МЕТОД ОЦЕНКИ СОСТОЯНИЯ ГИДРОАГРЕГАТА Кошеков К.Т., Калантырев П.А. (СКГУ им. М.Козыбаева)
реклама
")
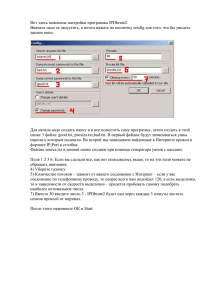
МЕТОД ОЦЕНКИ СОСТОЯНИЯ ГИДРОАГРЕГАТА Кошеков К.Т., Калантырев П.А. (СКГУ им. М.Козыбаева) ГЭС являются важнейшим элементом энергосистемы, поскольку, кроме обеспечения выработки электроэнергии, они осуществляют покрытие пиков нагрузки, выполняют функции регулирования частоты в системе и исполняют роль аварийного резерва. Поэтому необходима высокая надёжность работы основного оборудования ГЭС и особенно гидроагрегатов. Для этой цели должен осуществляться постоянный контроль состояния гидроагрегатов. Задачей контроля является своевременное выявление дефектов оборудования для снижения риска возникновения аварийных ситуаций, продления срока службы агрегатов, снижения затрат на ремонты времени простоя. Для работающих в динамических условиях механических систем (к которым относятся гидроагрегаты) наиболее распространенной и эффективной является методика определения текущего состояния по результатам измерений уровня и спектра вибрации (вибродиагностика [1]). В этом случае анализ вибросигналов производится специализированными программными средствами, учитывающими опыт экспертов данной предметной области. В настоящее время известно несколько десятков методов вибродиагностики гидроагрегатов, однако наиболее эффективными из них являются методы: спектрального анализа [2], анализа специальных диагностических параметров [3,4,5], на основе применения вейвлет-анализа и нейронных сетей. Каждый из указанных методов имеет как определенные преимущества, так и недостатки. Общими недостатками для всех методов являются: неточное определение дефектов и состояний объекта диагностики, сложность в интерпретации результатов, низкая степень унификации и низкая помехозащищенность. Общей особенностью данных методов является то, что они, в той или иной степени, решают задачу классификации - разделение группы объектов на некоторые части подгруппы (кластеры, таксоны), внутри которых объекты имеют общие (в определенном смысле) свойства. Сложность процедуры классификации состоит в том, что, с одной стороны, необходимо объекты разделить на отдельные отличающиеся кластеры, а, с другой стороны, надо сделать так, чтобы в один и тот же кластер попали сигналы, имеющие нечто общее. Возможным решением задачи классификации может стать предложение связать форму распределения мгновенных значений информативного сигнала с текущим состоянием объекта диагностики [6]. Переход объекта из одного состояния в другое индицируется изменением имени распределения мгновенных значений сигнала. Таким образом, происходит автоматическая классификация, при которой число классов группирования зависит от количества эталонных распределений, используемых системой распознавания в качестве реперных точек. Внутри класса объекты упорядочиваются по значению соответствующего идентификационного параметра. Такой подход сегодня развивается в рамках теории идентификационных измерений сигналов (ТИИС) [7]. Для контроля относительной вибрации (биения) ротора гидрогенератора и турбины в подшипниках в наши дни эффективно используется информационно-измерительная система «АЛМАЗ-7010-ГЭС». Измерения проводятся непрерывно на разных режимах. В случае превышения уставок срабатывает сигнализация предупреждения и, при необходимости, автоматический останов гидроагрегата. Программное обеспечение информационно-измерительной системы из-за множества каналов включает сложную базу данных и сигналов (с составляющими спектра) и не предусматривает автоматической классификации сигналов вибрации, что затрудняет принимать объективные решения о состояния гидроагрегата. Для решения данной проблемы был разработан метод распознавания и диагностики состояния гидроагрегата по вибросигналам с применением средств ТИИС. Для