2 Содержание .................................................................................................................................... 2 Содержание
реклама

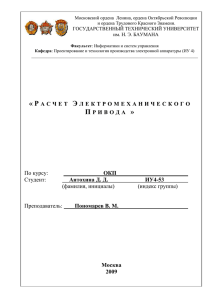
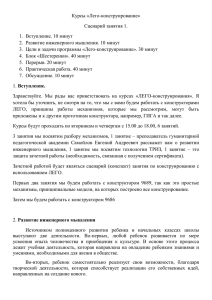
2 Содержание Содержание .................................................................................................................................... 2 1. Исходные данные ...................................................................................................................... 3 2. Предварительный выбор двигателя разрабатываемой конструкции ................................... 3 3. Кинематический расчет ............................................................................................................ 4 3.1. Определение общего передаточного отношения ............................................................ 4 3.2. Определение числа ступеней и распределения общего передаточного отношения по ступеням в соответствии с заданным критерием проектирования ЭМП ............................ 4 3.3. Определение чисел зубьев колес редуктора .................................................................... 4 4. Силовой расчет ЭМП ................................................................................................................ 6 4.1 Проверочный расчет выбранного двигателя .................................................................... 6 4.2. Определение модуля зацепления ...................................................................................... 7 5. Геометрический расчет кинематики ЭМП ............................................................................. 9 6. Расчет валов и опор редуктора .............................................................................................. 10 6.1. Расчет валов ...................................................................................................................... 10 6.2 Расчет опор ........................................................................................................................ 16 7. Точностной расчет разрабатываемой кинематики ............................................................... 17 8. Проверочные расчеты проектируемого привода ................................................................. 19 8.1 Уточненный силовой расчет и проверка правильности выбора электродвигателя .... 19 8.2. Проверочные расчеты на прочность .............................................................................. 24 Литература ................................................................................................................................... 26 3 1. Исходные данные Требуется разработать ЭМП на основе ниже приведенных данных. Момент нагрузки Мн=0.5 [н*м] Угловое ускорение Момент вращения инерции выходного вала нагрузки Частота вращения выходного вала nн=14 об/мин Температура Род тока Срок службы эксплуатации (час), не менее Ен=20 рад/с Iн=0.15 кг/м2 Режим работы Т= - 20о …+40о С переменный 500 часов Метод расчета, процент риска при расчете, точность Кратковр еменный Вероятностный, 4.5% Рабочий угол поворота выходного вала, (град) 3600 град Точность отработки не хуже (угловые минуты) 20’ Критерий расчета Минимизация суммарного линейного расстояния 2. Предварительный выбор двигателя разрабатываемой конструкции Предварительный выбор электродвигателя осуществляется, исходя из соотношения [1] * : N M M n N двиг н н н н н , где 30 ξ - коэффициент запаса Выбирается согласно