Метод оценки вероятностей ошибок первого и
реклама

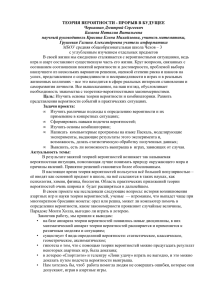
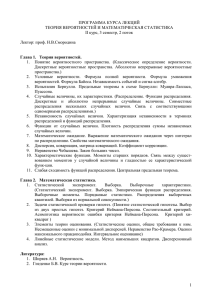
5Г УДК 629.735.33.015.075 М.Г. Глубокая Центральный аэрогидродинамический институт (ЦАГИ) им. Н.Е. Жуковского, г. Жуковский, Россия dynamics15@tsagi.ru Метод оценки вероятностей ошибок первого и второго рода системы поддержки принятия решений на этапе взлёта магистрального самолёта* В статье рассматривается метод оценки вероятностей ошибок первого и второго рода системы поддержки принятия решений на этапе взлёта магистрального самолёта. Данные вероятности зависят от частоты появления значения контролируемого на взлёте параметра в критической области, что является критерием при принятии системой решения о приемлемости текущей динамики разбега. Для определения данных вероятностей необходимо, во-первых, провести статистическое моделирование как безаварийного взлёта, так и взлётов в условиях аварийных ситуаций, с учётом погрешностей всех участвующих в алгоритме контроля взлёта параметров. Во-вторых, необходимо назначить границу критической области нахождения контролируемого параметра, которая на основании распределений, полученных в результате статистического моделирования, определяет вероятности нахождения одного измерения контролируемого параметра вне и внутри критической области. В-третьих, необходимо назначить минимальное количество измерений контролируемого параметра, принадлежащих критической области, при котором ситуацию можно с уверенностью расценивать как аварийную. Введение Разрабатываемая автором система поддержки принятия решений на этапе взлёта магистрального самолёта предназначена для предотвращения потенциально опасных ситуаций на разбеге самолёта, приводящих к авиационным происшествиям. Система поддержки принятия решений производит контроль динамических характеристик разбега, на основе результатов контроля принимает решение о приемлемости текущей ситуации и, в случае оценки ситуации как критичной, выдаёт экипажу предупреждение. Требование к надёжности системы поддержки принятия решений заключается в том, чтобы вероятности ошибок первого и второго рода были ничтожно малы. Ошибка первого рода – это ложное срабатывание системы, которое влечёт за собой необоснованное прерывание взлёта, и, как следствие, сбой в работе аэропорта, финансовые затраты на техническое обслуживание самолёта, на пересадку пассажиров на другой борт и т.п. Более того, из-за частых ложных срабатываний экипаж теряет доверие к системе; это чревато тем, что в случае, если система среагирует на действительно опасную ситуацию, экипаж сочтёт это за очередное ложное срабатывание и не предпримет соответствующих действий, вследствие чего произойдёт авиационное происшествие. Ошибка второго рода – это пропуск опасной ситуации, который может привести к авиационному происшествию. Более того, ответственность экипажа самолёта, оборудованного системой поддержки принятия решений, за принятие самостоятельного * 396 Работа поддержана грантом молодых специалистов ЦАГИ. «Искусственный интеллект» 3’2006 Метод оценки вероятностей ошибок первого и второго рода системы… 5Г решения снижается по сравнению с тем случаем, когда самолёт не оборудован данной системой, поскольку экипаж надеется на помощь системы. Следовательно, если самолёт оборудован системой поддержки принятия решений, но она не распознаёт опасные ситуации, то риск авиационного происшествия на таком самолёте возрастает по сравнению с самолётом, не оборудованным системой. Вероятности ошибок первого и второго рода зависят от частоты появления значения контролируемого на взлёте параметра в критической области (т.е. за пределами доверительной области значений, характеризующей безаварийный взлёт), что является критерием при принятии системой решения о приемлемости текущей динамики разбега. Эффективная взлётная масса как контролируемый на разбеге параметр В качестве контролируемого параметра на этапе разбега автором было предложено использовать параметр, названный «эффективной взлётной массой», математическое определение которого следующее [1]: K Px − X − 1 ⋅ ( Py + Y ) K2 , (1) m* = K1 (n x − ⋅ ny ) ⋅ g K2 где m* – эффективная взлётная масса; Рх и Ру – составляющие тяги по осям ОX и ОY связанной системы координат соответственно; X – аэродинамическая продольная сила; Y – аэродинамическая нормальная сила; nx и ny – продольная и вертикальная перегрузки самолёта, определённые в связанной системе координат; g – ускорение свободного падения. Параметры K1 и K2 выражения (1) определяются