К ОСНОВНЫЕ ПрОБЛЕМЫ УПраВЛЕНИЯ ТрОСОВОЙ СИСТЕМОЙ В КОСМОСЕ
реклама

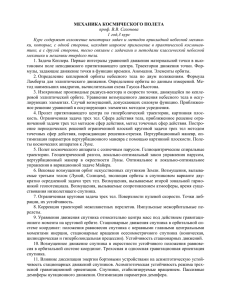
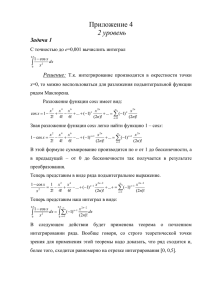
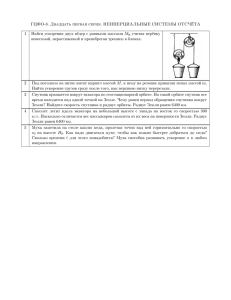
ОСНОВНЫЕ ПРОБЛЕМЫ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ В КОСМОСЕ А.Л. ОРЛОВ, асп. каф. физики МГУЛ, В.И. Лобачев, проф., зам. ген. директора ЦУП ФГУП ЦНИИМАШ, д-р техн. наук К осмическая тросовая система – это совершающий орбитальный полет комплекс искусственных космических объектов (спутников, кораблей, грузов), соединенных длинными тонкими гибкими элементами (тросами, кабелями, шлангами). Тросовые системы могут включать много космических объектов, соединенных тросами в форме замкнутых колец, древовидных образований, объемных многогранников. В данной статье тросовая система рассмотрена в виде связки космического аппарата и спутника, соединенных тросом длиной несколько десятков километров. Одной из самых главных задач во время операции управления малым спутником является процесс его спуска с борта космического корабля. Условимся на простом, но в практическом смысле важном моменте, что система движется по круговой орбите вокруг Земли. Основная проблема в процес- mertalo@mail.ru се спуска при воздействии гравитационной силы заключается в том, что два спутника не движутся по схожим круговым орбитам с постоянной длиной выпускаемого троса. Напротив, спуск приводит к нестабильным движениям с учетом позиции на круговой орбите. В статье предлагается оптимальный способ достижения контролируемого спуска привязанного спутника со стабильной позиции движения космического корабля на стабильную позицию движения спутника вдали от корабля. Основные проблемы контроля спуска малого спутника Идея системы связанных спутников (рис. 1) заключается в том, что два или более спутников на орбите соединены тонкими и длинными тросами (длина до 100 км вполне обычна) и на данный момент хорошо описана в астродинамике. За последнее десятилетие Рис. 1. Тросовая система, состоящая из космического корабля и спутника, вращающихся по устойчивой орбите ЛЕСНОЙ ВЕСТНИК 6/2012 20 века было совершено несколько успешных (проект SDES) и не полностью успешных (проект TSS1) полетов на геостационарную орбиту. Существует широкий спектр полезных с практической точки зрения применений TSS (tethered satellite system), начиная с выработки энергии, используя магнитное поле Земли, до увеличения орбиты или запуска с нее спутников путем обрезания привязи в момент равновесия или максимального удаления от Земли. Устойчивое радиальное положение достигается, если система из двух спутников, связанных тросом постоянной длины, движется по круговой орбите, и при этом длина привязи не слишком велика (если этого требует радиус орбиты). Позиция устойчивого равновесия является самым главным элементом такой системы. В таком положении трос находится в натянутом состоянии под воздействием нелинейного гравитационного поля. В данной статье рассмотрен важный и весьма сложный процесс для системы связанных спутников, а точнее спуск малого спутника с космического корабля, движущегося по круговой орбите Кеплера. В нашу задачу входит спуск малого спутника с начальной позиции устойчивого радиального равновесия, где он близок к космическому кораблю, в позицию устойчивого радиального равновесия, где он находится в отдалении от корабля. Из-за воздействия нелинейной гравитационной силы трос находится в состоянии натяжения. Этот так называемый эффект гравитационного градиента может быть использован при спуске. То есть, после снятия тормоза, сохраняющего длину троса постоянной, расстояние между спутниками начнет увеличиваться. Этот процесс, не регулируемый и не контролируемый, называется свободным спуском. Процесс свободного спуска имеет два неприятных эффекта. Во-первых, спутник и трос не движутся по радиальной траектории. Следовательно, после завершения процесса спуска система будет испытывать большие колебания амплитуды, которые будут затухать очень медленно (в основном, только за счет вязкоупругости троса, так как данная 10 система обладает слабым рассеивающим эффектом). Во-вторых, самая большая скорость размотки достигается в самом конце размотки, приводя