ошибки самонастройки автокомпенсатора шумовых помех в
реклама

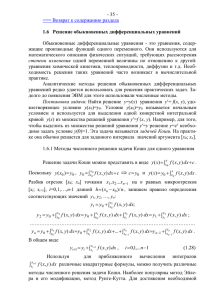
Вестник БГУ. Сер. 1. 2009. № 2 УДК 621.396.98 И.Н. ДАВЫДЕНКО, В.И. ПАПУШОЙ, В.С. САДОВ, И.С. ХРАПУН ОШИБКИ САМОНАСТРОЙКИ АВТОКОМПЕНСАТОРА ШУМОВЫХ ПОМЕХ В РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ СКАНИРОВАНИЕМ The paper is devoted to the dynamic errors of self-adjustment circuits sidelobe canceler of jammer for the radar with high speed of continuous angle scanning. Is considered one channel canceler with shaping filter, which designed for the sinusoidal changing of the adaptive weight. The estimation of efficiency of sidelobe canceler is obtained for the case of dynamic errors. Задача анализа эффективности автокомпенсаторов шумовых помех для радиолокационной станции (РЛС) с быстрым непрерывным сканированием диаграммы направленности является актуальной. В этом случае основным фактором, влияющим на эффективность компенсации, выступают динамические ошибки. Синтез цепей фильтрации для такого автокомпенсатора в предположении изменения задающего воздействия по гармоническому закону описан в работе [1]. Получим выражения для динамических ошибок и эффективности автокомпенсатора для гармонического и случайного задающих воздействий. Эквивалентная структурная схема измерителя весового коэффициента Уравнения фильтрации весового коэффициента автокомпенсатора шумовой помехи в РЛС с непрерывным сканированием для задающего гармонического воздействия могут быть представлены в следующем виде [1]: dWˆ = VˆW + K11 ( t ) ⋅ ⎡⎣Wзад ( t ) − Wˆ ( t ) + η ( t ) ⎤⎦ , (1) dt dVˆW = −Ω 2 ⋅ Wˆ + K12 ( t ) ⋅ ⎡⎣Wзад ( t ) − Wˆ ( t ) + η ( t ) ⎤⎦ , (2) dt 26 Физика где Ŵ – измеренное значение весового коэффициента; VˆW – измеренное значение скорости измене- ния весового коэффициента; K11 ( t ) – коэффициент фильтрации сигнала ошибки по положению; K12 ( t ) – коэффициент фильтрации сигнала ошибки по скорости; Ω – постоянная величина, характе- ризующая скорость углового сканирования; Wзад ( t ) – задающее воздействие измерителя; η ( t ) – случайная составляющая сигнала ошибки. Эквивалентная структурная схема измерителя весового коэффициента автокомпенсатора в соответствии с уравнениями (1) и (2) приведена на рисунке. Wзад ( t ) η(t ) K 11 (t ) dWˆ dt Σ dVˆW dt Σ K 12 (t ) ∫ Ŵ VˆW ∫ –Ω2 Эквивалентная структурная схема измерителя весового коэффициента Характеристики контура измерения весового коэффициента В соответствии со структурной схемой передаточная функция разомкнутого измерителя весового коэффициента описывается выражением K +K p K Р ( p ) = 12 2 112 . Ω +p Передаточную функцию замкнутого измерителя найдем следующим образом: Wˆ ( p ) KР ( p) K12 + K11 p K ( p) = = = . Wзад ( p ) 1 − K Р ( p ) ( K12 + Ω 2 ) + K11 p + p 2 Аналогично можно получить выражение для полосы пропускания замкнутого измерителя весовых коэффициентов: ∞ 2 K11 K122 1 . ∆f 0W = K j ω d ω = + ( ) ∫ 2π −∞ 2 2 ⋅ ( K12 + Ω 2 ) ⋅ K11 Передаточная функция динамических ошибок описывается следующей формулой: Ω2 + p2 ) ( Wзад ( p ) − Wˆ ( p ) K ош ( p ) = . = 1− K ( p) = Wзад ( p ) ( K12 + Ω2 ) + K11 p + p 2 При переходе в частотную область с учетом соотношения p = jω можно получить K ош ( jω) = (ω − Ω ) (ω − Ω ) − K − K 2 2 2 2 12 11 ⋅ jω . (3) Для обеспечения приемлемого уровня динамических ошибок фильтрации весового коэффициента должно соблюдаться условие: K12 >> ω2 , K12 >> K11ω. В этом случае выражение (3) упростится: (ω K ош ( jω) ≈ − 2 − Ω2 ) K12 . (4) 27 Вестник БГУ. Сер. 1. 2009. № 2 Характеристики контура измерения скорости весового коэффициента В соответствии с рисунком передаточная характеристика разомкнутого контура фильтрации скорости весового коэффициента описывается выражением ⎛ ⎞ K K11 ⋅ ⎜ Ω 2 − 12 p ⎟ K11 ⎠ p ⎝ ⋅ K РV ( p ) = − . 2 Ω + p2 K11 + p Передаточную функцию замкнутого устройства фильтрации скорости найдем следующим образом: Vˆ ( p ) K РV ( p ) − K11 ⋅ Ω 2 + K12 ⋅ p K 0V ( p ) = W = = (5) . 1 ( K12 + Ω 2 ) + K11 p + p 2 Wзад ( p ) 1 − K РV ( p ) ⋅ p В соответствии с выражением (5) можно получить полосу пропускания замкнутого устройства фильтрации скорости весового коэффициента: ∞ 2 K122 K11 ⋅ Ω 4 1 . ∆f 0V = K j ω d ω = + ∫ 0V ( ) 2π −∞ 2 K11 2 ( K12 + Ω 2 ) Передаточная функция ошибок скорости относительно задающего воздействия имеет вид ( Ω2 + p 2 ) ⋅ ( K11 + p ) . W ( p ) p − Vˆ ( p ) K ош0V ( p ) = зад = p − K 0V ( p ) = Wзад ( p ) ( K12 + Ω2 ) + K11 p + p 2 (6) После перехода в частотную область будем иметь ω2 − Ω 2 ) ⋅ ( K11 + jω) ( K ош0V ( jω) = 2 . ω − K11 jω − ( K12 + Ω 2 ) Для схемы фильтрации скорости можно получить следующие приближенные выражения для ошибок ( K12 >> K11ω, K11 >> ω ): K ош0V ( jω) ≈ (ω − 2 − Ω 2 ) ⋅ K11 . K12 Динамические ошибки самонастройки при гармоническом задающем воздействии Пусть задающее воздействие автокомпенсатора подчиняется гармоническому закону: Wзад = АW cos ( ωt + ϕW ) . В этом случае согласно (4) динамическая ошибка измерения весового коэффициента описывается следующим приближенным выражением: ω2 − Ω 2 ) ( ∆Wдин ≈ − АW cos ( ωt + ϕW ) ⋅ . K12 Соответственно оценочное значение весового коэффициента описывается выражением ⎡ ( ω2 − Ω 2 ) ⎤ ˆ ⎥. W = Wзад − ∆Wдин = АW cos ( ωt + ϕˆ W ) = АW cos ( ωt + ϕW ) ⋅ ⎢1 + K12 ⎢⎣ ⎥⎦ Таким образом, динамическая ошибка измерения весового коэффициента приводит к изменению его амплитуды при неизменном значении фазы. Точное значение скорости изменения задающего воздействия описывается как VW = − АW ω sin ( ωt + ϕW ) = − AV sin ( ωt + ϕW ) . Динамическая