word/doc, 2 Mb
реклама

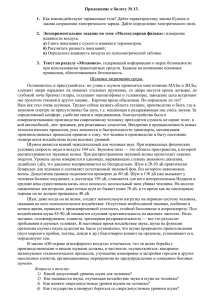
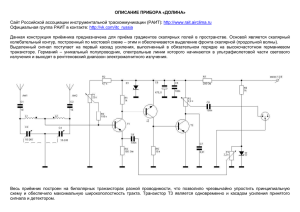
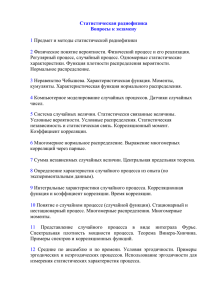
1 КОМПЛЕМЕНТАРНАЯ МНОГОКРАТНАЯ ЭМПИРИЧЕСКАЯ ДЕКОМПОЗИЦИЯ: НОВЫЙ ШУМ РАСШИРИЛ МЕТОД АНАЛИЗА ДАННЫХ Частично редактированный машинный перевод. Преобразование Гильберта-Хуанга: http://prodav.narod.ru/hht/index.html Явление смешивания модовых функций, вызванное сигналами прерывистости, является раздражающей проблемой в методе Эмпирической Модовой Декомпозиции (EMD). Но шум, помогающий EMD эффективно решить эту проблему (метод EEMD), генерировал также новый остаток, который влияет на реконструкцию сигнала. Конечно, относительную величину остаточного щума можно сделать несущественной большой кратностью процесса, но это будет слишком трудоёмким для осуществления. В работе предложен улучшенный алгоритм расширенного метода анализа данных с внесением дополнительного шума. В этом подходе остаток добавленных белых шумов может быть извлечен из смесей данных и белых шумов через пары дополнительного множества IMFs с положительными и отрицательными значениями добавленного белого шума. Этот новый метод дает IMF с RMS, аналогичным EEMD, но он эффективно устранил шум остатка в IMF. Проведены численные эксперименты, демонстрирующие новый подход, и также поясняющие задачи разбиения мод и трансляции. 1. Введение EMD [Huang и др. (1998)] является адаптивным частотно-временным методом анализа данных, разработанным для анализа нелинейных и нестационарных сигналов. Применительно к единообразно распределенному белому сигналу шума, EMD оказался бинарным банком фильтра [Flandrin и др. (2004); Wu и Huang (2004)]. Как есть, EMD использован для широкого ряда приложений, покрывающего проектирование, науки и даже финансовые данные. Однако в первоначально предложенном EMD есть серьезный недостаток: смешивание модовых функций, где широко несоизмеримые масштабы могли появиться в одной модовой функции компонента (IMF). Или, из другого вида последствий, фрагментирование когерентного сигнала и появление разделенными частями в более, чем одном компоненте IMF. Для того чтобы иметь дело с проблемой смешивания мод, алгоритм теста субъективной прерывистости предложен Huang и др. [1999]. Недостатки этого подхода были обсуждены детально Wu и Huang [2009], когда они предложили многократное EMD (EEMD), которое по существу решало проблему смешивания мод путем использования с EMD добавленных шумов. Добавление шумов к сигналу, который будет разложен, не ново. Gledhill [2003] сначала применял шум, чтобы исследовать эффект суммирующего шума как средство для контрольной устойчивости EMD. Он сделал критическое предположение, что истинная декомпозиция - следствие первоначальных данных без любого добавленного шума. В отличие от этого представления, Wu и Huang [2009] предложили, чтобы истинная декомпозиция была пределом, когда номер множества приближается к бесконечности. Несомненно, EEMD - прорыв в разработке EMD алгоритма, и работает хорошо, чтобы увеличить стабильность алгоритма EMD. Практика, однако, ограничивала количество циклов, который можно было использовать в многократном EMD; поэтому, IMFs, выведенные при EEMD, неизбежно было бы заражено добавленным шумом особенно, когда количество циклов EMD было относительно низким. Это особенно истинно при восстановлении сигнала из компонентов IMF. В этой работе мы предложили новый шум, расширивший алгоритм, чтобы улучшать эффективность оригинального шума, помогшего алгоритму EEMD, используя каждый шум в парах с плюс и минус знаком. Вопреки требованию EEMD по независимым и идентично распределенным шумам (IID), настоящее спаривание шумов антисогласовано. У преимущества для этого нового подхода, однако, должна быть точная отмена остаточного шума на восстановлении сигнала. Мы определяем этот новый подход как Комплементарная (дополнительная) EEMD (CEEMD). Поскольку отлично коррелированный шум прямо не способствовал бы приведению RMS статистики, можно было бы все 2 еще нуждаться в том же самом номере множества, чтобы достигнуть желательного терпимого уровня RMS шума в анализируемых результатах. Остальная часть этой работы организована следующим образом. Раздел 2 дает алгоритм CEEMD, который сопровождается численными экспериментами, чтобы проверить эффективность нового подхода плюс приложение в кровяных данных давления в разделе 3. заключение и обсуждение будут даны в финальном разделе. 2. Алгоритм CEEMD 2.1. Алгоритм EMD Эмпирическая Декомпозиция (EMD) является адаптивным методом, чтобы удалить колебание последовательно через повторенное вычитание средств огибающей. Для сигнала x(t), алгоритм EMD состоял следующих шагов: 1. Соединение последовательных локальных максимумов (соответствующих минимумов) кубическим сплайном для получения верхней (соответствующий нижней) огибающих. Выведите медиану огибающей, m(t), как среднего верхней и нижней огибающей. 