УДК 656.11 Методика оценки распределения транспортных
реклама

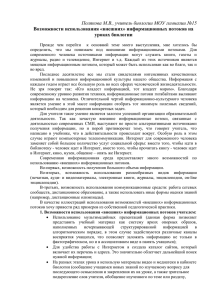
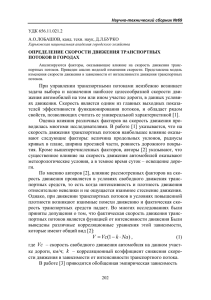
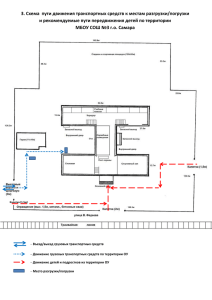
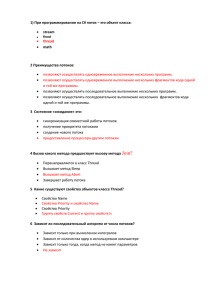
УДК 656.11 Методика оценки распределения транспортных потоков на пересечениях с использованием детекторов транспорта Estimation origin-destination traffic flows on intersections using transport detectors Лагерев Р.Ю (Lagerev R.U), доцент кафедры «Менеджмент на АТ» НИ Иркутский государственный технический университет Зедгенизов А.В (Zedgenizov A.V.), доцент кафедры «Менеджмент на АТ» НИ Иркутский государственный технический университет В статье рассмотрен метод построения картограмм транспортных потоков на пересечениях УДC с использованием только данных значений въезжающих и убывающих с перекрёстка потоков, сведенный к комбинаторной задаче, реализуемой генетическими алгоритмами. Peak-hour turning movement counts or forecasts are the best source of information on turning movements. In the absence of such information, turning movements can be estimated from approach and departure volumes for each leg of the intersection. При проектировании организации дорожного движения на пересечениях в первую очередь необходимы данные, характеризующие величину и направления транспортных потоко. Как известно, такая информация наглядно представляется картограммами транспортных или пешеходных потоков и является основной информацией характеризующей нагрузку на перекресток, более точная формулировка – характеризует значения пиковой интенсивности по каждому направлению движения транспортных средств (рис. 1). Рис 1 – Варианты графического представления картограмм транспортных потоков Многолетний зарубежный и отечественный опыт специалистов позволяет выделить картограммы транспортных потоков к наиболее объективным показателям нагрузки на улично-дорожную сеть. По мере совершенствования аппаратуры для исследования транспортных потоков, используемых в организации дорожного движения, продолжают развиваться и методики их оценки. Одна из последних методик – оценка картограмм транспортных потоков на пересечениях с использованием детекторов транспорта представлена в американском руководстве НСM 2000 «Chapter 10 Urban Street Concepts». В основу методики заложено решение классической задачи определения O-D матриц, широко используемой в качестве исходных данных в программах микро и макро моделирования транспортных потоков (рис. 1, табл. 1). Рис 2 – Задача определения корреспондирующих потоков на пересечении Таблица 1 – Общий вид O-D матрицы D1 D2 D3 D4 O1 0 T ij T ij T ij O2 T ij 0 T ij T ij O3 T ij T ij 0 T ij O4 T ij T ij T ij 0 Рассматриваемая методика построения картограмм транспортных потоков предполагает, что количество транспортных средств, убывающих с одного подхода в направлении другого (значение O-D пары) прямо пропорционально величине суммарного прибывающего или убывающего потока. T ij = Ti ⋅ T j , ∑ Tij i (1) где T ij – величина корреспондирующего транспортного потока, следующего от i-го подхода к j-му выезду; T i – суммарный прибывающий транспортный поток к i-му подходу; T j – суммарный убывающий поток от j-го выезда. Разворачивающиеся на перекрестке транспортные потоки принимаются равными нулю (см. табл. 1). Отмечается, что выражение 1 не гарантирует выполнения баланса по суммам, в этой связи значения T ij выравнивают в большую, либо меньшую сторону с учетом поправочных коэффициентов. Таким образом, методика НСМ 2000 аналогична классической гравитационной модели, используемой советскими градостроителями еще в 70 годах прошлого столетия. В зарубежной практике большое количество исследований базируется на использовании периферийного оборудования (детекторов), позволяющего собирать подробные данные об интенсивности