Лекция 9 Раздел 2: МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЛИНЕЙНЫХ
реклама

Лекция 9
Раздел 2: МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
Тема 2.3: ГРАФИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
Тема лекции: ЧАСТОТНАЯ ХАРАКТЕРИСТИКА СИСТЕМЫ
План лекции:
1.
2.
3.
4.
Понятие о частотной характеристике динамического звена системы.
Комплексный коэффициент передачи системы. Годограф.
Виды частотных характеристик.
Экспериментальное определение частотной характеристики линейного
динамического звена.
5. Получение частотной характеристики с помощью функции Matlab.
Литература:
[1] Дядик В.Ф. Теория автоматического управления: учебное пособие/ В.Ф. Дядик, С.А.
Байдали, Н.С. Криницын; Национальный исследовательский Томский политехнический
университет. − Томск: Изд-во Томского политехнического университета, 2011. – 196 с.
[2] Ричард К. Дорф Современные системы управления. - М.: Лаборатория Базовых
Знаний, 2004 - 702 с.: ил.
[3] Филлипс Ч., Харбор Р. Системы управления с обратной связью. - М.: Лаборатория
Базовых Знаний, 2001 - 616 с.: ил.
[4] Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. Санкт-Петербург: изд. "Профессия", 2003 - 749 с.: ил.
ПОНЯТИЕ О ЧАСТОТНОЙ ХАРАКТЕРИСТИКЕ ДИНАМИЧЕСКОГО ЗВЕНА СИСТЕМЫ
Важную роль при описании линейных стационарных систем играют ЧАСТОТНЫЕ
ХАРАКТЕРИСТИКИ. Если на вход линейной системы автоматического управления (далее
САУ) подать СИНУСОИДАЛЬНОЕ (гармоническое) ВОЗДЕЙСТВИЕ , то по истечении некоторого
времени, когда затухнут все движения, определяемые переходными процессами внутри
САУ, на выходе системы установится также гармоническое изменение выходной величины
с той же частотой, которую имеет входная величина, но с иными амплитудами и фазой
(рис.1). Эти величины при прочих равных условиях, будут зависеть от частоты
возмущающего воздействия. Такие зависимости называют ЧАСТОТНЫМИ ХАРАКТЕРИСТИКАМИ
САУ. По частотным характеристикам можно судить о ДИНАМИЧЕСКИХ СВОЙСТВАХ САУ.
Рис.1.
ЧАСТОТНОЙ ХАРАКТЕРИСТИКОЙ ДИНАМИЧЕСКОГО ЗВЕНА называют функцию комплексного
аргумента jω (ЧАСТОТНУЮ ФУНКЦИЮ), полученную путем формальной замены s на jω в
выражении передаточной функции
Периодическое гармоническое воздействие на объект
комплексной показательной форме (векторной форме) как
может
быть
записано
в
в
где Х – амплитуда колебания входного воздействия (А1),
j = √-1,
– угловая частота,
- единичный вектор.
После затухания собственных колебаний в САУ на
периодические колебания, определяемые выражением вида:
ее
выходе
установятся
где
Y — амплитуда колебания выходной величины (А2),
φ — фазовый сдвиг выходного сигнала относительно входного (разность фаз
выходного и входного колебаний).
Как действительные, так и (комплексное) векторное
входных и выходных сигналов САУ показано на рис. 2.
представление
соотношения
Рис. 2.
КОМПЛЕКСНЫЙ КОЭФФИЦИЕНТ ПЕРЕДАЧИ ЗВЕНА (СИСТЕМЫ). ГОДОГРАФ
Разделим выходную величину звена на величину входного воздействия и получим
выражение ЧАСТОТНОЙ ФУНКЦИИ:
W(jω)=
где К(ω) – МОДУЛЬ (отношение амплитуд выходного и входного колебаний) ЧАСТОТНОЙ
ФУНКЦИИ, который называется КОМПЛЕКСНЫЙ КОЭФФИЦИЕНТ ПЕРЕДАЧИ ЗВЕНА (СИСТЕМЫ):
К(ω) = Y/X = А2/А1
φ — АРГУМЕНТ ЧАСТОТНОЙ ФУНКЦИИ (разность фаз выходного и входного колебаний
φ2-φ1, сдвиг фаз).
