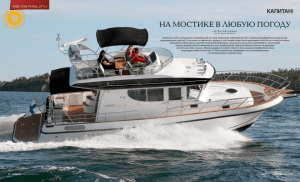
ОСНОВНЫЕ СТАТИЧЕСКИЕ СВОЙСТВА АСИНХРОННОГО
реклама

Элементы теории математического моделирования асинхронных двигателей в составе электропривода www.privodi.ru +7 915 125 42 71 9151254271@rambler.ru 1 ОСНОВНЫЕ СТАТИЧЕСКИЕ СВОЙСТВА АСИНХРОННОГО ДВИГАТЕЛЯ. Привод является составной частью производственных машин и механизмов. Современный уровень развития электроники, обеспечивший производство недорогих, надежных, быстродействующих, простых в эксплуатации регулируемых электрических и механических преобразователей, датчиков сбора информации, сетевых устройств накопления, обработки и передачи информации, обеспечил внедрение и, практически, повсеместное применение управляемых автоматизированных приводов. В общем случае, структурная схема производственного комплекса с асинхронным электроприводом может быть представлена в виде: Системы управления, диагностики, и защиты Источник питания Коммутационная аппаратура Технологический процесс Сетевые средства обмена информацией Регулятор напряжения / преобразователь част. Асинхронный двигатель Редуктор Производственная машина, механизм Выпрямитель в цепи ротора Нерегулируемый привод Автоматизированный регулируемый привод Автоматизированный технологический комплекс Рис. 6.1 Обеспечение продолжительной и безаварийной работы технологического комплекса (с точки зрения электропривода), предполагает, что: I. производственные машины и механизмы должны снабжаться энергией (мощностью) в достаточном объеме для нормального пуска и протекания технологического процесса с учетом статических и динамических нагрузок, в соответствии с нагрузочной диаграммой; II. качество преобразования энергии должно соответствовать принятым энергетическим требованиям или превосходить их; 2 III. параметры механической мощности (момент и скорость вращения) должны соответствовать требованиям технологического процесса; IV. привод должен нормально функционировать в внешних условиях существующих или создаваемых при протекании технологического процесса (окружающая среда, режимы работы …) V.привод, при необходимости, должен обеспечивать качество динамических процессов, поддерживать обратную связь по технологическому параметру, обеспечивать обмен информацией с системой управления верхнего уровня. Под приводом далее рассматривается комплектный асинхронный электропривод в составе: трехфазного асинхронного электродвигателя с короткозамкнутым ротором; зубчатого или червячного редуктора; преобразователя частоты с неуправляемым выпрямителем и автономным инвертором напряжения, работающего по схеме широтно-импульсной модуляции. Корректный выбор и расчет электропривода и его составляющих возможен при задании статических и динамических нагрузок самого производственного механизма, определяемых статическими (механическая характеристика) и, динамическими характеристиками (режимы работы), необходимостью регулирования (числом параметров регулирования, качество переходного процесса, точность установки параметра регулирования). §α. Механические характеристики и режимы работы асинхронного двигателя Механическая характеристика асинхронного двигателя определяется зависимостью момента сопротивления на валу двигателя от скорости вращения вала при условии, что в каждой точке механической характеристики двигатель работает в установившемся режиме. Расчет механической характеристики производится по соотношению 5.2.8 (см. файл), связывающего величину электромагнитного момента и скольжения при заданных параметрах машины, напряжении и частоты питания. Скорость вращения ротора 6.1.1. Если механическая характеристика построена для номинальных значений напряжения и частоты то она называется естественной механической характеристикой. Наряду с механической характеристикой различают электромеханические характеристики, которые представляют собой зависимости токов статора и ротора, построенные по 5.2.5 и 5.2.6. Практический интерес представляет электромеханическая характеристика тока статора. На рис. 6.1.1 показаны типичные механическая и электромеханические характеристики асинхронного двигателя общепромышленного назначения. Из отношений 5.2.5, 5.2.6, 5.2.8 видно, что как величины моментов в характерных точках, так и форма механической характеристики зависят от параметров двигателя. В частности, повышение величины активного сопротивления 3 ротора, приводит к увеличению критического скольжения и повышению величины пускового момента. с e f Мв d I1 Mн M мин I2 b а sн s кр s, о.