к сильному толчку. Если не принять особых мер, произойдет большая нагрузка на трос, которая может достичь предела прочности материала троса (кроме того, возможны сильные изменения в траектории движения груза). Таким образом, даже если свободный спуск является быстрым и полезным с практической стороны способом решения определенных задач, во многих других случаях процесс спуска должен строго контролироваться. В литературе [3] можно найти несколько различных стратегий спуска: 1) свободный спуск с контролем позиции после завершения размотки; 2) контролируемый спуск, использующий закон Киссела [2]; 3) оптимальный контроль процесса спуска; 4) ориентация и стабилизация с помощью стратегии управления хаотичных движений. В работе мною рассматривалась стратегия 3. Важно отметить особенность приложения управляющего воздействия к тросовой системе спутника. Конечно, управление по подавлению нежелательных колебаний может быть реализовано за счет двигателей, действующих на малом спутнике. Однако проще и эффективней управлять движением малого спутника за счет силы натяжения кабеля, что в литературе называется контролем натяжения. Используя эту стратегию, можно с помощью различной силы натяжения быстро спустить малый спутник из положения радиального относительного равновесия рядом с основным спутником на конечную орбиту, которая при постоянной длине троса будет также являться стабильной позицией радиального относительного равновесия. Отметим, что аналогичная стратегия может быть использована и для контроля возврата малого спутника [4]. Использование принципа максимума Понтрягина [5] позволяет ввести ограничения, являющиеся важными с практической точки зрения. В данной статье введено три различных ограничения: (А) Движение раз- ЛЕСНОЙ ВЕСТНИК 6/2012 вертываемого троса будет монотонно возрастающим. С практической точки зрения, это будет иметь значение для намотанного троса на катушке, когда его смотка обратно невозможна (в основном тросы хранятся и разматываются с катушки или барабана, причем, если смотка необходима, используются барабаны). (В) Отклонение при развертывании малого спутника по вертикальной составляющей считаются малыми. (С) Силы натяжения во время управляемого спуска всегда должны быть положительными и ограничены по максимальному значению. Ограничения (А) и (B) могут быть проигнорированы. Это приведет к решению, при котором возможно развертывание в кратчайшие сроки. Однако ограничение (C) всегда должно учитываться. Определение системы уравнений движения спутника (1) Для определения кинетической и потенциальной энергий (T и V соответственно), используем выражения (рис. 2) y = rMcosωt + lcos(ωt + ϕ), z = rMsinωt + lsin(ωt + ϕ). Далее из (2) получаем ЛЕСНОЙ ВЕСТНИК 6/2012 (2) z = rMωcosωt + l(ω + ϕ )cos(ωt + ϕ) + + l sin(ωt + ϕ). (3) Таким образом, кинетическая энергия малого спутника m равна T= 1 m m( y + z ) = (rM ω + l (ω + ϕ ) + l + +2rM ωlsin ϕ + 2rM ωl(ω + ϕ ) cos ϕ) . (4) Обозначив r расстояние от центра притяжения до спутника S r2 = (rM + lcosϕ)2 + l2sinϕ2 = = rM2(1 + 2(l/rM)cosϕ + (l/rM)2), Будем считать два спутника точечными массами, соединенными прямым невесомым тросом. Как показано на рис. 1, космический корабль (M) движется по круговой орбите rM вокруг Земли. Малый спутник (m) связан с кораблем невесомым тросом, вдоль которого действует сила натяжения N. В дальнейшем воздействия движений малого спутника m на корабль не учитываются (это приемлемое допущение ввиду разницы масс на два порядка). Динамика движения спутника m описывается двумя степенями свободы: угловым наклоном ϕ(t) относительно радиуса rM и расстоянием l(t) между спутниками. Определим уравнения движения, используя уравнения Лагранжа в форме d ∂T ∂T ∂V − + = Qi . dt ∂qi ∂q i ∂q i y = –rMωsinωt – – l(ω + ϕ )sin(ωt + ϕ) + l cos(ωt + ϕ), (5) получим выражение для потенциальной энергии V V =− km −km = , r rM + 2lrM cos ϕ + l (6) где k есть гравитационная постоянная Земли. Далее получаем km(rM cos ϕ + l ) ∂V = = ∂l (rM + 2lrM cos ϕ + l )3 = mrMω2(cosϕ + (l/rM)× ×[1 – 3cosϕ2] + O(l/rM)2), (7) принимая во внимание (l/rM) << 1 и MrMω2 = Mk/rM2. Аналогично получаем −kmrM l sin ϕ ∂V = = ∂ϕ (rM + 2lrM cos