Модификация алгоритма управления космическим аппаратом с
реклама

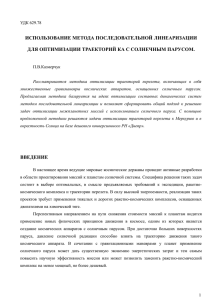
ISSN 2072-9502. Âåñòíèê ÀÃÒÓ. Ñåð.: Óïðàâëåíèå, âû÷èñëèòåëüíàÿ òåõíèêà è èíôîðìàòèêà. 2010. № 1 УДК 531.1+521.1 И. В. Карпасюк ÌÎÄÈÔÈÊÀÖÈß ÀËÃÎÐÈÒÌÀ ÓÏÐÀÂËÅÍÈß ÊÎÑÌÈ×ÅÑÊÈÌ ÀÏÏÀÐÀÒÎÌ Ñ ÑÎËÍÅ×ÍÛÌ ÏÀÐÓÑÎÌ ÍÀ ÍÈÇÊÎØÈÐÎÒÍÎÉ ÎÊÎËÎÊÐÓÃÎÂÎÉ ÎÐÁÈÒÅ Введение В настоящее время околоземное космическое пространство все более интенсивно и широко используется как в целях проведения многочисленных научных исследований, так и для обеспечения самых разнообразных нужд современной цивилизации. В связи с быстрым увеличением числа всевозможных тел искусственного происхождения, движущихся по геоцентрическим орбитам, космическое пространство в окрестности планеты Земля загрязняется отходами (называемыми «космический мусор»), появляющимися в процессе функционирования космических аппаратов. Постоянно увеличивающаяся скорость прироста объема космического мусора (сосредоточенного большей частью в экваториальной плоскости Земли ввиду ее активной эксплуатации) несет в себе реальную угрозу космическим аппаратам, как уже функционирующим в околоземном пространстве, так и впервые выводимым на геоцентрическую орбиту. Космический мусор уже становился причиной повреждения спутников и орбитальных станций [1]. Неоднократно корректировалась орбита Международной космической станции, чтобы избежать ее столкновения с отслеженными крупными элементами космического мусора. Таким образом, задача уменьшения негативного влияния космического мусора на штатное функционирование космических аппаратов является весьма актуальной. Решение задачи Одним из возможных способов решения данной задачи является использование цилиндрических (называемых также широтными) орбит, параллельных экваториальной плоскости Земли и находящихся на определенном расстоянии от нее, над некоторой географической широтой. Для удержания космического аппарата на низкоширотной цилиндрической орбите в течение длительного времени возможно использование солнечного паруса. Солнечный парус представляет собой разновидность двигателей малой тяги. Он может применяться для осуществления долговременного управляющего малого воздействия на элементы орбиты, которого, тем не менее, вполне достаточно, чтобы поддерживать движение космического аппарата на заданной высоте над плоскостью экватора при определенном алгоритме управления ориентацией паруса. В [2] такой алгоритм управления строился для периода быстрого колебания (суток), в связи с чем направление вектора солнечных лучей l предполагалось постоянным. Однако, ввиду необходимости долговременного характера действия солнечного паруса как управляющего устройства, являющегося источником возмущающей силы, имеющей ненулевую проекцию на нормаль к экваториальной плоскости, изменение направления вектора l необходимо учитывать [3]. Рассмотрим движение космического аппарата с солнечным парусом по околокруговой низкоширотной орбите на высоте h над плоскостью экватора (предполагая тем самым, что значение h будет намного меньше величины радиуса орбиты). Выберем декартову систему координат OXYZ таким образом, чтобы ее центр O совпадал с центром Земли, ось OX была направлена в точку весеннего равноденствия, ось OZ – по нормали к экваториальной плоскости Земли, а ось OY составляла с предыдущими осями правую тройку. Возмущающее ускорение, сообщаемое космическому аппарату солнечным парусом, можно представить в виде [4]: w = σ(u l)2 u, (1) где u – вектор нормали к теневой стороне плоского паруса, непосредственно реализующий управляющее воздействие на движение космического аппарата; σ – коэффициент, зависящий от физических характеристик паруса и являющийся малым параметром. Предполагается, что ║u║2=║l║2=1, откуда u3 = 1 − u12 − u22 . 