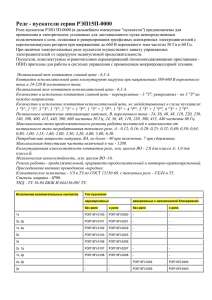
В качестве примера контроллерного управления асинхронным
реклама

Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Алтайский государственный технический университет им. И.И. Ползунова» Стальная М.И., Ерёмочкин С.Ю. ЭЛЕКТРООБОРУДОВАНИЕ ОБЩЕПРОМЫШЛЕННЫХ МЕХАНИЗМОВ Методические указания к лабораторным работам студентов специальности 140400 Барнаул 2012 1 УДК 628.352 (075.8) М.И.Стальная, Ерёмочкин С.Ю. Электрооборудование общепромышленных механизмов. Методические указания к лабораторным работам студентов специальности 140400 в соответствии с лекционным курсом. Барнаул, АлтГТУ 2013 г. С.58. Рассмотрено и одобрено на заседании кафедры АЭП и ЭТ Протокол № от . .2012 г 2 Введение Методические указания для самостоятельной работы по курсу «Электрооборудование общепромышленных механизмов» предназначено для развития и закрепления навыков у студентов «читать» различные системы автоматического управления электроприводом. Здесь собраны в основном типичные релейноконтакторные схемы управления наиболее распространенных вспомогательных механизмов общепромышленного использования, где не требуется сложных схем управления электроприводами, однако принципы управления остаются характерными и для других более сложных электроприводов. Как известно, имея определенные навыки (а вы их имеете) преобразования любых релейно-контакторных схем в схемы, выполненные на дискретных логических элементах или, имея навыки по составлению программного обеспечения работы схемы по аналогу релейно-контактной схемы, не составит труда перейти на управление данных электроприводов на современные дискретные микропроцессорные системы управления. Желаем успехов в Вашей самостоятельной творческой учебе ! 3 Схема 1. Защитная панель типа ППЗК На рис. 1 приведена схема защитной панели типа ППЗК, предназначенной для защиты трех двигателей постоянного тока приводов основных механизмов крана. На схеме показаны также контакты конечных выключателей и блокировочные контакты контроллеров. Выше схемы включения аппаратов управления показана схема силовой цепи с контактами контакторов КМ5, КМ6, КМ7, КМ8, катушками максимальных реле КМ1, КМ2, КМ3, КМ4, а также катушками тормозных электромагнитов ЭТП, ЭТТ, ЭТМ. В приведенной схеме командоконтроллеры КК1, КК2 и КК3 относятся, соответственно к оборудованию механизмов: моста, тележки и подъема. Питание к двигателям крановых механизмов подводится от одного троллея через контакт общего контактора КМ5, и от другого — через контакты контакторов КМ6, КМ7, КМ8, и силовые контроллеры. Катушки электромагнитов тормозных устройств подключаются к сети замыкающими вспомогательными контактами соответствующих контакторов. Реле максимальные используются на панелях типа ППЗК таким образом, что в главную цепь каждого двигателя включается катушка реле. Кроме того, одна катушка реле включается в общий силовой провод. Включение контакторов может быть произведено, как видно из схемы, только после установки контроллеров в нулевое положение. При выходе за пределы рабочей зоны любого из механизмов повторное включение его двигателя, так же как на панели переменного тока, возможно только для работы в противоположную сторону. Это контролируется конечными выключателями SQ1÷SQ4, соответственно. На панели используется групповое максимальное реле КМ1, на общем основании которого и обеспечиваются питанием все остальные катушки магнитных пускателей. Кнопка SB1 – «Пуск», а кнопка SB2 – «Стоп». 4 Рис. 1. Схема защитной панели типа ППЗК 5 В схеме панели типа ППЗК предусмотрена кнопка SB1, замыкающий контакт которой служит для включения контактора КМ5 после перерыва в работе. Второй контакт этой кнопки SB1.2 — размыкающий. Он включен так, что предотвращает одновременное с КМ5 включение контакторов КМ6, КМ7, КМ8, нежелательное, например, при наличии короткого замыкания в цепях управления или силовой цепи. Отметим, что минимальная защита кранового электропривода при контроллерном управлении осуществляется посредством катушек линейных контакторов, тяговое усилие которых становится недостаточным для удержания контакторов во включенном состоянии при снижении напряжения сети до значений, меньших 0,8 – 0,85 номинального. Схема 2. Контроллерное управление электроприводом переменного тока В качестве примера контроллерного управления асинхронным двигателем с контактными кольцами, установленным на механизме передвижения, рассмотрим схему, приведённую на рис. 2. Питание к двигателю подводится через защитную панель типа ПЗК и контроллер кулачкового типа. Контроллер, приведенный на рис. 2, имеет симметричную схему включения. Четыре его контакта предназначены для переключений в статорной цепи, пять – в роторной. Для изменения направления вращения двигателя, реверсирующие контакты на электроприводах крановых механизмов устанавливаются в двух линейных проводах, третий подводится непосредственно к статору. Напряжение к двигателю подается через три контактных провода, другие три провода служат для связи колец ротора двигателя с регулировочным реостатом и контроллером. К статорным выводам двигателя подключается трехфазный электромагнит тормоза YB, который разводит тормозные колодки, как только на статор подается напряжение. В приведенной схеме управления асинхронным двигателем с контактными кольцами плавный пуск и регулирование скорости достигаются постепенным поворотом маховичка контроллера вправо и влево от нулевого до пятого положения. Дополнительные сопротивления в роторной цепи при заданном положе6 нии контроллера (1-4) не равны между собой, что позволяет несколько сократить количество переключающих контактов по сравнению с симметричным включением сопротивлений. При управлении двигателем посредством контроллера оператор должен переводить рукоятку из одного положения в другое с некоторым интервалом времени, так как в противном случае могут возникнуть недопустимые броски токов, особенно при переходе в режим противовключения. Рис. 2. Схема контроллерного управления электроприводом переменного тока Механические характеристики асинхронного двигателя при контроллерном управлении обеспечивают вполне удовлетворительный режим работы механизмов передвижения. Для механизмов подъема они малопригодны, так как не 7 дают возможности производить спуск грузов с малой скоростью. Вследствие указанного применение двигателей переменного тока с контроллерным управлением на механизмах подъема ограничено. Оно встречается главным образом на кранах малой и средней производительности, особенно при легком режиме работы. На крупных кранах контроллерное управление двигателем переменного тока встречаются реже, главным образом его применяют на механизмах передвижения или вспомогательного подъема. Здесь кнопка SB1 – «Пуск», кнопка SB2 – «Стоп», SВ3 и SВ4 – конечные выключатели, КМ1, КМ3, КМ4 – реле максимального тока. Схема 3. Схема управления двигателем последовательного возбуждения с кулачковым контроллером Контроллер имеет пять положений при подъеме грузов и шесть при спуске. Схема несимметричная, так как при повороте маховичка вправо и влево получаются разные регулировочные характеристики. Питание к контроллеру и двигателю подводится через защитную панель. На рис. 3 а приведена схема включения двигателя последовательного возбуждения, управляемого посредством кулачкового контроллера при подъеме и спуске грузов. Напряжение к двигателю подводится в обоих случаях через контакты контакторов КМ1, КМ2. При подъеме грузов якорь и обмотка возбуждения соединяются последовательно, и регулирование скорости производится изменением сопротивления R1 – R6. В процессе спуска грузов якорь двигателя и обмотка возбуждения включаются параллельно по так называемой схеме безопасного спуска, позволяющей осуществить низкие посадочные скорости. Р – рубильник подачи напряжения, SВ1 – кнопка «Пуск», SВ2 – кнопка «Стоп», SА1 – включение сети управления. На Рис. 3 б представлен общий вид характеристик при подъеме и спуске грузов. Каждому положению контроллера соответствует определенная характеристика, имеющая то же цифровое обозначение. Характеристика 1 подъема груза соответствует первому положению контроллера и получается при зашунтированном сопротивлении R2 и введенном в цепь якоря R3-R6. На всех поло8 жениях спуска последовательно с якорем включены сопротивления R7 и R1. При опускании грузов характеристика 1 получается путем введения сопротивления R1-R3 последовательно с якорной сетью, и в цепи обмотки возбуждения. На следующих положениях контроллера последовательно вводятся дополнительные сопротивления в цепь обмотки возбуждения. Причем до положения 4 общее дополнительное сопротивление, включенное последовательно с сетью, остается неизменным (R1-R3), а, начиная, с положения 5 оно начинает выводиться. В положении 6 обмотка возбуждения включается в сеть независимо от якоря, двигатель имеет в данном случае механическую характеристику, подобную двигателю независимого возбуждения. Это исключает при соответствующем подборе сопротивлений значительное повышение скорости спуска грузов. а 9 б Рис. 3. а) Принципиальная схема управления двигателем последовательного возбуждения с кулачковым контроллером; б) Развернутые схемы и характеристики двигателя для различных положений контроллера Тяжелые грузы в случае применения схемы рис. 3 а спускаются в генераторном режиме (тормозной спуск) положения 1-6 «спуска». При этом контроллерное управление обеспечивает плавное регулирование и низкие скорости опускания груза. Когда легкие грузы не могут спускаться за счет собственного веса вследствие того, что создаваемый ими момент меньше момента трения, 10 двигатель создает дополнительный момент, преодолевающий совместно с грузом момент трения (силовой спуск). Перевод маховичка контроллера при спуске грузов в нулевое положение (характеристика 0) сопровождается генераторным торможением двигателя с самовозбуждением, так как при отключении двигателя от сети, если двигатель под влиянием веса начинает при спуске вращаться, то э.