заданному режиму работы (кратковременный режим) и [1], ξ = 2,0 Mн – момент нагрузки на выходом валу По условию Mн=0,5 Нּм nн – частота вращения выходного вала редуктора По условию nн=14 об/мин η – приближенное значение КПД будущего редуктора. Поскольку используется цилиндрический зубчатый редуктор, то принимаем η = 0,8. Тогда: N двиг 2 0.5 14 3,14 1.83 (Вт) 30 0,8 По вычисленному значению мощности двигателя и заданному в условии роду тока (переменный) из [1] выбираем двигатель ЭМ-4М со следующими техническими характеристиками: * - ссылка на источник из списка литературы 4 Табл. 2.1. Паспортные данные двигателя ЭМ-4М Напряжение питания 115 В / 60 В Частота питающего напряжения 400 Гц Род тока Переменный, однофазный Номинальная мощность Nдвиг 4 Вт Номинальные момент Mн 0,012 Нּм Пусковой момент Mп 0,022 Нּм Частота вращения выходного вала nдвиг 3300 об/мин Момент инерции ротора Jр 1,3ּ10-6 кгּм2 Температура окружающей среды -60…+80 °С Диаметр выходного вала Øвала 3 мм Масса 0,55 кг Двигатель малоинерционный. 3. Кинематический расчет 3.1. Определение общего передаточного отношения По известным значениям скоростей на входе nдвиг и выходе nн определяем передаточное отношение редуктора (цепи двигатель – выходной вал) по формуле: n i0 двиг , где nн об nдвиг = 2000 /мин. (см. табл. 2.1) Частота вращения выходного вала редуктора nн = 14 об/мин (из условия) 3300 i0 236 Тогда, получаем: 14 3.2. Определение числа ступеней и распределения общего передаточного отношения по ступеням в соответствии с заданным критерием проектирования ЭМП Определим число ступеней из условия максимального быстродействия. n 3lg i0 3lg 236 7 По заданному в условии задания критерию минимизации – минимизация суммарного линейного расстояния – находим число ступеней редуктора и осуществляем разбивку i0 по ступеням. Число ступеней редуктора: n 1.482lg 2i0 1.482lg 2 236 4 Таким образом, количество ступеней n=4 Передаточные отношения по ступеням в соответствии с критерием минимизации суммарного линейного расстояния[1] i1 i2 ... in 1 n 2i0 in i1 2 Табл. 3.1. Передаточные отношения i12 I34 i56 I78 4,66 4,66 4,66 2,33 3.3. Определение чисел зубьев колес редуктора Назначим число зубьев на всех шестернях Z1 Z3 Z5 Z7 17 (согласно рекомендуемым значениям[1]). 5 Число зубьев ведомых колес для редуктора вычисляется по формуле: Z k Z k 1ik 1, k , где k = 2, 4, 6, 8 - номер колеса. Учитывая рекомендованный ряд [1], назначаем количества зубьев колес и шестерен: Табл. 3.2. Числа зубьев колес редуктора № колеса 1 2 3 4 5 6 7 8 № элементарной передачи I II III IV Число зубьев 17 80 17 80 17 80 17 40 Так как при расчетах выбор числа зубьев осуществлялся из рекомендованного ряда, то вычисляем фактическое передаточное отношение и погрешность передаточного отношения. Z ik , k 1ф k 1 , где k = 1, 3, 5 Zk Табл. 3.3. Фактические значения передаточных коэффициентов i12ф 4,7 i34ф 4,7 I56ф 4,7 I78ф 2,35 Фактическое передаточное отношение редуктора рассчитывается по формуле: 6 i0 ф ik , k 1ф k 1 Подставляя значения из табл. 3.3, находим i0Ф : i0 ф 4.7 4.7 4.7 2.35 244 Погрешность передаточного отношения находится по формуле: i i0 i0ф 100% i0 Подставляя значения, получаем: i 244 236 100% 3.5% 236 Условие применимости расхождения i0 и i0ф из практических рекомендаций: i 10% . Так как i 3.5% 5% , следовательно, условие выполняется. По результатам выполненного расчета изобразим кинематическую схему редуктора в виде эскиза без соблюдения масштаба, но таким образом, чтобы была ясна кинематическая цепь передачи движения между валами (рис. 3.1). 