следующим образом: K 1 = sin(ϑ − η) − f ⋅ cos(ϑ − η) (2) , K 2 = cos(ϑ − η) + f ⋅ sin(ϑ − η) где f – коэффициент трения качения; ϑ – угол тангажа; η – уклон ВПП (положительным будем считать встречный уклон ВПП, когда самолёт едет в горку). Классификация аварийных ситуаций на этапе взлёта Согласно данным об авиационных происшествиях, ситуациями, приводящими к авиационным происшествиям на этапе взлёта, являются: − падение тяги двигателей; − превышение расчётной взлётной массы; − неисправность в тормозной системе шасси; − ошибочно выпущенные интерцепторы; − убранная механизация крыла; − повышенный коэффициент трения качения; − обледенение самолёта. «Штучний інтелект» 3’2006 397 Глубокая М.Г. 5Г Перечисленные аварийные ситуации на взлёте можно классифицировать в соответствии с тем, на какие характеристики самолёта они оказывают влияние. Класс (1) – ситуации, приводящие к ухудшению разгонных свойств самолёта. К данному классу относятся следующие ситуации: − падение тяги двигателей; − превышение расчётной взлётной массы; − ошибочно выпущенные интерцепторы; − неисправность в тормозной системе шасси; − повышенный коэффициент трения качения. Данные аварийные ситуации опасны превышением дистанций как нормального, так и прерванного взлёта. Класс (2) – ситуации, приводящие к ухудшению аэродинамических характеристик самолёта. К данному классу относятся следующие ситуации: − убранная механизация крыла; − обледенение самолёта; − ошибочно выпущенные интерцепторы. Данные аварийные ситуации на этапе разбега самолёта до момента поднятия носовой стойки не влияют на характеристики разбега (за исключением выпущенных интерцепторов, о чём было сказано выше), однако все они опасны сваливанием самолёта как в момент подъёма носового колеса, так и на последующих этапах взлёта вследствие недостатка подъёмной силы на расчётных скоростях взлёта и дефицита запаса по углу атаки и скорости. Определение вероятностей ошибок первого и второго рода системы Рассмотрим процесс разбега самолёта. Имеется n измерений эффективной взлётной массы. Требуется на основе данных измерений принять решение о приемлемости текущей динамики разбега. Для назначенной доверительной области, а также минимального количества измерений k из n, принадлежащих критической области, при котором можно с уверенностью расценивать ситуацию как аварийную, вероятность ошибки первого рода определяется на основе биномиального распределения [2]: n α = ∑ C ni ⋅ p1i ⋅(1 − p1 ) n −i , (3) i =k где α – вероятность ошибки первого рода; n – общее число измерений эффективной взлётной массы; k – минимальное количество измерений, принадлежащих критической области, при котором ситуацию можно с уверенностью расценивать как аварийную; C ni – биномиальный коэффициент [3]; p1 – вероятность появления одного измерения эффективной взлётной массы за пределами доверительного интервала значений, характеризующего безаварийный взлёт. При этом вероятность ошибки второго рода определяется также на основе биномиального распределения [2]: β= n ∑ Cni ⋅ p2i ⋅(1 − p2 )n −i , (4) i = n − ( k −1) 398 «Искусственный интеллект» 3’2006 Метод оценки вероятностей ошибок первого и второго рода системы… 5Г где β – вероятность ошибки второго рода; p2 – вероятность появления одного измерения эффективной взлётной массы внутри доверительного интервала значений (характеризующего безаварийный взлёт), определённая для случая аварийной ситуации на взлёте. Для получения вероятностей p1 и p2 было проведено статистическое моделирование следующих вариантов взлёта для каждого значения взлётной массы самолёта: − 1 цикл (M ≥ 1000 раз). Взлёт в условиях отсутствия аварийной ситуации; − R×L циклов (каждый цикл – M раз). Взлёты в условиях наличия аварийной ситуации. Число L соответствует количеству возможных типов аварийных ситуаций на взлёте. Были смоделированы следующие аварийные ситуации, приводящие к увеличению длины разбега: − падение тяги двигателей; − превышение расчётной взлётной массы; − неисправности в тормозной системе шасси; − повышенный коэффициент трения качения. Кроме того, перед проведением статистического моделирования взлётов в условиях наличия аварийной ситуации было проведено дополнительное моделирование с целью расчёта величин длины разбега в условиях различных значений отклонений параметров самолёта от нормы, приводящих к той или иной аварийной ситуации. Например, задавалась некоторая величина падения тяги двигателей, рассчитывалась длина разбега, значение которой сравнивалось с соответствующим значением длины разбега в случае отсутствия аварийной ситуации, и определялась величина превышения. В результате данного моделирования каждой величине превышения длины разбега были поставлены в соответствие конкретные значения отклонений всех параметров, приводящих к данной величине превышения длины разбега (рис. 1). Число R определяется количеством узловых значений превышения длины разбега (например: 50 м, 100 м …1000 м и т.