д.с. якоря создает в обмотке возбуждения ток, который по направлению будет соответствовать протекавшему ранее и возбудит машину. Если двигатель работал на подъем груза, то перевод маховика контроллера в нулевое положение не вызовет динамического торможения, хотя соответствующая цепь будет создана. В этом случае при замыкании цепи машина будет размагничена. Такая последовательность в работе схемы определяется технологическими условиями, ибо при подъеме совместное действие грузового момента, а также моментов, создаваемых тормозами и двигателем, может вызвать недопустимое замедление груза. При пуске грузовой момент и моменты от тормозов и двигателя действуют в противоположные стороны, не вызывая чрезмерных замедлений. Тормозные колодки при наличии электрического торможения подвергаются меньшему износу. Наличие режима динамического торможения двигателей постоянного тока на подъемных механизмах кранов является одним из преимуществ перед двигателями переменного тока, так как тормозной режим возможен и при отключении питающей сети. Для механизмов горизонтального передвижения вполне удовлетворительными являются характеристики, аналогичные приведенным на рис. 3 б, при подъеме грузов. Для получения таких характеристик на двигателях механизмов передвижения устанавливаются симметричные контроллеры. Схема 4. Магнитный контроллер типа ПС Для управления электроприводами механизмов мощных ответственных кранов с тяжелым режимом работы применяются магнитные контроллеры типа ПС (рис. 4 а). Посредством магнитного контроллера можно получить четыре 11 ступени регулирования скорости при работе на подъем и четыре – при спуске грузов. Кроме того, при установке командоконтроллера в нулевое положение после спуска осуществляется динамическое торможение двигателя. Схема включения командоконтроллера несимметричная. Поэтому получаются разные характеристики двигателя при подъеме и спуске грузов. На рис.4 б приведены развернутые схемы управления для всех положений командоконтроллера, а также механические характеристики двигателя, соответствующие каждому положению командоконтроллера. Пунктиром обозначены механические характеристики, соответствующие промежуточным состояниям схемы, когда командоконтроллер установлен в определенное положение, но вследствие наличия реле времени переключения в схеме происходят не мгновенно, а в одну и даже несколько ступеней. Катушка линейного контактора КМ4 в схеме рис.4 а получает питание через контакты SA3 командоконтроллера при подъеме груза и через SA2 – при опускании. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель SQ1, контакты которого введены в цепь SA3. Во всех положениях рукоятки командоконтроллера SА при работе двигателя на подъем включены катушки контакторов КМ4 и КМ6. В первом положении при подъеме в главную цепь вводятся дополнительные сопротивления r1, r2, r3, а якорь и обмотка возбуждения шунтируются посредством размыкающего контакта КМ10.1 сопротивлением r4, что дает возможность получить более глубокое регулирование скорости при подъеме (см. характеристику 1), чем при простом реостатном регулировании. При подъеме грузов на всех положениях командоконтроллера резисторы r6, r7 шунтируются контактором КМ13. В положении 2 рукоятки командоконтроллера включается контактор КМ7, который шунтирует сопротивление r1 (см. характеристику 2) и замыкает цепь катушки реле ускорения КМ3, подготавливая ее к работе. Контакт последней подготавливает к включению цепь катушки контактора КМ8. В положении 3 получает питание катушка контактора КМ10, вследствие чего отключается сопротивление r4, шунтирующее главную цепь, в которую 12 теперь включены только сопротивления r2, r3, вследствие чего двигатель работает на обычной реостатной характеристике 3 и получит питание катушка КМ3. При установке рукоятки в положение 4 последовательно включаются контакторы ускорения КМ8 и КМ9, двигатель будет работать при этом вначале на промежуточной характеристике 4а, а затем на естественной характеристике 4. При быстром переводе рукоятки командоконтроллера непосредственно в положение 4 контроль за работой двигателя производится посредством реле ускорения КМ3, которое замыкает свои контакты, когда двигатель достигает 60 – 70% номинальной скорости. Катушки контакторов КМ8 и КМ9 получат питание только после того, как замкнется контакт КМ3.1. Аналогично будет работать реле КМ3 и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза. При спуске груза во всех положениях командоконтроллера включены контакторы КМ4, КМ10, КМ11 и КМ5, а в 1-2 положении включен КМ13 и в 1-3 положении – КМ12. В схеме предусмотрена блокировка катушки контактора КМ5 замыкающим контактом КМ11.1 для предотвращения свободного падения груза, так как при отключенном КМ11 и включенном КМ5 двигатель не будет создавать тормозного момента, а электромеханический тормоз YВ1 поднимет колодки. В положении 1 спуска включены контакторы КМ8, КМ9, КМ12 и КМ13, в связи, с чем оказываются зашунтированными все добавочные резисторы схемы, кроме r1 и r5. В результате включения контакторов КМ11 и КМ5 якорь двигателя и обмотка возбуждения будут включены параллельно по схеме безопасного пуска с минимальными сопротивлениями во всех цепях (рис.4 б), характеристики двигателя становятся более жесткими, чем при обычной схеме включения двигателя последовательного возбуждения, вследствие чего ограничивается скорость вращения при спуске грузов. В положении 2 рукоятки командоконтроллера разорвется контакт SA9, и потеряют питание катушки контакторов ускорения КМ8 и КМ9, в цепь якоря будут введены дополнительные сопротивления r2 и r3. Увеличение сопротив13 ления в цепи якоря приводит к уменьшению скорости в двигательном режиме и возрастанию в генераторном. В положении 3 разорвется контакт SA12, прекратится питание катушки контактора КМ13 и в цепь возбуждения будет введено дополнительное сопротивление r7, уменьшающее ток возбуждения машины. При неизменном опускаемом грузе вследствие сохранения тормозного момента, создаваемого машиной, скорость груза должна возрасти по сравнению со скоростью во втором положении рукоятки командоконтроллера. Перевод рукоятки командоконтроллера в положение 4 приведет к включению контакторов ускорения КМ7, КМ3 через r4, r6, КМ8, КМ9, которые зашунтируют соответственно сопротивления r1, r2, r3 в якорной цепи двигателя. Так как при этом разорвется контакт SA11, потеряет питание катушка контактора КМ12, и в цепь обмотки возбуждения будет введено дополнительное сопротивление r6, которое снизит величину тока возбуждения. Двигатель при такой схеме включения будет иметь характеристику 4, соответствующую независимому возбуждению. Характеристики 4 а, 4 б получаются в результате кратковременной работы двигателя с введенными сопротивлениями r2, r3. Отметим также, что в этом положении командоконтроллера срабатывает реле КТ2, катушка которого получает питание через контакты SA7 и замыкающий контакт КМ7.1, и получит питание реле КТ1. Катушка последнего включена параллельно r6. 