6 Рис. 3.1. Кинематическая схема редуктора 4. Силовой расчет ЭМП 4.1 Проверочный расчет выбранного двигателя Общий момент нагрузки рассчитывается по формуле: M M ст M д M ст J н н , где Mст – момент нагрузки По условию: Mст = 0,5 Нּм Mд – динамический момент нагрузки Jн – момент инерции нагрузки По условию: Jн=0,15 кгּм2 εн – требуемое угловое ускорение вращения выходного вала По условию: εн=20 рад/с2. M 0.5 0,15 20 3.5 (Нּм) Тогда, получаем: Крутящий момент на k-м валу (k=1…5) рассчитывается по формуле: M k 1 , где Mk ik , k 1k , k 1подш ik,k+1 – передаточное отношение передачи ηk,k+1 – КПД передачи, ηk,k+1 = 0,98 ηподш – КПД подшипников, в которых установлен ведущий вал, ηподш = 0,98 Расчет ведем от выходного вала. k MK Табл. 4.1. Крутящие моменты на валах Входной (1) 2 3 4 выходной (5) 0,018 0,08 0,35 1,56 3,5 Выполним предварительную проверку правильности выбора двигателя: M п М1 . По паспортным данным Mп = 0,022(Нּм) ≥ 0,018(Нּм), т.е. предварительно двигатель выбран верно (выбранный двигатель сможет обеспечить нужное угловое ускорение нагрузки при старте). Так как по условию нет дополнительных требований, то двигатель по силовому параметру подходит полностью. 7 4.2. Определение модуля зацепления Модуль зацепления определяется из расчета зубьев на прочность (изгибную и контактную). В проектируемом ЭМП предполагается открытый тип передач. При проверочном расчете по известной геометрии зубьев и заданным нагрузкам определяют действующие контактные напряжения σн и проверяется условие σн ≤ [σн]. Расчет на изгибную прочность проводят для наиболее нагруженной ступени редуктора, т.е. в нашем случае для ступени Z7-Z8. При этом модуль зацепления выбирается по менее прочному колесу зубчатой элементарной передачи, исходя из неравенства [2]: M YF K (для цилиндрических прямозубых и косозубых передач), где m Km 3 z bm [ F ] Кm – коэффициент Кm =1,4 для прямозубых колес M – крутящий момент, действующий на колесо, по данным силового расчета М=3.5 Нм YF – коэффициент формы зуба K – коэффициент неравномерности нагрузки по ширине колеса K = 1 при постоянной нагрузке, скоростях v < 15 м/с, твердости зубьев HB < 350 [2] z – число зубьев рассчитываемого колеса ψbm – коэффициент, равный отношению ширины зубчатого венца к модулю (ψbm = 3…16). Выбираем ψbm = 9. [σF] – допускаемое напряжение изгиба Определяем коэффициенты формы зуба по таблицам [1]: Для шестерни: z = 17, YF = 4,3 Для колеса: z = 40, YF = 3,77 Выбор материала Примем, что все ведущие зубчатые колеса выполнены из одинакового материала. Ведомые колеса также сделаны из одного материала, но из условия равнопрочности зубчатых колес пары следует, что материал шестерни должен быть более качественным, чем материал колеса. Исходя из рекомендаций [1] для прирабатывающихся передач (с твердостью рабочих поверхностей колес HB ≤ 350)[1], назначаем для зубчатых колес разные материалы, причем твердость шестерни должна быть на 20…30 единиц больше твердости колеса. Выбираем пару материалов: сталь 40Х (для шестерен) – сталь 40 (для колес). Табл. 4. 