ошибка измерения скорости весового коэффициента имеет вид ( ω2 − Ω2 ) ⋅ K . ∆Vдин ≈ − АW cos ( ωt + ϕW ) ⋅ 11 K12 28 Физика Соответственно оценочное значение скорости весового коэффициента VˆW = VW − ∆Vдин = − АˆV sin ( ωt + ϕW + ∆ϕV ) , ⎡ ( ω2 − Ω 2 ) ⎤ ⎡ ( ω2 − Ω 2 ) ⎤ где АˆV = АW ω ⋅ 1 + ⎢ K11 ⎥ = АW ω2 + ⎢ K11 ⎥ ; ⎢⎣ ω⋅ K12 ⎥⎦ ⎢⎣ K12 ⎥⎦ ( ω2 − Ω2 ) K = − arcsin ⎡⎢ 1 ( ω2 − Ω2 ) K ⎤⎥ . ∆ϕV = −arctg 11 11 ω⋅ K12 ⎢⎣ АˆV ω⋅ K12 ⎥⎦ Отбрасывая ошибки второго порядка малости, последнее выражение можно записать в следующем виде: ⎛ ( ω2 − Ω2 ) ⋅ K ⎞⎟ . VˆW ≈ − АW ω sin ⎜ ωt + ϕW − 11 ⎜ ⎟ ω ⋅ K12 ⎝ ⎠ Таким образом, динамическая ошибка измерения скорости весового коэффициента приводит к смещению фазы измеренного значения скорости при неизменной амплитуде. Динамические ошибки при случайном задающем воздействии Пусть спектр задающего воздействия соответствует колебательному звену и имеет вид 1 (7) gW ( iω) = . 2 ( iω) + 2α ⋅ iω + ω02 2 2 Дисперсия такого задающего воздействия описывается выражением ∞ 2 ∞ 2 1 1 1 1 σW2 зад = gW ( iω) ω = dω = 2 . 2 ∫ ∫ 2 2π −∞ 2π −∞ ω0 + 2α ( iω) + ( iω) 4ω0 α Дисперсия динамических ошибок самонастройки весового коэффициента может быть получена следующим образом [2]: ∞ 2 2 1 σ2∆Wдин = gW ( iω) K ош ( jω) d ω. ∫ 2π −∞ В частности, с учетом выражений (3) и (7) можно получить σ 2 ∞ α 0 + α 2 ( iω ) 1 = d ω, ∫ 2π −∞ β0 + β1 ( iω) + β2 ( iω)2 + β3 ( iω)3 + β 4 ( iω )4 2 2 ∆Wдин где α 0 = Ω 2 ; α 2 = 1; β0 = ( K12 + Ω 2 ) ω02 ; β1 = 2α ( K12 + Ω 2 ) + K11ω02 ; β2 = ( K12 + Ω 2 ) + 2αK11 + ω02 ; β3 = K11 + 2α; β4 = 1. После использования интеграла Парсеваля 4-го порядка выражение для дисперсии динамической ошибки измерения весового коэффициента примет окончательный вид: 2 ⎛ ⎛ Ω2 ⎞ K122 Ω 4 ( 2α + K11 ) ⎞ ⎜ ⎟ − + α + 1 2 ⎜ 2 ⎟ ⎜ ( K12 + Ω 2 ) K11ω02 ω04 ( K12 + Ω 2 ) ⎟ ⎝ ω0 ⎠ ⎝ ⎠ σ2∆Wдин = σW2 зад (8) . 2 ⎛ K 2 ⎛ K + Ω2 ⎞2 ⎞ ⎡ ( K12 + Ω 2 ) K11 K ⎤ K + Ω ( ) 12 ⎜ 11 + ⎜1 − 12 2 + 112 + 2α ⎥⎟ ⎟ + 2α ⎢ 4 ⎜ ω02 ⎝ ω0 ω ω ω04 ⎢ ⎥⎦ ⎟⎠ 0 0 ⎠ ⎣ ⎝ При выполнении условий K12 >> ω02 , K11 >> ω0 , K12 >> K11ω0 выражение (8) примет более простой вид: 2 ⎛ K12 ω04 ⎛ ⎛ Ω 2 ⎞ Ω 4 K11 ⎞ ⎞ ⎜ σ ≈σ − + α + 1 2 (9) ⎜ ⎟ ⎜ ⎟ ⎟. K122 ⎜ ⎝ ω02 ⎠ K11ω02 ω04 K12 ⎠ ⎟ ⎝ ⎝ ⎠ Дисперсия динамической ошибки измерения скорости весового коэффициента описывается общим выражением: ∞ 2 2 1 σ2∆Vдин = gW ( iω) K ош0V ( jω) d ω. (10) ∫ 2π −∞ 2 ∆Wдин 2 Wзад 29 Вестник БГУ. Сер. 1. 