ϕ + l )3 = –mrMlω2sinϕ(1 – 3(l/rM)cosϕ + O(l/rM)2). (8) Подставив в (1), получим + 2l(ϕ + ω) + 3l ω sin ϕ cos ϕ = 0 . lϕ l − l (3ω cos ϕ + 2ωϕ + ϕ ) = − N / m . (9) 11 Рис. 2. Две точечные массы m и M соединены тросом Рис. 3. Траектория малого спутника при оптимальной стратегии спуска 12 Рис. 4. Реальная траектория движения спутника ЛЕСНОЙ ВЕСТНИК 6/2012 Далее введем безразмерные величины длины троса ξ = l / lT и времени τ = ωt. Здесь lT = l(T) есть конечная длина троса и ω есть угловая скорость. В итоге получим ξ + 2 (ϕ + 1) + 3sin ϕ cos ϕ = 0 , ϕ ξ N ξ − ξ(3cos ϕ + 2ϕ + ϕ ) = − = −u , (10) mωlT где u есть безразмерная сила натяжения троса, впоследствии используемая как контрольная величина. Величина u пропорциональна силе натяжения N и изменяется в интервале [umin, umax], где umin ≥ 0 ввиду того, что трос не испытывает сил сжатия. Сила натяжения во время управляемого спуска всегда должна быть положительна и ограничена по максимальному значению umax = 1,05uS, где us = 3 есть статичная сила натяжения. Применение оптимальной стратегии размотки тросовой системы Стратегия, разработанная в [1, 5], отлично подходит для упрощенной модели системы связанных спутников. Считая, что отклонения движения малого груза по вертикальной составляющей малы и соотношение длин троса ξ0/ξT = 1/20, получаем три переходных интервала, как показано на рис. 3. Вычисленная траектория полета малого спутника совпадает с реальной траекторией движения, показанной на рис. 4, за исключением расхождений в самом конце спуска. Небольшая корректировка переходных интервалов может устранить эти расхождения. Здесь важным моментом выступает то, что мы контролируем систему заданием силы натяжения выпускаемого троса. Поэтому конечный процесс размотки сильно зависит от накопленных мелких погрешностей, которые могут вызвать сильные отклонения от запланированной траектории. Возможным путем решения этой проблемы может быть либо переход к постоянной длине троса или установка дополнительного датчика контроля на спускаемом грузе. Для большей наглядности и понятности процесса обозначим несколько фактов. Во-первых, мы предполагаем свободное контролируемое развертывание троса. Начальное положение малого спутника на 1 км ниже кос- ЛЕСНОЙ ВЕСТНИК 6/2012 мического корабля на устойчивой геоцентрической орбите. Процесс развертывания прекращается после размотки 20 км троса. Для малого спутника массой 1000 кг и массой троса 1кг/км получим время размотки T = 2650 сек. Однако при данных условиях, груз сильно отклонится от необходимой траектории, а его дальнейшее движение становится нестабильным и труднопрогнозируемым. Оптимальный процесс спуска показан на рис. 4 и занимает T = 4884 сек. В этом случае система достигнет положения равновесия и может в дальнейшем по необходимости корректироваться. Выводы Целью данной статьи было описание специфики задачи об управлении развертыванием тросовой системы и ее основных проблем. Была предложена стратегия развертывания тросовой системы, основанная на принципе максимума Понтрягина, которая направляет привязанный малый спутник с геостационарной орбиты космического корабля на более низкую орбиту путем контроля натяжения троса. Моделирование данной стратегии дало результаты, прекрасно согласующиеся с реальными данными полета. Работа проводилась при финансовой поддержке Министерства образования и науки Российской Федерации в рамках государственного контракта от 13 сентября 2011 г. №16.523.12.3006. Библиографический список 1. Алпатов, А.П. Динамика космических систем с тросовыми и шарнирными соединениями / А.П. Алпатов, В.В. Белецкий, В.И. Драновский и др. – Ижевск: РХД, 2007. – 559 с. 2. Bainum, P. and Kumar, V.K., ‘Optimal control of the shuttle-tethered-subsatellite system’, Acta Astronautica, 7, 1980, 1333–1348. 3. B. Barkow, A. Steindl, H. Troger, G. Wiedermann: «Various Methods of Controlling the Deployment of a Tethered Satellite»; Journal of Vibration and Control, 9 (2003), S. 187–208 4. A. Steindl, H. Troger: «Optimal Control of Deployment of a Tethered Subsatellite»; Nonlinear Dynamics, 31 (2003), S. 257–274. 5. Leitmann, G., ‘An Introduction to Optimal Control’, McGraw-Hill, N.Y., 1966. 13