нетрадиционные рассуждения о существовании механизма
реклама

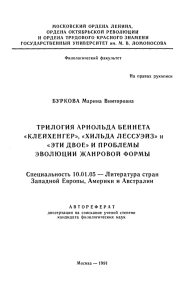
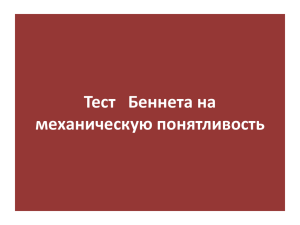
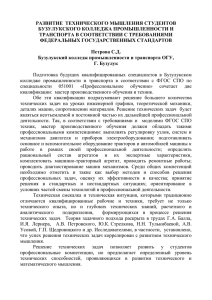
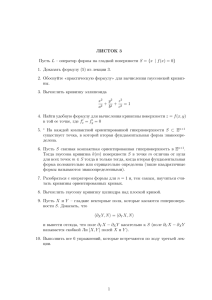
Нетрадиционные рассуждения о существовании механизма Беннета УДК 621.01 Л.Т. ДВОРНИКОВ НЕТРАДИЦИОННЫЕ РАССУЖДЕНИЯ О СУЩЕСТВОВАНИИ МЕХАНИЗМА БЕННЕТА В 1903 г. Беннет (G. Bennett) на двух страницах журнала «Engineering», изданного в Лондоне, сообщил в статье «A new mechanism» [1] о возможности создания подвижного пространственного шарнирного четырёхзвенника. Пространственный четырёхзвенник Беннета в виде замкнутой кинематической цепи показан на рис. 1. B D A C Рис. 1. Кинематическая цепь механизма Беннета В этой цепи геометрические оси вращательных кинематических пар A, B, C и D не параллельны и не пересекаются между собой; противоположные звенья AB-DC и BC-AD одинаковы по длине; геометрические оси противоположных кинематических пар развёрнуты друг относительно друга на равные углы α и β; при этом, удовлетворяется пропорция: ΑΒ(DC) BC(AD) . sin α sin β Позже о перечисленных выше геометрических особенностях «косого» (skew) механизма более подробно сообщил Беннет в публикации [2] в 1914г. Сообщение Беннета не осталось незамеченным, так как описанный в нём механизм представлялся на уровне невозможного. Именно поэтому объявленная конструкция механизма вызвала большой интерес среди учёных. Если можно так выразиться, появилась целая «беннетиана» из попыток исследовать феномен и объяснить его. В советской научной литературе механизм Беннета более или менее подробно рассматривался в монографиях проф. П.А. Лебедева [3], 1966 года издания и проф. Ф.М. Диментберга [4], 1982 года издания. В них, в частности, анализировались отклики на механизм Беннета, опубликованные Р. Брикаром (1906 г. и 1924 г.), М.Д' Оканем (1918 г.), Э. Делассю (1921 г.), Ф. Мийяром (1931 г.), Г. Еггером (1936 г.), Н.Г.Бруевичем (1937 г.), С.С. Бюшгенсом (1939 г.), Ф.М. Диментбергом и Я.Б. Шором (1940 г.), М. Гольдбергом (1943 г.), Ю.И. Барминым (1961 г.). Это далеко не полный перечень имён учёных, интересовавшихся механизмом Беннета. В основном, во всех этих исследованиях проверялась справедливость и достаточность сформулированных Беннетом четырех записанных выше условий подвижности четырёхзвенника. Отметим, что в статье Ю.И. Бармина было доказано, что из перечисленных условий достаточно обеспечить два, чтобы механизм функционировал, а остальные оказываются следствием двух первых. Нельзя не отметить особый вклад в разработку этой темы, внесённый А.В. Верховским в статье [5], опубликованной в г. Томске в 1925г., где им было дано аналитическое доказательство работоспособности двух отличающихся друг от друга пространственных четырёхзвенников – прямого и перекрёстного. Это тем более важно, что Верховский не ссылался в Теория Механизмов и Машин. 2009. №1. Том 7. 5 Структура механизмов своей статье на Беннета, т.е. он создал пространственный четырёхзвенник вполне независимо. При этом он указал лишь на то, что эту задачу перед ним поставил профессор А.П. Малышев, который, судя по библиографии его главного труда [6], изданного в 1923 г., также о задаче Беннета осведомлён не был. Поэтому справедливо шарнирный пространственный четырёхзвенник называть механизмом Беннета-Верховского, что встречается в некоторых публикациях по этому вопросу на русском языке. Добавим важное. В конце своей статьи Верховский пишет: «Эта статья…предлагает совершенно новый четырёхзвенный механизм и указывает на его внутреннюю связь с прежде известными четырёхзвенными механизмами». Несмотря на большое внимание учёных к проблеме Беннета, сегодня можно утверждать, что до настоящего времени не появилось исчерпывающего ответа на вопрос: чем объяснить, что пространственный четырёхзвенник подвижен. По нашему мнению, к решению этой проблемы исследователи пока подходили недостаточно глубоко, они не формулировали чётко собственно задачу исследования. В большой степени это происходило из-за того, что многие из них не владели, а чаще просто пренебрегали теорией структуры механических систем, считая такую теорию несовершенной, или, в лучшем случае, полуэмпирической, не имеющей глубоких основ. Такое отношение к теории структуры механизмов существует и в настоящее время, хотя, вроде бы, можно было довериться таким общепризнанным научным авторитетам как академик П.