2. Извлеките временное локальное колебание h(t) = x(t) − m(t). 3. Повторение шагов (1) – (3) на временном локальном колебании h(t) до приближения m(t) к нулю. Тогда, h(t) - IMF, отмечаемый как c(t). 4. Вычислите остаток r(t) = x(t) − c(t). 5. Повторение шагов от (1) до (5) с использованием r(t) вместо x(t), для генерирования следующей IMF и остатка. Поэтому, первоначальный сигнал x(t) может быть реконструирован следующей формулой: где ci(t) является i-ым IMF (то есть локальное колебание), и rn(t) - энный остаток (то есть локальная тенденция). При использовании алгоритма всех локальный extrema для создания огибающих, смешивание мод неизбежно, когда сигнал содержит прерывистые процессы. Как обсуждается Wu и Huang [2009], прерывистость заставляет следующие истинные материальные процессы быть затемненными фрагментацией данного сигнала. 2.2. Шум помогает методу EEMD EEMD - следующий этап в разработке алгоритма EMD, предложенный Wu и Huang [2009]. Они использовали то, что белый шум может обеспечить единообразно распределенную шкалу в частотновременном пространстве. Существенная осцилляция на сигнале с другими весами должна автоматически соединяться с аналогичными весами исходных gridings, предусмотренными белым шумом. Поэтому, встроенные локальные колебания, соединенные с добавленным равномерно распределенным белым шумом, могут быть отфильтрованы адаптивно к присущим масштабам через естественную группу фильтров EMD. Проблема смешивания мод решена через это изящное использование шума. Остаток добавленных белых шумов должен уменьшаться по известному статистическому правилу: где N - количество циклов, которым выводятся множества IMFs, ε является RMS амплитудой добавленных шумов, и εn - финальное среднеквадратичное значение погрешности, которая определяется как разность между первоначальными данными и реконструированными данными через множество IMFs и остаток EEMD. Чтобы пояснять задачу смешивания мод, вызванного прерывистыми процессами, использовалось численное моделирование. В эксперименте моделируемый сигнал содержит три волны синусоид, имеющих различные начальные фазы, амплитуды и частоты, и прерывистый сигнал. Главные компоненты моделируемого сигнала даны как: 3 Рис. 1. Компоненты моделируемого сигнала, который содержит три синусоиды и моделируемую прерывистую турбулентность. Рис. 2. Моделируемый сигнал и IMFs EMD. Здесь, смешение мод случайно встречает периоды времени, в то время как появляется моделируемая турбулентность. Кроме того, прерывистые разделы стохастического сигнала с нулевым средним значением появляют- 4 ся в разных точках времени. Волны синусоид и прерывистой турбулентности моделируемых сигналов показаны на рис. 1. Моделируемый сигнал анализировался EMD, результаты показаны на рис. 2. Ясно, много частей IMF1 были заменены прерывистым сигналом. Замененные части IMF1 сдвинуты к IMF2 и вызывают явление смешивания мод во втором и в последующих IMFs. Этот результат поясняет проблему смешивания мод, вызванную прерывистой турбулентностью, как подробно обсуждают Wu и Huang [2009]. Рис. 3. IMFs моделируемого сигнала, анализируемый EEMD. Тот же самый моделируемый сигнал, анализируемый EEMD с количеством циклов1000 и RMS шумов, подобных прерывистому сигналу, преобразован в IMFs и показан на рис. 3. Здесь, IMF1 показал смесь прерывистых сигналов, загрязненных в определенной степени добавленным шумом; IMF 2–4 восстановил синусоидальные волны как в оригинале, составляющие компоненты моделируемого сигнала. Этот результат доказывал эффективность EEMD для решения проблемы смешивания мод. Остаток добавленного белого шума может быть определен разностью между оригиналом и реконструированными сигналами. Реконструированный сигнал - сумма всего IMFs и остатка в EEMD. Теперь представим новый CEEMD. 2.3. Новый шум расширил метод CEEMD В новом CEEMD белый шум добавлен в парах к первоначальным данным (то есть одно позитивное и одно негативное (позитивной, инвертированный по знаку)), чтобы генерировать два множества IMFs. Поэтому, мы можем вывести две смеси, составленные из первоначальных данных и добавленного шума где S - первоначальные данные; N - добавленный белый шум; M1 - сумма первоначальных данных с позитивным шумом, и M2 - сумма первоначальных данных с негативным шумом. Тогда, множество IMFs, полученное из позитивных смесей, порождает ряды IMFs с позитивными остатками добавленных белых шумов. Точно так же множество IMFs, полученных из негативных смесей, порождает другое множество IMFs с отрицательными остатками добавленных белых шумов. Таким образом, финальное IMF- множество IMFs с позитивными и отрицательными шумами. 