движения, в том числе в режиме реального времени. В нашей стране преобладают ручные методы получения исходной информации (подсчет интенсивности движения). В условиях плотного транспортного движения выполнять обследования с целью построения картограмм интенсивности движения практически невозможно, кроме того, на современном этапе развития ITS необходимы данные о существующем распределении транспортных поток, получаемые в режиме on-line. Поэтому авторы настоящей статьи задались целью сравнить метод, предложенный в руководстве НСМ 2000 (гравитационная модель) с методом наименьших квадратов, реализуемый на основе генетических алгоритмов (GA). Анализ зарубежных и отечественных работ позволяет утверждать, что большое количество задач связанных с оптимизацией плана работы светофорных объектов представляют собой вид комбинаторных задач, которые решаются путем проверки всех возможных вариантов (полным перебором). В такой ситуации возникла необходимость разработки новых алгоритмов оптимизации. В последнее годы в задачах оптимизации технических систем широкое распространение стали получать именно алгоритмы GA. В настоящее время генетические алгоритмы применяются при разработке программного обеспечения, в системах искусственного интеллекта, оптимизации, искусственных нейронных сетях и других отраслях знаний. Следует отметить, что с их помощью решаются задачи, для которых раньше использовались только нейронные сети. Поэтому на современном этапе развития GA выступают в роли независимых от нейронных сетей алгоритмов оптимизации. Примером может послужить задача коммивояжера, изначально решавшаяся при помощи сети Холфилда. Генетические алгоритмы могут поддерживать нейронные сети или наоборот, либо оба метода взаимодействуют в рамках гибридной системы, предназначенной для решения конкретной задачи. Генетиче- ские алгоритмы также применяются совместно с нечеткими системами. В последнее время, учитывая отмеченные выше преимущества, GA применяются для решения широкого класса задач направленных на оптимизацию функционирования различных транспортных систем. Применительно к задачам организации дорожного движения, GA получили широкое применение в оптимизации работы светофорных объектов, обслуживающих наиболее загруженные транспортные магистрали (Hadi and Wallace, 1993; Memon and Bullen, 1996; Lo et al., 2000), а также для оценки транспортного спроса на сетях городских магистралей (Reddy and Chakroborty, 1999), кроме того, алгоритмы GA заложили в последнюю версию программы Transyt-7F. Основные отличительные признаки классических алгоритмов оптимизации от генетических, представлены в таблице 2. Таблица 2 – Сравнение инструментов оптимизации Классические алгоритмы Генетические алгоритмы Генерируют единственную точку на Генерирует популяцию точек на каждой итерации. Последователь- каждой итерации. Лучшая точка в ность точек достигает оптимально- популяции достигает оптимальго решения. ного решения. Выбирают следующую точку в по- Выбирают следующую популяследовательности путем детерми- цию на основе вычислений гененированных вычислений ратора случайных чисел На начальном этапе, для проверки работоспособности генетического алгоритма авторы использовали функция Растригинга (рис. 3): (2) y = 20 + x12 + x22 − 10 ⋅ (cos 2πx1 + cos 2πx2 ) Рис 3 – Графическое представление функции Растригинга Функция Растригинга интересна тем, что имеет множество локальных минимумов все они больше нуля, но при этом имеется единственный глобальный минимум в точке (0, 0). Надо отметить эта функция часто используется для оценки работы различных алгоритмов оптимизации, поскольку множество локальных минимумов усложняют задачу поиска решения для классических алгоритмов оптимизации. На следующем рисунке показана плотность чередования локальных минимумов (рис.4). Рис. 