е. Рис. 6.1.1 Соответствующим подбором параметров двигателя можно реализовать огромное количество форм механической характеристики. Однако для практических применений в реальных приводах представляют интерес только те из них, которые соответствуют требования стандартизации и унификации производства. §β. Требования стандартизации и унификации Требования стандартизации и унификации реализуют идею минимизации затрат как, в частности, на производство и эксплуатацию асинхронных машин, таки уменьшения затрат на производство, передачу электрической энергии и ее преобразование в механическую энергию, в целом. Таким образом, стандартизация и унификация призваны найти компромисс между потребителем и производителем электрических двигателей. Каждый потребитель хочет иметь свой, специально спроектированный под его задачи, двигатель, который бы в полной мере удовлетворял его потребности. Каждый производитель хочет максимального сокращения номенклатуры выпускаемых изделий, минимизации затрат на обслуживание и ремонт. Компромисс достигается если, потребителю стандартизация обеспечивает возможность получения асинхронных машин с необходимыми механической и электромеханическими характеристиками, подключение к источникам электрической энергии, простое соединение с рабочими механизмами и возмож4 ностью замены, при выходе из строя, другой однотипной машиной, изготовленной другими производителями. У производителя асинхронных машин стандартизация обеспечивает высокую степень унификации, при выпуске большого разнообразия машин при минимальных отладках технологического оборудования и оснастки в условиях массового или крупносерийного производства. В максимальной степени изложенное распространяется на вид механической характеристики и величины моментов в характерных точках механической характеристики, обеспечивающих нормальный пуск и протекание технологического процесса с учетом статических и динамических нагрузок. Требования стандартизации и унификации регламентируют также: ряд номинальных мощностей; увязку ряда мощностей и установочно-присоединительных размеров; условия окружающей среды; способ монтажа; тип защиты; уровень шума; допустимые радиальные и осевые усилия на вал. §λ. Механические характеристики и режимы работы асинхронного двигателя (продолжение) На механической характеристике асинхронных двигателей общепромышленного применения присутствует ряд характерных точек. Точка а. Точка идеального холостого хода. Ротор двигателя вращается с синхронной скоростью, равной скорости вращения магнитного поля. ЭДС в электрических цепях ротора не наводится. Ток ротора равен нулю. Ток статора равен намагничивающему току, создающему магнитное поле. Режим работы идеального холостого хода соответствует схеме замещения с R2=0. Точка b. Точка номинального режима. Режим работы при котором обеспечиваются нормальные условия охлаждения, и следовательно, длительная безаварийная работа двигателя, при номинальном напряжении и частоте, номинальный режим, характеризуется величиной номинального момента Мн и s н . Стандартные асинхронные двигатели номинального скольжения проектируются таким образом что в этом режиме достигаются максимальные значения энергетических характеристик к.п.д. 6.3.1 и коэффициента мощности cos 1 рассчитываемого по 5.2.3. 1 В практических применениях, асинхронные двигатели, за редким исключением, длительно работают при нагрузках, не превышающих 85-90% от номинальной мощности (выбор двигателей осуществляется из стандартной дискретной шкалы мощностей). Поэтому для различных серий двигателей максимальные значения энергетических показателей могут достигаться и при скольжениях меньше номинальных. 