Тема 2. Основные понятия и определения в теории и практике
реклама

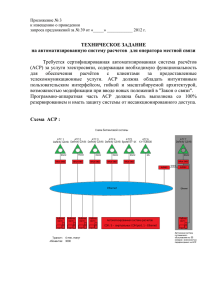
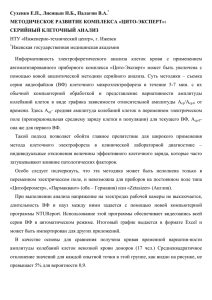
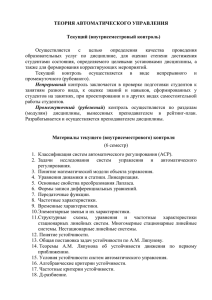
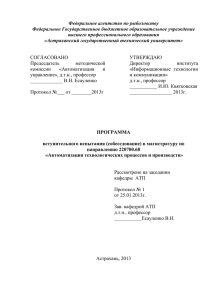
Тема 2. Основные понятия и определения в теории и практике автоматического регулирования параметрами жизнеобеспечения (2 часа) Для того чтобы была обеспечена нормальная работа объекта регулирования (ОР) во всей области гарантированных режимов, он должен обладать определенной статической характеристикой, которая связывает режимные параметры энергоустановок в равновесных процессах, последняя может быть выражена аналитической или графической зависимостью регулируемой величины от нагрузки рис.2.1. Рисунок 2.1 Статические характеристики объекта регулирования Режимы работы ОР и их систем регулирования называются равновесными или установившимися, если регулируемая величина и все действующие в системе возмущения не изменяются во времени. Так, установившиеся движение турбогенератора возможно при равенстве момента движущих сил Мт, развиваемых паром или газом на лопатках турбины, и момента сил сопротивления электромагнитных сил генератора Мг, т.е. М т 0 М г 0 М 0 . В действительности момент сил сопротивления, зависящий от потребителя (электросети), в процессе работы турбогенератора может изменяться, вследствие чего равновесие в силовом поле взаимодействующих сил нарушается, и ротор турбогенератора получает ускорение или замедление, из-за чего равновесный режим нарушается. При неустановившемся (неравновесном) режиме в действие приходит система регулирования. Связи между элементами системы регулирования и объектом регулирования в переходных процессах называются динамическим направленного действия. Они определяют характер переходных процессов в системе. Задача системы регулирования – перевести ОР в такой режим, который соответствует равновесному состоянию системы. Изучение переходных процессов составляет вторую основную задачу автоматического регулирования и относится к динамике регулирования. В исследованиях динамических процессов регулирования, предполагают, что к ОР или регулятору приложены некоторые воздействия. Их называют соответственно: возмущающими и управляющими. В зависимости от характера связей системы регулирования делятся на системы работающие по рис.2.2.: 1) замкнутому циклу; 2) разомкнутому циклу; Рисунок 2.2 Система регулирования Наличие обратной связи между ОР и регулятором, которую называют главной, является необходимым условием автоматической системы регулирования (АСР), т.е. АСР это замкнутые динамические системы направленного действия. Системы регулирования, где управляющее воздействие изменяется в зависимости от времени по заданному закону, носят название систем программного регулирования. Структура АСР и ее основные элементы Регулятор, выполняя свои функции, должен перемещать регулировочные органы (РО) в требуемом направлении, для обеспечения устойчивого движения системы. При этом нередко для перестановки РО требуются затраты значительной мощности, которую не могут развить регуляторы. В таких случаях в составе АСР предусматривают усилительные устройства, которые включают в передаточный механизм между регулятором и РО. Усилители воспроизводят все указания от регулятора, и мощность сигнала от них должна быть достаточной для необходимого перемещения регулировочных органов. Автоматическое регулирование без участия усилителей называется прямым регулированием, а при наличии их в передаточном механизме - непрямым регулированием. АСР с использованием электрической энергии нашли широкое применение для автоматического управления жизнеобеспечением жилых домов рис.2.3. Примером использования в АСР комбинированного вида энергии является система регулирования турбины, в которой установлен электрогидравлический преобразователь для преобразования электрического сигнала от регуляторов энергосистемы (корректора частоты, противоаварийной автоматики, регулятора обменной мощности) в гидравлический сигнал для гидравлической системы регулирования турбоагрегата. Рисунок 2.3 Схема электрической системы регулирования Переходные процессы в АСР Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину возмущающее и воздействие направление не должно изменения регулируемого существенно влиять на параметра, изменение регулируемых параметров. Для устойчивых АСР переходные процессы сходящиеся, т.е. y вых стремится к заданному значению или возвращается к прежнему рис.2.4.