pdf (121 кБ) - Кубанский государственный аграрный университет
реклама
 - Кубанский государственный аграрный университет")
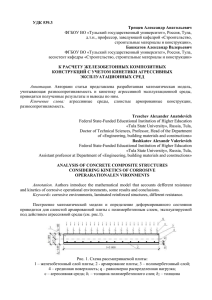
УДК 622.011.43 КОНЕЧНО-ЭЛЕМЕНТНАЯ МОДЕЛЬ РАСЧЕТА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ УПРУГОГО МАССИВА, СОДЕРЖАЩЕГО ОСЕСИММЕТРИЧНУЮ ПОЛОСТЬ Аршинов Г. А. – к. ф.-м. н. Кубанский государственный аграрный университет Рассматривается конечно-элементная модель расчета напряженно- деформированного состояния упругого полупространства, содержащего осесимметричную полость. Модель строится из следующих соображений. Допустим, что в упругом однородном изотропном полупространстве образована осесимметричная (с вертикальной осью симметрии) полость с центром на глубине Н и максимальным характерным размером а. Предполагая, что а/Н<<1, и учитывая малость влияния полости на напряженное состояние окружающего ее массива вне шара (центры полости и шара совпадают) радиуса 4а, заменим весомое полупространство, содержащее емкость, невесомым круглым цилиндром с полостью, по верхнему торцу и боковой поверхности которого равномерно распределены сжимающие усилия p = γH ( γ – объемный вес массива) и p1 = λp , а нижний торец опирается на жесткое основание. Выделенную область массива с полостью аппроксимируем совокупностью кольцевых конечных элементов треугольного поперечного сечения и в силу осесимметричности рассмотрим лишь половину меридионального сечения полученной аппроксимации (рис. 1в). При наличии у полости эквато- 2 риальной плоскости симметрии достаточно рассмотреть четверть указанного сечения (рис. 1а). Предположим, что конечно-элементная идеализация содержит Е треугольников и G узлов, будем нумеровать узлы (вершины) треугольников 1, 2, 3 против часовой стрелки. Рисунок 1 – Конечно-элементная аппроксимация выделенной области с полостью Для удобства дальнейшего изложения воспользуемся матричной символикой [1]. Функцию перемещений u( ρ, z ) аппроксимируем следующим образом: (1) E u( ρ , z ) ≈ υ( ρ , z ) = ∑ q(Ne ) ( a N + bN ρ + c N z ) , e =1 где u, υ – вектора-столбцы, компоненты которых суть проекции вектора смещений и его аппроксимации на оси координат Oρ , u N q(Ne ) = (N = 1,2,3) – вектор узловых смещений е-го треугольника. v N Oz; 3 Коэффициенты a N ,bN , c N определяются через координаты узлов элемента: 1 ρ1 a1 = S( e ) ( ρ 2 z3 − ρ3 z 2 ), b1 = S( e )( z 2 − z3 ), c1 = S( e )( ρ3 − ρ 2 ), = 1 ρ2 S( e ) 1 ρ3 1 z1 z2 z3 (2) . Циклической перестановкой индексов в порядке 1, 2, 3 в (2) получаются остальные коэффициенты. Используя (1) и формулы Коши, представим вектор деформаций элемента в виде ερ εz ε( e ) = ε θ = B( e )q( e ) , ε ρя bi 0 где B( e ) = [ B1B2 B3 ]; Bi = ai ci z + bi + ρ ρ ci 0 ci 0 bi (3) , i=1, 2, 3, q( e ) 1( e ) а q( e ) = q2 – вектор узловых перемещений е-го элемента. ( e ) q3 По закону Гука σ( e ) = Dε( e ) , µ µ λ + 2µ µ λ + 2µ µ где D = µ µ λ + 2µ 0 0 0 (4) 0 0 , а λ, µ – параметры Ламе. 0 µ Решение смешанной краевой задачи в случае ее осесимметричности минимизирует функционал энергии: 1 J ( u ) = 2π( ∫ ε|σρdρdz − ∫ u| fρdρdz − ∫ u| pds ) , V2 V s (5) 4 где f, p – вектора массовых и поверхностных сил, V – область, в которой ищется решение, S – граница V. Принимая во внимание (3) и (4), получим аппроксимацию функционала (5): E E E 1 | q( e ) k( e ) q( e ) − 2π( ∑ q(| e ) ∫ A(| e ) fρ∂ρ∂z + ∑ q(| e ) ∫ A(| e )ρ∂s ) , e =1 2 e =1 e =1 v s J( υ ) = ∑ (e) (6) (e) где матрица k( e ) = 2π ∫ B(| e ) DB( e )ρ∂ρ∂z называется матрицей жесткости е-го v( e ) конечного элемента, а матрица 0 a + b ρ + ci z . A( e ) = [ A1 A2 A3 ]; Ai = i i 0 ai + bi ρ + ci z Введем матрицы C( e ) размером 6 × 2G , компоненты которых либо нуль, либо единичные. Для любого m-го узла е-го элемента, совпадающего с i-м узлом в глобальной нумерации узлов конечно-элементной сетки, компоненты C ( e ) 2m − 1,2i − 1; C ( e ) 2m − 1,2i ; C ( e ) 2m ,2i − 1 и C ( e ) 2m ,2i равны 1. После перебора всех элементов и присвоения компонентам C( e ) единицы согласно указанному правилу, оставшиеся компоненты приравниваются к нулю. Если u1 v 1 . υ= . . uG v G – вектор смещений узлов согласно глобальной нумерации, то q( e ) = C( e )υ . (7) Учитывая (7), запишем (6) в виде J( υ ) = или E1 E 1 | E | υ ( ∑ C( e ) K ( e ) C( e ) υ − 2π( υ| ∑ C(| e ) ∫ A(| e ) fρ∂ρ∂z +υ| ∑ C(| e ) ∫ A(| e )ρ∂s + ) ) 2 e =1 e =1 e =1 v( e ) s( e ) 5 J( υ ) = Функционал (8) (8) 1 | υ Kυ − υ|( F + ρ ) . 2 принимает минимальное значение, если u ∂J = 0 ; υi = i ; I =1,2,…, σ . ∂υi vi Эти условия сводятся к системе линейных алгебраических уравнений относительно вектора глобальных узловых перемещений Kυ = F + ρ , (9) матрица коэффициентов которой К называется матрицей жесткости системы конечных элементов. Решение υ позволяет установить деформации и напряжения по формулам (3), (4). Иногда в элементах полезно задавать начальные деформации или напряжения, тогда видоизменяется связь (4), которая в этих случаях соответственно имеет вид: σ( e ) = D( ε( e ) − ε(0e ) ) ; σ( e ) = Dε( e ) + σ(0e ) , (10) где ε(0e ) и σ(0e ) – начальные деформации и напряжения, а к правой части (9) добавится слагаемое Q, соответственно равное E Q = 2π ∑ C(| e ) B(| e ) D ε(0e ) , (11) e =1 или E Q = −2π ∑ C(| e ) B(| e )σ(0e ) . (12) e =1 После решения системы Кυ = F + ρ + Q напряжение вычисляются согласно (10). Список литературы 1. Зенкевич, О. С. Метод конечных элементов в технике / О. С. Зенкевич. – М. : Мир, 1975.