2. Параметры выбранных материалов [1, 2] сталь 40 Параметр Обозначение (колесо) Коэффициент линейного расширения Плотность Предел прочности Предел текучести Предел выностивости при изгибе Предел контактной выносливости поверхности зубьев Модуль упругости Твердость Твердость поверхностная Термообрабтка сталь 40Х (шестерня) α, 1/˚ , кг/м3 в, МПа т, МПа FR, МПа 11ּ10-6 7850 560 340 550 11ּ10-6 7850 1000 825 960 HR, МПа 17HRC + 200 = 744 1050 E, МПа HB HRC 2,1ּ105 200 48 поверхностная закалка 2,1ּ105 250 55 объемная закалка, азотирование Допускаемое напряжение изгиба рассчитывается по формуле: 8 [ F ] FR K FC K FL , где sF FR - предел выносливости при изгибе (см. табл. 4.2). KFC – коэффициент, учитывающий цикл нагружения колеса KFC = 0,65 для реверсивных передач S F – коэффициент запаса прочности Так как режим работы – кратковременный, то принимаем S F = 2,2 KFL – коэффициент долговечности, вычисляемый по формуле: K FL 4 106 s 4 106 s , где NH 60 n c l NH – число циклов нагружения NH = 60nlc n – частота вращения зубчатого колеса Для колеса: n = 14 (об/мин), для шестерни: n =32,9 об/мин c – число колес, находящихся одновременно в зацеплении с рассчитываемым По кинематической схеме: c = 1 l – срок службы передачи По условию: l = 500 (ч) s – показатель степени s = 6 для HB < 350 [1] K FLколеса 4 106 1, 46 60 14 1 500 6 4 106 K FLшестерни 1,26 60 32,9 1 500 550 0,65 1,46 [ F ]колеса 237 (МПа) 2,2 960 0,65 1,26 [ F ]шестерни 358 (МПа) 2,2 YF 3,77 0,016 [ F ] колеса 237 6 YF 4,3 0,012 [ F ] шестерни 358 Расчеты модулей Так как материалы сопрягаемых цилиндрических колес разные, то расчет модуля ведем по Y колесу, для которого отношение F больше. [ F ] Mн = 3500 (Нּмм) 3500 3,77 1 m 1,4 3 0,8 40 7 237 Учитывая рекомендуемый ряд модулей [2], назначаем m = 0,8. Исходя из конструктивных и технологических соображений, назначаем на все передачи модуль m = 0,8. 9 Определение допускаемых контактных напряжений для шестерен и колес производится по формуле [1]: Z Z K [ H ] HR R V HL , где H ZR – коэффициент, учитывающий шероховатость сопряженных поверхностей, при Ra 0.63...1.25 ZR = 1 ZV – коэффициент, учитывающий окружную скорость колеса, при V 5 м/с ZV = 1 δH – коэффициент безопасности δH =1,2 HR - предел контактной выносливости поверхности зубьев соответствующий NHO KHL – коэффициент долговечности, учитывающий возможность повышения допускаемых напряжений для кратковременно работающих передач N K HL s HO NH NHО – базовое число циклов перемены напряжений, зависит от твердости поверхностного слоя, для закаленных до HRC 55…65 N HO 2.5 105 циклов Для шестерен: для закаленных до HRC 55…65 N HO 2.5 105 циклов n = 32,9 об/мин N HO 6 2,5 108 2.5 NH 987000 1050 1 1 2.5 [ H ] 2201 МПа 1,2 K HL s Для колес: для закаленных до HRC 45…50 NHO = 1,5ּ108 циклов n = 10 об/мин N HO 6 1,5 108 K HL s 2.31 NH 987000 744 1 1 2.31 [ H ] 1432 МПа 1,2 5. Геометрический расчет кинематики ЭМП Определим основные размеры передачи и её элементов. Геометрические размеры зубчатых колес находятся по справочным таблицам [1]. mz Делительный диаметр: , где d cos β – угол наклона зубьев т. к. колеса прямозубые, то β = 0 Диаметр вершин зубьев: da ha* – коэффициент граничной высоты ha* = 1 mz 2m(ha* x) , где cos 10 x – коэффициент смещения производящего контура x = 0, т.к. редуктор выполняется с нулевыми колесами mz 2m(ha* c* x) , где cos * с – коэффициент радиального зазора с* =0,35, т. к. m = 0,8 [1] df Диаметр впадин: Ширина колеса: b2 bmm , где ψbm – коэффициент, равный отношению ширины зубчатого венца к модулю ψbm = 7 b1 b2 1,5m Ширина шестерни: Делительное межосевое расстояние: a m( z1 z2 ) 2 cos Для всех шестерен: d 0,8 z 0,8 17 13,6 (мм) d a m( z 2) 0,8(17 2) 15,2 (мм) d f m( z 2.7) 0,8(17 2.7) 11, 44 (мм) b2 7 0.8 5.6 b1 5,6 1,5 0,8 6,8 (мм) Размеры 1-й шестерни позволяют закрепить ее на валу двигателя (Øвала = 3 мм), т.