ВЫВОД:
1. Частотная передаточная функция получается из обычной заменой оператора
Лапласа s на комплексную частоту jω, т.е. в результате перехода от
изображения Лапласа к изображению Фурье.
2. Если дифференциальные уравнения движения системы связывает входной и выходной
сигналы (т.е. функции времени), а передаточная функция связывает изображения
Лапласа тех же сигналов, то частотная передаточная функция связывает их
спектры.
Модуль частотной функции, т.е. комплексный коэффициент передачи, и ее аргумент φ
зависят от угловой частоты входного сигнала. Модуль и аргумент могут быть
представлены вектором и углом вектора на комплексной плоскости, как это показано на
рис. 3. При непрерывном изменении частоты происходит изменение положения вектора
частотной функции, сопровождающееся изменением ее модуля (комплексного коэффициента
передачи) и аргумента. Конец вектора описывает на комплексной плоскости некоторую
кривую, называемую годографом.
Рис.3.
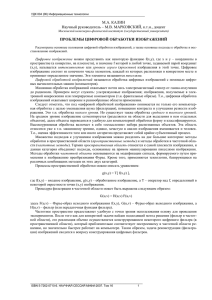
ГОДОГРАФ — это геометрическое место точек конца вектора частотной функции на
комплексной плоскости при изменении частоты от 0 до ∞ (рис.4, а). Значения частот
откладываются непосредственно на годографе, который является АМПЛИТУДНО-ФАЗОВОЙ
ЧАСТОТНОЙ ХАРАКТЕРИСТИКОЙ СИСТЕМЫ (АФЧХ или АФХ).
Рис.4.
ВИДЫ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
В теории автоматического управления рассматривают
основные частотные характеристики динамических звеньев:
и
используют
следующие
1. АМПЛИТУДНО-ЧАСТОТНАЯ ХАРАКТЕРИСТИКА (АЧХ) –
, где P(ω) и Q(ω) — соответственно вещественная
(или действительная) и мнимая части частотной функции W(jω). АЧХ звена (или системы
в целом) показывает зависимость модуля частотной функции от частоты подаваемых
колебаний, т.е. зависимость отношения амплитуд входного и выходного колебаний
(А2/А1) от частоты подаваемых колебаний ω.
2. ФАЗО-ЧАСТОТНАЯ ХАРАКТЕРИСТИКА (ФЧХ) –
. ФЧХ звена (или системы в целом) показывает зависимость
аргумента частотной функции от частоты подаваемых колебаний, т.е. зависимость
сдвига фаз между входным и выходным колебаниями (φ2-φ1) от частоты подаваемых
колебаний ω.
3. АМПЛИТУДНО-ФАЗОВАЯ ЧАСТОТНАЯ ХАРАКТЕРИСТИКА (АФЧХ), которая определяется как
годограф (след движения конца) вектора
плоскости при изменении частоты от 0 до
, построенный на комплексной
. АФЧХ совмещает в себе АЧХ и ФЧХ.
На рис. 4 показаны частотные характеристики некоторого динамического звена.
Для определения модуля и аргумента частотной функции на заданной частоте следует
соответствующую точку годографа соединить прямой с началом координат. Длина
полученного
отрезка
соответствует
модулю
частотной
функции
(комплексному
коэффициенту передачи). Угол, образованной полученной прямой с положительной
вещественной
осью,
является
аргументом
частотной
функции
(рис.4).
Такое
представление частотной характеристики САУ достаточно наглядно, но не позволяет
просто получать количественные характеристики для сравнения разных систем.