5 Рис. 4. IMFs моделируемого сигнала, анализируемый CEEMD. Рис. 4 показывает IMFs от моделируемого сигнала, с использованием 20 пар добавленных белых шумов. Через CEEMD мы также получили четыре IMF, которые являются подобными произведенным EEMD. IMF1 снова показывает смесь прерывистого сигнала с добавлением некоторого остатка белых шумов, IMF 2–4 являются компонентами волн синусоид моделируемого сигнала. Рис. 5. Остатки добавленных белых шумов, выведенных EEMD и CEEMD. Визуальное сравнение результатов EEMD и CEEMD не показывает значимых различий между модами. Однако, есть значимые различия между реконструированными через IMFs сигналами и первоначальным сигналом. Остатки, выведенные из EEMD и CEEMD, определенные как разность между оригиналом и реконструированными сигналами, очень различны и показаны на рис. 5. В то время как у остатка от EEMD есть средняя амплитуда приблизительно 0.03, у соответствующего остатка от CEEMD средняя амплитуда близка к 0 (порядка 10−15). Такая погрешность может быть приписана числовой ошибке генерации в вычислениях. Таким образом, CEEMD может улучшить результаты декомпозиции, устраняя остаток добавленного белого шума. 2.4.Преимущества CEEMD Сравнивая результаты CEEMD с таковыми из EEMD, мы можем заключить, что может быть значительная экономия времени, если беспокоит восстановление финального результата, потому что парные 6 шумы эффективно ликвидируют остаток белого шума. Как доказательство этого преимущества CEEMD, мы провели численный эксперимент. В этом численном эксперименте использовались различная мощность (от 100.2 до 104) добавленных белых шумов, чтобы оценить остаток добавленных белых шумов, выраженных в процентах. Результаты нашего эксперимента, которые показаны на рис. 6, указывают, что для EEMD, как ожидалось, остаток зависит от элементов во множестве,. В отличие от EEMD, CEEMD может устранить остаток добавленных белых шумов полностью независимо от того, сколько шумов использовалось. Рис. 6. Корреляция между количеством и остатками добавленных белых шумов в EEMD и CEEMD. Кроме устранения остаточного шума, действия EEMD и CEEMD сопоставимы в терминах RMS погрешностей для каждого IMF. Таблица 1 суммирует результаты среднеквадратических погрешностей каждых доминирующих компонентов и остатка добавленных белых шумов в этом испытании. Конечно, большое значение RMS погрешности указывает значимое различие между анализируемым и первоначальными компонентами, и, следовательно, неполную производительность декомпозиции. Согласно результатам, которым показывают в Таблице 1, у EEMD и CEEMD есть подобные действия в декомпозиции единственного компонента, когда использовался тот же самый белый шум. Таблица 1. Остаток добавленных белых шумов и погрешностей среднего квадратичного процента (PMSE) между первоначальными компонентами/и в IMFs EEMD и CEEMD, использующие различное количество добавленных белых шумов. Замечание: остаток добавленного белого шума показан как отношение между энергетическими плотностями остатка и добавленного белого шума. Среднеквадратическая погрешность показана в процентах коррелированный к RMS энергии компонента. Количество добавленных белых шумов, используемых в CEEMD, является половиной из используемого в EEMD, чтобы иметь сравнения в том же масштабе вы- 7 числений. 3. Изучение эффективности встроенного шума К настоящему времени хорошо установлено, что в EEMD и недавно предложенном CEEMD, шум может помочь нам извлекать полезную информацию из данных. Неисследованный эффект встроенного шума, шума, содержащегося в данных. Необходимо исследование того, как существующий в данных шум взаимодействует с добавленным шумом. Это сложная задача, требующая обширных изучений. Здесь, мы только сделаем ограниченное испытание в двух численных экспериментах, чтобы подсветить задачу, но не решение. Ограниченная цель здесь состоит в том, чтобы исследовать корреляции среди встроенного шума, прибавляя шумовые и доминирующие компоненты сигнала. Доминирующие компоненты спроектированы так, чтобы быть главной информацией, содержащей часть сигнала. Испытание сообщает о составе известного доминирующего компонента и встроенного шума. Чтобы управлять энергетическим уровнем встроенного шума, шум моделируется с предопределенным отношением S/N к полной энергии сигнала, жертвовавшего доминирующими компонентами. Чтобы измерить производительность CEEMD, мы используем когерентность между первоначальными доминирующими компонентами и их передачей IMFs. 3.1. Результаты испытания для численных экспериментов На этом изучении использовались два типа разных сигналов: один моделируемый смешанный регулярный синусоидальный сигнал и другой от биомедицинского эксперимента. 