к диаметр впадины шестерни больше диаметра её ступицы. Табл. 5.1. Параметры колес Параметр № колеса 1 2 3 4 z d 0,8 z , мм d a m( z 2) , мм d f m( z 2.7) , мм 80 80 80 40 64 64 64 32 65,6 65,6 65,6 33,6 61,84 61,84 61,84 29,84 b2 7 0,8 5,6 (мм) Табл. 5.2. Делительные межосевые расстояния № элементарной передачи 1 2 3 4 zколеса 80 80 80 40 zшестерни 17 38,8 38,8 38,8 22,8 a 0,4( z1 z2 ) , мм 6. Расчет валов и опор редуктора 6.1. Расчет валов Для расчета диаметров валов используем следующую формулу: M кр , где d3 0,2 [ ] 11 Mкр – момент, действующий на вал, Нּмм σ – допускаемое касательное напряжение для выбранного материала, рассчитывается по формуле: [ ] 1 , где n σ-1 – предел выносливости материала при симметричном цикле n – коэффициент запаса назначаем значение n = 1,5 из рекомендуемого интервала. В качестве материала для валов выбираем сталь 40Х после улучшения. Характеристики: σ-1 = 380 МПа, HB = 280, G = 1,5 105 МПа, [σи]=294,3 МПа 380 [ ] 1 253 МПа. n 1,5 При значительной длине и недостаточной крутильной жесткости валика упругий мертвый ход в редукторе может оказаться недопустимо большим. Для учета этого фактора расчет диаметра валика ведут из условия: d 4 64 M кр l G [ ] , где l – длина рабочего участка валика, на которой действует крутящий момент Mкр Назначим l = 29 мм из геометрических размеров зубчатых колес G – модуль упругости при сдвиге [φ] – допускаемое значение угла закрутки вала По условию: [φ] = 20' Табл. 6.1. Расчет диаметров валов № вала I (входной) II III IV V(выходной) Параметр Mкр, Нּмм 18 80 350 1560 3500 dmin, мм 0,71 1,16 1,9 3,1 4,1 dmin φ, мм 0,24 0,35 0,51 0,75 0,91 d, мм 3,0 3,0 3,0 5,0 5,0 Расчет вала на жесткость. При расчете принимаем: 1. За ширину колес и шестерен принимаем наибольшее значение ширины 6,8 мм 2. Расстояние между шестернями 3 мм 3. Расстояние между шестернями и опорой 3 мм 4. Ширина опоры 4 мм 5. Из этого следует, что длина вала 46,2 мм Расчет сил, действующих на вал, ведем по формулам: 2M кр , где P d d – диаметр начальной окружности колеса Принимаем d равным диаметру делительной окружности, т. к. x = 0 Mкр – крутящий момент на валу R P tg , где α = 20 12 Табл. 6.2. Значения реакций, действующих на валы, и расстояния между точками их приложения № вала I II III IV V Параметр Mкр 18 80 350 1560 3500 dшестерни 13,6 dколеса — 64 64 64 32 pш 2.65 11.77 51,47 229.4 0 rш 0.96 4.28 18.73 83.45 0 pк 0 2.5 10.94 48.75 218.75 rк 0 0.91 3.98 17.74 79.62 a 8,4 8,4 18,2 18,2 0 b 37,8 19,6 9,8 19,6 37.8 c 0 18,2 18,2 8,4 8.4 Находим неизвестные силы реакции x1, x2, y1, y2, используя уравнения моментов и сил: M F F D 0 Y 0 X 0 Плоскость ZY: Для валов I, III, V: r1 rш , r2 rк rк c rш (c b) y1 (a b c) 0 y1 rш rк y2 0 r c rш (c b) y1 к abc y2 y1 rш rк Для валов II, IV: r1 rк , r2 rш rшc rк (c b) y1 (a b c) 0 y1 rк rш y2 0 r c rк (c b) y1 ш abc y2 y1 rш rк 13 Рис. 6.1. Схема редуктора и нагрузок на валы Плоскость ZX: Для валов I, III, V: p1 pш , p2 pк pк c pш (c b) x1 (a b c) 0 x1 pш pк x2 0 pк c pш (c b) x1 abc x2 x1 pш pк Для валов II, IV: p1 pк , p2 pш pшc pк (c b) x1 (a b c) 0 x1 pк pш x2 0 pш c pк (c b) x1 abc x2 x1 pк pш Радиальная нагрузка на опору рассчитывается по формуле: Fr x 2 y 2 14 Табл. 6.3. Значения реакций в опорах и радиальная нагрузка на опоры № вала I II III IV V Параметр x1 2.17 -2.59 26.88 -12.16 39.77 y1 -0.79 -0.94 -9.78 -4.58 14.48 x2 0.48 -6.68 13.67 -168.49 -258.52 y2 -0.18 -2.43 -4.96 -61.40 65.14 Fr1 2.31 2.76 28.60 13.00 1837.81 Fr2 0.51 7.11 31.70 179.33 2057.28 Далее, строим эпюры моментов. Эпюры нагрузок в плоскости ZY (рис. 6.2): Табл. 6.4. Моменты в сечениях валов в плоскости ZY № вала I II III IV V Сечение 2 1 -44.23 -90.27 -515.76 547.18 6.63 7.90 178 