Л. Чебышёв, профессор П.О. Сомов, профессор Л.В. Ассур, профессор В.В. Добровольский, академик И.И. Артоболевский и многим другим, заложившим основы теории структуры механизмов. Достаточно сказать, что выдающийся математик П.Л. Чебышёв считал одним из своих важнейших научных результатов вывод формулы подвижности плоских механизмов, которая обессмертила его имя в теории машин, широко применяется в практике и будет иметь значение всегда, как известные законы механики. Здесь это пишется не с целью порицания кого-либо, а с целью привлечь внимание учёных-механиков к важности методов, разработанных в теории структуры механизмов. Попытаемся подойти к поставленной проблеме именно с точки зрения анализа структуры механизма Беннета. Профессором В.В. Добровольским [7] было предложено различать механизмы по числу общих наложенных на весь механизм связей. Его формула подвижности кинематических цепей с дополнениями академика И.И. Артоболевского записывается в следующем виде W 6 m n m 1 k m p k , k 5 (1) где W– подвижность (число степеней свободы) кинематической цепи, m – число общих связей, накладываемых на всю цепь (m = 0,1,2,3,4), n – число звеньев кинематической цепи, k – класс используемых кинематических пар, определяющий число независимых относительных движений между соединяемыми звеньями (k = 5,4,3,2,1), pk – число кинематических пар каждого класса. Так как в механизме Беннета применяются обычные шарниры, т.е. вращательные кинематические пары, относящиеся к пятому классу (k = 5), то формула (1) при условии, что все иные кинематические пары с k < 5 не используются, получит вид W 6 m n ( 5 m)p5 . (2) Отсюда, раскрывая скобки, найдём, что W 6n 5 p5 m(p5 n) . 6 (3) http://tmm.spbstu.ru Нетрадиционные рассуждения о существовании механизма Беннета Если принять подвижность W равной единице, т.е. поставить задачу создания механизма с одной степенью свободы, что и обеспечивает механизм Беннета, и решить (3) относительно параметра m, получим m 1 5 p 5 6n . p5 n (4) Значение m = 0 в (4) означает, что никаких общих условий связи на механизм не накладывается, и такой механизм является по определению Артоболевского нулевым, или (если допустимо такое выражение) классически пространственным, работающим в полной декартовой системе координат без каких-либо стеснений и принуждений. Такие механизмы называют адаптивными или самоустанавливающимися. Для рассматриваемого случая (m = 0) из (4) получим 6n 5 p5 1 , что удовлетворяется, в частности, условиями n = 1, p5 = 1 и n = 6, p5 = 7. Последнее решение указывает на то, что классически пространственный шарнирный механизм можно создать лишь как семизвенник с семью шарнирами и с шестью подвижными звеньями (седьмое звено является неподвижным или стойкой, относительно которого и рассматривается движение). Обратимся теперь к механизму Беннета, а именно, учтём, что в нём всего три ( n = 3) подвижных звена (четвёртое звено то, относительно которого рассматривается движение) и четыре кинематических пары – шарниров ( p5 = 4). Подставив эти значения в (4), найдём, что число общих накладываемых на весь механизм связей для механизма Беннета m = 3, т.е. такой механизм является по Артоболевскому механизмом третьего семейства и описывается известной формулой Чебышёва W 3n 2 p5 . (5) Итак, существование механизма Беннета необходимо искать в пространстве, на которое наложено три общих условия связи. Хорошо известно, что удовлетворяющие этим условиям механизмы могут существовать в плоскости и на сфере, т.е. плоские механизмы и сферические. Ясно, что механизм Беннета не есть механизм плоский или сферический, а потому факт его работоспособности является основанием к поиску некоей третьей поверхности, которая бы удовлетворяла требованиям плоскости и сферы. Из теории поверхностей [8] известно, что плоскость и сферическая поверхность относятся к поверхностям постоянной гауссовой кривизны k . Под гауссовой кривизной k любой точки поверхности понимают произведение главных кривизн k1 и k 2 в рассматриваемой точке, т.