3.1.1. Определение доминирующих компонентов от биомедицинского эксперимента Проверка Монте-Карло является эффективным методом, использованным, чтобы определять характеристики IMF согласно распределения энергетической плотности и их соответствующих средних периодов. При изучении характеристик белого шума Wu и Huang (2004) методом Монте-Карло выявили зависимость между энергетической плотностью и средним периодом. Они предложили метод, чтобы проверить объем информации в наборе данных относительно неизвестного уровня помех. Этот метод испытания дает критерий для определения, какие IMFs от набора данных содержат статистически значимую информацию, и какие IMFs являются просто шумовыми. Здесь, мы будем использовать тот же самый подход. В этом Монте-Карло верификация двух параметрах, энергетической плотности и ее передача, составляли в среднем период, и были определены к характеристикам целенаправленной IMF. Как предложено Wu и Huang [2009], энергетическая плотность и средний период вычислялись следующими уравнениями: где Еn энергетическая плотность энного IMF; Sln T,n - спектр Фурье энной IMF, как функция ln T; T период, и Tn с крышкой - усредненный период энной IMF . В отдельном анализе Flandrin et al. [2004] рекурсивный шум Gaussian (fGn) используя EMD, дистрибутивный график энергетической плотности против их соответствующих средних точек закончившихся прямыми строками с уклоном, отражающим рекурсивную собственность fGn. . 8 Рис. 7. 8 IMFs CEEMD от кровяного давления свиньи с использованием 20 добавленных белых шумов. Однако, распределение энергетической плотности против их соответствующих средних периодов для IMF, разложенных на составные части с нашего экспериментального сигнала, указывает, что сигнал содержит много статистически значимых компонент в зависимости от того, значимый ли тест предлагался Wu и Huang [2009]. В этом анализе используется сигнал кровяного давления свиньи в биомедицинском эксперименте. Первоначальные данные анализировались через CEEMD как показано в рис. 7. Тогда, мы вычислили энергетические плотности и средние периоды IMFs и составили график распределения энергетической плотности против их соответствующих средних периодов как показано в рис. 8. Энергетический график периода плотности/состав в среднем для трех первых IMFs представляет распределение, подобное прямой белого шума, который показан в той же самой фигуре. Поэтому, эти три IMFs были идентифицированы как шумовыми компонентами согласно Wu и Huang [2009]. IMFs 4–8, однако, находятся выше предела значимости для белого шума; поэтому, они идентифицированы как доминирующие компоненты сигнала. Из всех значимых компонентов IMFs 4–7 являются периодическими модовыми функциями, которые отображают главную форму волны сигнала кровяного давления. IMF8 представляет связанный долгопериодный компонент по сравнению с периодом сердечного цикла. Поэтому, главная форма волны кровяного давления свиньи может быть реконструирована через IMFs 4–7, который используется как наш доминирующий сигнал в численном испытании с шумом, которым управляют, следующим образом. 9 Рис. 8. Иллюстрация верификации Монте-Карло. В этой индикации распределение энергетических плотностей против их передачи составляло в среднем периоды для 8 IMFs, анализируемые от кровяного давления свиньи, отмеченных как IMF1- IMF8 курсивом. Прямая и точки, отмеченные как IMF1(w) IMF9(w), представляют распределения 9 IMFs на 2000 моделях белого шума. Чтобы отделить сигнал и шум строго, сумма IMFs 4–7 была выровнена медианным фильтром, чтобы устранить любой стоячие флюктуации от операции EEMD. Следовательно, выровненные доминирующие компоненты кровяного давления свиньи использовались как испытательный сигнал численного эксперимента. Кроме того, мы моделировали естественные шумные компоненты, используя стохастические временные ряды с предопределенным энергетическим масштабом. Этот моделируемый шумовой компонент использовался как встроенный шум, который является отличным от добавленного шума, используемого в EEMD или CEEMD. Чтобы определить энергетический масштаб встроенного шума, сигнал/шум (S/N), было вычислено отношение между энергетическими плотностями главной формы волны (то есть смесь доминирующих компонентов) и встроенного шума. Отношение S/N между главным волновым и встроенным шумом кровяного давления свиньи 94.36 (то есть плотность полной энергии доминирующих компонентов - 194.36 раза больше шумных компонентов). Таким образом, мы решили, что энергетический масштаб встроенного шума для моделируемых сигналов находится в диапазоне отношения S/N от 2 до 5000 (то есть от 6 - 74 децибела), включая отношение S/N экспериментального сигнала (то есть кровяное давление свиньи). 