14 а) 15 б) Рис. 4. а) Схема магнитного контроллера типа ПС с управлением пуском по принципу скорости и торможением по принципу времени; б) Развернутые схемы и механические характеристики двигателя, управляемого магнитным контроллером ПС. Остановка двигателя при спуске может быть достигнута путем постепенного перевода рукоятки командоконтроллера из четвертого положения в первое, двигатель в этом случае будет работать на тех же характеристиках, что и при прямом движении рукоятки. Если необходима быстрая остановка груза при спуске, то рукоятка сразу переводится в нулевое положение, вследствие чего теряют питание катушка контактора КМ5 и реле КТ2. Якорь двигателя, его обмотка возбуждения, электромагнит тормоза отключаются от сети и замыкаются посредством контактора КМ11 на контур, состоящий из сопротивлений r2, r3, 16 r5, r7. Машина будет работать в режиме генераторного торможения с самовозбуждением на характеристике Оа. Через 0,4 – 0,6 сек, отпадает якорь реле КТ1, катушка которого шунтируется контактами КМ12.1, при этом включится контактор КМ13, выводящий r7 из контура торможения (характеристика Об). Затем за счет последовательного выведения сопротивлений r2, r3 на этом положении получаются характеристики Ов, Ог. Через 0,7 – 1,0 сек КТ2 разомкнет свой контакт в цепи катушек КМ10, КМ11. При этом якорь двигателя с обмоткой возбуждения будет замкнут на сопротивление r4, и будет работать на характеристике О. В последнем случае к тормозному усилию создаваемому двигателем прибавляется усилие тормоза, так как его катушка не обтекается током. Схема 5. Магнитный контроллер типа КС На рис.5 а приведена принципиальная схема одной из модификаций электропривода переменного тока с магнитным контроллером типа КС, который применяется на крановых механизмах с высокой частотой включений. Схема магнитного контроллера КС предусматривает реостатное регулирование скорости асинхронного электродвигателя при подъеме груза, а также работу в режиме силового и тормозного спуска. В нулевом положении рукоятки командоконтроллера контакты контакторов КМ13 и КМ15, управляющих электромагнитом тормозаYB, разомкнуты. Катушка реле KM14 через форсировочный резистор R и обмотку YB попадает под напряжение, достаточное для срабатывания КМ14. Реле KM14 своим замыкающим контактом включает контактор KМ13, который своими контакторами КМ13.1 шунтирует R и позволяет срабатывать электротормозу YВ. Кроме того, катушка КV1 получит питание, если не будет к.з., т.е. не сработает КA, но уже будет напряжение и сработает реле КV2, тогда замкнется контакт КV1.1, поставив на самоблокировку КV1 и подавая питание на всю остальную схему управления. При переводе рукоятки командоконтроллера с нулевого положения и включении реверсирующих контакторов КМ3 или КМ6 срабатывает контактор 17 КМ15. Обмотка тормозного электромагнита YB подключается на полное напряжение сети, а катушка реле КМ14 контактом КМ15.1 замыкается накоротко. Реле КМ14 обеспечивает выдержку времени, несколько большую времени включения тормозного электромагнита YB. После отпадания якоря реле КМ14 его замыкающий контакт КМ14.1 отключает катушку контактора КМ13, вследствие чего в цепь YB вводится сопротивление. В момент включения тормозного электромагнита к его обмотке подводится напряжение, большее номинального, вследствие чего достигается форсирование процесса включения. Потери в катушке электромагнита после включения снижаются введением ограничивающего резистора. Защита электропривода осуществляется наличием в магнитном контроллере КС блокировки, предотвращающей включение двигателя на подъем груза, если в предшествующий рабочий период произошло приваривание одного из контакторов ускорения KM10, KM11, KM12. На положении командоконтроллера 1, как и на всех последующих, при подъеме грузов, кроме контактора KM15, включаются контакторы направления KM4, KM3 и противовключения KM8. Далее при передвижении рукоятки командоконтроллера последовательно включаются контакторы ускорения KM9, KM10, KM11, KM12. Последние два включаются с выдержкой времени, которая обеспечивается реле ускорения KM1, KM2. Механические характеристики двигателя, соответствующие каждому положению командоконтроллера при подъеме и спуске грузов, приведены на рис. 5 б. Объективный контроль над процессом пуска двигателя осуществляется реле ускорения, а не оператором. Это позволяет быстрее и надежнее управлять краном, защищать двигатель от возникновения чрезмерных токов, вызывающих при частых включениях его перегрев и выход из строя. Кроме того, снижаются динамические усилия на канатах и редукторах, что увеличивает срок службы механического оборудования крана. 18 а 19 б Рис. 5. а) Принципиальная схема магнитного контроллера типа КС б) Механические характеристики асинхронного двигателя, управляемого магнитным контроллером типа КС В положении командоконтроллера 3 при опускании груза включается контактор KM6, в результате чего срабатывают блокировочное реле KM7 и контакторы КМ15 и KM8, а за ними – контакторы КМ3, KM9. Статор двигателя подключается к двум фазам сети контакторами KM3, KM6. Положению 3 соответствует характеристика СЗ (рис. 5 б), она относительно пологая и при нагрузках от 0 до 100%МН позволяет получить скорость, не превышающую допустимую. Указанное обстоятельство повышает надежность работы электропривода 20 и дает возможность оператору работать с меньшим напряжением. Наличие характеристики СЗ также существенно отличает магнитный контроллер КС от ТС. Если скорость опускания груза на положении 3 не обеспечивает необходимого режима работы, в магнитном контроллере КС имеются возможности изменить ее. При передвижении рукоятки командоконтроллера к нулю можно получить две характеристики противовключения С2 и С1. Последняя используется для спуска относительно тяжелых грузов. Положение 4 обеспечивает получение основной и промежуточной характеристик С4, которые пригодны для силового спуска легких грузов или для работы со скоростью выше синхронной при спуске тяжелых грузов. Схема 6. Управление электроприводом замыкающей лебедки В настоящее время на действующих перегружателях наибольшее распространение имеет система генератор-двигатель. Она относительно проста в управлении, надёжна в работе и обеспечивает благоприятный характер протекания переходных режимов. В тяжёлых условиях эксплуатации перегружателей система Г-Д зарекомендовала себя с положительной стороны. Электропривод передвижения тележки перегружателя не имеет каких-либо особенностей, отличных от аналогичных крановых приводов. Следует отметить только, что маховые массы тележки, приведённые к валу двигателя, в 10 раз и более превышают маховый момент ротора двигателя. Поэтому пуск и торможение двигателя затянуты во времени. В ряде случаев время переходных процессов сравнимо со временем цикла работы. Это требует применения электропривода, позволяющего получить оптимальный по ускорению и времени характер протекания переходных процессов, что и осуществляется системой Г-Д. Значительный интерес представляет электропривод грейферного подъёма. Рабочие операции грейфера производятся с помощью двух лебёдок, каждая из которых приводится в движение двигателем постоянного тока, управляемым по системе Г-Д. Электропривод грейфера должен удовлетворять следующим требованиям: регулирование скорости при диапазоне Д=(5÷8):1, согласование ме21 ханических характеристик; ограничение момента двигателя при стопорении для предохранения канатов и механического оборудования от недопустимой перегрузки. Переходные процессы должны протекать плавно, без превышения допустимых ускорений. В соответствии с техническими требованиями для электропривода грейферных механизмов применяется чаще всего система Г-Д с управляющим возбудителем, схема, которой приведена на рис. 6. Возбудитель В имеет три обмотки управления – задающую Ш1, обмотку положительной обратной связи по напряжению генератора Ш3. Ограничение тока в цепи якорей главных машин обеспечивается обмоткой Ш2, с помощью которой осуществляется отрицательная обратная связь по току якоря. Большинство аппаратов защиты и блокировки встречалось уже в рассмотренных ранее схемах магнитных контроллеров. Вследствие этого их работа не требует дополнительных пояснений. На рис.6 б приведены характеристики электропривода при подъёме и спуске грейфера в различных режимах работы. Характеристиками при подъёме являются П1, П2 и П3, а при спуске – С1, С2, С3, и С4. характеристика С5 имеется только у электропривода механизма замыкания и служит для быстрого раскрывания грейфера при спуске с максимальной скоростью. Для плавного перехода с одной характеристики на другую в схеме имеются реле времени KL1, KL2, KL3, которые позволяют осуществить переключения в схеме через промежуточные положения с введением дополнительных ступеней регулирования, снижающих толчки тока в главной цепи при переключениях. Система Г-Д, применяемая для привода механизмов переключателей, имеет преимущественное распространение перед другими системами электропривода. 22 + KM3.2 - Ш1 KM7.2 KM8.1 KM2.3 KM2.4 KM3.3 Д KA1 ОВД KA2 KV1 Ш2 Г ОВГ KL3.2 В KL2.2 KM2.2 KM7.1 KM4.1 KM11.1 KM10.1 KM9.1 23 KM4.2 Ш3 KM4.3 KM4.4 а 24 б Рис. 6. а) Схема управления электроприводом замыкающей лебёдки б) Механические характеристики электропривода замыкающей лебедки Схема 7. Управление электроприводом маятниковой канатной дороги При выборе электропривода канатной дороги очень важным является предварительное упреждение его режимов работы в соответствии с уклонениями трассы и загрузки в течение рабочего периода. Электропривод может работать только в двигательном режиме, осуществляя подъем грузов, только в генераторном режиме, производя спуск грузов, и со знакопеременной нагрузкой, когда, например, за рабочую смену характер нагрузки несколько раз меняется и двигатель работает то в генераторном, то в двигательном режиме или в двигательном режиме «вперед-назад» по местности с малыми уклонами. 