д.), так как величина превышения длины разбега, которая может считаться недопустимой, для каждого конкретного взлёта различна. При каждом запуске моделирования были заданы погрешности всех параметров, которые участвуют в определении эффективной взлётной массы (1). Данные погрешности были заданы в виде случайных величин, распределённых по нормальному закону с известными (например, из паспорта прибора) числовыми характеристиками. Причём, в силу того что измерение многих параметров на разбеге сопровождается тряской, погрешности параметров были заданы в виде суммы двух величин, одна из которых была задана в виде постоянной случайной величины в течение разбега – так моделировалась погрешность измерительного средства, другая была задана в виде случайной величины в каждый момент их измерения – так моделировалась тряска. Наряду с этим было задано отклонение фактической тяги двигателя от расчётной в виде случайной величины, распределённой по нормальному закону (по экспертным оценкам допустимое отклонением фактической тяги от расчётной составляет не более 2 %); коэффициент трения качения был задан в виде случайной величины, распределённой по равномерному закону в диапазоне 0,02 ÷ 0,04. В результате каждого цикла моделирования была сформирована матрица значений эффективной взлётной массы размером M×T, где T – количество моментов регистрации данного параметра на разбеге. По значениям каждого из T столбцов матрицы были получены законы распределения значений эффективной взлётной массы для всех случаев. Проверка полученных законов распределения на соответствие нормальному закону распределения осуществлялась с помощью критерия Колмогорова – Смирнова [2]. «Штучний інтелект» 3’2006 399 Глубокая М.Г. 5Г 600 Превышение длины разбега, м 500 400 300 200 100 0 0 2000 4000 6000 8000 10000 Величина превышения расчётной взлётной массы самолёта, кг 0 10 20 30 40 50 Величина недостатка суммарной тяги двигателей, % максимальной взлётной 0.03 0.05 0 10 0.07 0.09 0.11 0.13 20 30 40 50 Величина коэффициента трения качения Давление в тормозах, % от максимума в режиме нормального торможения колёс Тип аварийной ситуации на взлёте Превышение расчётной взлётной массы самолёта Недостаток тяги двигателей Повышенный коэффициент трения качения колёс Неисправность в тормозной системе шасси Рисунок 1 – Превышение длины разбега при различных аварийных ситуациях Рассмотрим случай взлёта, когда имеет место превышение расчётной взлётной массы, приводящее к превышению длины разбега на 50 м. Распределение плотности вероятности для данной аварийной ситуации располагается очень близко по отношению к распределению плотности вероятности, характеризующему безаварийный взлёт (рис. 2). Зададим границу критической области (назовём её χ) следующим образом: χ = µбезав +σбезав, где µбезав и σбезав – соответственно математическое ожидание и среднее квадратическое отклонение распределения, характеризующего безаварийный взлёт. Вероятность p1 для выбранной границы – площадь графика функции плотности 400 «Искусственный интеллект» 3’2006 Метод оценки вероятностей ошибок первого и второго рода системы… 5Г вероятности, характеризующего безаварийный взлёт, расположенная правее границы χ; в рассматриваемом примере p1 = 0,16. Вероятность p2 для выбранной границы – площадь графика функции плотности вероятности, характеризующего взлёт с превышением взлётной массы, расположенная левее границы χ; в рассматриваемом примере p2 = 0,15. Задав количество фиксируемых измерений n = 20 и желаемую величину вероятности ошибки первого рода α = 1⋅10-6, на основе биномиального распределения (3), (4) найдём минимальное количество измерений k, при котором ситуацию можно с уверенностью расценивать как аварийную, а также вероятность ошибки второго рода β. Для заданных условий k = 14, β = 2⋅10-2. Для тех же условий, но для n = 100, k = 14, β = 2,5⋅10-15. Граница между областями χ Плотность вероятности Безаварийный взлёт Вероятность р2 Доверительная область Взлёт с превышением взлётной массы Вероятность р1 Критическая область Значение эффективной взлётной массы Рисунок 2 – Распределения эффективной взлётной массы для случая