е. k = k1 · k 2 . (6) У плоскости кривизны k1 и k 2 равны нулю, и это означает, что в любой точке плоскости гауссова кривизна постоянна и равна нулю. Гауссова кривизна сферической поверхности также является постоянной во всех ее точках, так как обе главные кривизны точек сферы являются обратными величинами радиуса сферы r, и значит, k = 1/r2 = const. Теория Механизмов и Машин. 2009. №1. Том 7. (7) 7 Структура механизмов Но существует еще одна поверхность, которая обладает постоянной гауссовой кривизной во всех её точках, а именно поверхность псевдосферы. Известно, что псевдосферой называют поверхность, образованную вращением плоской кривой – трактрисы около её асимптоты [9]. На рис. 2, а, показана трактриса АА', которая характеризуется постоянством длины подкасательной |PQ| = a для любой точки Р. а) B б) A’ A’ Q a O’ a O B’ A’ P A A O A A’ Рис. 2. Трактриса и псевдосфера Точка А у трактрисы есть точка возврата. На рис. 2, б, показана поверхность псевдосферы, появившаяся в результате вращения трактрисы относительно ВВ'. Гауссова кривизна псевдосферы во всех её точках отрицательна и одинакова: k = – 1/a2. (8) Две симметричные части псевдосферы разделяются параллелью АА, являющейся касательной к крайним точкам трактрисы. Параллель АА есть край псевдосферы. Псевдосферу как поверхность постоянной отрицательной гауссовой кривизны впервые описал Э. Бельтрами (1835 – 1900 гг.), поэтому её часто называют поверхностью Бельтрами. Учитывая изложенное, можно предположить, что третий четырёхзвенник кроме плоского и сферического, то есть цепь Беннета, есть четырёхзвенник псевдосферический. С точки зрения рассматриваемой в настоящей статье задачи особо можно показать, что псевдосфера есть поверхность универсальная – на ней могут быть созданы все три вида четырёхзвенных шарнирных кинематических цепей. Если провести геометрические оси шарниров на параллели псевдосферы АА, то все они окажутся параллельны между собой и параллельны геометрической оси псевдосферы, т.е. в этой плоскости может быть построен плоский шарнирный четырёхзвенник. Если провести любую другую параллель, например 8 http://tmm.spbstu.ru Нетрадиционные рассуждения о существовании механизма Беннета А'А', то оси шарниров на ней, проведенные нормально к поверхности псевдосферы, пересекутся в одной точке на оси псевдосферы, т.е. на этой параллели может быть построен сферический четырёхзвенник и, наконец, если центры шарниров расположить на разных параллелях, то их геометрические оси не будут параллельны и не будут пересекаться между собой, все они пересекутся лишь с осью псевдосферы и, таким образом, на поверхности псевдосферы может быть построен четырёхзвенный пространственный механизм, в том числе – механизм Беннета. Вернемся к известным исследованиям механизма Беннета. В работе [4] Ф.М. Диментберг предпринял попытку объяснить его работоспособность. Он назвал этот механизм – механизмом с избыточными связями, показал, что механизму присущи именно три избыточных («лишних») связи, что было безусловно верно и что должно было привести автора к выводу о том, что механизм Беннета должен работать в некоем стесненном пространстве, в каких находятся плоский и сферический механизмы. Однако автор далее делает такой вывод – в механизме Беннета «избыточные связи номинально содержатся только в кинематических парах, в механизме же в целом избыточных связей нет», [4, стр. 192]. Этим выводом автор как бы снял проблему избыточных связей для механизма Беннета, снял её без достаточных доказательств. Дело в том, что по три избыточных связи содержится во всех шарнирных четырёхзвенниках – в плоском, в сферическом и в псевдосферическом. Избыточные связи в них обусловлены тем, что у плоского механизма практически невозможно обеспечить параллельность геометрических осей шарниров, у сферического четырехзвенника практически нельзя обеспечить пересечение геометрических осей шарниров в одной точке – в центре сферы, а у псевдосферического механизма нельзя гарантировать пересечение всех геометрических осей шарниров с геометрической осью псевдосферы. Еще в 1960 году профессор Н.