создания алгоритма автоматической классификации были использованы реальные изменения параметров (вибросигналов) с датчиков зазора между валом и опорой (рисунок 1) при малом и большом боях (биениях) вала. а) б) в) г) Рисунок 1. Сигналы изменения зазора в районе нижней крестовины (НК): а) датчик №1 – верхний бьеф, малый бой; б) датчик №1 – верхний бьеф, большой бой; в) датчик №2 – правый берег, малый бой; б) датчик №2 – правый берег, большой бой. Датчики расположены под 90 градусов в плоскости, перпендикулярной валу в районе нижней крестовины генераторного подшипника гидроагрегата. Датчик №1 располагается на стороне «Верхнего бьефа» - ВБ (место высокого уровня воды), датчик №2 устанавливается со стороны «Правого берега реки» - ПБ. В соответствие с этой методикой диагностические признаки формируются непосредственно из анализа численных оценок идентификационных параметров сигналов. Методика реализуется в 2 этапа. На первом этапе формируются эталонные вибросигналы, характеризующие различные состояния диагностируемого объекта (этап обучения). Это могут быть сигналы, соответствующие, по мнению экспертов, определенным качественным состояниям объекта диагностики. Для этих сигналов (и их производных) измеряются идентификационные параметры, например, NF1 и NF2. Создается база данных (БД) (например, в среде EXCEL, таблица 1), объединяющая имена эталонных сигналов (FileName), наименования анализируемых характеристик (Graph, временная – Time, вероятностная – Histogram), значения идентификационных параметров формы сигналов (NF1) и формы приращений (NF2), а также вариабельности (K). В графе Chart помещаются качественные характеристики, назначенные экспертами. Таблица 1 База данных идентификационных параметров № FileName Graph NF1 NF2 K 1 C:\Temp\GA 1 Signal NGP (verh.bief - mal.boy).txt Time 22,74974 55,66037 0,266889 2 C:\Temp\ GA 1 Signal NGP (prav.bereg- mal.boy).txt Time 19,98309 46,05929 0,217359 3 C:\Temp\ GA 1 Signal NGP (verh.bief - bol.boy).txt Time 20,85404 37,8689 0,336685 4 C:\Temp\\ GA 1 Signal NGP (prav.bereg- bol.boy).txt Time 26,97174 39,1818 0,398379 5 C:\Temp\ GA 1 Signal NGP (verh.bief - mal.boy).txt Corr 38,77761 99,69935 0,051627 6 C:\Temp\ GA 1 Signal NGP (prav.bereg- mal.boy).txt Corr 26,40192 67,87584 0,038082 7 C:\Temp\ GA 1 Signal NGP (verh.bief - bol.boy).txt Corr 31,32362 75,56424 0,088865 8 C:\Temp\\ GA 1 Signal NGP (prav.beregbol.boy).txt Corr 43,89619 204,2933 0,087641 9 C:\Temp\GA 1 Signal NGP (verh.bief mal.boy).txt Hist 7,583924 6,531989 0,786453 10 C:\Temp\ GA 1 Signal NGP (prav.beregmal.boy).txt Hist 11,0985 8,478381 1,161716 11 C:\Temp\ GA 1 Signal NGP (verh.bief bol.boy).txt Hist 7,307405 6,997804 0,836756 12 C:\Temp\\ GA 1 Signal NGP (prav.beregbol.boy).txt Hist 6,282966 7,956149 0,725356 13 C:\Temp\GA 1 Signal NGP (verh.bief mal.boy).txt Spec 269,6069 784,9293 0,641022 14 C:\Temp\ GA 1 Signal NGP (prav.beregmal.boy).txt Spec 303,1865 795,5398 0,664621 15 C:\Temp\ GA 1 Signal NGP (verh.bief bol.boy).txt Spec 390,9942 1035,179 0,783354 16 C:\Temp\\ GA 1 Signal NGP (prav.beregbol.boy).txt Spec 299,6998 850,3134 0,728007 Chart ГА 1 Сигнал НГП (верх. бьеф - малый бой) ГА 1 Сигнал НГП (пр. берег - малый бой) ГА 1 Сигнал НГП (верх. бьеф большой бой) ГА 1 Сигнал НГП (пр. берег - большой бой) ГА 1 Сигнал НГП (верх. бьеф - малый бой) ГА 1 Сигнал НГП (пр. берег - малый бой) ГА 1 Сигнал НГП (верх. бьеф большой бой) ГА 1 Сигнал НГП (пр. берег - большой бой) ГА 1 Сигнал НГП (верх. бьеф - малый бой) ГА 1 Сигнал НГП (пр. берег - малый бой) ГА 1 Сигнал НГП (верх. бьеф большой бой) ГА 1 Сигнал НГП (пр. берег - большой бой) ГА 1 Сигнал НГП (верх. бьеф - малый бой) ГА 1 Сигнал НГП (пр. берег - малый бой) ГА 1 Сигнал НГП (верх. бьеф большой бой) ГА 1 Сигнал НГП (пр. берег - большой бой) Таблица 1 является реляционной БД, в которой полями служат