безаварийного взлёта и взлёта с превышением взлётной массы, полученные в результате статистического моделирования На рис. 3 представлены графики зависимостей числа k и вероятности ошибки второго рода β от числа n для заданной вероятности ошибки первого рода α = 1⋅10-6 при различных положениях границы критической области. Из рисунка видно, что для конкретного положения границы критической области вероятность ошибки второго рода тем меньше, чем больше измерений n; для одного и того же количества измерений n вероятность ошибки второго рода тем больше, чем дальше располагается граница критической области от центра распределения, характеризующего безаварийный взлёт. На рис. 4 представлены зависимости вероятностей ошибки второго рода от вероятности ошибки первого рода для различных n. На рис. 5 представлена оперативная характеристика критерия статистической гипотезы [3] – зависимости вероятностей правильного распознавания опасной ситуации от вероятности ложного распознавания опасной ситуации для различных n. Построенные зависимости показывают, что только при больших количествах измерений n (n > 50) обеспечиваются одновременно приемлемые уровни вероятностей ошибок первого и второго рода (события, вероятность появления которых меньше 1⋅10-9, считаются практически невероятными). «Штучний інтелект» 3’2006 401 Глубокая М.Г. 5Г Вероятность ошибки второго рода 1 k 40 0.1 χ = µбезав + σбезав 0.01 0.001 30 χ = µбезав + 2σбезав 0.0001 1E-005 1E-006 20 1E-007 Вероятность ошибки первого рода = 10-6 1E-008 1E-009 1E-010 10 χ=µбезав+σбезав 1E-011 1E-012 χ = µбезав + 2σбезав 1E-013 0 1E-014 0 20 40 60 80 100 0 20 40 60 80 100 n n Рисунок 3 – Зависимость k и вероятности ошибки второго рода от n для двух положений границы критической области при фиксированной вероятности ошибки первого рода 1 Вероятность ошибки второго рода β 0.1 0.01 0.001 0.0001 1E-005 1E-006 n = 10 n = 20 n = 50 n = 100 1E-007 1E-008 1E-009 1E-009 1E-008 1E-007 1E-006 1E-005 0.0001 0.001 0.01 0.1 1 Вероятность ошибки первого рода α Рисунок 4 – Зависимость вероятности ошибки второго рода от вероятности ошибки первого рода для различных n 402 «Искусственный интеллект» 3’2006 Метод оценки вероятностей ошибок первого и второго рода системы… 5Г 1 0.8 0.6 1−β n = 10 0.4 n = 20 n = 50 n = 100 0.2 0 1E-009 1E-008 1E-007 1E-006 1E-005 0.0001 0.001 0.01 0.1 1 α Рисунок 5 – Оперативная характеристика критерия статистической гипотезы Выводы Предложенный метод контроля динамических характеристик разбега обеспечивает возможность достижения требуемых низких величин вероятностей ошибок первого и второго рода даже в особо сложных случаях, когда аварийная ситуация может возникнуть вследствие превышения длины разбега менее, чем на 100 м. Литература 1. Глубокая М.Г. Применение методов искусственного интеллекта при контроле взлета магистрального самолета // Искусственный интеллект. – 2002. – № 3 . – С. 376-382. 2. Джонсон Н., Лион Ф. Статистика и планирование эксперимента в технике и науке. Методы обработки данных: Пер. с англ. – М.: Мир, 1980. 3. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. – М.: Наука, 1984. M.G. Glubokaya The Metod of Estimation of First and Second Type Error Probabilities of an Onboard Crew Decision Support System at the Takeoff Phase of Flight The method of estimation of first and second type error probabilities of an onboard crew decision support system at the takeoff phase of flight has been considered in this paper. These probabilities depend on the number of controlled parameter appearance in the critical domain, that is the criterion of the system decision of the current takeoff roll dynamics acceptability. In order to estimate first and second type error probabilities it is necessary firstly to fulfil statistical simulation of both accident-free takeoff and takeoffs in accident conditions, taking into account the errors of all the parameters that take part in the takeoff monitoring algorithm. Secondly, it is necessary to set the bound of the critical domain that determinates the probabilities of controlled parameter one point appearance in and beyond the critical domain. These probabilities are calculated on the controlled parameter distributions which are resulted from statistical simulation. Thirdly, it is necessary to set the minimum number of controlled parameter appearance that belong to critical domain, in case of which the takeoff situation is with certainty considered as accident. Статья поступила в редакцию 19.06.2006. «Штучний інтелект» 3’2006 403