3.1.2. Результаты испытания моделируемых неустановившихся синусоид Доминирующие компоненты, используемые в этом численном эксперименте, моделировались, используя синусоиды с переменными амплитудами и мгновенными частотами. Эти синусоиды могут быть выражены как следующие формулы (7): где xi – i-тый компонента моделируемого сигнала; а - амплитуды компоненты, θ является мгновенной частотой компоненты; φ - угол начальной фазы компоненты; a0 , θ0 , b1 , b2 , φ1 , φ2 , w1 , и w2 являются константами. В основном, моделируемая компонента - синусоида с периодической амплитудной и мгновенной частотой флюктуаций. Амплитуда значения определена a0, а диапазон флюктуаций - b1 . У 10 частоты компоненты также есть значение θ0 и диапазон b2 . φ1 и φ2 углы начальной фазы флюктуаций для амплитуды и частоты компоненты. w1 и w2 - угловые скорости флюктуаций для амплитуды и частоты компоненты. Значениям всех параметров уравнения (7) для двух имитаций компоненты показаны в Таблице 2. Частотно-амплитудно-временные распределения двух моделируемых компонент были выведены преобразованием Гильберта. Временные ряды и частотно-амплитудно-временные распределения показаны в рис. 9. Таблица 2. Значения всех параметров, использованные в двух моделируемых компонентах для второго численного эксперимента 3.2. Моделируемые сигналы с различными встроенными шумами Так как для IMFs, полученных EMD, было доказано удовлетворение условию ортогональности, энергетическая плотность главной формы волны может быть выведена суперпозицией. Поэтому, энергетическая плотность главной формы волны определена как плотность полной энергии этих первоначальных доминирующих компонентов. Встроенные шумы моделировались с использованием стохастических временных рядов, сгенерированных случайным числом генератора MATLAB с предопределенными энергетическими масштабами, которые отражают отношение между энергетическими плотностями встроенной шумовой и главной формы волны сигнала. Сигнал/ относительная шумовая мощность представлен в логарифмической шкале. Иллюстрация 10 показывает моделируемые сигналы кровяного давления свиньи с различными встроенными шумами. Рис. 9. Временные ряды и частотно-амплитудно-временные распределения двух моделируемых компонент. (a, d) - Амплитудно-временные распределения двух компонент. (b, e) - Гистограммы времени двух компонент. (c, f) - Моделируемые временные ряды двух компонент. 11 3.3. Коэффициент корреляции Pearson's и коэффициент корреляции взвешенного Pearson's Коэффициент корреляция Pearson’s (PCC) часто используется, чтобы оценить плотность между двумя сигналами. В этом анализе мы использовали его, чтобы проверять плотность между оригинальным компонентным и соответствующим IMF, вычисленным CEEMD. Соответствующее IMF доминирующего компонента имитированного сигнала определено, так как IMF выполняет самую верхнюю величину PCC в доминирующей компоненте. Кроме того, моделируемые сигналы также имеют несколько доминирующих компонентов, но не выбирают компонент. Значение PCC только отражает плотность между одним компонентом и его соответствующим IMF. Полная плотность между всеми доминирующими компонентами и их передачей IMFs может быть выражена взвешенным PCC. Весовые множители энергетические плотности доминирующих компонентов. Таким образом, взвешенный PCC может быть вычислен следующим уравнением: где Ро - полный PCC; Рi - значение PCC между i-тым доминирующим компонентом и его соответствующим IMF; Ei - энергетическая плотность i-того доминирующего компонента. Рис. 10. Главная форма волны и моделируемые сигналы кровяного давления свиньи с разными встроенными шумами. 4. Результаты численных экспериментов В наших численных экспериментах встроенные шумы моделировались, используя случайные временные ряды с разными энергетическими масштабами. Отношение S/N использовалось, чтобы идентифицировать соотношение встроенного шума к главной форме волны моделируемого сигнала. Имитированные сигналы, содержащие другие существенные шумы с коэффициентом S/N от 2 до 5000 (то есть. 6-74 dB), были разложены на составные части CEEMD, использовавший дополнительные белые шумы с коэффициентом S/N от 2 до 5000. Иллюстрации 11 и 12 показывают результатам взвешенного PCC в двух численных экспериментах. Обе фигуры показывают зоны с соотносительно низкими значениями взвешенного PCC в синих областях. Как показано в рис. 11, когда встроенный шум высок (отношение S/N <200) и добавочный шум меньше чем встроенное шум, взвешенный PCC был бы низок. Это показывает, что больший энергетический масштаб добавленного шума должен использоваться в CEEMD для сигналов с большими встроенными шумами. На контрасте по отношению к CEEMD для сигналов с большим встроенным шумом не мог быть найден никакой оптимальный энергетический масштаб добавленного шума 12 Рис. 11. Результат численного эксперимента с использованием