83.36 Эпюры нагрузок в плоскости ZX (см. рис. 6.2): Табл. 6.5. Моменты в сечениях валов в плоскости ZX № вала I II III IV V Сечение 2 1 121.58 -248.79 1415.32 18.23 -21.76 489.22 -221.31 2171.57 15 Рис. 6.2. Эпюры изгибающих моментов, действующих на валы 16 Рассчитываем диаметры валов, исходя из эпюр нагрузок M пр М и2 0,75M к2 , где М и – изгибающий момент d 3 M пр 0,1 [ и ] Табл. 6.6. Расчет диаметра вала № вала I II III IV Наиболее опасное 1 2 1 2 сечение Мкр, МПа 18 80 350 1560 2 2 М и , МПа 376 16738 271020 2269139 Mпр, МПа 25 147 602 2024 dmin, мм 0.95 1.71 2.73 4.1 V 2 3500 5015122 3768 5.04 Учитывая стандартный ряд диаметров валов, получаем: Табл. 6.7. Требуемые диаметры валов № вала I (входной) II III IV V (выходной) d, мм 3,0 3,0 3,0 5,0 6,0 6.2 Расчет опор Поскольку в разрабатываемом редукторе присутствует только радиальная нагрузка на валы, то выбираем радиальные шарикоподшипники. Расчет будем вести по динамической грузоподъемности, т.к. частота вращения валов больше 1 об/мин, используя следующую формулу: CP 0,01P 3 60nl , где P – эквивалентная динамическая нагрузка: P ( XVFr YFa ) Kб Kт , где Fa – осевая нагрузка на валы Fa =0 Fr – радиальная нагрузка на валы V – коэффициент вращения V =1, т. к. вращается внутреннее кольцо X – коэффициент радиальной нагрузки X=1 Y – коэффициент осевой нагрузки Y=0 Kб – коэффициент безопасности Kб = 1, считаем, что работа спокойная, без толчков Kт – температурный коэффициент Kт = 1,05, т.к. рабочая температура не превышает 125 С 17 Табл. 6.8. Расчет динамической грузоподъемности №вала I II III IV V Параметр n 3300 708 152 32 14 Fr1 2.31 2.76 28.60 13.00 1837.81 P1 1,05 Fr1 2,43 2,90 30,03 13,65 1929,70 C P1 11,24 8,03 49,80 13,47 1445,13 Fr2 0.51 7.11 31.70 179.33 2057.28 P2 1,05Fr2 0,54 7,47 33,29 188,30 2160,14 CP2 2,50 3,0 20,68 55,21 185,82 1617,70 3,0 3,0 5,0 6,0 d, мм Исходя из этих данных, назначаем подшипники: Табл. 6.9. Выбранные подшипники № вала I II III IV V Подшипник 1000093 1000093 2000093 1000095 1000096 Табл. 6.10. Параметры подшипников Подшипник 1000093 2000083 1000095 1000096 Параметр Диаметр внутреннего кольца, d, мм Диаметр наружного кольца, D, мм Ширина подшипника, B, мм r, мм z Dw, мм 3 8 3 0,2 6 1,588 3 7 2,5 0,3 7 1,300 5 13 4 0,4 8 2,000 6 15 5 0,4 8 2,381 7. Точностной расчет разрабатываемой кинематики Назначим для рассчитываемого ЭМП 6-ю степень точности и вид сопряжения — G. Fi0 min 0,62K s ( Fi1 Fi2 ) , где Ks – коэффициент фазовой компенсации, выбирается из таблиц [1]. Fi Fр f f , где Fр – допуск на накопленную погрешность шага зубчатого колеса (шестерни), выбирается из таблиц [1] ], Fi1 , Fi2 - допуск на кинематическую погрешность шестерни и колеса соответственно. ff – допуск на погрешность профиля зуба ff = 10 [1], т. к. m = 0,8 Fi0 max K ( Fi1 ) 2 E2 М 1 ( Fi2 ) 2 E2 М 2 , где E М 1 и E М 2 – приведенные погрешности монтажа шестерни и колеса соответственно E М 1 E М 2 0 Минимальные и максимальные значения кинематических погрешностей элементарных передач: 18 i 0 min j 6,88 Fi0 min j mz2 j , i 0 max j 6,88 Fi0 max j mz2 j , где z2j – число зубьев ведомого колеса m – модуль передачи, мм Значение кинематической погрешности: i0 j i 0 j K , где: К – коэффициент, учитывающий зависимость кинематической погрешности рассчитываемой передачи от фактического максимального угла поворота ее выходного колеса. К = 1, т.