В неустойчивых АСР переходные процессы расходящиеся: регулируемый параметр отклоняется от своего заданного значения на большую величину с возрастающей скоростью. Рисунок 2.4 Процессы в АСР АСР может находится на границе устойчивости, когда регулируемый параметр не принимает заданного значения и его отклонения имеет постоянную амплитуду отклонения от заданного значения рис.2.4Б. При том или ином воздействии требуемые и действительные значения регулируемой величины могут зд отличаться друг от друга. Разность между заданным Yвых и действительным значением регулируемой величины yвых называется ошибкой регулирования. Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах - статическая ошибка, отклонение. Статические и астатические системы регулирования Автоматические системы регулирования принято подразделять на статические и астатические в зависимости от того имеют ли они или не имеют отклонение или ошибку в установившемся состоянии при воздействиях, удовлетворяющих определенным условиям. Система регулирования называется статической по отношению к возмущающему воздействию, если при воздействии, стремящемся с течением времени к некоторому установившемуся постоянному значению, отклонение регулируемой величины так же стремится к постоянному значению, зависящему от величины воздействия. Система регулирования называется астатической по отношению к возмущающему воздействию, если при воздействии, стремящемся с течением времени к некоторому установившемуся постоянному значению, отклонение регулируемой величины стремится к нулю вне зависимости от величины воздействия. В статической системе регулирования статическая характеристика всегда изображается наклонной линией рис.2.5а. Система регулирования называется статической по отношению к управляющему воздействию, если при воздействии, стремящемуся с течением времени к некоторому установившемуся постоянному значению, ошибка так же стремится к постоянному значению, зависящему от величины воздействия. Система регулирования называется астатической по отношению к управляющему воздействию, если при воздействии, стремящемуся с течением времени к некоторому установившемуся постоянному значению, ошибка стремится к нулю вне зависимости от величины воздействия. Для астатических систем регулирования статическая характеристика всегда изображается прямой, параллельной оси абсцисс рис.2.5б. Рисунок 2.5 Статическая система Принципы автоматического регулирования Влияние возмущающих воздействий на регулируемую величину можно компенсировать или регулированием по возмущению или регулированием по отклонению регулируемой величины от ее заданного значения рис 2.6. Рисунок 2.6 Схема реализации принципов автоматического регулирования В первом случае работа АСР основана на контроле возмущающих воздействий. В этих системах воздействие на регулировочные органы ОР осуществляется почти без запаздывания по отношению к моменту возникновения возмущения, т.е. еще до того как успеет существенно измениться значение регулируемой величины. В этом достоинство систем. Недостатком такой системы является то, что флуктуации нагрузки (случайные возмущения) и неизбежные неточности в работе системы регулирования будут вызывать отклонения регулируемой величины, накапливающееся со временем и зачастую выходящее за допустимые пределы. При работе АСР по отклонению регулируемого параметра почти исключается возможность неоправданного срабатывания регулятора. Недостаток этих АСР в том, что регулирующее воздействие на объект регулирования будет лишь по мере накопления отклонения регулируемой величины и следовательно, будет запаздывать по отношению к событию возмущения. Сочетание достоинств с устранением недостатков этих систем возможно в комбинированной АСР, в которых воздействие на регулятор производится по возмущению (или по нескольким возмущениям) и по отклонению регулируемой величины от заданного значения. Примером такой системы является АСР питания барабанного котла. Требования к АСР: 1) к запасу устойчивости (при том, что процессы регулирования должны быть сходящиеся); 2) к статической точности (величине допустимой ошибки регулирования в равновестном режиме); 3) к качеству переходного процесса (процессы должны быть не только сходящиеся, но и быстро затухающие); 4) к динамической точности - к величине ошибок (отклонений) в переходном процессе при наличии непрерывно изменяющихся воздействий. Вопросы для самоконтроля 1. Режимы работы объекта регулирования. 2. Структура АСР и ее основные элементы. 3. Виды переходных процессов при автоматическом регулировании. 4. Статические и астатические системы регулирования. 5. Принципы автоматического регулирования. 6. Требования к АСР.