25 В тех случаях, когда электропривод работает только в двигательном режиме, но «вперед» и «назад» при горизонтальной добавке грузов применяется асинхронный двигатель с контактными кольцами и относительно простая схема управления с многоступенчатым пусковым реостатом (рис. 7.1). Управление пуском двигателя осуществляется посредством командоконтроллера, контакты которого введены в цепи катушек реверсивных контакторов KM7 – SA2 и KM8 – SA3 и контакторов ускорения KV1-KV8. Контроль пуска двигателя осуществляется электромагнитными реле времени KT1–KT8, катушки которых получают питание от выпрямителей. Напряжение к силовым контактам KM7.2-KM7.4 и KM8.2-KM8.4 подводится через автомат KM1 с катушкой минимального напряжения. Включение двигателя может быть произведено в том случае, когда закрыт контакт КМ9.1 реле контроля пуска KM9, контакт КМ1.1 автомата KM1, контакт КМ10.1 центробежного реле KM10 и контакт КМ6.1 промежуточного реле KM6, тогда, если нажать кнопку SB2 (Включено) в цепи контакта SA1 закрытого в нулевом положении командоконтроллера получит питание реле КМ4. Если нажать кнопку SB2 «Пуск» в цепи контакта SA1 командоконтроллера, включенного в нулевом положении, получат питание реле КМ5, КМ6. Заметим, что в схему между точками а и б включается ряд блокировочных контактов, которые должны быть закрыты при пуске. Эти контакты вводятся в цепь по соображениям техники безопасности, они фиксируют готовность участков дороги к работе и нормальное техническое состояние отдельных ее узлов (например, натяжение тянущих и несущих канатов). Пуск канатной дороги может быть произведен только по распоряжению диспетчера, который запрашивает сведения о готовности участков дороги к пуску и, только получив подтверждение готовности, дает сигнал на включение. Такая система пуска необходима для предупреждения возможных несчастных случаев на дороге. После срабатывания реле KM4 получит питание КМ5 и включается электромагнит тормоза YB, колодки которого отпускают тормозной шкив, и электродвигатель может быть включен. При этом его установившаяся скорость бу26 дет определяться величиной пускового сопротивления и, следовательно, положением рукоятки командоконтроллера. Пусковые сопротивления рассчитываются обычно на длительный режим работы, так как электропривод должен обеспечивать движение на низкой скорости при опробовании, наладке и ремонте дороги. Схема включения реле ускорения KV1-KV8 составлена таким образом, что указанные реле срабатывают не только в функции от времени; при их работе осуществляется и контроль по току статора двигателя. Для этой цели в схеме используется токовое реле KM3. Контакт реле закрывается при возрастании тока во время включения двигателя и при выведении ступеней сопротивления. В период снижения тока контакт реле KM3.1 открывается. Когда контакт реле KM3.1 закрыт, получает питание катушка очередного реле ускорения. Достигается это наличием парных замыкающих и размыкающих контактов KV1, KV2 и т.д. в цепях катушек реле ускорения. До начала пуска все катушки реле ускорения, кроме KT1, получают питание через размыкающие контакты контакторов ускорения KV1-KV8. Катушка реле KV1 получает питание в первый момент после включения двигателя в результате срабатывания реле KM3. Отсчет выдержки времени любого реле ускорения KT1-KT8 начинается только после того, когда ток двигателя станет меньше тока отпускания KM3. После отпускания реле ускорения с выдержкой времени включаются соответствующие контакторы ускорения. 27 Рис. 7.1. Схема управления асинхронным электроприводом маятниковой канатной дороги 28 Рис. 7.2. Пусковая диаграмма асинхронного электропривода канатной дороги Максимальная защита в схеме осуществляется реле KM2, размыкающий контакт которого включен в цепь катушки реле времени KM9. На период пуска контакт KM2.1 шунтируется замыкающим контактом KT8, который открывается с выдержкой времени по окончании пуска двигателя. Если ток статора в процессе работы превосходит допустимую величину, то контакт KM2 открывается, катушка реле KM9 теряет питание, с выдержкой времени открывается его контакт в цепи реле KM4. Двигатель при этом отключается от сети, и система затормаживается тормозным устройством. В случаях аварий на линии, связанных с повышением скорости или механическими повреждениями, которые фиксируются защитными или блокировочными аппаратами, электрические тормоза накладываются мгновенно. На рис. 7.2 приведены пусковые характеристики асинхронного электропривода канатной дороги. Пуск двигателя производится в восемь ступеней, что позволяет снизить величину колебаний момента двигателя при переключениях, а значит, и уменьшить колебания ускорений при пуске. Для рассматриваемой диаграммы пусковой момент колеблется в пределах (1,1-1,7)МH, т.е. отклонения момента от среднего значения составляют 21,5%. При полностью введенном в 29 цепь ротора сопротивлении и при замкнутом контакторе KV1 двигатель развивает момент меньше номинального. Эти две ступени служат для выбора люфтов в редукторе и слабины в канатах и при автоматическом пуске используются кратковременно. Схема 8. Управление асинхронным электродвигателем кольцевой канатной дороги Применение асинхронных электродвигателей на канатных дорогах целесообразно в том случае, когда производится спуск грузов и возможна рекуперация энергии в сеть. Пуск в данном случае обычный реостатный, по окончании которого сопротивление шунтируется и двигатель, работая в рекуперативном режиме, осуществляет торможение спускающегося груза. Здесь существуют также и другие требования к процессу торможения дороги при остановке. Если просто отключить двигатель и наложить тормозные колодки, то вся энергия движущихся масс должна быть погашена в тормозном устройстве, что усложняет конструкцию и снижает его надежность. Потому применяется электродинамическое торможение, а тормозные колодки накладываются при скорости порядка 0,1Н. На рис. 8.1 приведена схема управления асинхронным электроприводом кольцевой канатной дороги. Электропривод работает с рекуперацией энергии в сеть в нормальном режиме, а также в режиме динамического торможения при отключении от сети. Управление двигателем осуществляется посредством командоконтроллера и универсального переключателя SA. Постоянный ток к статору подводится от полупроводникового выпрямителя через контактор КМ6. К сети 380 В выпрямитель подключается контактором КМ5. В нулевом положении командоконтроллера включается реле КМ2, через замыкающие контакты которого в дальнейшем питаются все цепи управления. Не останавливаясь подробно на действии блокировочной цепочки с реле КМ2, отметим только, что между точками а и б включаются блокировочные аппараты, исключающие пуск 30 двигателя, если дорога не подготовлена к работе и диспетчер не дал разрешения на ее включение. Рис. 8.1. Схема управления асинхронным электроприводом канатной дороги с рекуперацией энергии и динамическим торможением 31 Пуск двигателя осуществляется при постановке универсального переключателя SA8 в правое положение, при котором замкнуты две нижние пары контактов. Рукоятка командоконтроллера также перемещается вправо, переходя последовательно все положения. В первом положении включается контактор КМ3, а значит, и тормозной электромагнит YB. Затем, если исправны контакторы ускорения, через их размыкающие блокировочные контакты получает питание катушка линейного контактора КМ4. Срабатывание последнего приводит к подключению статора двигателя к сети переменного тока. Во втором положении производится контрольное включение КМ5, при котором загорается сигнальная лампа, указывающая на наличие напряжения постоянного тока и готовность установки к тормозному режиму. В четвертом положении включается реле времени КТ1, которое с выдержкой времени около 10 с включает контактор КV7, вследствие чего выводятся все сопротивления в цепи ротора. Дальнейшее движение рукоятки командоконтроллера не вносит изменений в схему управления. Пусковой режим, таким образом, осуществляется при одной ступени сопротивления в цепи ротора. В том случае, когда скорость двигателя достигает номинального значения раньше, чем реле времени КТ1 замкнет свой контакт, замыкается контакт пускового центробежного реле КЦ1.2 и подается напряжение к катушке контактора КV7. По окончании пуска загорается соответствующая сигнальная лампа, а переключатель SA8 ставится в положение «Работа», вследствие чего отключается контактор КМ5, для того чтобы не производился излишний нагрев выпрямителей. Остановка канатной дороги производится в следующем порядке. Прежде всего, рукоятка SA8 поворачивается вправо, и включается под напряжение катушка контактора КМ5, а цепь катушки контактора КМ4 готовится к отключению. Затем рукоятка командоконтроллера переводится в нулевое положение, вследствие чего отключаются линейный контактор КМ4, реле КТ1 и контактор KV7. Контакторы КМ5 и КМ3 остаются включенными. При последующей установке командоконтроллера в положение 3 включается контактор динамического торможения КМ6, и следом за ним без выдержки времени срабатывает 32 контактор KV1. Для управления динамическим торможением рукоятка командоконтроллера вновь перемещается вправо. Если она задерживается в положении 3 или 4, то двигатель будет далее работать в режиме динамического торможения на характеристике 2 (рис. 8.2), т.