И. Колчин [10] показал, что число избыточных связей q механизмов, не являющихся классически пространственными, определяется (в обозначениях автора настоящей статьи) формулой q m(p n) . (9) Для механизмов, описываемых формулой (5) Чебышёва, число общих связей m = 3 и тогда по (9) для всех четырёхзвенников, удовлетворяющих (5), при p = 4 и n = 3 q = 3. Именно на эти три избыточные связи и указывал Диментберг в [4]. Утверждать, что в механизме Беннета в целом «избыточных связей нет», не было никаких оснований. Избыточные связи при m 0 всегда существуют. Чем точнее изготавливается механизм, тем в меньшей степени оказывается влияние избыточности связей на функционирование машины, но устранить их полностью можно лишь, увеличив число звеньев и шарниров до самоустанавливающегося семизвенника. Отметим далее, что псевдосфера не является единственной поверхностью постоянной отрицательной гауссовой кривизны. Известно, что кривая, вращением которой вокруг некоторой прямолинейной оси [9] образуются тела вращения, называют меридианом. Меридианом у псевдосферы является трактриса. Русским математиком Ф.Г. Миндингом (1806 – 1885 гг.), изучавшим проблему поверхностей отрицательной кривизны, были найдены ещё две кривые, которые были взяты им в качестве меридианов для образования поверхностей постоянной отрицательной кривизны. Эти два меридиана показаны в виде дуг окружностей на рис. 3, а и 3, б. В результате обращения этих кривых вокруг осей z Миндингом были получены поверхности, имеющие названия – «волчок» Миндинга (рис. 3, в) и «катушка» Миндинга (рис. 3, г). Эти поверхности также удовлетворяют условию поверхностей постоянной отрицательной кривизны, т.е. и на них может быть найдена кинематическая цепь Беннета. Теория Механизмов и Машин. 2009. №1. Том 7. 9 Структура механизмов a) б) в) г) Рис. 3. Меридианы и поверхности постоянной отрицательной гауссовой кривизны Миндинга В 1868 г. Бельтрами показал, что геометрия на поверхностях постоянной отрицательной кривизны совпадает с геометрией открытой ранее (1826 г.) Н.И.Лобачевским так называемой «плоскости Лобачевского». Геодезические (наикратчайшие) линии на поверхностях отрицательной постоянной кривизны играют роль прямых и их отрезков на плоскости Лобачевского, т.е. плоскость Лобачевского обобщает все поверхности отрицательной постоянной кривизны и, в связи с этим, именно на плоскости Лобачевского должно искать расположение третей модификации четырёхзвенных шарнирных механизмов и механизма Беннета в частности. СПИСОК ЛИТЕРАТУРЫ 1. Bennett G.T. A new mechanism. «Engineering», London, v.76, 1903, p.777-778. 2. Bennett G.T. Тhe skew isogram mechanism. Proceedings of the London mathematical society. Second series, v.13, 1914. Pр.151-173. 3. Лебедев П.А. Кинематика пространственных механизмов. – М.-Л.: Машиностроение, 1966. – 280 с. 4. Диментберг Ф.М. Теория пространственных шарнирных механизмов. – М.: Наука. Главная редакция физико-математической литературы, 1982. – 336 с. 5. Верховский А.В. Четырехзвенный пространственный механизм с цилиндрическими шарнирами, оси которых не параллельны и не пересекаются в одной точке и его исследования. Изв. Томского технологического института. Т. 46, вып.2. Томск, 1925. С.24-30. 6. Малышев А.П. Анализ и синтез механизмов с точки зрения их структуры. Изв. Томского технологического института. Т. 44, вып.2. Томск, 1923. 79 с. 7. Добровольский В.В. Система механизмов. – М.: Машгиз, 1943. – 97 с. 8. Фиников С.П. Курс дифференциальной геометрии. – М.: Гос. изд. техникотеоретической литературы, 1952. – 343 с. 9. Фоменко В.Т. Поверхности отрицательной кривизны. Соросовский образовательный журнал, №12. 1999. С. 103-108. 10. Колчин Н.И. Опыт построения расширенной структурной классификации механизмов и основанной на ней структурной таблицы механизмов. – В кн. Анализ и синтез механизмов. – М.: Машгиз, 1960. – С. 85-97. – (Труды Второго Всесоюзного Совещания по основным проблемам теории машин и механизмов). Поступила в редакцию 12.12.2008 10 http://tmm.spbstu.ru