4– Локальные минимумы функции Растригинга На первом этапе основной задачей является определение минимума рассматриваемой функции с использованием генетического алгоритма оптимизации без ограничений, накладываемых на оцениваемые переменные x 1 и x 2 (табл. 3). Таблица 3 – Тестирование GA без ограничений Номер Значение Значение Значение Число эксперимента ФП x1 x2 итераций 1 0,05531 0,001 -0,017 53 2 0,0272 -0,01 0,005 60 3 1,0034 0,002 -1,001 51 4 0,05531 0,001 -0,017 53 5 0,0272 -0,01 0,005 60 6 0,0063 0,005 -0,003 50 7 0,0694 0,003 -0,018 51 8 0,2944 0,025 0,03 51 9 2,9689 0 -0,001 59 10 0,0166 0,005 -0,008 59 В целом результаты первого эксперимента, потвердели эффективность использования GA в многовыпуклых задачах – значения оцениваемых переменных x 1 и x 2 фактически достигли глобального минимума (рис. 5). Best: 0.11012 Mean: 5.4475 25 Лучшая приспосабливаемость Средняя приспосабливаемость Значение ЦФ 20 15 10 5 0 0 10 20 30 40 50 Итерация 60 70 80 90 100 Рис. 5 – График сходимости функции приспособленности (ЦФ) функции Растригинга (в линейном масштабе) В нижней части рисунка 5 отображена наилучшая сходимость целевой функции. Значения параметров отображают среднюю ее схо- димость для каждого поколения (итерации). Для того, чтобы более подробно проанализировать сходимость целевой функции, изменим масштаб оси «y» c линейного на логарифмический (рисунок 6). Best: 0.11012 Mean: 5.4475 Значение ЦФ 10 10 Лучшая приспосабливаемость Средняя приспосабливаемость 1 0 0 10 20 30 40 50 Итерация 60 70 80 90 100 Рис. 6 – График сходимости функции приспособленности Растригинга (в логарифмическом масштабе) Анализируя данные представленные на рис. 6, убеждаемся в том, что в генетическом алгоритме скорость сходимости тем выше, чем ниже уровень поколения, и наоборот, сходимость значительно замедляется при достижении оптимума функции приспособленности. Рассмотрим решение задачи оценки O-D матриц транспортных потоков на пересечении на примере искусственных данных (картограмма транспортных потоков задана) в виде следующего эксперимента: по значениям картограммы транспортных потоков определим суммарные значения прибывающих и убывающих потоков, по которым с помощью метода наименьших квадратов, реализуемого в GA восстановим заданную картограмму, другими словами, решим обратную задачу и сравним оценки значений картограммы с точными значениями. Это позволит провести анализ точности и пригодности методов к рассматриваемой задаче. Для пересечения, представленного на рис. 2., система содержит 12 неизвестных и 8 ограничений (см. табл. 1) и представляет собой классическую транспортную задачу. Функция приспособленности со значениями потоков представленных в таблице 4 имеет следующий вид: min(f)=(1120-x(1)-x(2)-x(3))^2+(1790-x(4)x(5)-x(6))^2+(890-x(7)-x(8)-x(9))^2+(1315-x(10)x(11)-x(12))^2+…+ (1485-x(5)-x(7)-x(12))^2+(1455-x(2)-x(9)x(10))^2+(1305-x(3)-x(4)-x(11))^2++(870-x(1)-x(6)x(8))^2. При линейных ограничениях: Aeq*X=Beq, где Aeq – булева матрица, X=T ij , beq=T i (T j ) (см. формулу 1). Необходимо сразу отметить, что методы регрессионного анализа, использующие нормальные уравнения, в данном случае оказываются непригодными. Для реализации GA предложено использовать специальное приложение Optimization Toolbox пакета Matlab. Качество оценки потоков с использованием GA представлены в табличном (табл.4) и графическом (рис. 7) виде. Таблица 4. – Искусственные данные и оценка сходимости потоков Западный Восточный Южный Северный Прибыло Oi 1120 1790 890 1315 Убыло Dj 1485 1455 870 1305 Подход Направления Кодированное значение направл. x1 x2 x3 x4 x5 x6 x7 x8 x9 x10 x11 x12 OD пары О1D 2 O1D 3 O1D 4 O3D 4 O3D 1 O3D 2 O4D 1 O4D 2 O4D 3 O2D 3 O2D 4 O2D 1 Заданный поток, авт. 130 865 125 345 124 5 200 125 540 225 365 835 115 Вероятность 0,12 0,77 