к. контактор KV2 с выдержкой времени зашунтирует вторую ступень сопротивления в цепи ротора. Далее, передвигая рукоятку контроллера в положения 5 и 6, можно получить две устойчивые тормозные характеристики при срабатывании контакторов ускорения KV3 и KV7, а также переходные, обусловленные последовательным срабатыванием контакторов ускорения KV4, KV5, KV6. Остановка производится нажатием на кнопку SB2 «Стоп». Уставки реле времени рассчитываются в соответствии с техническим заданием на длительность торможения, которая выбирается обычно в пределах 1530 с. После выхода двигателя на низкую скорость при работе на характеристике 7 любым выключателем в цепи катушки реле КМ2 схема управления может быть отключена от сети, в результате чего на тормозной шкив будут наложены колодки. На рис. 8.2 приведены характеристики асинхронного электропривода канатной дороги с активным моментом на валу. Пуск двигателя осуществляется на характеристике 1’, нормальная работа в генераторном режиме – на естественной характеристике, при остановке двигатель работает в режиме динамического торможения на характеристиках 1-7. Рис.8.2. Механические характеристики асинхронного электропривода канатной дороги при пуске, нормальной работе и динамическом торможении 33 Схема 9. Согласованное управление несколькими электродвигателями конвейеров Схема электропривода нескольких конвейеров, движущихся с одинаковой скоростью, изображена на рис. 9. Привод конвейеров осуществляется асинхронными двигателями M1 и M2. Число последних может быть увеличено при большем количестве конвейеров без принципиальных изменений схемы. Статорные обмотки двигателей конвейеров включаются в сеть переменного тока постоянной частоты f1. Роторные обмотки двигателей питаются от асинхронного преобразователя частоты АПЧ, который приводится во вращение двигателем M через вариатор В. Статорные обмотки M и АПЧ подключаются также к сети переменного тока постоянной частоты f1. Для пуска двигателя M в его роторной цепи предусмотрен пусковой реостат с тремя контакторами ускорения КМ8, КМ9, КМ10. Защита двигателей M, M1 и M2 от перегрузки осуществляется тепловыми реле КК1, КК2, КК3. Двигатели конвейеров в случае необходимости могут быть отключены от общей системы с помощью двух рубильников. Скорость ротора АПЧ в рассматриваемой системе может изменяться вариатором В. В некоторых установках применяется регулирование скорости АПЧ путем изменения сопротивления в цепи ротора M. Двигатели M1, M2 в системе согласованного вращения, приведенной на схеме, являются машинами двойного питания, скорость их определятся выражением: 0 2 ( f 1 f 2) , p n0 60( f 1 f 2) . p Если двигатели конвейеров и АПЧ подключены к сети, причем последний находится в неподвижном состоянии, то частоты статорной и роторной цепей двигателей равны, следовательно, двигатели будут находиться в состоянии покоя. После того как ротор АПЧ начнет вращаться, например, в направлении вращения его поля, частота на его кольцах уменьшится, и скорость двигателей конвейеров будут пропорциональна разности частот f1-f2. В случае вращения ротора АПЧ против направления вращения поля его статора скорость приводных двигателей определяется разностью частот f2-f1, так как частота f2 будет больше f1. 34 Рис. 9. Схема включения двигателей при согласованном движении нескольких конвейеров 35 При равных нагрузках двигатели конвейеров будут вращаться с одинаковыми скоростями, векторы э.д.с. их роторов сдвинуты при этом на одинаковый угол относительно вектора э.д.с. ротора АПЧ. Увеличение нагрузки на валу одного из двигателей приводит к возрастанию угла рассогласования между э.д.с. его ротора и э.д.с. ротора АПЧ, при этом увеличивается ток ротора двигателя, а, следовательно, и его момент. Все двигатели в приведенной системе согласованного вращения будут работать с одинаковой скоростью, а роторы их будут сдвинуты в пространстве относительно ротора АПЧ на некоторые углы в соответствии с нагрузкой каждого конвейера. Перед пуском двигателей конвейеров необходимо, чтобы операторы каждого конвейера нажали кнопки готовности Sb4, Sb6. При этом промежуточные реле КМ11, КМ12 замкнут свои контакты КМ11.1, КМ12.1 в цепи реле пуска КМ1. При включении кнопки Sb2, реле КМ1 замкнет свой контакт КМ1.2 в цепи катушки линейного контактора КМ2, который, включившись, подаст питание на две фазы через ограничивающий резистор R к статорным обмоткам АПЧ и двигателей конвейеров. Эта операция необходима для того, чтобы роторы машин заняли синфазное положение, что исключает возникновение больших бросков тока и выпадение машин из синхронизма при пуске. С выдержкой времени, обеспечивающей поворот ротора двигателей и АПЧ в синфазное положение, сработает маятниковое реле времени КМ2.5, пристроенное к контактору КМ2, контактор КМ3 при этом включится, а контактор КМ2 отключится. Частоты статорных и роторных цепей двигателей конвейеров будут одинаковыми, и двигатели останутся в неподвижном состоянии. Вслед за контактором КМ3 с выдержкой времени, создаваемой маятниковым реле КМ3.6, которое пристроено к КМ3, включится контактор КМ4, и начнется пуск двигателя M. Контроль за пуском двигателя M осуществляется по принципу независимой выдержки времени реле КМ5, КМ6, КМ7, и контакторами ускорения КМ8, КМ9, КМ10. По окончании процесса пуска системы некоторое изменение скорости двигателей конвейеров в зависимости от требований производственного процесса можно производить путем изменения пере36 даточного отношения вариатора. Отключение всей системы производится кнопками Sb1, Sb3, Sb5. Схема 10. Автоматизированное управление и сигнализация поточнотранспортной системы Принципиальная схема управления поточно-транспортной системы (рис. 10) позволяет осуществлять местный и централизованный режим управления, выбираемый командоконтроллером SA1 (рис. 10. а, б). При выборе местного управления (положение М) контакты командоконтроллера отключают схему дистанционного управления и подается питание на реле местного управления КМ1, через замыкающие контакты которого подготавливаются пусковые цепи пяти двигателей. Их пуск и остановка в этом случае производятся кнопками “Пуск” и “Стоп” по месту. На рис. 10 в показаны цепи одного двигателя транспорта. Дистанционное управление с пульта диспетчера всего производственного процесса осуществляется при положении Д2 SA1, а управление с пульта линии транспортёров при положении Д1 SA1. Нажимая на кнопку SB1 или SB2, диспетчер подаёт командный импульс на пуск линии транспортёров. При этом получают питание реле пуска линии КМ2 и КМ3. Контакт КМ2.1 шунтирует пусковую кнопку, а КМ2.2 подает питание на моторное реле времени КТ1, которое с некоторой выдержкой времени своим контактом КТ1.3 включает промежуточное реле управления КМ7 транспортера, расположенного последним по направлению грузопотока. Реле КМ7 контактом КМ7.1 включает контактор КМ15, который в свою очередь включает двигатель М5. После того, как двигатель достигнет номинальной скорости, установленное на транспортёре реле скорости KS1 контактом KS1.1 зашунтирует контакт КМ2.3 пускового реле, а контактом KS1.2 включит промежуточное реле КМ8. Контакт КМ8.2 подаёт питание на контактор КМ16, который включит двигатель M4. Наличие реле скорости позволяет пустить последний транспортёр только по достижении предыдущим полной скорости. 37 Включение двигателей следующих транспортёров осуществляется аналогично изложенному. После пуска последнего транспортёра его реле скорости KS5 отключает пусковое реле КМ2 и КМ3 контактом KS5.2, которые разомкнут контакты в цепях промежуточных реле КМ7-КМ11, что обеспечивает своевременное их отключение как при отключении соответствующих им контакторов, так и при пробуксовке ленты транспортёра, когда снижается скорость ленты и отключается соответствующее реле скорости. При нажатии на кнопку остановки SB3 (или SB4) подаётся питание на реле остановки КМ4, контакт КМ4.1 которого шунтирует кнопку остановки. КМ4.2 включает реле времени КТ1, КМ4.3 отключает реле КМ12 блокировки пуска питателя. КМ12 отключает питатель, подающий материал на головной транспортёр, прекращая этим подачу груза. С выдержкой времени, достаточной для полной разгрузки всех транспортёров, реле времени КТ1 своим контактом КТ1.2 подаёт питание на реле остановки линии КМ6, которое контактом КМ6.1 отключает реле КМ7-КМ11, отключающие в свою очередь контакторы КМ15-КМ19 соответствующих приводных двигателей. Аварийная остановка без предварительной разгрузки линии осуществляется при переводе командоконтроллера SA1 в положение 0. Остановка любого двигателя возможна также при помощи кнопок “Стоп” установленных вдоль линии. Информацию о состоянии и работе механизмов диспетчер получает при помощи схем световой и звуковой сигнализации (рис. 10 б). 