132 (2) Êîìïüþòåðíîå îáåñïå÷åíèå è âû÷èñëèòåëüíàÿ òåõíèêà Таким образом, модуль вектора w определяется значением параметра σ. В течение периода быстрых колебаний будем считать направление вектора l неизменным, но в течение следующего периода это направление будет уже другим, выбранным с учетом движения Солнца по эклиптике. Из формулы (1) следует, что меридиональная компонента возмущающего ускорения, соответствующая оси OZ введенной системы координат и обеспечивающая движение спутника по широтной орбите, имеет вид w3 = σ u3 (u l)2 = σ u3 (u1l1 + u2l2 + u3l3)2, (3) где l = (l1, l2, l3) = const в течение периода быстрых колебаний. Введем параметр k= w3 σ (4) и выразим u1, u2 через полярные координаты ρ, ν по формулам: u1 = ρ cos ν, u2 = ρ sin ν, ρ ∈ (0, 1], ν ∈ [0, 2π). (5) Подставляя (4), (5) и (2) в (3), находим 2 k = 1 − ρ2 ρ l1 cos ν + ρ l2 sin ν + l3 1 − ρ2 , откуда получаем k ρ ⋅ 4 1 − ρ2 = l1 cos ν + l2 sin ν + l3 1 − ρ2 ρ2 и l1 cos ν + l2 sin ν = − = ( l3 1 − ρ 2 k + = 4 ρ ρ ⋅ 1 − ρ2 ) − l3 1 − ρ 2 + k ⋅ 4 1 − ρ2 ρ ⋅ 1 − ρ2 . (6) Введем функции: g(ν) = l1 cos ν + l2 sin ν, q(ρ) = ( ) − l3 1 − ρ2 + k ⋅ 4 1 − ρ2 ρ ⋅ 1 − ρ2 . График функции q (ρ) представлен на рисунке. Он построен для предельных значений параметров k, l3. 2 Значение параметра k = соответствует максимально возможному значению мери3 3 диональной составляющей вектора управляющего ускорения от солнечного паруса, обеспечивающему наибольшую высоту цилиндрической орбиты [2]. Реальные значения параметра k, приемлемые с точки зрения эффективности гашения вековых возмущений вектора Лапласа, будут меньше. Значение параметра l3 ≈ 0,3987 соответствует максимально возможному углу наклона плоскости широтной орбиты по отношению к направлению на Солнце (в точках солнцестояний), что составляет примерно 23,5°. 133 ISSN 2072-9502. Âåñòíèê ÀÃÒÓ. Ñåð.: Óïðàâëåíèå, âû÷èñëèòåëüíàÿ òåõíèêà è èíôîðìàòèêà. 2010. № 1 q(ρ) –0,5 –0,999 0,5 0,999 ρ График функции q (ρ) Очевидно, что в заданных границах изменения значений параметров g (ν ) ≤ 1 , q (ρ) ∈ (0, ∞) . Найдем максимум функции g(ν) для известных l1, l2, обозначим его g max . Используя численные методы, можно найти отрезки [ρ1 , ρ 2 ] , для которых выполняется условие: q (ρ) ≤ g max . Значения ν, соответствующие каждому значению ρ из найденных промежутков, определяются из уравнения (6). Дальнейшие же действия полностью соответствуют алгоритму, описанному в [2]. Этот алгоритм позволяет вычислять компоненты вектора u(t) управления ориентацией солнечного паруса для реализации широтного движения космического аппарата, минимизирующего вековые возмущения вектора Лапласа. Выводы Таким образом, для каждого периода движения космического аппарата с солнечным парусом по цилиндрической орбите определяется свой закон управления парусом с учетом движения Солнца по эклиптике. СПИСОК ЛИТЕРАТУРЫ 1. 2. 3. 4. Гаврилов В. Космический мусор: Обломки недавнего прошлого. [Электронный ресурс]. – Заглавие с экрана. Режим доступа: http://www.popmech.ru/article/479-kosmicheskiy-musor. Карпасюк И. В., Шмыров А. С. Управление космическим аппаратом с солнечным парусом на низкоширотной околокруговой орбите // Вестн. С.-Петерб. ун-та. Сер. 1. – 1999. – Вып. 4, № 22. – С. 89–93. Карпасюк И. В. Моделирование возмущенного движения в гравитационном поле // Вестн. С.-Петерб. ун-та. Сер. 1. – 1998. – Вып. 4, № 22. – С. 100–102. Поляхова Е. Н. Космический полет с солнечным парусом: проблемы и перспективы. – М.: Наука, 1986. – 304 с. Статья поступила в редакцию 15.12.2009 134 Êîìïüþòåðíîå îáåñïå÷åíèå è âû÷èñëèòåëüíàÿ òåõíèêà MODIFICATION OF CONTROL ALGORITHM OF A SPACESHIP WITH SOLAR SAIL ON LOW-LATITUDE NEAR-CIRCULAR ORBIT I. V. Karpasyuk The problem of algorithm development of the flat solar sail orientation control is considered in the paper. It is set on the spaceship in order to see fulfilled its long-term movements on low-latitude near-circular orbit. The change of sun rays direction, caused by the Sun ecliptic movements, is taken into consideration in the algorithm. Algorithm application can decrease the probability of spaceship with solar sail damage by space debris. Key words: space debris, spaceship with solar sail, control algorithm of solar sail, latitude orbit, cylindrical orbit, the Sun ecliptic movements taken into consideration. 135