доминирующих компонент кровяного давления свиньи. Значениям взвешенного PCC между доминирующими компонентами и их передачей IMFs показано в цветах. Ось X показывает отношение S/N между доминирующими компонентами моделируемого сигнала и моделируемого встроенного шума. Ось Y показывает отношение S/N между доминирующими компонентами моделируемого сигнала и добавленного шума в CEEMD. Иллюстрация 13 показывает значениям PCC между доминирующими компонентами и их соответствующими IMFs. Иллюстрации 13 (a) & 13 (d) показывают результатам для моделируемого сигнала с низким встроенным масштабом энергии шумов (отношение S/N = 1259); Рис. 13 (b) & 13 (e) показывают результатам для моделируемого сигнала со срединным встроенным масштабом энергии шумов (отношение S/N = 50 децибелов); и Рис. 13 (c) & 13 (f) показывают результатам для моделируемого сигнала с высоким встроенным масштабом энергии шумов (отношение S/N = 79.43). Есть два подграфика - для каждого моделируемого сигнала. Иллюстрация 13 (b) показывает значениям PCC между компонентом моделируемого сигнала со средним встроенным шумом и его соответствующим IMF, и рис. 13 (e) показывает между вторым компонентом и его соответствующим IMF. Согласно результатам, которым показаны в этих двух подграфиках (то есть. Рис. 13 (b) и 13 (e)), у IMF 2 есть высокое значение PCC с моделируемым компонентом сначала, и у IMF 3 есть высоко PCC со вторым моделируемым компонентом со средним встроенным шумом в CEEMD и добавленных белых шумах с отношением S/N> 79.43. Должно быть замечено, что это соответствие не установлено для всего встроенного шума или добавленных уровней энергии шумов. Если моделируемый сигнал со средним встроенным шумом анализируется CEEMD с использованием добавленного шума с отношением S/N = 17, IMF2 соответствует моделируемому первому компоненту (PCC> 0.9) , IMFs 3 & 4 соответствуют второму компоненту (PCC> 0.9). Если моделируемый сигнал со средним встроенным шумом анализируется CEEMD с использованием добавленного шума с отношением S/N = 11, IMFs 2 & 3 соответствуют первому компоненту (PCC> 0.9), а IMF4 соответствует второму компоненту (PCC близко к 1). 13 Рис. 12. Результат второго численного эксперимента, с использованием двух синусоид с модуляцией периодов и амплитуд. Значения взвешенного PCC между доминирующими компонентами и их передачей IMFs показано в цветах. Ось X показывает отношение S/N между доминирующими компонентами моделируемого сигнала и моделируемого встроенного шума. Ось Y показывает отношение S/N между доминирующими компонентами моделируемого сигнала и добавленного шума в CEEMD. Кроме того, когда моделируемый сигнал анализируется CEEMD с использованием добавленного шума с отношением S/N <7.9, IMF3 соответствует первому компоненту, и IMF4 соответствует второму компоненту. Таким образом, мы нашли, что явление трансляции моды связывается с увеличением энергетического масштаба добавленного шума в CEEMD. Это просто понять, поскольку как добавленные увеличения энергии шумов, это было бы по мощности сигнал и производит некоторые искусственные шумовые компоненты, не переписывая значимый сигнал около масштаба. В дополнение к явлению трансляции режима утечки двухместной группы фильтров, как обсуждается в Wu и Huang [2009], могла также вызвать, что одна доминирующая компонента в моделируемом сигнале постоянно находиться в 2 IMFs, или разбиение мод. Вызванное разбиение мод этой утечки становится более серьезным, когда энергетический уровень добавленного шума высок, для выше добавленного шума в EEMD, или CEEMD, вызвал бы больше возмущений и, следовательно, есть больше возможностей для разбиения мод. Как добавленные изменения уровня энергии шумов, шаблон утечки также изменился бы соответственно. Следовательно, разбиение мод единственного сигнала на две компоненты может случиться в непредсказуемых расположениях. К счастью, проверка на ортогональность может определить эти моды. Метод, чтобы исправить это разбиение мод - сложить два смежных неортогональных компонента IMF, чтобы сформировать единственный, как предложено Wu и Huang [2009]. 