38 а 39 б 40 в Рис. 10. Схема автоматизированного управления и сигнализации поточно-транспортной системы Устройство световых табло: HL6 – управление диспетчером линии транспортёров, HL7 – управление диспетчером производственного цикла, HL8 – местный режим управления. Сигнализация работы транспортёров осуществляется лампами HL1-HL5. Кроме световой сигнализации схемы предусмотрена звуковая сигнализация звонком Call. Перед пуском линии проверяется исправность всех сигнальных ламп табло HL1-HL8 переводом командоконтроллера SA2 в положение 2. При этом лампы из-за наличия в их цепи диодов горят часто мигающим светом, что необходимо для отличия режима проверки сигнализации от рабочего режима. Затем SA2 переводят в положение 1 «Работа». По мере пуска двигателей загораются соответствующие лампы HL1-HL5 и продолжают гореть ровным светом на протяжении всего времени работы транс41 портёров. Возможно отключение сигнальных ламп переводом SA2 в положение 0, но аварийная сигнализация при этом сохраняется. При аварийном отключении какого-либо транспортёра отключаются все транспортёры предшествующие аварийному, а, следовательно, КМ11 теряет питание. При этом промежуточное реле КМ11 контактом КМ11.3 включает реле КМ14 аварийной сигнализации, которое контактом КМ14.1 включает звонок Call и импульсный датчик – пульс-пару из двух реле времени КТ2 и КТ3. КТ3 питается через выпрямительный мост UZ и контактом КТ3.1 включает КТ2. Через контакт КТ3.2 периодически подаётся напряжение на шину аварийной сигнализации, вследствие чего лампа аварийного конвейера мигает с небольшой частотой, а лампы всех отключенных предыдущих конвейеров не горят. Аварийный сигнал можно отключить кнопкой SB5, контакты которой разрывают цепь катушки КМ13 сигнального блокировочного реле. Схема 11. Управление электроприводом эскалатора На рис. 11 б приведён один из вариантов схемы управления двигателем эскалатора метрополитена. Двигатель может быть включен (рис. 11 а) для работы на подъем и спуск соответственно контакторами КМ13 и КМ14. Включение обмотки статора двигателя в треугольник или звезду производится контакторами KM18 и KM19. Третий контактор KM15 в цепи статора обеспечивает отключение двигателя от сети в случае приваривания контактов контакторов направления KM13 и KM14. Пуск двигателя осуществляется в четыре ступени. Пусковые сопротивления выводятся по принципу независимой выдержки времени контакторами ускорения KV1, KV2, KV3, KV4. К трем первым из них пристроены маятниковые реле времени. Остановка эскалатора при нормальном отключении двигателя происходит под действием двух электромеханических тормозов: рабочего YB1 и предохранительного YB2. Наличие последнего определяется высокими требованиями техники безопасности к установкам с большим количеством пассажиров. Кроме того, в системе имеется механический аварийный тормоз, ко42 торый срабатывает при нарушении связи между двигателем и валом механизма, осуществляя торможение последнего. В схеме предусмотрены три вида защиты двигателя: от перегрузки, коротких замыканий и обрыва фаз, которые осуществляются соответственно реле KM3; KM1; KM2 и KM4, KM5, KM6. Контроль над температурой подшипников осуществляется термическим реле KK1. В некоторых вариантах схем максимальная токовая защита и защита от перегрузки выполняются соответствующими расцепителями автомата QF. Включение двигателя эскалатора может быть произведено в том случае, когда механическое и электрическое оборудование исправно. Для контроля состояния указанного оборудования служит ряд блокировочных и защитных аппаратов, контакты которых вводятся в одну блокировочную цепочку. Включение промежуточных контакторов KM7 или KM8 может быть произведено кнопками SB1 или SB2, если закрыты контакты промежуточных реле KM10, KM12, контакты реле контроля пуска KM11 и центробежного реле КМ20. Кроме того, должны быть закрыты контакты кнопок SB3 («Стоп») и SB4, а также конечных выключателей гребенок ступеней SQ1, SQ2, конечного выключателя поручней SQ4, конечного выключателя тяговых цепей SQ3 и т.п. Работа схемы при включении эскалатора на подъем и спуск не имеет принципиальных различий. При работе эскалатора на подъем вслед за включением блокировочного контактора KM7 включаются контакторы KM18, KM13, KM9, KM15, которые подводят питание к статору двигателя, включенному в треугольник, а также к обмоткам предохранительного и рабочего тормозов. Контроль за процессом пуска двигателя осуществляется реле KM11, выдержка времени которого выбирается несколько большей, чем время разбега при нормальных условиях. В случае затягивания пуска реле KM11 отключает блокировочный контактор KM7 или KM8, в результате чего двигатель отключается от сети. Нормальная остановка двигателя осуществляется нажатием на кнопку SB3 «Стоп». В аварийном режиме, так же как при воздействии на кнопку «Стоп», 43 разрывается блокировочная цепочка вследствие открывания одного из контактов, введенных в нее. При остановке двигателя отключаются контакторы направления вращения, треугольника или звезды, контактор KM15, а затем с выдержкой времени, обусловленной реле KM16, контактор тормоза YB2, вследствие чего его колодки меньше подвергаются износу, чем у тормоза YB1. Указанная последовательность нарушается только при срабатывании центробежного реле КМ20, которое размыкает свои контакты при 130% номинальной скорости, или аварийного выключателя SB4, когда необходимо экстренное торможение. В схеме управления двигателем эскалатора предусмотрен ряд блокировок, исключающих пуск двигателя в случае приваривания одного из контакторов в предшествующий период работы. Например, нельзя пустить двигатель, если это произойдет с любым из контакторов KM15, KM14, KM13 или KM9, так как реле KM11 не включится в начальный момент пуска и цепь катушек реверсирующих контакторов будет разорвана. В случае приваривания одного из контакторов ускорения контакторы KM13 или KM14 также не могут быть включены, так как в цепи катушек последних имеются размыкающие блокировочные контакты KV1, KV2, KV3, KV4. Благодаря этому исключается возможность пуска двигателя с выведенными пусковыми сопротивлениями. При оценке энергетических показателей электропривода эскалаторов необходимо остановиться на характере нагрузки этого механизма. В течение суток она колеблется в широких пределах, достигая максимума в утренние и вечерние часы. Снижение нагрузки днем и особенно поздно вечером доходит до 1520% номинальной. Очевидно, при этом мощность двигателя выбирается по наиболее тяжелому режиму работы. Таким образом, при слабой загрузке двигателя эскалатора его коэффициент мощности будет значительно ниже номинального. Практически среднее значение коэффициента мощности колеблется в пределах 0,25-0,50, снижаясь особенно сильно в генераторном режиме работы при спуске пассажиров. В этом режиме работы возможно такое сочетание нагрузки, при котором момент тре44 ния в механизме и потери в электроприводе будут уравновешиваться активным моментом, создающимся за счет спускающихся на станцию пассажиров. Двигатель при этом будет потреблять из сети только реактивную мощность. Если учесть, что примерно половину присоединенной мощности к шинам напряжения 380 В метрополитена составляют двигатели эскалаторов, то становится очевидным, что коэффициент мощности сети низкого напряжения вследствие недогрузки двигателей будет ниже допустимого по существующим правилам. В том случае, когда обмотка статора асинхронного двигателя выполняется таким образом, что при напряжении 380 В и полной нагрузке она должна быть соединена в треугольник, то целесообразным является переключение ее на звезду при малых нагрузках, что приводит к снижению потребляемой реактивной мощности. Не следует забывать при этом, что критический момент двигателя снизится в 3 раза, так как напряжение, подведенное к обмотке фазы статора, снизится в 3 раз. Указанное переключение применяется на ряде эскалаторов. Кроме повышения коэффициента мощности оно обеспечивает также снижение момента двигателя при включении эскалатора на спуск пассажиров, что ограничивает величину ускорений всей системы электропривода. Если обратиться к экспериментальным графикам тока статора и коэффициента мощности в зависимости от нагрузки двигателя АМЭМ-137-10 150 кВт одного из эскалаторов метрополитена (рис. 11 в), то нетрудно заметить, что ток намагничивания двигателя на холостом ходу при включении в треугольник значительно превосходит соответствующий ток звезды. Вследствие этого целесообразно, как видно из графика