2009. № 2 С учетом (6) и (7) выражение (10) конкретизируется в виде σ 2 ∞ α 0V + α1V ( iω) + α 2V ( iω) + α 3V ( iω) 1 = d ω, ∫ 2π −∞ β0 + β1 ( iω) + β2 ( iω)2 + β3 ( iω)3 + β 4 ( iω)4 2 2 ∆Vдин 3 где α 0V = Ω 2 K11 ; α1V = Ω 2 ; α 2V = K11 ; α3V = 1. После использования интеграла Парсеваля дисперсия динамической ошибки измерения скорости весового коэффициента примет вид 2 Ω2 ⎞ 2 2 ⎛ ω + − K 1 ( 0 11 ) ⎜ ω2 ⎟ + 2α ⋅ FV 2 2 0 ⎠ ⎝ σ∆Vдин = σWзад , 2 2 ⎛ K 2 ⎛ K + Ω2 ⎞ ⎞ ⎡ ( K12 + Ω 2 ) K11 K ⎤ + Ω K ( 12 ) ⎥ ⎟ ⎜ 112 + ⎜1 − 12 2 + 112 + 2α ⎟ + 2α ⎢ 4 ⎜ ω0 ⎝ ω0 ω0 ω0 ω04 ⎢⎣ ⎥⎦ ⎟⎠ ⎠ ⎝ ⎛ Ω2 K ⎞ K2 K + Ω2 Ω4 K11 + 4 ω2 + 2αK11 + K112 ) . где FV = K11 ⎜ 1 − 2 + 122 ⎟ + 12 2 + 2α 12 2 2 ( 0 ω ω ω ω ω + Ω K K 0 0 ⎠ 11 0 0 0 12 ⎝ При выполнении условий K12 >> ω02 , K11 >> ω0 , K12 >> K11ω0 выражение (11) упростится: (11) 2 ⎡ K12 ω04 2 ⎛ ⎛ Ω 2 ⎞ Ω 4 K11 ⎤ ⎞ 2 2 ⎜ K − + α + 1 2 ⎢ ⎥ ⎟⎟ = σ ∆Wдин K11 . 11 ⎜ 2 2 ⎟ 2 4 ⎜ ω0 ⎠ K12 ⎣ K11ω0 ω0 K12 ⎦ ⎠ ⎝⎝ Влияния ошибок измерения весового коэффициента на эффективность компенсации Эффективность автокомпенсации, обусловленная динамическими ошибками измерения весового коэффициента ∆W , представляет собой отношение среднего квадрата модуля задающего воздействия к среднему значению квадрата модуля ошибок измерения весового коэффициента и описывается следующим общим выражением: σ2∆Vдин ≈ σW2 зад ν ∆Wдин = Wзад 2 σW2 зад = 2 . (12) 2 σ∆Wдин ∆W В частности, для расчета эффективности автокомпенсации, обусловленной динамическими ошибками самонастройки, с учетом (9) и (12) можно рекомендовать следующее приближенное выражение: σW2 K122 ν ∆Wдин = 2 зад ≈ . 4 σ∆Wдин ⎛ ⎛ Ω2 ⎞2 ⎞ ⎛ ⎞ K K Ω ω04 ⎜ ⎜ 1 − 2 ⎟ + 2α ⎜ 12 2 + 4 11 ⎟ ⎟ ⎜ ⎝ ω0 ⎠ ⎝ K11ω0 ω0 K12 ⎠ ⎟⎠ ⎝ Таким образом, получены выражения для динамических ошибок самонастройки одноканального автокомпенсатора шумовых помех в РЛС с быстрым непрерывным сканированием. С этой целью была использована модель задающего воздействия, соответствующая колебательному звену. Показано, что в первом приближении динамические ошибки фильтрации весового коэффициента приводят к изменению его амплитуды, а динамические ошибки фильтрации скорости весового коэффициента – к изменению ее фазы. При совпадении параметра гармонической обратной связи автокомпенсатора Ω и центральной частоты спектра задающего воздействия ω0 происходит минимизация динамических ошибок, уровень которых в этом случае определяется параметром α, характеризующим ширину спектра задающего воздействия. Предложены выражения, позволяющие оценить влияние динамических ошибок самонастройки на эффективность автокомпенсации шумовых помех. 1. Д а в ы д е н к о И . Н . , П а п у ш о й В . И . , Х р а п у н И . С . // Электроника. 2008. № 10. 2. К о н о в а л о в Г . Ф . Радиоавтоматика. М., 1990. Поступила в редакцию 03.11.08. Игорь Николаевич Давыденко – кандидат технических наук, доцент, ведущий научный сотрудник НПРУП «АЛЕВКУРП». Виталий Иванович Папушой – директор НПРУП «АЛЕВКУРП». Василий Сергеевич Садов – кандидат технических наук, доцент кафедры интеллектуальных систем. Игорь Станиславович Храпун – ведущий конструктор НПРУП «АЛЕВКУРП». 30