14 Рис. 13. PCC оценивает между доминирующими компонентами и их передачей IMFs во втором численном эксперименте. (a, d) - Результаты для моделируемого сигнала с низким энергетическим масштабом встроенного шума (отношение S/N = приблизительно в 1259, 62 децибела). (b, e) - Результаты для моделируемого сигнала со средним энергетическим масштабом встроенного шума (отношение S/N = приблизительно 316.23, 50 децибелов). (c, f) - Результаты для моделируемого сигнала с высоким энергетическим масштабом встроенного шума (отношение S/N = приблизительно 79.43, 38 децибелов) В вычислении взвешенного PCC мы полагаем, что у доминирующих компонент есть зависимость взаимно-однозначного отображения их передачи IMFs. Фактически, когда несоответствующе добавленный шум используется в CEEMD, низкие значения взвешенного PCC кажутся в области, что явления трансляции мод и утечки вызвали раскалывание мод. Они - главные причины для зон низких взвешенных значений PCC в Рис. 11 и 12. Иллюстрация 14 показывает значениям PCC между доминирующими компонентами и их передачей IMFs в биомедицинском численном эксперименте. Сигнал моделируется, используя доминирующие компоненты от кровяного давления свиньи и среднего энергетического масштаба с отношением S/N 316.23 (то есть 50 децибелов). По результатам второго численного эксперимента, явление трансляции мод также случается во время увеличения энергетического масштаба добавленного шума. Кроме того, явление трансляции мод случается в пределах более широкого диапазона энергетического масштаба добавленного шума, потому что у естественного сигнала была более широкая полоса частот, чем моделируемые синусоидальные сигналы. Для того, чтобы разъяснять явления трансляции мод и утечки, вызвавшей разбиение мод, имитированный сигнал с существенным шумом коэффициента S/N 316.23 (то есть. 50 dB), был разложен на составные части CEEMD с использованием трех энергетических весов дополнительных шумов. Эти три энергетических масштаба добавленных шумов представляют три местоположения прежде, во время, и после трансляции режима, и утечка вызвала моды, раскалывающиеся как показано на рис. 15. На этой иллюстрации рис. 15 (a) показывает моделируемый сигнал, связанный с двумя доминирующими компонентами и встроенным шумом, и Рис. 15 (b)–15 (d) показывают IMFs 1–4, анализируемый CEEMD, с использованием добавленного шума с разными энергетическими масштабами отношения S/N приблизительно 126, 50 и 12.59 (то есть 42, 34 и 22 децибела). Когда добавленный шум с энергетическим мас- 15 штабом S/N = 126 (то есть 42 децибела) используется в CEEMD, это ясно, что IMF2 является соответствующим IMF для моделируемого компонента 1 и IMF3 для компонента 2. Когда энергетический масштаб добавленного шума возводит отношение S/N в 50 (то есть. 34 децибела), IMF2 также является соответствующим IMF для компоненты 1 как показано в рис. 15 (b), но IMFs 3, и 4 у обоих есть подобный масштаб времени (хотя с разной энергией плотности) к компоненту 2 как показано в рис. 15 (c). Как добавленные повышения уровня энергии шумов, IMF4 постепенно становится единственным соответствующим IMF для компоненты 2 как показано в рис. 15 (d). Но при этом условии, IMFs 2 и 3 у обоих есть тот же самый масштаб времени, поскольку моделировал первую компоненту. Все это случившиеся без твердых правил, чтобы определяться, когда это разделение должно происходить. Поэтому, это не возможно, чтобы выбрать правильный добавленный энергетический уровень, чтобы осуществить или EEMD или CEEMD. Средство должно проверить индекс ортогональности старательно, чтобы определить разбиение и рекомбинировать их по опыту, если какие-нибудь два смежных компонента IMF являются чрезвычайно неортогональными. Кроме того, как показано в случае, изученном здесь с имитированным сигналом, состоящим из энергетической шкалы существенного шума S/N = 316.23 (то есть. 50 dB), Мы можем осуществить расширенный тест пространства параметра для дополнительного шума и искать оптимальный. (a) (b) (c) Рис. 14. PCC оценивает между доминирующими компонентами и их передачей IMFs в численном эксперименте. Сигнал моделируется, используя средний энергетический масштаб встроенного шума (отношение S/N = приблизительно 316.23, 50 децибелов). (a) значения PCC между первым компонентом и его соответствующим IMF(IMF3 или 4). (b) значения PCC между вторым компонентом и его соответствующим IMF(IMF4 или 5). (c) значения PCC между третьим компонентом и его соответствующим IMF(IMF5 или 6). 16 Рис. 15. Иллюстрация явления передачи моды. (a) компоненты и сигнал. Имитация сигнала используется на этой иллюстрации. (b) IMFs 1–4 анализируемый CEEMD использование добавленного шума с энергетическим масштабом S/N = приблизительно 126 (то есть 42 децибела). (c) IMFs 1–4 анализируемый CEEMD использование добавленного шума с энергетическим масштабом S/N = приблизительно 50 (то есть 34 децибела). (d) IMFs 1–4 анализируемый CEEMD использование добавленного шума с энергетическим масштабом S/N = приблизительно 12.59 (то есть 22 децибела). Как показано на рис. 15 (b), энергетический масштаб S/N = 126 (то есть 42 децибела) добавленных шумовых результатов в лучшей производительности (значение взвешенного PCC более высоко), чем другие два подхода с использованием энергетических масштабов с S/N = 50 и 12.59 (то есть 34 и 22 децибела). Это показывает, что соответствующий энергетический масштаб добавленного шума может улучшить