столбцы, а записями – строки. Путем введения опции «Автофильтр», можно сортировать записи БД, устанавливать интервалы анализа и, таким образом, обнаруживать скрытые закономерности в ее структуре. Можно синтезировать алгоритм, который только по минимальным и максимальным значениям трех параметров (NF1, NF2, K) устанавливает путь доступа к любой записи, то есть к любой качественной характеристике (таблица 2). Наряду с минимаксными оценками для фильтрации записей можно использовать интервальные значения. Условия, фильтрующие качественные характеристики, записываются в виде алгоритма в память анализирующей части системы измерения. На втором этапе (этапе измерения) анализируется входной сигнал с неизвестной качественной характеристикой. При этом измеряются те же идентификационные параметры (NF1, NF2, K), используя которые по записанному алгоритму определяется путь доступа к сигналу. Если конечной точкой этого пути служит один из вариантов качественных характеристик, то данная характеристика принимается за конечный результат анализа. Для исключения возможных ошибок, полученный результат всегда согласовывается с мнением экспертов данной предметной области. Если же сочетание идентификационных параметров анализируемого сигнала не приводят к одному из выходов алгоритма фильтрации, то требуется либо увеличить количество эталонов БД, либо увеличить размерность измерения идентификационных параметров введением дополнительных характеристик (например, ввести измерение автокорреляционных функций). Таблица 2 Условия, фильтрующие качественные характеристики ГА № 1 2 3 4 File Name Signal NGP (verh.bief mal.boy).txt Signal NGP (prav.beregmal.boy).txt Signal NGP (verh.bief bol.boy).txt Signal NGP (prav.beregbol.boy).txt Chart верх. бьеф малый бой пр. берег - малый бой верх. бьеф большой бой пр. берег - большой бой Условия Time NF2=max Hist NF2=min Corr - Spec NF1=min; NF2=min; K=min NF1=min; K=min NF1=max; NF2=max; K=max NF1=min; NF2=min; K=min - NF2=min - K=max NF1=max; NF2=max; K=max NF1=max; K=max NF1=min; K=max NF1=max; NF2=max - Предлагаемая табличная классификация по свойствам регулярности-хаотичности и симметрии-асимметрии позволяет разделить сигналы на принадлежность к объектам типа: «prav_bereg_» и «verh_bief_» и по силе проявления влияющего фактора – на группы «mal_boy» и «bol_boy». Вывод: рассмотренный метод идентификационных измерений позволяет решать задачу распознавания и оценки состояния гидроагрегата по вибросигналам. Литература: 1. Antunovic R. Role and importance vibrodiagnostics in maintenance technical system // 15th International research-expert conference “Trends in the Development of Machinery and Associated Technology”. Prague, 12-18 september 2011, p. 309-312. 2. Русов В. А. Спектральная вибродиагностика./В. А. Русов . – Пермь: вып. №1, 1996. – 176 с. 3. Смирнов В. И. Методы и средства функциональной диагностики и контроля технологических процессов на основе электромагнитных датчиков Монография /В. И. Смирнов. – Ульяновский государственный технический университет. – Ульяновск: УлГТУ,2001. – 190 с. 4. Antoni J. Blind separation of vibration components: Principles and demonstrations. // Mechanical Systems and Signal Processing, 2005, v.19, p. 1166–1180. 5. Jablonski A., Barszcz T., Antoni J. Comparison of vibration signal separation techniques for rotating machinery // 6th international conference “Acoustical and vibratory surveillance methods and diagnostic techniques”. Compiegne, 25–26 october, 2011, p. 3-10. 6. Губарев В.В., Горшенков А.А., Кликушин Ю.Н., Кобенко В.Ю. Классификационные измерения: методы и реализация/ Автометрия - Новосибирск: Изд-во СО РАН, №2, 2013. с.76-84 7. Кликушин Ю.Н., Кошеков К.Т. Методы и средства идентификационных измерений сигналов/ Монография. - Изд-во СКГУ им. М.Козыбаева. - Петропавловск: 2007. -186 с. ISBN 9965-676-92-5