5 1 Полная номинальная мощность двигателя равна 6.3.2 Номинальная активная мощность равна 6.3.3 Номинальная реактивная мощность равна 6.3.4 Значения параметров питания, механических и энергетических показателей относящихся к номинальному режиму составляют номинальные данные двигателя. Номинальные данные двигателя указываются на табличках паспортных и включают: число фаз, m частота тока, f1 фазное/линейное напряжение, U1 схема соединения фаз, Y / фазовый/линейный ток, I1 выходная мощность, P2 коэффициент мощности, cos скорость вращения выходного вала, n2 Участок характеристики b-c. На данном участке двигатель работает устойчиво. При нагрузке меньшей номинальной ток ротора и ток статора меньше номинальных значений. Двигатель по мощности не догружен, но с учетом примечания на предыдущей странице, именно здесь достигаются максимальные КПД и коэффициент мощности. Увеличение нагрузки выше номинальной приводит к перегрузке двигателя и допустимо только в ограниченном диапазоне. Асинхронные двигатели общепромышленного применения рассчитаны на напряжения питания 220-240/380-420 В и частоту 50 Гц. Допустимые отклонения напряжения питания, при котором гарантируется надежная работа двигателя в продолжительном режиме работы, составляет ±5%. Допустимые отклонения частоты сети составляет ±2%.Таким образом, стандартные асинхронные двигатели допускают некоторую перегрузку при номинальных значениях напряжения и частоты. При условии, что температура обмотки двигателя не превышает 10% от допустимого для данного класса нагревостойкости, эту перегрузку можно использовать при: работе от сети с отклонениями напряжения более чем на ±5%, но не более чем ±10%; температуре окружающей среды до 50° С2 с номинальной мощностью; 2 Если двигатель предназначен для работы в умеренном климате. 6 малых, периодических перегрузках по мощности; работе в продолжительном режиме, если расчетная потребляемая мощность превышает номинальную, но не более чем 5%. Допускаются кратковременные превышения нагрузки, броски моментов. Устойчивость работы двигателя на этом участке во многом определяется характером реагирования асинхронного двигателя на броски моментов рабочего механизма. При увеличении момента сопротивления на вале двигателя, скольжение увеличивается, скорость ротора уменьшается. При этом увеличивается ток ротора и электромагнитный момент, что обеспечивает снабжение рабочего механизма повышенным моментом. После исчезновения причины броска момента, происходит возврат в номинальный режим. Скорость реагирования и характер колебаний определяется крутизной участка b - c, степенью жесткостью механической характеристик: 2 * М кр sкр * с 6.3.5 где М кр , s кр - момент и скольжение в точке с. Степень жесткости механической характеристики зависит от мощности асинхронного двигателя. Из относительно малого значения активного сопротивления статора двигатели большей мощности имеют более крутой участок b – c. На рисунках 6.3.1 и 6.3.2 приведены механические характеристики двигателей мощностью 0,25 кВт и 75 кВт соответственно, построенных в относительных единицах. На рисунках 6.3.3 и 6.3.4 показаны расчетные кривые электромагнитного момента и тока статора, и скорости вращения асинхронного двигателя мощностью 250 Вт при двукратном от номинального броске момента сопротивления в течении 0,25 сек. На рисунках 6.3.5 и 6.3.6 показаны расчетные кривые электромагнитного момента и тока статора, и скорости вращения асинхронного двигателя мощностью 75 кВт при двукратном от номинального броске момента сопротивления в течении 0,25 сек. Чем больше жесткость механической характеристики, тем больше колебания момента и скорости. Поэтому двигатели, предназначенные для работы в приводах с пульсирующей нагрузкой, в повторно-кратковременном (S3) и перемежающемся (S6) режимах изготавливаются с повышенным скольжением. Обмотка ротора этих двигателей имеет повышенное активное сопротивление из-за применения