0,11 0,19 0,70 0,11 0,14 0,61 0,25 0,28 0,63 0,09 HCM 2000 248 526 346 609 743 438 314 185 391 535 351 429 GA-1 77 935 108 382 593 815 351 413 127 394 380 541 GA-2 288 741 91 473 629 688 416 329 145 569 306 441 GA-3 222 370 528 236 766 788 281 295 314 770 106 438 GA-4 467 GA-5 150 597 845 56 125 651 514 625 283 213 395 463 163 689 327 124 5 218 100 502 287 323 853 140 900 1000 1100 1200 900 1000 1100 1200 Оценки HCM Анализ данных таблицы 4 подтверждает наличие больших расхождений между оценками HCM 2000 и реальными значениями. (рис.6). Аналогичные рассуждения можно провести относительно генетического алгоритма – его оценки также не совпадают с действительными значениями интенсивности движения (см. GA-1,..,4). 600 R2=0.20 400 200 200 300 400 500 600 700 800 Точные значения Оценки HCM Ошибки сходимости 200 0 -200 200 300 400 500 600 700 800 Точные значения Рис. 6 – Анализ сходимости точных значений интенсивности движения с оценками HCM 2000 Для повышения качества работы необходимы какие-либо априорные сведения, способствующие повышению качества сходимости. В качестве таких данных можно, например, указать точное значение хотя бы одного потока (x5), и назначить диапазон возможных изменений значений корреспондирующих потоков, что значительно повышает качество оценки (рис.7). Оценка GA 1200 1000 800 R2=0,99 x vs. xrl fit 1 600 400 200 200 300 400 500 600 700 800 900 1000 1100 1200 Точные значения Оценка GA 60 fit 1 40 20 0 -20 -40 -60 200 300 400 500 600 700 800 900 1000 1100 1200 Точные значения Рис. 7 – Анализ сходимости точных значений интенсивности движения с оценками GA Необходимо отметить, что в методике, предлагаемой в HCM 2000, вообще не рассматривается качество исходных данных. Заранее предполагается, что исходные данные (входящие и выходящие с перекрестка потоки) не имеют ошибки замеров, другими словами рассматривается закрытая система.Аналогичные требования предъявляет гравитационная модель. Однако в практике, даже при использовании периферийного оборудования для сбора характеристик транспортного потока возникают ошибки. В этой связи использование методики изложенной в НСM 2000 для построения картограмм интенсивности движения требует предварительного уравнивания данных и не позволяет использовать ее в случае грубых невязок, в то время как генетические алгоритмы, не чувствительны к возникающим ошибкам в исходных данных и вполне могут применяться для «уравнивания» и построения картограмм транспортных потоков. Список литературы 1. Клинковштейн Г.И. Организация дорожного движения. М.: Транспорт, 1975. 192 с. 2. 3. 4. 5. 6. 7. 8. Михайлов А.Ю., И.М. Головных. Современные тенденции проектирования и реконструкции улично-дорожных сетей. – Новосибирск: Наука, 2004.-266 с. Nihan, N. L., and G. A. Davis. Recursive Estimation of OriginDestination Matrices from Input/Output Counts //Transportation Research-B, 1987.–Vol. 21B. – N2. –P. 149–163. Lam W.H.K., Lo H.P., Zhang N. Estimation of an origin-destination matrix with random link choice proportions: a statistical approach //Transportation Rese., 1996. – 30B. – P. 309-324. Cascetta, E., and S. Nguyen. A Unified Framework for Estimating or Updating Origin/Destination Matrices from Traffic Counts //Transportation Research B, 1988. – Vol. 22B. – N6. –P. 437–455. Park, B., C.J. Messer, and T. Urbanik. "Traffic Signal Optimization Program for Over-Saturated Conditions, Genetic Algorithm Approach." Transportation Research Record 1683, pp. 133-142, Transportation Research Board, Washington, DC, 1999. T. Back (1996). Evolutionary Algorithms in Theory and Practice: Evolution Strategies,Evolutionary Programming, Genetic Algorithms. Oxford: Oxford University Press. D. E. Goldberg (1989). Genetic algorithms in search, optimization, and machine learning. Reading, MA: Addison-Wesley.