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ ЛИНЕЙНОГО ДИНАМИЧЕСКОГО
ЗВЕНА
Алгоритм
экспериментального
определения
частотной
характеристики
линейного
динамического звена, объекта или системы управления для конкретной частоты
1. Подать
на
вход
объекта
синусоидальный
сигнал
частоты
и
:
постоянной
амплитуды.
2. Дождаться затухания свободной составляющей переходного процесса.
3. Измерить амплитуду выходного сигнала и сдвиг его по фазе относительно
входного сигнала.
4. Отношение амплитуды выходного установившегося сигнала к амплитуде входного
сигнала определит модуль частотной характеристики при частоте
.
5. Сдвиг фазы выходного сигнала относительно входного сигнала определит угол
(аргумент) частотной характеристики при частоте
.
Применяя
данный
алгоритм
для частот
от нуля до бесконечности,
можно
экспериментальным путем определить частотную характеристику конкретного устройства.
Функциональная схема экспериментальной установки для снятия частотных характеристик
имеет вид на рис.5.
При
частоте
на
экране
осциллографа
составляющей следующую картину на рис.6.
получаем
после
затухания
свободной
Рис. 6.
На основании
рис.
6 можно
построить
на комплексной
плоскости
точку,
принадлежащую частотной характеристике устройства, а совокупность точек при
изменении частоты от нуля до величины, когда амплитуда выходного установившегося
сигнала станет пренебрежимо мала, будет представлять собой амплитудно-фазовую
частотную характеристику (АФЧХ). Как видно из рисунка, по этим данным может быть
построена любая необходимая частотная характеристика устройства.
Рис.7.
Для экспериментального получения частотных характеристик различных объектов в
инженерной практике используют специализированные приборы, а в последнее время
широко
используют
для
таких
целей
персональные
компьютеры,
оснащенные
специализированными платами ввода-вывода и пакетами прикладных программ.
Учитывая все вышеизложенное, становится ясным и ФИЗИЧЕСКИЙ СМЫСЛ ЧАСТОТНОЙ
ХАРАКТЕРИСТИКИ: она показывает, во сколько раз изменяет динамическое звено
(устройство), работающее в установившемся режиме, амплитуду входной синусоиды с
частотой
, и на какой угол сдвигает входную синусоиду по фазе.
ПОЛУЧЕНИЕ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ С ПОМОЩЬЮ ФУНКЦИИ MATLAB
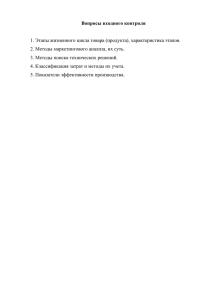
Для построения АЧХ звена (системы) в Matlab ипсользуют функции freqs, abs и plot
(см. рис.8). Функкция
freqs позволяет записать передаточную функцию звена в
комплексном виде и тем самым получить комплексную передаточную функцию W(jw).
Функция abs выделяет модуль │W(jw)│ и тем самым дает выражение АЧХ звена. Функция
plot строит график АЧХ.
Пример:
>>
>>
>>
>>
w=logspace(-1,1);
num=[1];
den=[1 1];
sys=tf(num,den)
Transfer function:
1
----s + 1
>>
>>
>>
>>
>>
>>
sysjomega=freqs(num,den,w);
sysmag=abs(sysjomega);
plot(w,sysmag), grid on
title('Frequency G(jw)')
xlabel('w')
ylabel('G(jw)')
Рис.8. АЧХ для апериодического звена первого порядка.
Функция nyquist позволяет построить на комплексной плоскости АФЧХ системы (в
диапазоне частот от -∞ до +∞), если задана ее передаточная функция. Пример
построения АФЧХ в Matlab для системы, представленной передаточной функцией
G(s) =
1
, на рис.9.
s + 10 s + 100
2
Рис.5. Годограф АФЧХ системы.