сплавов с большим удельным сопротивлением. Как правило, технические данные модификации двигателей с повышенным скольжением приводятся для повторно кратковременного режима с продолжительностью включения 40% . Другим примером применения двигателей с повышенным скольжением, являются двухскоростные двигатели с переключением числа пар полюсов. Точка c. Точка критического момента. Характерной точкой на механической характеристике является точка максимального (критического) момента и соответствующее ей критическое скольжение. Если принять параметры двигателя постоянными, значение критического скольжения можно найти из уравнения: 6.3.6. 7 Рис. 6.3.1 Рис. 6.3.3 Рис. 6.3.5 Рис. 6.3.2 Рис. 6.3.4 Рис. 6.3.6 8 Скольжение, удовлетворяющее уравнению равно: 6.3.7 Если момент сопротивления превышает критический момент, двигатель остановится. При этом ток статора двигателя достигает значений тока короткого замыкания (пускового тока). Повторный пуск возможен только после снижения момента сопротивления нагрузки до значения момента, меньшего, чем пусковой момент на вале. Участок характеристики c-d. На данном участке устойчивая работа двигателя невозможна. Рис. 6.3.7 На этом участке происходят динамические процессы при пуске асинхронного двигателя (рис. 6.3.7). С точки зрения статической механической характеристики не устойчивость работы двигателя на данном участке объясняется тем, что при увеличении момента сопротивления нагрузки электромагнитный момент уменьшается и наоборот. То есть двигатель на этом участке или разгоняется или останавливается. Точка d. Точка начала пускового режима. Момент, развиваемый ротором и величины токов в режиме пуска, являются одними из важнейших характеристик двигателя, и должны соответствовать требованиям пуска всего привода в целом. Величина пускового момента равна (5.2.8 при s 1 ): 6.3.8 Величины токов при пуске стандартного асинхронного двигателя с короткозамкнутым ротором в 5÷7 раз превышают номинальные значения. Поскольку этот ток, для двигателей, предназначенных для работы в продолжительном режиме (S1), протекает по обмоткам незначительное время, то он не приводит к какому либо значительному превышению температуры двигателя. 9 Поэтому двигатели для работы в продолжительном режиме работы выбираются с учетом только статических нагрузок. Для приводов, работающих в кратковременном или повторнократковременных режимах, применяются специальные электродвигатели, спроектированные с учетом динамических нагрузок. В некоторых случаях, допустимо использование в кратковременном или повторно-кратковременном режимах работы двигателей, предназначенных для работы в продолжительном режиме с учетом термической, механической и тепловой перегрузок. Эффективным решением расширения границ применения двигателей, предназначенных для продолжительного режима, является использование независимой вентиляции. Пусковой момент в значительной степени определяется величиной активного сопротивления фазы ротора, которая в свою очередь зависит от формы и размеров пазов. Пазы ротора стандартных асинхронных двигателей с короткозамкнутым ротором выполняются таким образом, чтобы в момент пуска проявлялся так называемый эффект вытеснения тока, что приводит к увеличению пускового момента (точка f ) и появлению cедловой точки e. Если момент сопротивления на валу двигателя больше чем минимальный момент (Ммин), асинхронный двигатель не запуститься. Для усиления эффекта вытеснения тока и как следствие, повышения величины пускового момента и снижения пускового тока, обмотки роторов модификации двигателей с повышенным пусковым моментом выполняют с двойной беличьей клеткой. Такие двигатели применяются для привода рабочих механизмов, для которых характерны большие статические и инерционные нагрузки при пуске. Пусковые токи статора многократно превышающие номинальный ток, неблагоприятно влияют на сеть, питающую асинхронный двигатель, являясь причиной значительных падений напряжения. Это обстоятельство сказывается не только на самом запускаемом двигателе, но