к. угол поворота выходного вала по условию превышает 360 [1]. Координата середины поля рассеяния: Eij i0 max j i0 min j Поле рассеяния: 2 Vij i0 max j i0 min j Передаточный коэффициент j-й элементарной передачи: 1 1 j i j ,вых i j 1, j 2 iвых1,вых Минимальное значение мертвого хода: л min j 7,32 jn, min j , где mz2 j jn,min – минимальный боковой зазор между зубьями по общей нормали к профилям, выбирается по таблицам [1]. Максимальное значение мертвого хода: jt max 0,7( EHS1 EHS 2 ) 0,5(TH21 TH2 2 ) 2 f a2 p12 p22 , где EHS1, EHS2 – наименьшее смещение исходного контура шестерни и колеса TH1, TH2 – допуск на смещение исходного контура шестерни и колеса fa – допуск на отклонение межосевого расстояния передачи л max j 6,88 jt max j mz2 j p1, p2 – радиальные зазоры в опорах шестерни и колеса. p1 = p2 = 0 Координаты середины поля рассеяния мертвого хода Eлj: л max j л min j E лj 2 Поле рассеяния мертвого хода Vлj: Vлj л max j л min j Координата середины поля рассеяния суммарной погрешности: 19 n Eip j Eij 8.78 j 1 Максимальная вероятностная кинематическая погрешность: n ip0 Eip0 t1 ( jVij ) 2 , где j 1 t1 – коэффициент, учитывающий процент риска По условию задан риск 4.5%, поэтому, исходя из [1], назначаем t1 = 0,35 ip0 9.98 Координата середины поля рассеяния мертвого хода: n Eip j Eлj 8.6 j 1 Значение мертвого хода: n ллp E лp t2 ( jVл j ) 2 , где j 1 t2 – коэффициент, учитывающий процент риска По условию задан риск 4.5%, поэтому, исходя из [1], назначаем t2 = 0,28 n ллp E лp t2 ( jVлj ) 2 9,87 j 1 Вычислим суммарную погрешность передачи: ip0 ллp 9.87 9.98 19.85' 20' Разрабатываемый ЭМП удовлетворяет требуемому условию точности. 8. Проверочные расчеты проектируемого привода 8.1 Уточненный силовой расчет и проверка правильности выбора электродвигателя Проверим выполнение следующих условий: * M п М ст М д*пр пр * , где M н М ст пр Mп – пусковой момент двигателя Mн – номинальный момент двигателя * , М д*пр – уточненные статический и динамический момент нагрузки, приведенные к М ст пр валу двигателя, соответственно. Статический момент: * М ст пр Mн , где i0 ц подш подш – КПД подшипников подш =0,98 ц – КПД цилиндрических прямозубых передач 1 1 1 ) , где 2 z1 z2 f – коэффициент трения f = 0,06 для колес из закаленной стали ц 1 f c ( 20 Табл. 7.2. Расчет погрешностей редуктора d, мм z EHS Fr, мкм TH i Ks Fр, мкм Fi Fi0 min , мкм I1 13,6 17 14 16 28 I2 64 80 22 22 38 II1 13,6 17 14 16 28 4,7 0,87 17 27 II2 64 80 22 22 38 III1 13,6 17 14 16 28 4,7 0,87 25 35 17 27 III2 64 80 22 22 38 4,7 0,87 25 35 17 27 25 35 IV1 IV2 13,6 32 17 40 14 18 16 18 28 32 2,35 0,75 17 19 27 29 33 33 33 26 54 54 54 42 i 0 min j , угл. мин 3,55 3,55 3,55 5,59 i 0 max j , угл. мин 5,8 5,8 5,8 9,03 i 0 min j , угл. мин 3,55 3,55 3,55 5,59 5,8 5,8 5,8 9,03 4,67 2,25 0,02 16 4,67 2,25 0,09 16 4,67 2,25 0,42 16 7,31 3,44 1 13 2,29 2,29 2,29 3 fa jt max, мкм л max j , угл. мин 14 69 14 69 14 69 11 52 7,4 7,4 7,4 11,18 Eлj 4,8 4,8 4,8 7 Vлj л max j л min j 5,11 5,11 5,11 4,00 Fi0 max , мкм i 0 max j , угл. мин Eij, угл. мин Vij, угл. мин j jn,min, мкм л min j , угл. мин 23 – коэффициент перекрытия = 1,5 с – коэффициент нагрузки F 2,92 , где c F 0,174 F – окружная сила 2M F . mz2 Найдем момент на колесе выходного вала: Mс 500 MV 510 Нּмм подш 0,98 Формула для нахождения момента на других колесах с учетом потерь на трение в зацеплении и в подшипниках: M k 1 Mk подшk , k 1ik , k 1 Найдем КПД всех элементарных передач. Расчет будем вести от выходной пары. Табл. 8.1. Расчет КПД элементарных передач Элементарная пара 12 23 34 45 Параметр i 4,7 4,7 4,7 2,35 М 10,75 49,05 223,69 510 F 0,34 1,53 7 31,9 c 6,34 3,24 1,38 1,09 ηцi 0,937 0,967 0,986 0,987 Найдем общий КПД редуктора: ц цi 0,88 i 5 подш подш 0,90 Приведенный к валу двигателя уточненный статический момент: Mн 500 * М ст 2.58 (Нּмм) < Mном пр i0 ц подш 244 0,88 0,90 По статическому моменту двигатель выбран правильно. М д.