производительность CEEMD в доминирующей декомпозиции. Этот подход отнимает слишком много времени, чтобы использоваться; следовательно, это не подход, который мы рекомендовали бы. Есть, однако, общее правило: высокий энергетический уровень добавленного шума обычно вызывает ухудшение высокочастотного компонента и его соответствующего IMF. Вышеупомянутые примеры ясно указывают, что взаимодействие между добавленными белыми шумами и реальными сигналами сложны. Поскольку действительный сигнал может содержать много доминирующих компонентов с разными энергетическими плотностями и встроенными полосами частот, это было бы аппаратно, если не возможно определить соответствующий энергетический масштаб добавленного шума для общих случаев CEEMD. Наш опыт показывает, что энергетический уровень добавленного шума подобный встроенному шуму сигнала является лучшим испытанием относительно CEEMD. 17 5. Обсуждения и Заключение Предложен дополнительный процесс с использованием и позитивного и негативного белого шума, чтобы увеличить эффективность EEMD. Согласно нашим численным моделированиям, в CEEMD полностью удален остаток добавленных белых шумов. Поэтому, если цель состоит в том, чтобы сохранить шум в реконструированном сигнале, CEEMD должен быть привилегированным методом. Наше вычисление, однако, открывает, что RMS уровеня помех сопоставим для EEMD и CEEMD. Поскольку CEEMD может исключить остаточный шум, и это не будет вызывать больше времени вычисления, мы рекомендовали бы CEEMD как стандартную форму EEMD. Мы также провели простой численный эксперимент, чтобы пояснять эффект встроенного шума в EEMD или декомпозиции CEEMD. Наши эксперименты открыли явления трансляции режима (новый IMF будет сгенерирован с увеличением добавленного уровня белого шума), а утечка стимулировала разбиение мод (значимый сигнал постоянно находится больше чем в одном IMF). Оба этих явления могут произойти в непредсказуемых комбинациях существующего и добавленного шума в анализе данных. Также невозможно предсказать, когда и в котором IMFs случились бы эти явления. Хотя полный перебор мог определить оптимальный добавленный уровень белого шума для специальной задачи, этот подход не практичен, потому что это является слишком трудоёмким. Рекомендуемый метод должен провести испытание ортогональности старательно и рекомбинировать смежные неортогональные компоненты в один. Основываясь на нашем опыте, мы достигли следующих общих правил в EEMD и CEEMD: (1) Добавление шума в EEMD может заставить высокочастотную составляющую быть замаскированной, если количество циклов не является достаточно большим. (2) Выше добавленный уровень помех может также вызвать более серьезное разбиение мод. (3) Основываясь на этих наблюдениях, мы рекомендуем, чтобы энергетический уровень добавленного шума был на уровне встроенного шума, если уровень известен. Иначе, попытайтесь не использовать добавленный уровень помех с RMS больше чем 20 % сигнала. Справочная информация Flandrin, P., Rilling, G. and Goncalces, P. (2004). Empirical mode decomposition as a filter bank. IEEE Signal Process. Lett., 11: 112–114. Flandrin, P., Concalves, P. and Rilling, G. (2005). EMD equivalent filter banks, from interpretation to application. Hilbert–Huang Transform: Introduction and Applications, ed. N. E. Huang and S. S. P. Shen, World Scientific, Singapore. Gledhill, R. J. (2003). Methods for Investigating Conformational Change in Biomolecular Simulation. A dissertation for the degree of Doctor of Philosophy at Department of Chemistry, The University of Southampton. Huang, N. E., Shen, Z., Long, S. R., Wu, M. C., Shih, H. H., Zheng, Q., Yen, N. C., Tung, C. C. and Liu, H. H. (1998). The empirical mode decomposition and the Hilbert spectrum for nonlinear and nonstationary time series analysis. Proc. R. Soc. Lond. A, 454: 903–995. Huang, N. E., Shen Z. and Long, R. S. (1999). A new view of nonlinear water waves — the Hilbert spectrum. Ann. Rev. Fluid Mech., 31: 417–457. Huang, N. E., Wu, Z., Long, S. R., Arnold, K. C., Chen, X. and Blank, K. (2009). On instantaneous frequency. Adv. Adapt. Data Anal., 1(2): 177–229. Wu, Z. and Huang, N. E. (2004). A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. Lond. A, 460: 1597–1611. Wu, Z. and Huang, N. E. (2009). Ensemble Empirical Mode Decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal., 1: 1–41. Смотреть в подлиннике:http://geogin.narod.ru\hht\link03\ceemd2010.pdf Примечание: Если Вы использовали этот материал для каких-либо своих нужд и выполнили редактирование перевода, то прошу Вас выслать редактированный текст по E-mail davpro@yandex.ru. С удовольствием заменю на своем сайте нередактированный перевод Вашим с указанием Вашей фамилии и (если разрешите) электронного адреса. А.В.Давыдов.