и на всех двигателях, получающих питание от данного участка сети. Поэтому пуск мощных асинхронных двигателей без применения специальных токоограничивающих средств, практически, недопустим. Ограничение пусковых токов асинхронных двигателей с короткозамкнутым ротором достигается применением активных или реактивных сопротивлений и дросселей насыщения, подключаемых последовательно к обмотке статора. Ограничение пусковых токов асинхронных двигателей с фазным ротором достигается ступенчатым регулированием пусковых сопротивлений, подключенных последовательно к обмотке ротора. Пуск асинхронных двигателей с ограничением пусковых токов и при пониженных пусковых моментах, возможен применением асинхронных электроприводов питаемых от электронных регуляторов напряжения. Пуск асинхронных двигателей с ограничением пусковых токов без понижения пускового момента, возможен применением асинхронных электроприводов с электронными преобразователями частоты, работающих в разомкнутом или замкнутом режиме. Для практических расчетов и исследований общих закономерностей, и зависимостей механических, электромеханических и энергетических характеристик 10 от параметров двигателя, напряжения и частоты сети, полученные в главе 5 соотношения несколько громоздки. Не теряя общности рассуждения и ограничив область применения, соотношения 5.2.5, 5.2.6, 5.2.8 можно упростить, если вынести намагничивающий контур в схеме замещения на вход напряжения питания. Такая “Г-образная”, в отличие от “Т-образной” схемы замещения, приведенной на рисунке 5.2.1, показана на рисунке 6.3.8. R1 jx S jxR I1 jE f I2 jX m R2 s Рис. 6.3.8 Ток ротора из схемы замещения равен: 6.3.9 Электромагнитный момент 6.3.10 Критическое скольжение как решение уравнения 6.3.6 6.3.11 Откуда критический момент 6.3.12 11 Выразив электромагнитный момент через величины критического момента и скольжения можно получить простую формулу для расчета и построения механической характеристики асинхронного двигателя, которая была предложена М. Клоссом: 6.3.13 Если в 6.3.13 принять активное сопротивление статора равным нулю получиться упрощенная формула Клосса, 6.3.14 которая давая погрешность при построении механической характеристики в 10-15% полезна тем, что механическая характеристика может быть построена по двум известным точкам М и s характеристики реального двигателя. Этими двумя точками могут быть номинальный и пусковой режимы, которые приводятся в каталогах. Приложение Основные технические данные, параметры схем замещения, механические и электромеханические характеристики асинхронных двигателей общепромышленного назначения мощностью от 120,00 Вт до 7,5 кВт. 12 Data Sheet NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com No.: MDS_N11032020_US 3 phase - motor Type : Output 63 S/4 : 0.16 0.12 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 0.88 / 0.44 A pf : 0.66 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1700 rpm Type of enclosure: IP 55 Design : F Service factor: Resistances [20°C] T1, T4: Standard: 1.15 48.7 Ohm Insul.Cl. 0.34 rpm 1800 f (Hz) Rating 60 no load 0.44 1700 60 full load 0.70 1640 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 0.68 460 0.88 460 1.41 and 0.44 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 45 dB(A) Efficiency: Insulation resistace : > 100 MOhm 52 % Starting current / Rated current: 2.45 Starting torque / Rated torque: 2.1 Breakdown torque / Rated torque: 2.2 08.12.2004 4 41 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urr ent vs. S peed 63S/ 4 230/ 460V -60 Hz 14,00 1,2 12,00 1 10,00 8,00 0,6 Current - I [A] Torque - T [lb-in] 0,8 6,00 0,4 4,00 0,2 2,00 0,00 0 0 200 400 600 800 1000 n [rpm] Date: 08.12.2004 T [lb-in] I [A ] 1200 1400 1600 1800 2000 No.: 11032020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N11532020_US 3 phase - motor Type : Output 63 L/4 : 0,25 0,18 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 1,12 / 0,56 A pf : 0,71 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1680 rpm Type of enclosure: IP 55 Design : E Service factor: Resistances [20°C] T1, T4: Standard: 1.15 32,9 Ohm Insul.Cl. 0,42 rpm 1800 f (Hz) Rating 60 no load 0,56 1680 60 full load 0,90 1310 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 0,84 460 1,12 460 1.80 and 0,56 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 41 dB(A) Efficiency: Insulation resistace : > 100 MOhm 57 % Starting current / Rated current: 2.75 Starting torque / Rated torque: 2.1 Breakdown torque / Rated torque: 2.2 08.12.2004 4 58 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. Speed 63L/ 4 230/ 460V -60 Hz 25,00 1,8 1,6 20,00 1,4 1,2 1 0,8 Current - I [A] Torque - T [lb-in] 15,00 10,00 0,6 0,4 5,00 0,2 0,00 0 0 200 400 600 800 1000 n [rpm] Date: 08.12.2004 T [lb-in] I [ A] 1200 1400 1600 1800 2000 No.: 11532020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N12132020_US 3 phase - motor Type : Output 71 S/4 : 0,33 0,25 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 1,56 / 0,78 A pf : 0,64 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1710 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 18,3 Ohm Insul.Cl. 0,56 rpm 1800 f (Hz) Rating 60 no load 0,78 1710 60 full load 1,25 1355 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 1,12 460 1,57 460 2.17 and 0,78 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 44 dB(A) Efficiency: Insulation resistace : > 100 MOhm 63 % Starting current / Rated current: 3.10 Starting torque / Rated torque: 2.5 Breakdown torque / Rated torque: 2.4 08.12.2004 4 62 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torqu e & C u rr ent vs. Speed 71S / 4 230/ 460V -60 Hz 35,00 3 30,00 2,5 25,00 20,00 1,5 Current - I [A] Torque - T [lb-in] 2 15,00 1 10,00 0,5 5,00 0,00 0 0 200 400 600 800 1000 n [rpm] Date: 08.12.2004 T [ lb-in] I [A ] 1200 1400 1600 1800 2000 No.: 12132020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N12632020_US 3 phase - motor Type : Output 71 L/4 : 0,50 0,37 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 1,90 / 0,95 A pf : 0,69 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1720 rpm Type of enclosure: IP 55 Design : F Service factor: Resistances [20°C] T1, T4: 13,65 Standard: 1.15 Ohm Insul.Cl. F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 1,48 460 1,90 460 3.04 and 0,95 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / 0,74 rpm 1800 0,95 1720 60 full load 1,52 1370 60 breakdown A during 1920 V , 5 sec. , 4 hours Winding Windungsprüfung test : : 690 V, 1 min. 44 dB(A) Efficiency: Insulation resistace : > 100 MOhm 71 % Starting current / Rated current: 3.55 Starting torque / Rated torque: 2.45 Breakdown torque / Rated torque: 2.60 08.12.2004 f (Hz) Rating 60 no load 82 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. Speed 71L/ 4 230/ 460V -60 Hz 50,00 4 45,00 3,5 40,00 3 35,00 2,5 25,00 2 Current - I [A] Torque - T [lb-in] 30,00 20,00 1,5 15,00 1 10,00 0,5 5,00 0,00 0 0 200 400 600 800 1000 1200 1400 1600 1800 2000 n [rpm ] T [ lb-in] Date: 08.12.2004 I [A] No.: 12632020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N13032020_US 3 phase - motor Type : Output 80 S/4 : 0,75 0,55 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 2,70 / 1,35 A pf : 0,71 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1710 rpm Type of enclosure: IP 55 Design : F Service factor: Resistances [20°C] T1, T4: Standard: 1.15 7,5 Ohm Insul.Cl. 0,98 rpm 1800 f (Hz) Rating 60 no load 1,35 1720 60 full load 2,16 1370 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 1,96 460 2,70 460 3.73 and 1,35 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 50 dB(A) Efficiency: Insulation resistace : > 100 MOhm 72 % Starting current / Rated current: 3.55 Starting torque / Rated torque: 2.2 Breakdown torque / Rated torque: 2.2 08.12.2004 4 72 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Tor qu e & C ur rent vs. Speed 80S / 4 230/ 460V -60 Hz 70,00 6 60,00 5 50,00 40,00 3 Current - I [A] Torque - T [lb-in] 4 30,00 2 20,00 1 10,00 0,00 0 0 200 400 600 800 