коэффициента мощности, оставлять обмотку статора включенной в звезду, пока нагрузка двигателя не достигнет 80-90 кВт, а ток в обмотке статора – своего номинального значения. Далее, хотя коэффициент мощности при этом снизится, необходимо переходить на включение обмотки статора двигателя в треугольник, исходя из условий допустимого нагрева обмотки статора двигателя. Для поддержания высокого коэффициента мощности при работе электропривода в схеме, приведенной на рис. 11 а, предусмотрен узел автоматического переключения обмотки двигателя с треугольника на 45 звезду и обратно в случае соответствующего изменения нагрузки. Контроль за нагрузкой двигателя выполняется двумя токовыми реле KA1 и KA2. а б Рис. 11. Схема управления электроприводом эскалатора 46 Работа реле KA1 и KA2, не учитывая коэффициента возврата, должна осуществляться таким образом, что переключение двигателя со звезды на треугольник производится, когда нагрузка увеличивается, и ток статора достигает номинального значения (точка 1, рис. 11 в). После переключения на треугольник ток статора снизится (точка 2) и далее будет вновь возрастать при увеличении нагрузки. Если нагрузка в дальнейшем снизится, то переключения производятся в обратном порядке. При включении для работы на подъем подключается к сети контактор KM18, вначале через размыкающий контакт KV4, который в дальнейшем блокируется замыкающим контактом промежуточного реле KM17. В случае если нагрузка на валу двигателя невелика или снизилась в процессе работы до величины ниже 40% номинальной, реле KA1 отключит своим замыкающим контактом реле KM17, которое в свою очередь разомкнет цепь KM18 и замкнет цепь KM19. Обмотки двигателя при этом переключаются с треугольника на звезду. Работа на спуск всегда происходит при соединении обмоток статора в звезду. Если нагрузка вновь возрастет до значения, большего 50% номинальной, то реле KA2 закроет свой контакт в цепи катушки промежуточного реле KM17, которое притягивает свой якорь, а его контакты осуществят отключение KM19 и включение KM18. При некоторой нагрузке двигателя возможно включение либо KM18, либо KM19 в зависимости от того, возрастает или снижается нагрузка на валу. Следует отметить, что реле KT1 и KM10 выбираются с небольшой выдержкой времени с той целью, чтобы предотвратить ложное срабатывание аппаратов схемы при переключении обмотки статора двигателя. В настоящее время на многих электроприводах эскалаторов кроме указанного средства повышения коэффициента мощности посредством переключения обмоток статора применяется включение статических конденсаторов. Мощность секции батареи составляет 25 квар. Число их может быть выбрано от одной до трех. Подключаются батареи к выводам статорной обмотки. 47 Рис. 11 в. Графики изменений тока статора двигателя и коэффициента мощности при включении обмотки статора двигателя в треугольник или звезду Схема 12. Многокабинные пассажирские подъемники В административных зданиях с большими потоками пассажиров находят применение многокабинные пассажирские подъемники. В отличие от лифта число кабин этого подъемника обычно равно удвоенному числу этажей плюс два. Кабины непрерывно движутся, производя транспортировку пассажиров в двух направлениях. По принципу работы и требованиям, предъявляемым к электроприводу, эти подъемники имеют большее сходство с механизмами, входящими в группу конвейеров, чем с лифтами. Кинематическая схема многокабинного пассажирского подъемника приведена на рис.12 а. По всей высоте шахты проходят две замкнутые цепи 1, которые огибают вверху и внизу звездочки 2; геометрические оси последних смещены одна относительно другой на ширину кабины. 48 Рис. 12 а. Кинематическая схема многокабинного подъемника Нижние звездочки (иногда верхние) приводятся во вращение двигателем М. Цепи с шарнирно прикрепленными к ним кабинами перемещаются в заданном направлении вращающимися звездочками. Вследствие одинаковой скорости движения цепей на вертикальном участке шахты кабины движутся прямолинейно и равномерно. При переходе кабиной верхнего и нижнего участков пол кабины остается в горизонтальном положении. Для поддержания постоянства натяжения тяговых цепей валы верхних звездочек связаны с натяжной станцией, которая позволяет менять расстояние между верхними и нижними приводными звездочками. Вход и выход пассажиров в многокабинных подъемниках осуществляются на ходу. Многокабинный подъемник обеспечивает одновременно двустороннее движение пассажиров с малым временем ожидания кабины порядка 12-15 с. Установка подъемников целесообразна в 10-12 этажных 49 зданиях с большими потоками пассажиров. Дальнейшее увеличение высоты подъема ведет к чрезмерному утяжелению и удорожанию механической части подъемника. В качестве приводных двигателей многокабинных подъемников используются асинхронные двигатели с короткозамкнутым и фазным ротором соответственно для малых и больших высот подъема. Схема электропривода многокабинного подъемника, приведенная на рис. 12 б весьма проста и не требует особых пояснений. Рис. 12 б. Принципиальная схема электропривода многокабинного подъемника Наибольший интерес представляют в данной схеме блокировочные устройства, предотвращающие несчастные случаи при движении. Отметим прежде всего, что направление передвижения кабин в установке фиксировано: на него настраиваются все блокировочные цепи и защитное механическое оборудование. Контроль за правильностью направления движения осуществляется конечными выключателями обратного хода SQ11, SQ12. Пуск двигателя может 50 быть произведен обслуживающим персоналом с одного из пунктов управления, чаще всего из машинного зала, посредством нажатия кнопок SB1, SB2, SB3. Остановка может быть произведена с пунктов управления и с любого этажа нажатием кнопок SB4 – SB6. На каждом этаже по пути следования кабин устанавливаются откидные клапаны, а в самих кабинах – откидные фартуки, которые поворачиваются на угол 75-90° при задевании за них выступающими за габариты кабины частями тела пассажира или какими-либо предметами. При этом открываются соответственно контакты конечных выключателей этажных клапанов SQ5, SQ6, SQ8, SQ9 и фартуков кабины SQ7, SQ10. Кроме того, в нижней и верхней зонах шахты против лицевой стороны имеются гладкие щиты, закрывающие выход из кабины при проходе ею первого и последнего этажей. В случае если пассажир надавит на щит, открываются контакты конечных выключателей SQ3, SQ4. В цепь управления вводятся также конечные выключатели SQ1, SQ2, фиксирующие правильное движение кабин по направляющим. Приведенные блокировочные цепи обеспечивают безопасное пользование подъемниками при полностью открытой лицевой стороне кабин. Схема 13. Управление лифтом с двухскоростным асинхронным двигателем При скоростях движения кабин 0,7-1,0 м/с и выше применяются системы электропривода с двухскоростными короткозамкнутыми асинхронными двигателями, которые имеют две раздельные обмотки на статоре с соотношением числа пар полюсов 3:1, 4:1, 6:1 при высшей синхронной частоте вращения 1000 об/мин. На рис. 13 приведена схема управления пассажирским подъемником с двухскоростным асинхронным двигателем. В системе электропривода не предусмотрено ограничение ускорения при пуске: двигатель включается непосредственно на полное напряжение сети. Точная остановка двигателя достигается путем перехода на пониженную скорость. Ограничение момента в генераторном режиме при переходе с высокой скорости на низкую производится вве51 дением в одну из фаз статорной цепи дополнительного сопротивления. Ограничивающее сопротивление выключается реле КМ1 в функции времени КМ4.4 при достижении кабиной низшей скорости. Управление подъемником может производиться как из кабины, так и с этажных площадок посредством вызывных кнопок. К характерным аппаратам управления относятся в данной схеме этажные переключатели SA7-SA10, которые устанавливаются в зоне точной остановки кабины, и этажные реле KV1-KV4. На расстоянии 600-900 мм, равном пути замедления, выше и ниже уровня пола этажа устанавливаются переключатели скорости двигателя SA1-SA6. Для открывания замков шахтных дверей служит магнитная отводка KM5. Катушки электромагнита тормоза включаются с помощью контактора KM2. В том случае, когда кабина находится на первом этаже и в нее входит пассажир, желающий ехать на (n – 1)-й этаж, он должен нажать кнопку SB1-SB4. При нажатии на кнопку образуется следующая электрическая цепь: контакты кнопки SB9, контакты конечных выключателей дверей шахты и контакты конечных выключателей SQ4-SQ10, контакты кнопки SB10, размыкающие блокконтакты контакторов KM1, KM7 и KM8, контакты кнопки SB1-SB4, катушка этажного реле KV1-KV4, контакт этажного переключателя SA7-SA10 размыкающий контакт KM8.5, катушка KM7. Вследствие образования цепи питания срабатывают реле KV1-KV4 и контактор KM7. Цепь кнопки шунтируется контактами реле KV1-KV4. После включения контактора KM7 пусковые кнопки вызова кабины оказываются отключенными, что делает невозможным управление кабиной во время движения. Исключение составляет действие кнопками SB9, SB10. Срабатывание KM7 приведет также к срабатыванию контактора KM2, благодаря чему получит питание электромагнит тормоза YB и двигатель будет расторможен. 