пр. J пр , где Динамический момент: ε – требуемое угловое ускорение вала двигателя н i0 , где εн – требуемое угловое ускорение нагрузки Jпр – приведенный к валу двигателя момент всего ЭМП, кгּм2 J J пр J р J рпр 2Н , где i0 Jр – момент инерции вращающихся частей двигателя, Jр=1,3ּ10-6 кгּм2 24 Jн – момент инерции нагрузки, Jн = 0.15 кг·м2 Jрпр – приведенный момент инерции ротора J J J рпр J1 22 2n i12 i1n Момент инерции каждого звена: bpd 4 1012 , где Ji 32 d – диаметр звена b – толщина звена ρ – плотность, г/см3 ρ =7,85 г/см3 Табл. 8.2. Расчет момента инерции каждого звена Колесо 1 2 3 4 5 6 7 8 Параметр 13,6 64 13,6 64 13,6 64 13,6 32 d 6,8 5,6 6,8 5,6 6,8 5,6 6,8 5,6 b 17,9 7240 17,9 7240 17,9 7240 17,9 4525 Jּ10-8 J pnp (17.9 17.9 7240 17.9 7240 17.9 7240 17.9 7240 9 )10 38 108 (кг м2 ) 4.7 2 22.092 103.8232 244 2 J пр J р J рпр JН 0,15 1,3 106 38 108 4,19 106 2 i0 2442 М д.пр. J пр 4,19 106 10 244 10.25 (Нּмм) * М ст М д*пр 2.58 10.25 12.83 (Нּмм) < 22(Нּмм) пр Проверка выполняется, т. е. по динамическому моменту двигатель выбран правильно. 8.2. Проверочные расчеты на прочность Проверка прочности зубьев на контактную и изгибную прочность. Контактные напряжения, действующие на зубчатые колеса M 2 K конт K3 (i12 1)3 , i122 ba 2 изгибные напряжения, действующие на зубчатые колеса н M 2 K изгибнK3 (i12 1)3 , где i122 ba 2 i12 – передаточное отношение ступени M2 – момент на колесе a – межосевое расстояние b – ширина зубчатого колеса Т.к. ширина колеса меньше ширины шестерни, то при расчетах на прочность используем ширину колес b = 5,6 мм K – коэффициент расчетной нагрузки Kконт = KHVKHβ при расчете на контактную прочность Kизгибн = KFVKFβ при расчете на изгибную прочность F 25 KHV, KFV – коэффициент динамической нагрузки KFV =1,2 K 1 1,2 1 K HV 1 FV 1 1,1 2 2 KFβ, KHβ – коэффициент неравномерности распределения нагрузки по ширине зуба KFβ =1,05, т.к. колеса расположены между опорами [1] K 1 1,05 1 K H 1 F 1 1,03 2 2 Kизгибн = KFVKFβ = 1,2ּ1,05 = 1,26 Kконт = KHVKHβ = 1,1ּ1,03 = 1,13 2 E1E2 K 0,82 3 48 (Е1 = E2 = 2,1ּ105 МПа для материалов шестерни и колеса) E1 E2 Проверку ведем для наиболее нагруженной ступени редуктора Проверка на контактную прочность: н IV 500 1,13 483 (4.7 1)3 125 (МПа) 4.72 5,6 (64 13,6) 2 [ н ]шестерни 2,8 825 2030 МПа [ н ]колеса 2,8 340 952 МПа нIV [ н ]колеса [ н ]шестерни , т.е. зубчатые колеса удовлетворяют условиям контактной прочности Проверка на изгибную прочность: 500 1,26 483 (4.7 1)3 132 (МПа) IV 4.72 5,6 (64 13,6) 2 nт = 1,2 [2] 825 [ F ]шестерни 687 МПа nт 340 [ F ]кол еса 283 МПа nт FIV [ F ]колеса [ F ]шестерни , т.е. зубчатые колеса удовлетворяют условиям изгибной прочности Проверка прочности зубьев на контактную и изгибную прочность при кратковременных перегрузках. Проверка на контактную прочность: H max H K пер [ H ] , где: F Kпер – коэффициент перегрузки M 22 K пер max 1,8 M ном 12 125 1,8 168 952 2030 условие выполняется для колеса и для шестерни Проверка на изгибную прочность: Fmax F K пер [ F ] , где: 132 1,8 177 283 687 условие выполняется для колеса и для шестерни 26 Литература: 1. Ю.А. Кокорев, В.А. Жаров, А.М. Торгов, Расчет электромеханического привода. М.: Издательство МГТУ им. Н.Э. Баумана, 1995, 132 с. 2. Элементы приборных устройств. Курсовое проектирование. Под ред. Тищенко О.Ф. Высш. Школа. 1978, ч.1, ч.2.