1000 1200 1400 1600 1800 2000 n [rpm ] T [ lb-in] Date: 08.12.2004 I [A] No.: 13032020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N13532020_US 3 phase - motor Type : Output 80 L/4 : 1,00 0,75 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 3,66 / 1,83 A pf : 0,74 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1650 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 5,1 Ohm Insul.Cl. 1,45 rpm 1800 f (Hz) Rating 60 no load 1,83 1650 60 full load 2,92 1260 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 2,90 460 3,65 460 5.05 and 1,83 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 50 dB(A) Efficiency: Insulation resistace : > 100 MOhm 70 % Starting current / Rated current: 3.90 Starting torque / Rated torque: 2.2 Breakdown torque / Rated torque: 2.3 08.12.2004 4 75 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N14032020_US 3 phase - motor Type : Output 90 S/4 : 1,50 1,10 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 4,84 / 2,42 A pf : 0,78 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1660 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 3,14 Ohm Insul.Cl. 1,56 rpm 1800 f (Hz) Rating 60 no load 2,42 1660 60 full load 3,87 1275 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 3,12 460 4,84 460 6.69 and 2,42 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 50 dB(A) Efficiency: Insulation resistace : > 100 MOhm 73 % Starting current / Rated current: 4.45 Starting torque / Rated torque: 2.70 Breakdown torque / Rated torque: 2.60 08.12.2004 4 66,9 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. Speed 90S/ 4 230/ 460V -60 Hz 160,00 12 140,00 10 120,00 8 80,00 6 Current - I [A] Torque - T [lb-in] 100,00 60,00 4 40,00 2 20,00 0,00 0 0 500 1000 1500 2000 n [rpm ] T [ lb -in] Date: 08.12.2004 I [A] No.: 14032020 NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. Speed 80L/ 4 230/ 460V -60 Hz 100,00 8 90,00 7 80,00 6 70,00 5 50,00 4 Current - I [A] Torque - T [lb-in] 60,00 40,00 3 30,00 2 20,00 1 10,00 0,00 0 0 200 400 600 800 1000 1200 1400 1600 1800 2000 n [rpm ] T [lb-in] Date: 08.12.2004 I [A ] No.: 13532020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N14532020_US 3 phase - motor Type : Output 90 L/4 : 2,00 1,50 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 6,33 / 3,17 A pf : 0,8 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1660 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 2,19 Ohm Insul.Cl. 1,81 rpm 1800 f (Hz) Rating 60 no load 3,17 1660 60 full load 5,06 1275 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 3,62 460 6,33 460 8.76 and 3,17 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 50 dB(A) Efficiency: Insulation resistace : > 100 MOhm 74 % Starting current / Rated current: 4.65 Starting torque / Rated torque: 2.55 Breakdown torque / Rated torque: 2.50 08.12.2004 4 74,8 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. Speed 90L/ 4 230/ 460V -60 Hz 250,00 16 14 200,00 12 10 8 Current - I [A] Torque - T [lb-in] 150,00 100,00 6 4 50,00 2 0,00 0 0 500 1000 1500 2000 n [rpm ] T [lb-in] Date: 08.12.2004 I [A] No.: 14532020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N15032020_US 3 phase - motor Type : Output 100L/4 : 3,00 2,20 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 9,00 / 4,50 A pf : 0,81 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1705 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 1,45 Ohm Insul.Cl. 2,68 rpm 1800 f (Hz) Rating 60 no load 4,50 1705 60 full load 7,19 1348 60 breakdown F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 5,36 460 9,00 460 12.44 and 4,50 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / / / / / / / / / A during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 50 dB(A) Efficiency: Insulation resistace : > 100 MOhm 82 % Starting current / Rated current: 4.90 Starting torque / Rated torque: 2.30 Breakdown torque / Rated torque: 2.60 08.12.2004 4 69 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N15532020_US 3 phase - motor Type : Output 100L/40 : 5,00 3,70 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 15,24 / 7,62 A pf : 0,75 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1725 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 0,74 Ohm Insul.Cl. rpm 1800 f (Hz) Rating 60 no load F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 9,48 460 15,23 460 21.08 and 7,62 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / 4,74 / / / 7,62 / / / 12,19 / / A 60 full load 1380 60 breakdown 4 hours 77 K , at the stator winding, resistance method. 