52 Рис. 13. Схема управления электроприводом лифта с двухскоростным асинхронным двигателем 53 После срабатывания этажного реле подается напряжение на катушку контактора быстрого движения KM6 по следующей цепи: катушка KM6; размыкающий контакт KM4; контакты выключателя большой скорости SB11, SB12, отключаемого для режимов ревизии и наладки; контакты переключателя скорости на (n – 1)-м этаже при движении вверх SA4-SA6 и замыкающие контакты этажного реле KV1-KV4. При включении контактора KM6 оказывается подключенной к сети обмотка статора двигателя с меньшим числом полюсов (быстроходная), и двигатель разгоняется до максимальной скорости. Вслед за включением контактора быстрого движения KM6 включаются контактор отводки KM3 и катушка электромагнита отводки KM5. Цепь катушки контактора медленного движения KM4 подготовлена к включению. При подходе к (n – 1)-му этажу контакт SA4-SA6 из положения а переводится в положение б, в результате чего отключается контактор KM6 и включается контактор KM4. К сети подключается вторая обмотка статора с большим числом полюсов (тихоходная). Двигатель начинает тормозиться и работает в генераторном режиме с введенным в одну из фаз статора дополнительным сопротивлением. Отметим, что для ограничения момента при переходе на низкую скорость в некоторых системах производится включение одной ступени ограничивающего сопротивления в три фазы статорной цепи. После включения контактора KM4 с выдержкой времени замыкается контакт пристроенного к нему маятникового реле времени КМ4.4; при этом включается контактор KM1, выводящий добавочное сопротивление из цепи статора. Как только пол кабины встанет на одном уровне с полом этажного перекрытия, переключатель SA7-SA10 становится в нейтральное положение, в связи, с чем происходит отключение контакторов KM7, KM2, КM3 и KM4. Двигатель отключается, и электромеханический тормоз, потеряв питание, зажимает колодки. Происходит механическое торможение электропривода. После остановки кабины сердечник замковой отводки вследствие выключения контактора KM3 и электромагнита отводки KM5 своим выступом упирается в замок шахтной две54 ри соответствующего этажа, что дает возможность пассажирам открыть ее. Работа схемы управления при спуске кабины аналогична работе при подъеме. Схема 14. Автоматическое управление синхронным двигателем компрессора В задачу схемы автоматического управления синхронным двигателем воздушного компрессора входят включение и отключение двигателя в зависимости от суточного графика потребления воздуха и давления в воздушной магистрали. Кроме автоматического управления в схеме предусмотрено ручное управление включением и отключением двигателя. Осуществляется тот или иной режим при установке универсальных переключателей SA1, SA2 и SA3 (рис. 14) в определенное положение. На рис. 14 приведена схема управления синхронным двигателем (СД), обмотка статора которого получает питание от сети переменного тока напряжением 6 кВ. Обмотка возбуждения двигателя наглухо подключена к якорю возбудителя M, который приводится во вращение асинхронным двигателем (AД). Масляный выключатель КМЗ в цепи статора синхронного двигателя включается электромагнитом с катушкой KM3 и отключается электромагнитом с катушкой KM2 (цепь 13). Кроме того здесь используются сигнальные реле РС1÷РС7 информационного назначения. Повышение перегрузочной способности синхронного двигателя при снижении напряжения сети достигается путем увеличения тока возбуждения возбудителя. Автоматическое изменение тока возбуждения производится с помощью реле напряжения KV1, катушка которого подключается к питающей сети асинхронного двигателя. При нормальном напряжении сети Н.3 контакт KV1.1 в цепи (12) катушки KM1 открыт. Если напряжение снизится, то Н.3 контакт KV1.1 закроется, катушка KM1 получит питание, и зашунтирует своим контактом реостат R1 в цепи обмотки ОВМ (М), тем самым увеличивается напряжение, подаваемое на ОВМ, а здесь, на ротор (возбуждение) синхронного двигателя СД. 55 а б Рис. 14. Схема автоматического управления синхронным двигателем компрессора: а) основные цепи; б) схема включения аппаратов блокировки и защиты Включатель КМЗ может быть включен, если открыты пусковая и рабочая воздушные задвижки компрессора, что фиксируется соответственно закрытием (цепь №1) контактов реле KM19 и конечного выключателя SQ1. Кроме того, в магистралях смазки должно быть обеспечено определенное давление масла, контролируемое реле KM27, KM28 (цепь №10) и промежуточным реле KM18. При нормальном давлении контакт KM18.2 в цепи катушки промежуточного реле защиты реле РСЗ и катушек KM16 (цепь 8) открыт. В цепь катушки КМ16 56 также вводятся контакты различных датчиков, контролирующих нормальную работу. Это, как двигателя (KA – токовое реле, KM17 – контроль пуска совместно с реле времени KT3), так и собственно компрессора (KM24 – тепловая защита в цепи ДСУ, KM22, KM23 – струйные реле контроля масла в цепи реле РС3, KM25, KM26 – реле уровня масла в цепи реле РС6; KM29 и KT2 – струйное реле и реле времени (цепь 11), сигнализирующее об исчезновении охлаждающей воды). В цепи контактов указанных реле включены катушки сигнальных реле (РС1÷РС8). Реле KM16 закрывает свой контакт в цепи отключающей катушки KM2 в том случае, когда создается цепь питания катушки KM16 через соответствующие контакты защитных реле. Включение двигателя компрессора может быть произведено автоматически с диспетчерского пункта от часового механизма, контакт которого KM21.1 (цепь 5) включен в схему. Один часовой механизм может последовательно вводить в работу компрессоры в соответствии с графиком суточного потребления воздуха предприятием. Время замыкания контакта KM21.1 не превышает 20-30 с. Поэтому он включает промежуточное реле KM13, которое далее продолжает воздействовать на схему управления и при открытом контакте KM21.1. Замыкание сигнальных цепей электрических часов осуществляется коническими штифтами, которые могут быть установлены на любом часе суток с интервалом в 5 мин. Наиболее частой уставкой штифта является такая, при которой импульс на включение дается в начале смены, а на отключение – в конце смены. В режиме автоматического управления двигателем компрессора основными действующими датчиками являются часовой механизм с контактом KM21.1 и промежуточное реле давления воздуха KM20. Последнее при снижении давления в воздушной магистрали замыкает свой контакт в цепи 6 и открывает контакт в цепи 2 (рис.14). Если все блокировочные и защитные цепи находятся в таком состоянии, что возможно включение катушки KM3, то при замыкании контакта KM21.1 промежуточное реле KM13 заблокирует собственную катушку в цепи 5 и закроет контакты в цепях 6 и 7. 57 Таким образом, цепь включения катушки KM14 после срабатывания KM13 готова к замыканию с последующей подачей импульса на реле автоматического включения KT1, которое и включит своим замыкающим контактом катушку KM3 в цепи 1. Включение цепей произойдет только после замыкания контакта KM20. После включения KM14 потеряет питание катушка KM13. Последующее включение контакта KM21.1 приведет теперь уже к составлению цепи 7 отключения двигателя компрессора. Однако отключение произойдет только после того, как давление в магистрали будет выше допустимого и контакт KM20 в цепи катушки KM11 будет закрыт. Не останавливаясь подробно на работе второстепенных с точки зрения автоматизации аппаратов, роль которых может быть уяснена при изучении схемы, отметим, что если после первого срабатывания KM21.1 в начале смены двигатель не включился, то повторное включение KM21.1 не снимает возможности включения двигателя. Схема остается подготовленной к пуску синхронного двигателя, и случайное снижение давления между сменами может дать ложное срабатывание схемы. Для предотвращения последнего режима перед новой сменой, если не ожидается роста нагрузки, желательно отключить КМ13 посредством переключателя SA1. Литература 1. М.М. Соколов. Автоматизированный электропривод общепромышленных механизмов. М. Энергия, 1972 г.- с.544. 2. Есаков В.П. Электрооборудование и электропривод промышленных установок. Киев. Виша, 1981 г – с. 247 58 Мая Ивановна Стальная Сергей Юрьевич Ерёмочкин ЭЛЕКТРООБОРУДОВАНИЕ ПРОМЫШЛЕННЫХ МЕХАНИЗМОВ Методические указания к лабораторным работам студентов специальности 140604 Подписано в печать 13.01.09. Формат 60х84 1/16 Печать-ксерокопия. Усл.п.л. 3,6. Уч.-изд.л. 3,6 Тираж 30 экз. Издательство Алтайского государственного технического Университета им. И.И.Ползунова, 656099, г. Барнаул пр-т. Ленина, 46 Лицензия на издательскую деятельность ЛР № 020822 От 21.09.98 г. Отпечатано на кафедре АЭП и ЭТ. 59