Уравнение параболы:
y2 = 2*p*x ,
N
M
где p – параметр параболы.
42
43
СОДЕРЖАНИЕ
1. ОСНОВНЫЕ МАТЕМАТИЧЕСКИЕ ПОНЯТИЯ И ОБОЗНАЧЕНИЯ. .. 3
1.1 Множества чисел и их обозначения. ..................................................... 3
1.2 Основные операции над множествами. ................................................ 4
1.3 Логические символы. .............................................................................. 4
1.4 Специальные математические символы. .............................................. 4
2. ЛИНЕЙНАЯ АЛГЕБРА. ............................................................................... 5
2.1 Определители и их свойства. ................................................................. 5
1.2 Свойства определителей. ....................................................................... 6
1.3 Матрицы и их свойства. ......................................................................... 9
1.4 Операции над матрицами. ...................................................................... 9
1.5 Экономическая интерпретация действий над матрицами. ............... 11
1.6 Системы линейных уравнений. ........................................................... 12
1.7 Решение систем линейных уравнений
при помощи формул Крамера. ............................................................. 13
1.8 Решение систем линейных уравнений матричным способом. ......... 14
2.9 Линейные системы общего вида. ........................................................ 15
2.10 Решение систем линейных уравнений методом Гаусса. ................... 18
2.11 Экономическая интерпретация систем линейных уравнений.......... 20
3. ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ. ................................................... 21
3.1 Основные понятия. ............................................................................... 21
3.2 Действия над векторами. ...................................................................... 21
3.3 Свойства действий над векторами. ..................................................... 22
3.4 Проекция вектора на ось. ..................................................................... 22
3.5 Координаты точки на числовой оси
на плоскости и в пространстве. .......................................................... 23
3.6 Теоремы о проекции вектора на ось. .................................................. 24
3.7 Длина вектора. Направляющие косинусы вектора............................ 25
3.8 Понятие базиса. Разложение вектора по базису. ............................... 26
3.9 Скалярное произведение векторов. ..................................................... 27
3.9.1 Свойства скалярного произведения. .............................................. 27
3.9.2 Следствия из Свойств скалярного произведения. ........................ 27
3.9.3 Скалярные произведения векторов через координаты. ............... 27
3.10 Векторное произведение двух векторов. ............................................ 28
3.11 Смешанное произведение векторов. ................................................... 29
3.11.1 Свойства смешанного произведения. ............................................ 30
3.12 Геометрический смысл смешанного произведения векторов. ......... 30
3.13 N-мерные векторы ................................................................................ 31
3.14 Линейная зависимость (независимость) системы векторов. ............ 32
3.15 Разложение вектора по некоторому базису........................................ 32
4. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙОЙ ГЕОМЕТРИИ............................. 33
4.1 Прямая линия на плоскости и в пространстве.
Прямая на плоскости. ........................................................................... 33
43
44
4.1.1 Уравнение прямой, проходящей через данную точку, с данным
угловым коэффициентом. ........................................................................... 33
4.1.2 Уравнение прямой, проходящей через две данные точки. .......... 34
4.1.3 Уравнение прямой, проходящей через две данные точки,
если y1=y2. ......................................................................................... 34
4.1.4 Уравнение прямой, проходящей через две данные точки,
если x1=x2. ......................................................................................... 34
4.1.5. Угол между двумя прямыми. .......................................................... 34
4.1.6 Условия параллельности и перпендикулярности
двух прямых...................................................................................... 34
4.1.7 Общее уравнение прямой. ............................................................... 35
4.1.8 Частные случаи общего уравнения прямой. ................................. 35
4.1.9 Уравнение прямой на плоскости в отрезках. ................................ 35
4.1.10 Расстояние от точки до прямой. ..................................................... 36
4.2 Уравнение плоскости в пространстве. ................................................ 36
4.2.1 Угол между плоскостями. ............................................................... 36
4.2.2 Условия параллельности и перпендикулярности
2-х плоскостей. ................................................................................. 37
4.2.3 Расстояние от плоскости до точки. ................................................ 37
4.2.4 Уравнение плоскости, проходящей через 3 заданные точки. ..... 37
4.3 Прямая линия в пространстве. ............................................................. 38
4.3.1 Параметрическое уравнение прямой в пространстве и
каноническое уравнение прямой в пространстве. ................................... 38
4.3.2 Уравнение прямой в пространстве, проходящей через 2
заданные точки. ........................................................................................... 38
4.3.3 Прямая, как линия пересечения двух плоскостей ........................ 39
4.3.4 Условие параллельности и перпендикулярности двух прямых. . 39
4.3.5 Угол между двумя прямыми. .......................................................... 40
4.3.6 Угол между прямой и плоскостью. Условия
параллельности и перпендикулярности прямой и плоскости. .... 40
4.4 Кривые второго порядка на плоскости. .............................................. 41
44