1920 V , 5 sec. , Winding Windungsprüfung test : : 690 V, 1 min. 55 dB(A) Insulation resistace : > 100 MOhm Efficiency: 81 % Starting current / Rated current: 5.1 Starting torque / Rated torque: 2.7 Breakdown torque / Rated torque: 3.1 08.12.2004 1725 during Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urr ent vs. S peed 100L/ 40 230/ 460V -60 Hz 600,00 45 40 500,00 35 30 25 300,00 20 200,00 Current - I [A] Torque - T [lb-in] 400,00 15 10 100,00 5 0,00 0 0 500 1000 1500 2000 n [rpm ] T [lb-in] Date: 08.12.2004 I [A ] No.: 15532020 NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. Speed 100L/ 4 230/ 460V -60 Hz 300,00 25 250,00 20 200,00 Current - I [A] Torque - T [lb-in] 15 150,00 10 100,00 5 50,00 0,00 0 0 500 1000 1500 2000 n [rpm] T [lb-in] Date: 08.12.2004 I [A] No.: 15032020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N16332020_US 3 phase - motor Type : Output 132S/4 : 7,50 5,50 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 19,80 / 9,90 A pf : 0,82 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1735 rpm Type of enclosure: IP 55 Design : G Service factor: Resistances [20°C] T1, T4: Standard: 1.15 0,44 Ohm Insul.Cl. rpm 1800 f (Hz) Rating 60 no load F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 9,06 460 19,81 460 27.42 and 9,90 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / 4,53 / / / 9,90 / / / 15,85 / / A 1735 60 full load 1395 60 breakdown during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 62 dB(A) Efficiency: Insulation resistace : > 100 MOhm 86 % Starting current / Rated current: 5.45 Starting torque / Rated torque: 2.45 Breakdown torque / Rated torque: 2.75 08.12.2004 4 67 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torque & C urrent vs. S peed 132S/ 4 230/ 460V -60 Hz 800,00 60 700,00 50 600,00 40 400,00 30 Current - I [A] Torque - T [lb-in] 500,00 300,00 20 200,00 10 100,00 0,00 0 0 500 1000 1500 2000 n [rpm ] T [ lb-in] Date: 08.12.2004 I [A] No.: 16332020 NORD Gear Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Data Sheet No.: MDS_N16632020_US 3 phase - motor Type : Output 132M/4 : 10,00 7,50 hp kW Connection of stator : Voltage: 230 / 460 V Frequency : Current : 25,80 / 12,90 A pf : 0,84 Duty: Direction of rotation : Code Letter: Cont both 60 Hz Speed : 1735 rpm Type of enclosure: IP 55 Design : H Service factor: Resistances [20°C] T1, T4: Standard: 1.15 0,24 Ohm Insul.Cl. rpm 1800 f (Hz) Rating 60 no load F NEMA, EN 60034 LR112560 E191510 Measurement-values: U(V) 230 / / / 230 / / / 230 / / / Type-or460 V heat-run-test at: 460 I (A) 12,10 460 25,81 460 35.72 and 12,90 Temperatur rise above ambient temp. : Winding test : Noise level, LpA / 6,07 / / / 12,90 / / / 20,65 / / A 1735 60 full load 1395 60 breakdown during 1920 V , 5 sec. , hours Winding Windungsprüfung test : : 690 V, 1 min. 62 dB(A) Efficiency: Insulation resistace : > 100 MOhm 87 % Starting current / Rated current: 6.45 Starting torque / Rated torque: 2.90 Breakdown torque / Rated torque: 08.12.2004 4 70 K , at the stator winding, resistance method. Overload : nominal current x 1,6 - 120 s Date : YY/Y 3.2 Signature : NORD GEAR Corp. 800 NORD Drive Waunakee, WI 53597 www.nord.com Torqu e & C u rrent vs. Speed 132M / 4 230/ 460V -60 Hz 1400,00 90 80 1200,00 70 1000,00 800,00 50 40 600,00 Current - I [A] Torque - T [lb-in] 60 30 400,00 20 200,00 10 0,00 0 0 500 1000 1500 2000 n [rpm] T [lb-in] Date: 08.12.2004 I [ A] No.: 16632020